
智能车辆换道过程的横向运动控制研究
2021-10-19 02:55姜立标艾皖东李静轩
机械设计与制造工程 2021年9期
姜立标,艾皖东,李静轩
(1.华南理工大学机械与汽车工程学院,广东 广州 510641) (2.华南理工大学广州学院汽车与交通工程学院,广东 广州 510800)
传统汽车行业加持信息科技变革造就了智能驾驶、智慧出行和智慧城市。智能车辆的研究与应用不仅能解决交通拥堵、行车事故和环境污染等问题,还能丰富、改善人们的生活出行。随着智能驾驶技术等级的不断突破,终将实现“人-车-路-城-云-雾”多维协同的智能交通系统[1-3],智能车辆作为ITS(intelligent transport system)的核心载体,其能否实现智能、稳定、安全、高效和便捷至关重要。
智能车辆在道路上的行驶状态多以跟车和换道为主。目前GM模型、线性跟车模型、心理-生理模型、模糊推理模型和安全距离模型[4]等都已实现很好的跟车运动控制效果。而换道场景下的路径跟踪和运动控制相对复杂,不仅需要考虑车周环境,还要加入车辆稳定性及平顺性等非线性约束问题,因此对智能车辆换道过程中的控制提出了更高的需求。
1 车辆动力学建模
车辆的地面行驶需用多个状态变量描述其运动,考虑到路径规划和横向运动控制,对车辆运动做如下假设:1)忽略转向系统影响,以前轮转角作为输入;2)忽略悬架特性及其耦合作用,车辆只平行于地面运动;3)忽略载荷转移引起的轮胎特性变化,轮胎处于线性范围。
根据以上假设,建立简化后的三自由度车辆单轨动力学模型[5-6],如图1所示。其中,坐标系oxyz为固定于车身的车身坐标系,坐标系OXYZ为固定于地面的惯性坐标系。

图1 车辆单轨模型

沿x轴方向,纵向动力学方程为
(1)
沿y轴方向,横向动力学方程为
(2)
绕z轴方向,动力学方程为
(3)

在惯性坐标系上,车辆质心的运动方程为:

(4)

(5)

轮胎纵向力Fl和横向力Fc可以表示为:
(6)
式中:fl,fc为函数体;α为轮胎侧偏角,表示轮胎方向与轮胎速度方向的夹角;s为滑移率;μ为行驶路面摩擦系数;Fz为轮胎所受到的垂向载荷。
进一步考虑到车辆在实际行驶过程中轮胎的侧偏角和滑移率都较小,即β≈0,参考魔术公式[7]半经验轮胎模型[8]。
(7)
式中:F为轮胎的横向力或纵向力;D为峰值因子;C为曲线形状因子;B为刚度因子;Φ(τ)为综合滑移率,其中τ为轮胎的横向滑移率或侧偏角,是自变量;SV为曲线垂直方向的漂移。
轮胎的纵向力和横向力可以表示为:
(8)
式中:Cl为轮胎纵向刚度;Cc为轮胎侧偏刚度。
在角度较小时,前轮转角或轮胎侧偏角θ可简化为:
cosθ≈1,sinθ≈θ,tanθ≈θ
(9)
由此动力学方程可表达为:
(10)
结合前后轮侧偏角及作用力,得到小角度假设[9]下的车辆动力学模型参数表达式:
(11)
2 换道策略及路径规划
智能车辆换道行驶必须结合环境感知信息,需要完备的决策机制和无碰撞路径规划。车辆的行车环境与安全要求非常复杂,为解决智能车辆横向运动控制,对行车环境作如下简化[10-12]:1)自换道初始时刻,自车初始横向速度、加速度为零;2)在换道过程中,自车纵向速度保持不变;3)在换道过程中,目标车道内无障碍物或车辆阻碍。

图2 简化后的智能车辆换道过程示意图
将换道过程划分为3个阶段:1) 换道准备阶段t0—t1,完成换道前的准备工作,如换道路径规划等;2) 换道运动阶段t1—t2,执行已规划好的换道轨迹,同时跟随环境变化作适当修正;3) 换道结束阶段t2—t3,换道完成后在目标车道上作适当调整。
2.1 换道安全距离
在换道过程中,车辆纵向位移远大于横向位移,两车可能发生追尾碰撞或角碰[13],如图3所示,其中xa,xf分别为自车A与前车F在换道过程中的纵向位移,Ds为自车与前车不发生碰撞的换道安全距离。

