
四旋翼无人机姿态控制传感器故障的区间估计
2021-10-15 12:27杨雨薇
电子科技 2021年10期
杨雨薇,宋 芳,章 伟
(上海工程技术大学 机械与汽车工程学院,上海 201620)
近年来,四旋翼无人机(Quadrotor Unmanned Aerial Vehicle)因具有体积小、机动性强、易操作、灵活性强等特点,在军事和民用领域发展十分迅速。然而,由于无人机(Unmanned Aerial Vehicle,UAV)内部结构精细,且存在机载环境温度变化及机械振动等客观因素,无人机易出现损伤或失效,导致系统出现故障[1]。
无人机故障通常分为执行器故障[2-4]与传感器故障[5]。目前有大量研究提出了对执行器故障进行诊断的方法。文献[6]设计了H/H∞观测器对故障进行观测。为了提高观测器对噪声和干扰的鲁棒性,文献[7~8]通过设计未知输入观测器对干扰和噪声进行解耦,实现故障检测与分离。文献[9]采用小波变换,不依赖系统模型,提高了故障的可分离性。
目前应用于无人机传感器故障的诊断方法研究成果较为有限[10]。传感器一旦发生故障不仅会影响无人机的安全性和可靠性,还可能危及到地面人员的安全。因此针对传感器故障检测与诊断技术的研究已成为提高飞行器安全性和可靠性的迫切任务。在文献[11]提出了传感器故障全局观测器方法后,研究人员逐步将先进控制理论的多种方法[12-13]应用于无人机的传感器故障的研究工作。文献[14]基于观测器对四维系统的传感器故障系统进行了故障诊断与隔离。文献[15]通过设计基于线性变参数(Linear Parameter-Varying)模型的观测器,对传感器故障进行检测隔离。文献[16]提出一种基于中心对称多胞体的区间估计的方法,可以在时间采样序列中求取近似可达集来给出区间估计结果。但是该研究只验证了该方法对较低维故障系统的有效性。
