扶镜机器人在经胸乳径路甲状腺良性疾病手术中的应用
2021-10-14 02:24:22褚亮周少波蒋磊王法宝曹登义
中国普通外科杂志 2021年9期
褚亮,周少波,蒋磊,王法宝,曹登义
(蚌埠医学院第二附属医院普通外科,安徽蚌埠233000)
甲状腺疾病是普通外科最常见的疾病之一,好发于年轻女性。传统的甲状腺手术会在颈部留下一道明显的瘢痕,严重影响患者的美观。腔镜甲状腺手术(endoscopic thyroid surgery,ETS)由于其切口更小、更隐蔽,具有显著的美容效果受到了广大患者和医生的欢迎。自从1997年Hüscher等[1]完成了第一例经胸壁入路的腔镜甲状腺手术以来的20年里,腔镜甲状腺手术已在临床中得到了广泛的应用,已经成为治疗甲状腺疾病的重要手术方式之一,也有充分的证据表明腔镜手术对于适应证内的甲状腺疾病患者是安全、可行的[2-4]。近年来,以DaVinci 为代表的机器人手术引起了广泛的关注,并在全球广泛的进行了开展。但是,机器人高昂的设备和手术耗材费用,让患者感到负担沉重,术中更换器械相对复杂且无触觉感受,也影响了术者的手术感觉。因此,扶镜机器人近年来开始得到越来越广泛的应用。扶镜机器人是一种手术辅助支架装置,是通过装在腹腔镜器械上的操纵杆进行导向操作的腔镜镜头控制系统,在术中,主刀医生可以自行操作并获得准确的、稳定的手术视野。本研究通过比较接受扶镜机器人和人工助手腔镜手术治疗的甲状腺良性疾病患者的临床资料和主刀医生主观感受的调查,评估了扶镜机器人在甲状腺手术中的应用效果。
1 资料与方法
1.1 研究对象
收集蚌埠医学院第二附属医院普外科2019年1月—2020年12月收治的80 例接受经胸乳径路甲状腺手术患者的临床资料。纳入标准[5]:(1)初次甲状腺手术患者;(2)术前检查提示甲状腺良性疾病可能,直径2~4 cm;(3)术中快速冷冻和术后病理证实为甲状腺腺瘤和结节性甲状腺肿;(4)心、肺等重要器官无严重器质性病变。排除标准[5]:(1)既往有颈部手术史;(2)术中快速冷冻和术后病理证实为甲状腺恶性肿瘤;(3)全身情况较差,不能耐受麻醉和手术者或合并有其他全身重大疾病者。根据手术方式不同分为两组,42 例采用机器人扶镜为观察组,38 例采用人工扶镜为对照组,两组患者性别、年龄、BMI、肿瘤最大直径、手术方式、病理等一般资料比较差异无统计学意义(均P>0.05)(表1)。手术均由同一手术团队完成。所有患者或其家属术前均签署知情同意书。
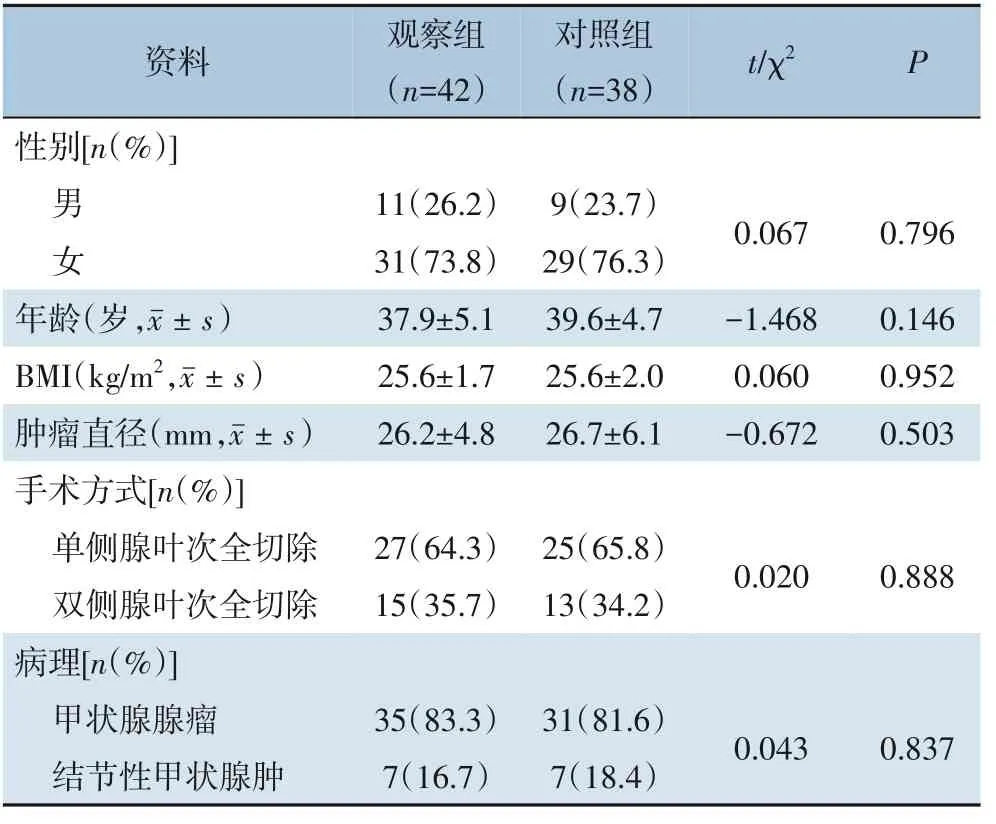