图3 换道过程可能碰撞位置示意图
分析图3中位置关系可知不发生碰撞的条件为:
xa(t)>xf(t)+Lf+wasin(θ(t)),t∈[0,tp]
(12)
式中:wa为自车车身宽度;Lf为前车车身长度;θ(t)为t时刻自车航向角;tp为到达可能发生碰撞点的时刻。
令S(t)=xa(t)-[xf(t)+Lf+wasin(θ(t))], 假设两车发生碰撞时前后相接,则不发生碰撞的最小纵向安全距离MSS为:
(13)
式中:vax和aax为自车纵向速度和加速度;vfx和afx为前车纵向速度和加速度;τ为横向滑移率:σ为纵向滑移率。
实验中纵向加速度不易测量,因此设定纵向加速度为零,此时两车相对速度为常数,最小安全距离为:
(14)
实际行车中考虑换道过程初始速度等因素,需留一定的安全时间[14],此处取2 s,安全距离Ds可表示为:
Ds=2va+MSS
(15)
2.2 换道路径规划
常见的换道路径规划方法有正弦函数、梯形加速度、圆弧直线和多项式[15]。结合现有研究进展,考虑计算成本和精确程度,本文选用五次多项式建立换道路径模型,其纵向位移x和横向位移y为时间t的函数:
(16)
式中:ai和bi分别为i时刻纵向和横向的加速度,i=0,1,2,3,4,5;ti为i=0,1,2,3,4,5时的时间。
对式(16)求导,得到关于速度、加速度的方程组,系数矩阵为:
(17)
式中:A为x方向加速度的系数矩阵;B为y方向加速度的系数矩阵;T为变换矩阵;t0和te为起始和终止时刻。
换道时,车辆的纵向状态量qx和横向状态量qy分别为:
(18)
由式(16)~(18),可得基于五次多项式的换道路径系数矩阵计算公式:
(19)
将纵向车速分别设置为5,10,15 m/s,则其对应的纵向状态量qx和横向状态量qy分别为:
5 m/s,qx=[0,5,0,60,10,0],qy= [0,0,0,3.5,0,0];10 m/s,qx=[0,10,0,60,10,0],qy=[0,0,0,3.5,0,0];15 m/s,qx=[0,15,0,60,10,0],qy= [0,0,0,3.5,0,0]。
对上述3种工况进行仿真,基于五次多项式的换道路径规划方法仿真结果如图4及表1所示。

表1 不同纵向速度下横向速度及加速度极值

图4 不同纵向速度下的换道仿真结果
由分析可知,五次多项式换道路径规划方法简便灵活、曲线平滑,最大加速度远小于0.4g,满足车辆约束。
3 横向运动控制算法
3.1 模型预测控制原理
模型预测控制(model predictive control, MPC)用于处理带约束系统的优化问题[16],可求解等式约束和非等式约束的控制问题,由预测模型、反馈矫正和滚动优化三部分组成。
MPC基本原理如图5所示,在当前k时刻,预测模型根据系统当前状态量和测量信息预测系统未来状态量;求解预测时域内的开环最优问题,得到控制时域内的控制序列;再将控制序列的第一个元素作用于被控对象。在(k+1)时刻,重复上述过程,以新的测量信息作为系统未来动态的初始条件,滚动地求解满足目标函数的带约束最优化问题,不断趋近于参考目标[17]。

图5 模型预测控制基本原理示意图
3.2 非线性系统离散化
根据前面建立的车辆动力学模型,可得其非线性系统状态方程[13]为:
ξ(t+1)=f(ξ(t),u(t))
(20)

(21)

(22)
可得
Δξ(k+1)=Ak,0Δξ(k)+Bk,0Δu(k)
(23)
式中:Δξ(k+1)为(k+1)时刻状态量的变化值;Ak,0为系数矩阵;Δξ(k)为k时刻的状态量差值;Bk,0为系数矩阵;Δu(k)为k时刻的控制量差值。
为了简化计算过程,假设Ak,t=At,Bk,t=Bt,由式(20)~(23),可得系统线性化和离散化后的表达式:
ξ(k+1)=AkΔξ(k)+BkΔu(k)
(24)
式中:A(k)=I+TA(t),B(k)=TB(t),其中I为变换矩阵。
3.3 MPC控制器设计
1)预测模型。
参考文献[4]和[5]可得线性时变方程为:

(25)
式中:A和B为关于系统状态量ξ(t)和控制量u(t)的雅可比矩阵[13,18]。


采用一阶差商方法对式(25)作离散化处理,得到的线性离散化状态空间方程为:
ξ(k+1)=A(k)ξ(k)+B(k)u(k)
(26)
输出量表达式为:
η(k+1)=h(ξ(k))
(27)
式中:η(k+1)和h(ξ(k))表示的是一个集合或者一种映射关系。
2)约束条件。
①前轮转角(δf)及前轮转角增量(Δδf)约束:
-25°≤δf≤25°,-0.5°≤Δδf≤0.5°
②质心侧偏角(β)约束:
-12°≤β≤12°
③地面附着条件约束:
-2 m/s2≤ay≤2 m/s2
式中:ay为车辆纵向加速度。
④轮胎侧偏角(αf)约束:
-2.5°≤αf≤2.5°
3)目标函数。
车辆动力学模型复杂程度较高,如果希望横向运动控制器能够在较短的运行时间内得到最优解,那么需要在目标函数中加入松弛因子ε[19-20],则MPC目标函数表达式为:
(28)
式中:J(·)为目标函数;ΔU(t)为满足系统约束条件的控制增量序列;Np为预测时域;η为输出量,η=[φ,Y]T;ηref为参考输出量;Q和R为权重矩阵;Nc为控制时域;Δu为控制序列;ρ为权重系数。右侧第一项为实际输出量η与参考输出量ηref的偏离程度,反映系统对目标路径的跟踪能力;第二项为系统控制量的增量Δu,反映系统控制的平顺性。
因此,基于模型预测控制的横向运动控制器就可转化为求解如下方程的优化问题:
(29)
式中:ηk,t为状态量的集合;Δδfmin和Δδfmax分别为前轮转角增量的最小值和最大值;δfmin和δfmax分别为前轮转角的最小值和最大值;Δuk,t为控制变化量;uk,t为控制量;αy为轮胎侧偏角;ε是一个小量。
通过求解式(29)即可得到满足系统约束条件的控制增量序列ΔUt=[Δut,Δut+1,…,Δut-Nc-1]T,将第一个元素作为实际控制量u(t),u(t)=u(t-1)+Δu(t),即将前轮转角δf作为控制量控制车辆横向运动,从而实现路径跟踪。
4 实车测试验证
本文以某纯电动汽车为平台,其硬件结构如图6所示,结合环境感知模块,增加车速控制,在实车上验证换道决策、路径规划和横向运动控制效果。

图6 实验车辆硬件结构
4.1 车辆系统设计
实车搭载毫米波雷达、车周超声波雷达、高精度定位系统、工控机、自动驾驶单元(ACU)和各种附件,协同完成整车的感知、计算、控制及调试等功能。其软件及算法架构如图7所示,各部件布置及安装如图8所示。

图7 实验车辆软件及算法架构

图8 各部件布置及安装实物图
4.2 控制系统算法模型
系统模型基于MATLAB/Simulink软件平台,分为4个部分:1)数据接收,即接收来自ACU的上行数据,包括车周环境信息和车辆运行状态信息;2)数据转换,作用是将接收到的数据进行单位转换及整形滤波处理;3)控制算法,控制系统模型的核心,负责所有控制算法的计算实现;4)数据输出,将计算得到的控制量下发给ACU。
模型核心为运动控制算法,使用S函数实现,如图9所示,将带约束的最优化问题转化为二次规划问题,使用mpcqpsolver函数求解得到前轮转角控制量,再将其转化为方向盘转角控制量。