本文在文献[16]故障诊断的研究基础上,建立高维无人机系统传感器故障模型,在存在干扰与噪声未知但有界的条件下,对无人机姿态控制系统的传感器故障进行了区间估计。仿真结果证明该方法可有效估计高维无人机传感器故障区间。
1 四旋翼无人机姿态控制系统的动力学模型
为了便于建立四旋翼无人机的数学模型,可做如下假设[17]:(1)四旋翼无人机为刚性结构,运动过程中质量保持不变;(2)四旋翼无人机结构完全对称;(3)地面坐标为惯性坐标系,不计重力加速度随高度的变化,不计地球曲率;(4)电机的电压-力矩函数为线性函数;(5)四旋翼无人机的质心严格位于结构中心。
1.1 四旋翼无人机姿态角动力学模型
四旋翼无人机模型如图1所示[18],机体坐标系z轴方向垂直向下。
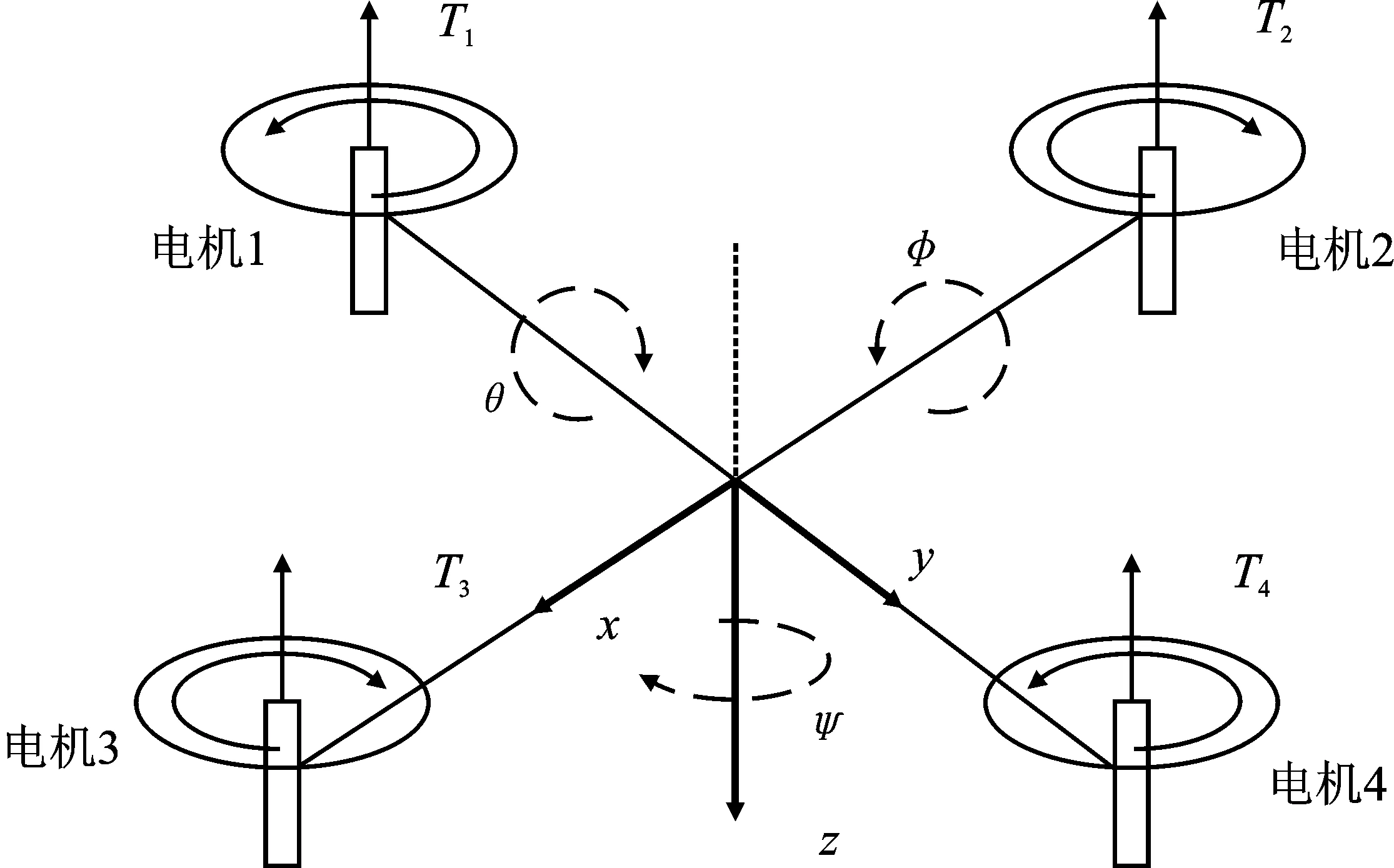
图1 四旋翼无人机模型
通过拉格朗日方程可得四旋翼无人机飞行姿态动力学模型[19]为
(1)
式中,θ、φ、ψ分别表示四旋翼无人机的3个欧拉角(俯仰角、翻转角、偏航角);Jθ、Jφ、Jψ分别表示4旋翼无人机俯仰角、翻转角、偏航角的转动惯量;uz、uθ、uφ、uψ为四旋翼无人机的4个虚拟控制输入;x、y、z分别为四旋翼无人机在3个方向上的位移。本文所研究的四旋翼无人机为小角度姿态保持时所发生的传感器故障,该种情况下,在满足假设(2)的基础上,姿态角不大于5°。由文献[20]可知,模型(1)可简化为如下非线性系统模型
(2)
令
根据牛顿运动定律,将模型(2)中的4个虚拟输入表示为4个旋翼的电机输入电压,并表示成矩阵形式
(3)
式中,Ktc和Ktn分别为电机正转与反转时的力矩系数;Kf为旋翼升力系数;ui表示第i个电机转速;l是电机到质心的距离。
对模型(3)泰勒展开并做适当的截尾处理得到如下系统模型
(4)