表1 两组患者的一般资料Table 1 General information of the two groups of patients
1.2 研究方法
1.2.1 手术方法两组患者均采用全身麻醉,取仰卧位,肩部垫高,双腿分开,观察组将扶镜机器人(图1A)安装到患者右侧的手术台侧栏上,手术区域消毒后铺巾,机器人主机使用无菌的一次性薄膜覆盖,在双侧乳头连线偏右处作一个10 mm的切口,皮下注入膨胀液(1∶100 000 肾上腺素生理盐水100 mL 加20 mL 罗哌卡因混合),切开皮肤、皮下组织至深筋膜,分离棒在胸前区域扇型分离建立隧道至胸骨上切迹处。置入10 mm Trocar,充入CO2气体,压力保持在6 mmHg(1 mmHg=0.133 kPa),在主机上安装万向节和摄像头支架并与镜头Trocar 保持同一直线使用控制面板上定位按钮进行镜头定位(图1B),定位成功后在支架内置入镜头并置入镜头Trocar,再在左右乳晕内上缘各作一个5 mm 的切口,分别置入5 mm Trocar 做为操作孔,在左手分离钳上安装操纵杆(图1C),术者就可以调整镜头开始手术了(图1D),首先使用超声刀在深筋膜下层进行分离,上至甲状软骨上缘,两侧至胸锁乳突肌外侧缘[6]。切开颈白线,沿甲状腺固有被膜显露甲状腺,腔镜甲状腺拉钩牵引颈前肌群。仔细游离出甲状腺下极血管并用超声刀夹闭,显露并辨认保护喉返神经,向上掀起甲状腺,切开甲状腺峡部,显露气管,紧贴甲状腺,自下而上切除甲状腺组织,至甲状腺上极时,超声刀夹闭甲状腺上极血管,切除标本,如双侧病变同法切除对侧腺体。标本由标本袋取出后送快速冷冻病理切片排除恶性病变,确认手术创面无渗血,缝合颈前肌群,放置引流管,负压球吸引。对照组手术方法同常规手术。

图1 扶镜机器人及其使用 A:机器人主机;B:控制面板;C:操纵杆;D:术中照片Figure 1 Robotic scope holder and its application A: Main body of the robot; B: Control panel; C: Joystick; D: Intraoperative view
1.2.2 问卷调查主观感受调查问卷设计主要参考主观视频评价方法[7],包括:(1)视觉疲劳度;(2)视野精准度;(3)视野稳定性;(4)术中操作感。均以5 分法进行评估,评分方式如下:1 分,无法正常手术;2 分,极度影响手术;3 分,一定程度上影响手术;4 分,轻微影响手术;5 分,不影响手术。调查由主刀医生在手术完成后2 h内填写并回收。
