基于扇形趋利果蝇优化算法改进的FS-K聚类算法*
2021-10-21 13:10:26曹珍贯吕旻姝朱靖雯
重庆工商大学学报(自然科学版) 2021年5期
曹珍贯, 杨 逊, 吕旻姝, 朱靖雯
(安徽理工大学 电气与信息工程学院, 安徽 淮南 232001)
0 引 言
果蝇算法(FOA)是由潘文超[1]在2012年提出的,是基于仿生果蝇群体觅食行为的寻优算法;文献[2]对果蝇算法和其他算法进行了对比,结果表明果蝇算法简单、参数少、运行效率高,并且在进化次数低时[2],果蝇算法比混合跳蛙算法[3]、和声算法、人工蜂群算法的收敛精度和收敛速度都高,适合于实际应用或与其他算法结合进行分阶段优化。但是,FOA和其他全局优化算法一样,标准果蝇优化算法也容易陷入局部最优,特别对于高维多极值复杂优化问题,在搜索计算后期收敛速度变慢,收敛精度降低。FOA算法目前的优化途径大致分为两种:对算法自身的改进;将FOA算法与其他算法结合,产生新算法。其中文献[4-5]将果蝇算法的固定步长改进为自适应步长;文献[6]将果蝇群分为搜索果蝇和跟随果蝇,分别进行全局和局部搜索;文献[7]将FOA算法与差分算法相结合,提高果蝇种群多样性;文献[8-9]也都是通过与其他算法相结合,弥补果蝇算法缺陷。智能群算法的改进应该遵循“内部完善-外部提升”[10],但是目前少有学者对果蝇算法自身的搜索特性进行改进。
针对上述问题,提出了一种基于扇区搜索机制的果蝇优化算法,并将该方法应用于K-means算法优化。本文首先介绍了果蝇算法工作原理和扇区搜索机制搜索原理,然后将改进的果蝇算法用于K-means聚类算法的优化,最后通过对比实验验证改进的FS-K算法具有更好的聚类效果。
1 果蝇算法
果蝇优化算法是一种仿生果蝇群觅食行为的算法,模拟了果蝇群的两种觅食搜索方式:嗅觉搜索(果蝇群捕捉空气中的气味逼近气味源)和视觉搜索(果蝇个体在靠近气味源的同时,使用视觉发现食物与种群位置,并靠近)[1]。
果蝇算法模拟果蝇觅食行为可以总结为以下7步:
Step1 初始化参数:群体规模S,最大迭代数M_G,随机初始化群体坐标X_axis,Y_axis。
Step2 在群体坐标周围,随机生成S个果蝇个体,L为搜索半径:
Xi=X_axis+L*(2*rand()-1)
Yi=Y_axis+L*(2*rand()-1)
Step3 由于无法得知食物位置,先计算果蝇个体与原点的距离Di,并将其倒数作为果蝇个体的味道浓度判定值Si:
Step4 将果蝇个体的味道浓度判定值Si带入味道判定函数(即目标函数),计算果蝇个体味道浓度值Smli:
Smli=Function(Si)
Step5 找出该果蝇群体中味道浓度最佳的果蝇(最小值或最大值):
[b_Smlb_index]=min (Smli)
Step6 将果蝇的最佳味道浓度值b_Sml保存下来,并且记录最优个体的坐标值作为群体坐标:
X_axis=X(b_index)Y_axis=Y(b_index)
Step7 通过迭代运算,进行寻优,重复执行上面的 step 2—step 5,并判断最佳味道浓度是否优于前一迭代最佳味道浓度,并且判断当前迭代次数是否小于最大迭代次数M_G,若是,则执行Step 6。
2 扇形搜索果蝇算法
2.1 扇形搜索原理
FOA算法在进行随机搜索时,其果蝇群产生机制是围绕群体坐标进行随机搜索:
Stacking算法既能集成各基分类器的训练结果,也能组合各种可能决定分类的相关信息,因此普遍认为其性能优于贝叶斯投票方法[41]。
Xi=X_axis+R,Yi=Y_axis+R
其中R为[-L,L]的随机数。这种搜索机制在二维空间上表现为中点为种群坐标,边长为2L的正方形,果蝇的搜索范围如图1所示。这样的搜索机制使果蝇群在搜索时总是趋向于沿着单一方向移动,限制了果蝇群搜索方向的多样性。

图1 FOA果蝇群搜索范围
针对果蝇群搜索范围的不平衡性,本文提出一种扇形搜索机制,该机制在果蝇随机搜索时,以果蝇群坐标为中心,把搜索区域划分为n个扇区,每个扇区均生成果蝇个体。具体实现方法如下:
① 划分扇区,其中t为扇区角度;
② 在群坐标周围产生果蝇群,其中L为果蝇群搜索半径,rand()为[0,1]的随机值;
Xi=Xaxis+L*sin(t)*rand()Yi=Yaxis+L*cos(t)*rand()
对FOA和FS-FOA算法进行单独5次的运行,对比了果蝇群的迭代路径,如图2。由图2可以看出:FS-FOA果蝇群在搜索食物时,有4次向上方飞行,有1次向右方飞行,而FOA果蝇群的迭代方向较为单一,总是趋向于沿着Y=X的方向飞行。说明基于扇形搜索机制的果蝇群在寻找食物源时,在种群前进方向上的选择性增加了,相较于FOA算法,FS-FOA算法的果蝇群总是朝着味道浓度最大的方向前进,而FOA算法在迭代中受到搜索范围的影响,方向单一,无法朝着味道值最优的方向前进,使得FOA算法的收敛较慢,在高维度函数优化问题中,还会陷入局部最优。
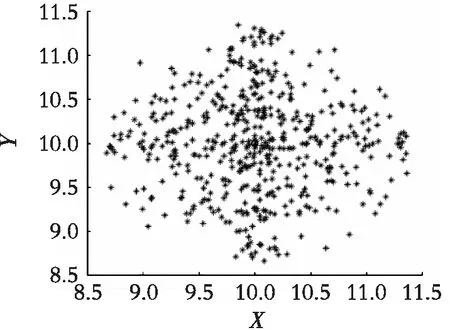
图2 FS-FOA果蝇群搜索范围
2.2 果蝇趋利特性