将模型(4)表示成一般的线性动态方程
(5)

1.2 四旋翼无人机姿态角带有传感器故障的动力学模型
基于四旋翼无人机的数据处理基本为离散采样的方案。式(5)的精确离散模型[21]为
(6)

考虑到实际飞行中,四旋翼无人机系统通常会受到一些未知干扰与噪声影响,进一步考虑传感器的故障影响,式(6)可表示为
(7)

2 四旋翼无人机姿态控制系统传感器故障的区间估计
2.1 传感器故障的特征描述
根据传感器本身特性及其运行环境的干扰不同,存在多种故障类型,主要包括偏差故障(Bias)、漂移故障(Drifting)、精度等级降低(Precision Degradation)和完全故障(Complete Failure)4种。前3种故障通常称为软故障(Soft Fault),后一种则称为硬故障(Hard Fault)。在无人机系统中,软故障是一种很典型的故障。本文根据给出的软故障模型,利用无人机姿态控制系统进行传感器故障的区间估计。
(1)偏差故障。偏差故障中,故障测量值与正确测量值相差某一恒定的常数,即
f=b
(8)
式中,b为常量;
(2)漂移故障。漂移故障是指故障大小随时间变化的一类故障,其表现形式为
f=d(t-ts)
(9)
式中,ts为故障的起始时刻;t为故障发生的任意时刻;d为常量;
(3)精度等级降低。精度等级降低时,测量的方差发生了变化,表现形式为
f~N(0,σ2)
(10)
式中,σ2为测量方差的变化。
2.2 中心对称多胞体
首先给出中心对称多胞体的定义及其性质:

(11)
(12)
式中,χ0、W、V分别表示包含x0、ω(k)和υ(k)所有可能的中心对称多胞体;p0、X0、W、V为已知向量和矩阵。中心对称多胞体有如下性质
(13a)
L⊙〈p1,H〉=〈Lp,LH〉
(13b)

(13c)

(14)
在使用中心对称多胞体对本文带有传感器故障的系统进行区间估计时,估计故障范围所需要的中心对称多胞体阶数会随着时间不断地增加,最终由于硬件计算能力的限制,无法计算极大的阶数,不利于实际应用。因此,本文给出如下引理进行降维处理。
(15)

(16)
3.3 广义系统状态观测器设计
为了估计故障f(k),将其视为增广状态,则得到如下的增广状态向量
(17)
因此可以将式(6)改写成如下的增广系统
(18)
式中,
注意到,若广义系统(18)存在一个状态观测器可以估计出广义系统(18)中的增广状态,则可以实现对原始故障系统(7)中传感器故障f(k)的区间估计。
针对系统(18)考虑如下观测器

(19)

(20)
式中,Inx+nf表示(nx+nf)×(nx+nf)维单位矩阵。
引理2[20]对于矩阵X∈Ra×b,Y∈Rb×c,Z∈Ra×c,如果rank(Y)=c,则方程
XY=Z
(21)
的通解为
X=ZY†+H[Ib-YY†]
(22)
式中,H∈Ra×b为任意矩阵;Y†表示矩阵Y的伪逆。
系统(18)中E和C满足
(23)
(24)
其中,S∈R(nx+nf)×(nx+ny+nf)是可任意选取的矩阵。
根据上述理论,求得参数矩阵T和N,结合式(18)和式(19)得
(25)

(26)

命题[19],对于给定的标量γ>0,如果存在正定矩阵P∈R(n+r)×(n+r)和矩阵W∈R(n+r)×p,W∈R(n+r)×p使得如下不等式成立
(27)

至此,针对广义系统(18)的观测器设计完毕。
2.4 传感器的故障区间估计


(28)