1.2.3 观察指标观察两组患者手术时间、术中出血量、术后引流量、术后住院天数、住院费用,并通过3 个月的门诊随访观察并发症的发生及治疗情况。
1.3 统计学处理
使用SPSS 22.0 统计软件对数据进行分析,所有数据均进行正态性检验。计数资料以均数±标准差(±s)表示,采用t检验,计数资料以例数(百分比)[n(%)]表示,采用χ2检验,P<0.05 为差异有统计学意义。
2 结 果
2.1 住院指标
两组患者均顺利完成手术,无中转开放手术,无机器人转为人工扶镜。两组在术中出血量、术后引流量、引流时间、术后住院天数和住院费用差异均无统计学意义(均P>0.05),观察组较对照组手术时间明显缩短,差异有统计学意义(P=0.012)(表2)。
表2 两组患者临床指标比较(± s)Table 2 Comparison of the clinical variables between the two groups of patients(± s)
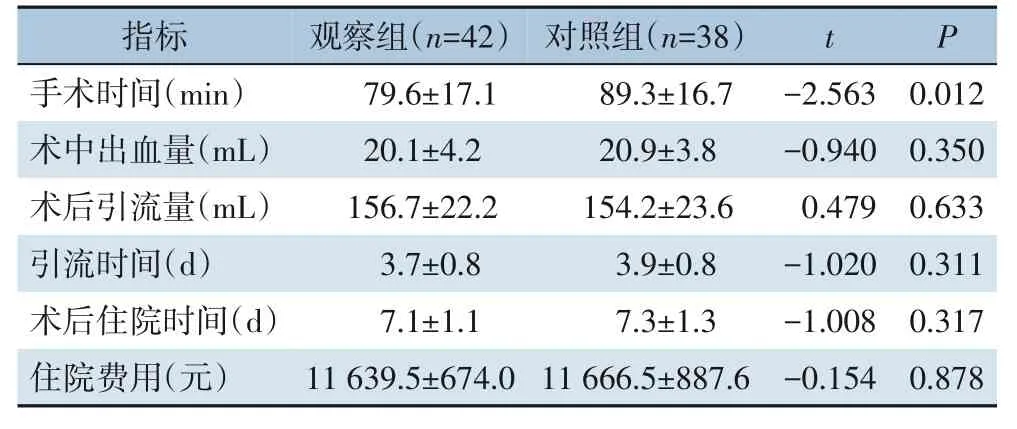
表2 两组患者临床指标比较(± s)Table 2 Comparison of the clinical variables between the two groups of patients(± s)
指标手术时间(min)术中出血量(mL)术后引流量(mL)引流时间(d)术后住院时间(d)住院费用(元)观察组(n=42)79.6±17.1 20.1±4.2 156.7±22.2 3.7±0.8 7.1±1.1 11 639.5±674.0对照组(n=38)89.3±16.7 20.9±3.8 154.2±23.6 3.9±0.8 7.3±1.3 11 666.5±887.6 t-2.563-0.940 0.479-1.020-1.008-0.154 P 0.012 0.350 0.633 0.311 0.317 0.878
2.2 并发症情况
两组患者术后均无手足抽搐、窒息、饮水呛咳、出血、切口感染等并发症。对照组有1 例双侧甲状腺次全切除的患者术后当天出现手足及口周麻木感,检查血清钙略低,甲状旁腺激素正常,静脉给予葡萄糖酸钙治疗2 d 后症状消失,术后3 d,7 d 再次检查血清钙和甲状旁腺激素均正常,请病理科检查切除的甲状腺组织,未见甲状旁腺组织;观察组有2 例患者,对照组有1 例术后第2 天发现有声音嘶哑,症状较轻,喉镜检查提示声带正常,嘱患者少说话,其余未予特殊处理,随访3 例患者均于术后1 个月时声音恢复正常。对照组2 例患者出院后1 周发现胸部皮下积液,这两例患者均为肿瘤较大,引流时间相对较长的患者,当时给予局部经超声引导下穿刺治疗,抽出淡黄色清亮液体均不足10 mL,并给予加压包扎,随访未再出现积液。