在自然界,果蝇在觅食过程中,其并不是随机在一个范围搜索,而是多数果蝇朝着食物源的方向飞行,少数果蝇向着其他方向搜索。受此启发,FS-FOA对果蝇个体赋予了不同的性质:趋利性和盲从性。盲从果蝇在果蝇群坐标周围随机搜索,趋利果蝇则更有方向性,总是朝着食物源一侧快速飞行,在食物源单一的情况下,趋利果蝇能够帮助算法减少无效迭代并快速收敛,在相同的迭代次数下,FS-FOA算法总能达到更高的收敛精度。
趋利果蝇的个数由趋利因子R决定,趋利果蝇个数q=S*R,其中R∈[0,1],R取值越大,果蝇的趋利性越强,但是R的取值不应超过0.5,超过0.5会导致果蝇群忽略对味道源方向的判别。趋利果蝇的方向由趋利果蝇的个数决定,其生成方法如下:
(1)
趋利果蝇的搜索步长采用自适应步长,其步长值计算如式(2)所示:
Lq=L*ln(gen+3)
(2)
其中,L为盲目果蝇的搜索步长,gen为迭代时所属方向的累计代数,gen的取值范围为gen∈[0,M_G]。趋利果蝇的自适应步长会使其拥有较高的加速度,能够较快确定食物源确切方向并向目标源飞行,同时在确定了食物源方位后也不会因为有太大的步长而忽略食物源。趋利果蝇的生成策略如式(3)所示:
Xq=X_axis+Lq*sin(θ)Yq=Y_axis+Lq*cos(θ)
(3)
3 FS-FOA算法优化K-means聚类算法
聚类算法是数据分析经典算法,属于无监督学习算法,K聚类算法的目的是将数据分为指定类,尽可能使类内样本相似度大,类间相似度小。由于算法较简单且有极强的收敛性,K-means聚类算法在处理大数据的应用背景下有广泛的应用。但是K-means聚类对初始聚类中心的选取依赖性很大,极易陷入局部解。目前比较流行的优化方法是使用群优化算法对K-means算法进行优化,减少聚类算法对初始聚类中心的敏感度[11]。
针对K-means对初始聚类中心依赖性大的缺点,本文结合FS-FOA较强的全局搜索能力与K-means算法的快速收敛性,将FS-FOA与K-means相结合产生一种新型聚类算法FS-K。FS-K相较于FOA能够较快收敛,并通过迭代寻找全局最优值,避免陷入局部最优。
算法流程如下:
Step1 对FS-K算法进行初始化:种群个数Sizepop;最大迭代次数maxgen;聚类中心数Knum。
Step2 初始化果蝇群,从样本中随机抽取Knum个数据作为一个果蝇个体,每个果蝇个体表示一种聚类中心。
Step3 将果蝇个体作为K-means的初始聚类中心,收敛得到的聚类中心作为果蝇个体的初始位置。