3 仿真分析
为了验证基于中心对称多胞体对无人机传感器故障区间估计方法的有效性,采用表1的无人机相关参数在MATLAB上进行仿真。
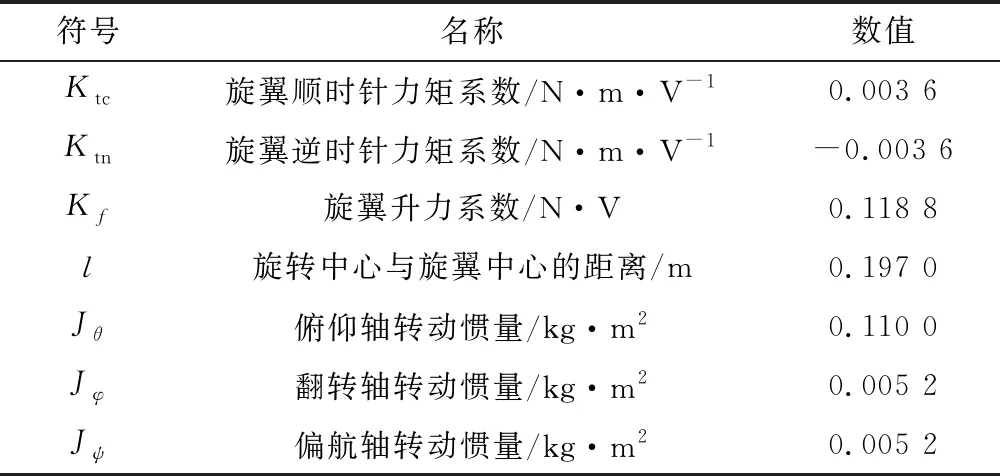
表1 四旋翼无人机相关参数[24]
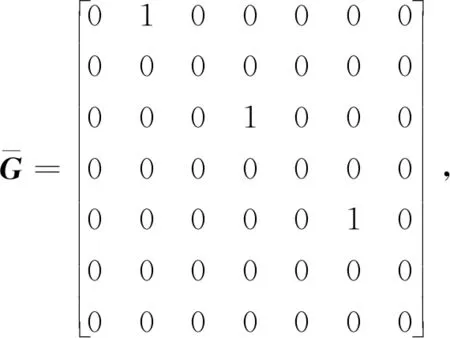
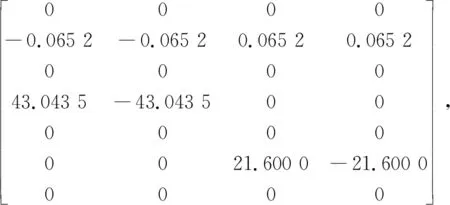
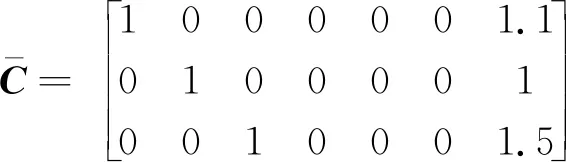
取仿真采样周期Δt=1s,则离散方程(18)中的各项参数为