图9 运动控制算法模型
4.3 实车实验结果
对va为5 m/s、7 m/s(低速)的实验结果进行分析。由图10可知,在t=3.00 s时开始换道,在t=8.00 s时完成换道,换道持续时间为5.00 s,实验轨迹与参考轨迹的偏差最大值约为0.24 m。
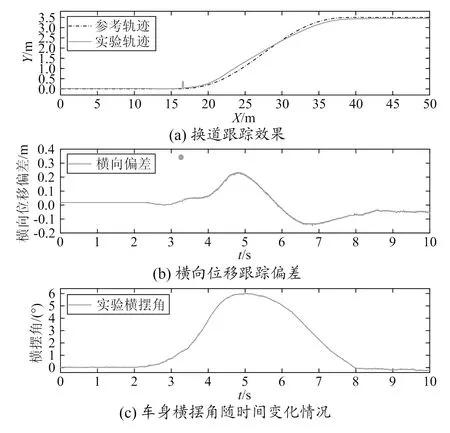
图10 换道过程中车辆状态量变化情况(va=5 m/s)
由图11可知,车辆在t=6.43 s时完成换道,换道持续时间为4.29 s,实验轨迹与参考轨迹的偏差最大值约为0.33 m。
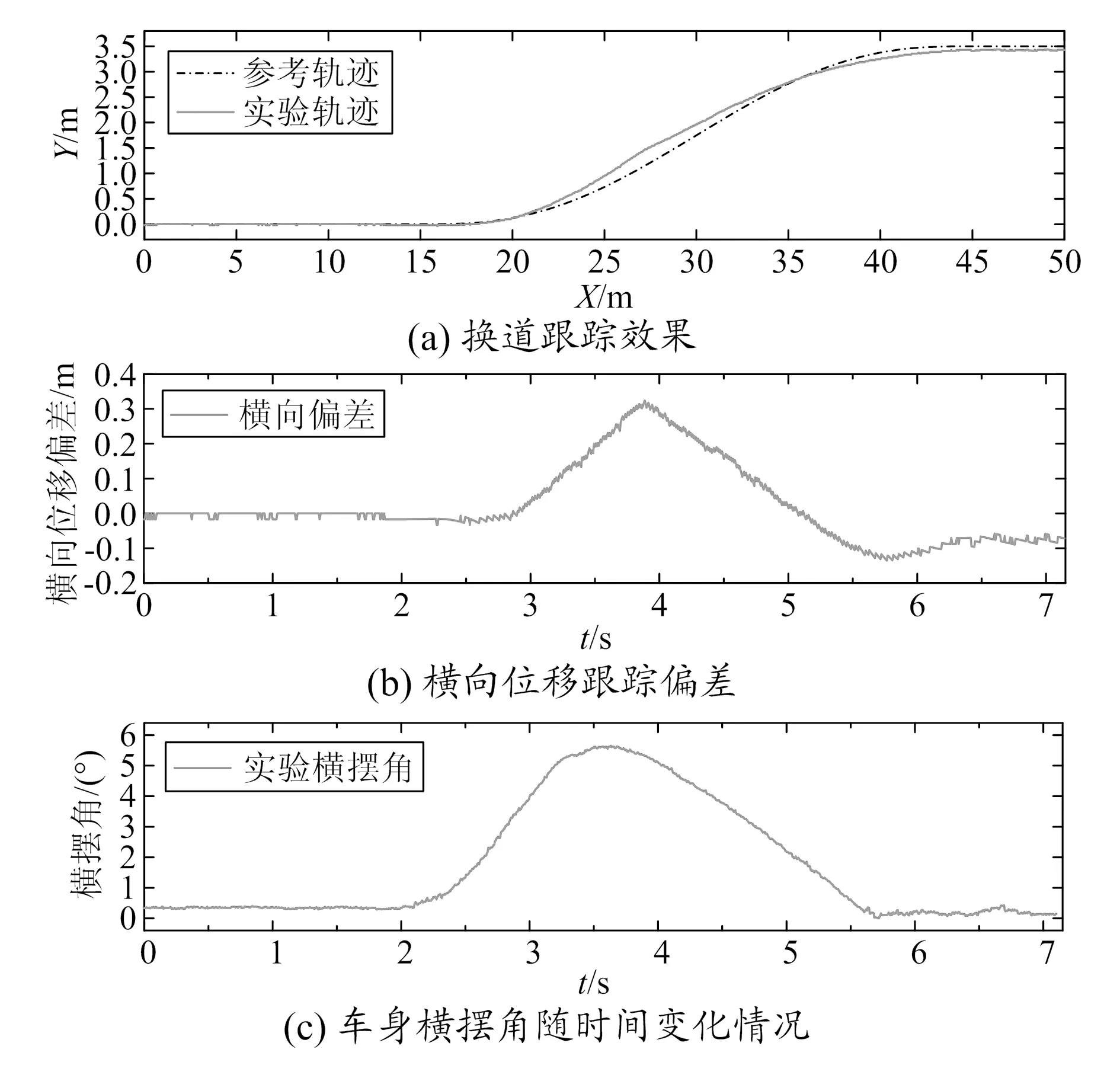
图11 换道过程中车辆状态量变化情况(va=7 m/s)
表2为低速工况下的换道控制结果。

表2 低速换道控制结果
5 结束语
本文以某校企合作的智能驾驶项目为背景,完成了智能车辆换道过程横向运动控制,主要包括感知系统、换道策略、换道路径规划、基于MPC的横向运动控制和车辆执行控制,并用实车验证了系统的有效性。
虽然行车轨迹与参考路径存在偏差,但实验车辆基本能跟踪上所规划的路径,跟踪性能良好。在简化的换道过程实验场景下,所设计横向运动控制算法基本能够实现预期功能,整体性能良好。
智能车辆的研发需要多维理论与实践知识,研究应采用多传感器融合,更为精准实时地做到车周环境重建。本文对场景进行了简化,未考虑车辆间的协同制约关系,未考虑横纵双向运动控制间的耦合关系,后续应进行更为全面的研究。
猜你喜欢
中学生数理化·七年级数学人教版(2021年9期)2021-11-20
民用飞机设计与研究(2020年4期)2021-01-21
新课程·中学(2019年7期)2019-09-17
童话世界(2019年14期)2019-06-25
幼儿教育·父母孩子版(2017年12期)2018-02-28
物理教学探讨(2018年1期)2018-02-13
解放军健康(2017年5期)2017-08-01
探测与控制学报(2015年4期)2015-12-15
橡胶工业(2015年4期)2015-07-29
橡胶工业(2015年4期)2015-07-29