Step4 数据点距离所属聚类中心的欧式距离之和作为味道浓度判定函数,计算果蝇个体适应度,选择最优果蝇个体作为种群初始坐标。
Step5 在种群坐标周围随机生成果蝇群,计算果蝇个体的味道浓度,记录最优个体的味道浓度以及位置信息。
Step6 判断果蝇最优个体是否优于当前最优,如果是,将最优个体作为下一代的果蝇群坐标。
Step7 进入迭代寻优并重复执行Step5—Step6,直到达到最大迭代次数Maxgen。
4 试验与分析
4.1 优化函数测试
为了验证FS-FOA的聚类效果,采用了5种常用的测试函数进行仿真测试。为了更好对比算法的优化性能,将测试分为固定迭代次数和固定精度两种。其中固定迭代次数试验中,FOA与FS-FOA算法的最大迭代次数均取M_G=100,种群大小S=30,为保持FOA与FS-FOA的种群大小一样,把FS-FOA中盲从果蝇数量设置为20,趋利果蝇数量设置为10。固定精度试验是为了测试算法在目标精度下的迭代次数和运行时间,通过对比不同精度的函数优化来对比算法的收敛性。为了保证试验的可靠性,在初始化时,将FOA的初始化果蝇坐标X_axis,Y_axis也作为FS-FOA的初始化坐标,并将FOA与FS-FOA算法各独立运行30次,取其优化结果的平均值、最优值和方差作对比。固定迭代次数的试验结果如表2所示,在目标精度下寻优对比结果如表3所示。
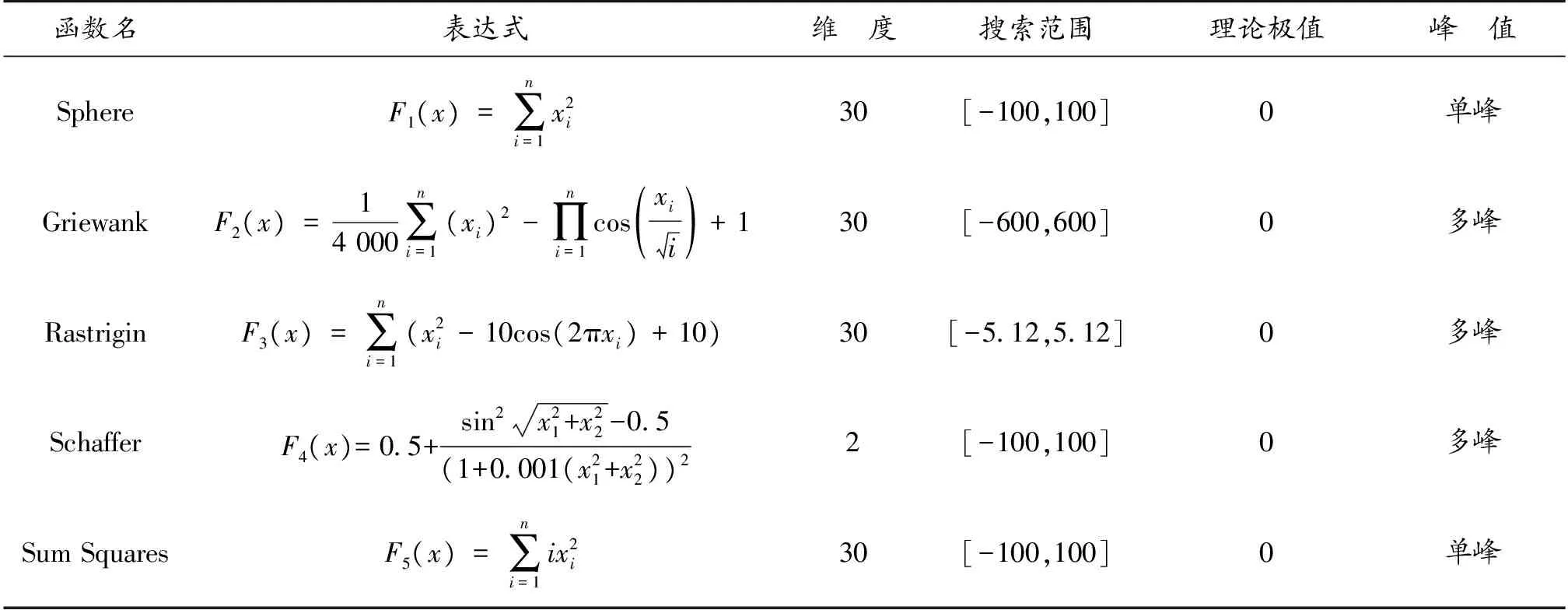
表1 测试函数

表2 固定代数寻优结果对比
由表2可以看出:FS-FOA算法在处理单峰函数F1(x),F5(x)时,寻优精度会比FOA算法高出一个数量级,在处理多峰函数F2(X),f4(x)时,寻优精度比FOA高出两个数量级,说明FS-FOA在处理多峰函数时性能提升更明显;此外,FS-FOA的方差在处理F1,F2,F3,F5时,要比FOA的方差高出4个数量级,在处理二维函数F4时,方差与FOA算法有相同数量级,说明FS-FOA算法在处理高维函数时,其寻优能力更强,稳定性更高。
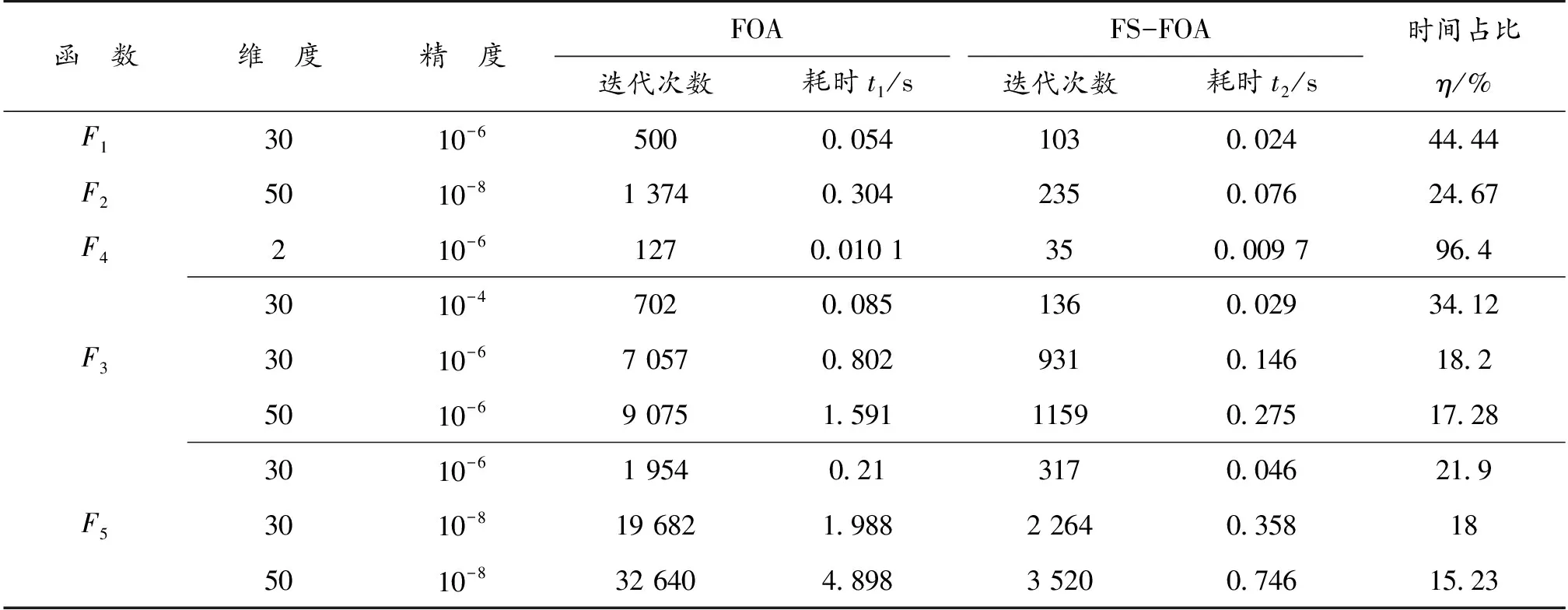
表3 目标精度寻优时间对比
对表3进行分析可知: FS-FOA算法在目标精度下的寻优时间和代数更少,对于30维F1,F2函数;FS-FOA所用时间占比为44.44%和24.67%,其中时间占比η=t2/t1,FS-FOA在处理F4函数时,时间占比为96.4%,与FOA耗时差不多,这是由于处理低维函数时,所用迭代次数太少,在时间上差距不大。但是从F3和F5函数可以看出,FS-FOA在处理目标精度更高的寻优时,其优化性能更明显,对F3函数30维在10-4和10-6精度下寻优对比,发现时间占比缩小了15.9%,对比10-6精度下30维和50维,则缩小了0.9%,说明FS-FOA是精度更高的寻优算法,其寻优性更好。