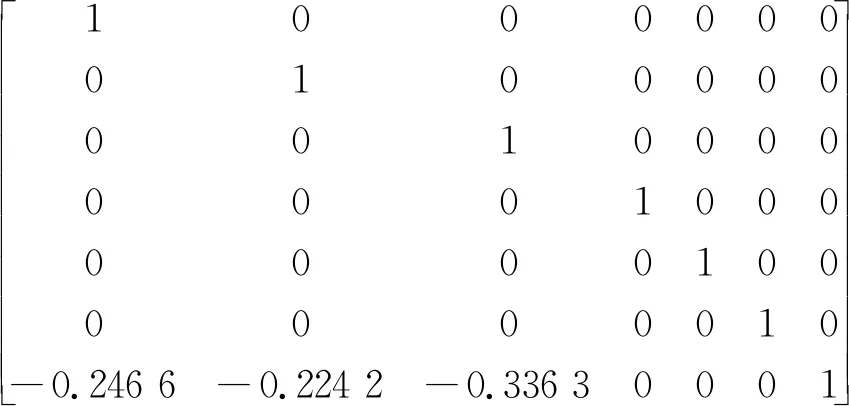
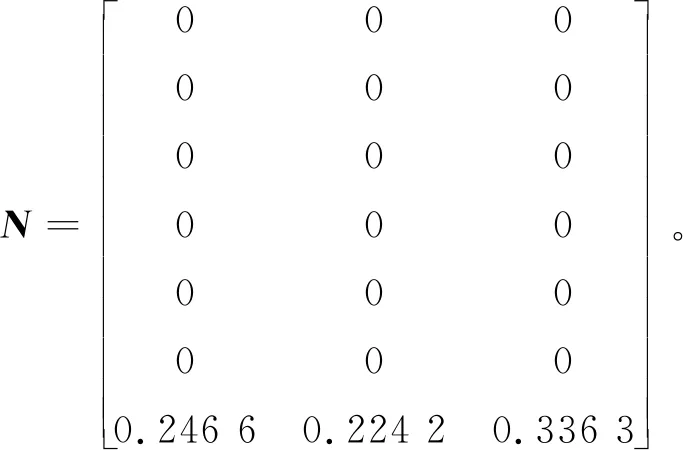
再通过引理2求出T和N分别为
T=
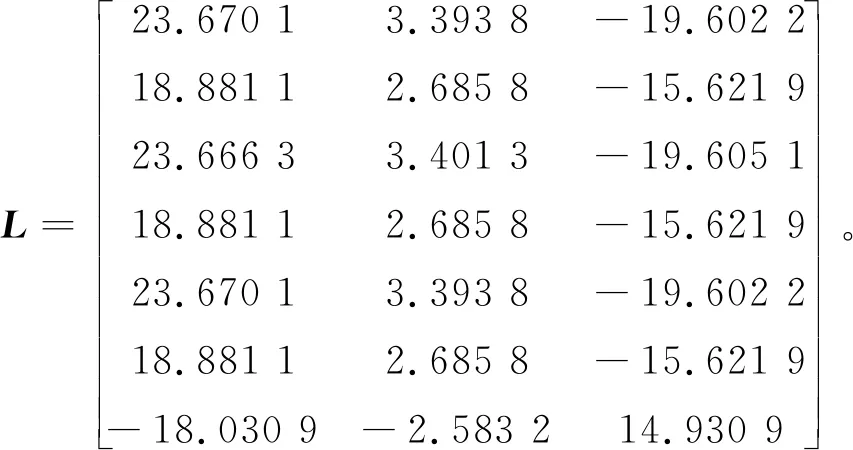
然后求解不等式(27)得到P和W,再由等式L=P-1W可得
取输入向量u(k)=[50 50 50 50]T,干扰和噪声分别为ω(k)=0.05 sink和υ(k)=[0.05 0.05 0.05]cosk,取初始向量x0=[0.1 0.1 0.1 0.1 0.1 0.1]T。
假设传感器故障分别为:
(1)精度等级降低

(2)漂移故障
(3)偏差故障
区间估计的仿真结果如图2所示。
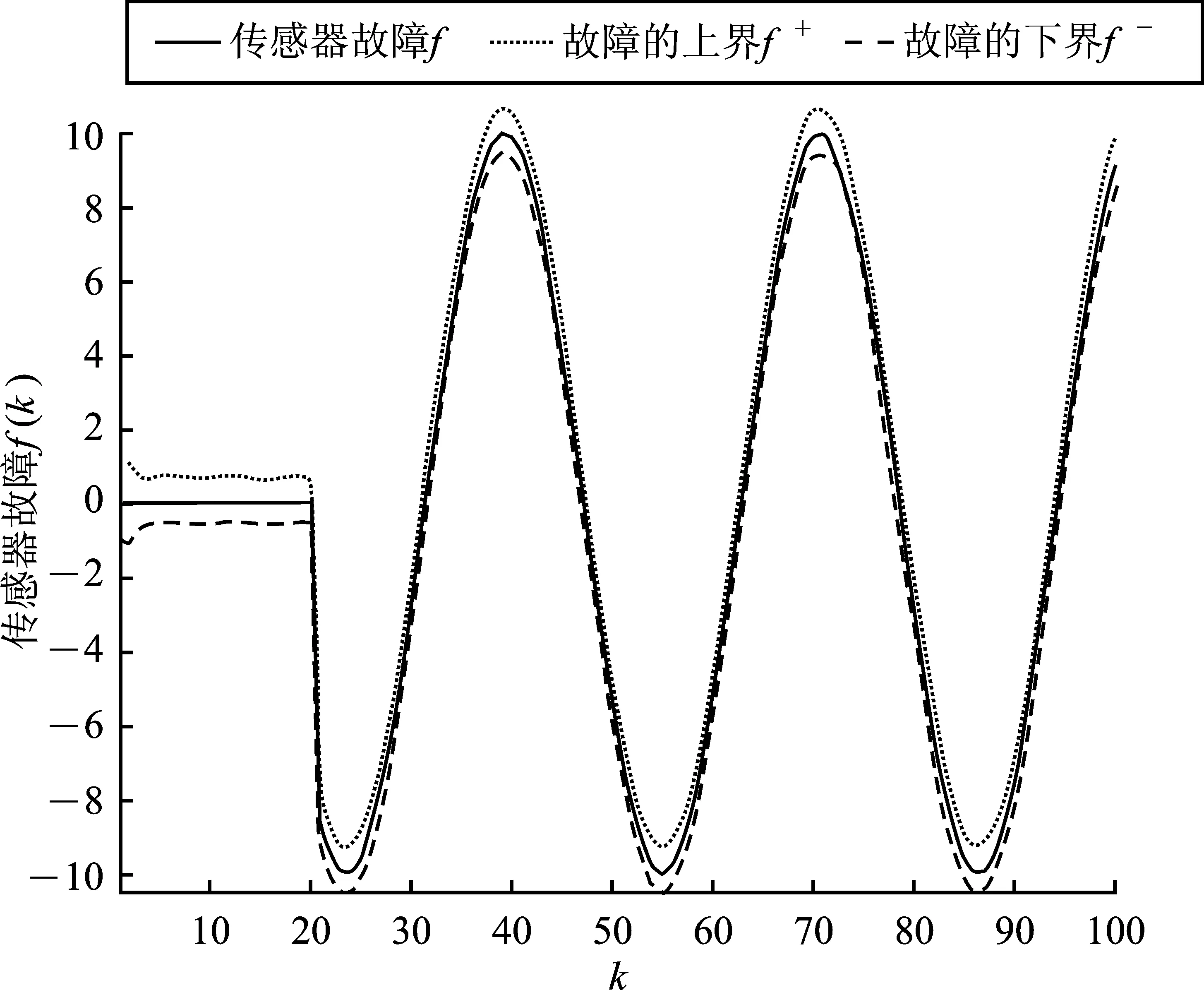
(a)
仿真结果表明,基于中心对称多胞体的诊断方法方法能够在无人机飞行姿态控制系统传感器发生任意一种软故障时,快速对其做出一个较为精确的区间估计。
5 结束语
本文针对带有传感器故障的四旋翼无人机姿态控制系统,提出基于中心对称多胞体的方法对其进行故障诊断。首先根据实际力学方程建立无人机系统模型,利用泰勒展开得到无人机的线性动态方程。通过将传感器故障视为增广状态,从而将原始系统转换成不带传感器故障的等效广义系统。然后,利用H∞技术设计鲁棒增广状态观测器并将其转化为求解一个线性矩阵不等式的问题,得到传感器的故障估计,并利用中心对称多胞体的方法对故障的区间进行估计。最后,通过仿真分析,验证了本文基于中心对称多胞体的故障诊断方法对无人机系统的有效性。本文研究的是无人机在小角度姿态保持时所发生的传感器故障,无人机在任意姿态或任意角度发生传感器故障的问题还有待继续研究。
猜你喜欢
北京航空航天大学学报(2021年9期)2021-11-02
军民两用技术与产品(2021年9期)2021-03-09
语数外学习·高中版下旬(2021年11期)2021-01-13
防爆电机(2020年4期)2020-12-14
电子制作(2019年9期)2019-05-30
北京航空航天大学学报(2016年8期)2016-11-16
初中生世界·八年级(2016年6期)2016-05-14
初中生世界·八年级(2016年6期)2016-05-14
初中生世界·八年级(2016年6期)2016-05-14
铁道科学与工程学报(2015年5期)2015-12-24