4.2 聚类试验及对比
实验采用UCI标准数据集库中的Iris,Wine,Glass,和CMC 4个数据集进行性能测试。仿真实验参数设置:初始种群个数S为50,最大迭代数为100,每组数据独立运行30次,取数据样本距离所属聚类中心的欧式距离和作为算法的适应度函数,对K-means,FOA,SOM,FCM以及FS-K的聚类结果进行对比。表4为试验得到的30次独立试验的最小值、最大值和均值。

表4 聚类结果对比
表4可以看出:FS-K的聚类结果在稳定性上要比K-means和FOA高,并且总能跳出局部解,逼近最优值,和另外两个经典算法SOM,FCM进行对比,具有更好的聚类效果。从图3可以看出,在收敛性上,K-means的收敛速度最快,能够在10代左右收敛;FS-K收敛较慢,在迭代50次左右趋于稳定;FOA收敛速度要快于FS-K,但是容易陷入局部解,其跳出局部解的能力没有FS-K强。

图3 Iris数据集聚类曲线对比
5 结 论
提出了一种扇形搜索的果蝇优化方法,弥补了果蝇算法在搜索中受限于搜索范围的缺点,增加了果蝇算法跳出局部解的能力和收敛速度。在维度高的函数优化问题中,FS-FOA算法的效果更加显著。随后,将FS-FOA算法与K-means算法相结合,提出一种优化聚类方法FS-K,并使用UCI数据集进行测试,验证了算法的可行性。但是,采用改进后的FS-K算法的聚类收敛的速度较慢,如何提高FS-K聚类的收敛速度是未来进一步的研究方向。
猜你喜欢
学苑创造·A版(2023年10期)2023-11-04 13:14:04
大自然探索(2023年11期)2023-03-01 09:04:36
岭南音乐(2022年4期)2022-09-15 14:03:12
学苑创造·A版(2022年3期)2022-03-29 23:32:16
成都信息工程大学学报(2021年5期)2021-12-30 06:25:30
阅读(低年级)(2021年6期)2021-08-09 02:38:58
学苑创造·A版(2019年6期)2019-07-11 01:07:39
幼儿教育·父母孩子版(2017年7期)2017-10-12 21:24:23
河北科技大学学报(2015年5期)2015-03-11 16:16:37
电测与仪表(2014年2期)2014-04-04 09:04:00