2.3 主刀医师主观感受
两组共完成并回收有效调查问卷80 份,在视野精准度和视野稳定性方面观察组明显高于对照组,差异有统计学意义(均P<0.05)。在术中操作感方面对照组高于观察组,差异有统计学意义(P<0.05)。在视觉疲劳度方面两组之间差异无统计学意义(P>0.05)(表3)。
表3 主刀医师对两组手术的主观感受评分比较(± s)Table 3 Comparison of the subjective perception scores of the operating surgeons for operations in the two groups(± s)
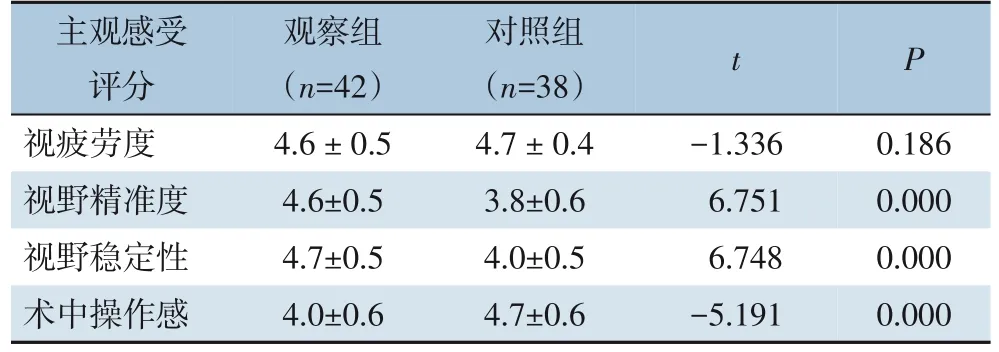
表3 主刀医师对两组手术的主观感受评分比较(± s)Table 3 Comparison of the subjective perception scores of the operating surgeons for operations in the two groups(± s)
主观感受评分视疲劳度视野精准度视野稳定性术中操作感观察组(n=42)4.6±0.5 4.6±0.5 4.7±0.5 4.0±0.6对照组(n=38)4.7±0.4 3.8±0.6 4.0±0.5 4.7±0.6 t-1.336 6.751 6.748-5.191 P 0.186 0.000 0.000 0.000
3 讨 论
近年来,腹腔镜成像技术的快速发展为腔镜甲状腺手术的的精确性和安全性提供了保障[8-10]。但是手术的摄像工作基本是由扶镜手来完成,扶镜手常常因为不能领会主刀医生的意图而不能提供满意的视野,在成熟的手术团队,也会出现由于手术时间长、疲劳等原因导致扶镜手不能使主刀医生满意的情况。扶镜机器人因其具有自主控制和视野稳定的优势,尤其适用于腔镜甲状腺手术这种需要在狭小的空间内进行精细操作的手术。其对患者的安全性和主刀医生的舒适感都有不同程度影响。
3.1 扶镜机器人对住院指标的影响
在腔镜甲状腺手术中,扶镜机器人是由主刀医生通过左手的操纵杆来控制的,手术全程只有主刀医生一人来完成,避免了扶镜手对手术的影响。Ohmura 等[11]表明,与人工扶镜相比较,扶镜机器人的手术时间和术后住院时间更短,术中失血量之间无显着差异,由于人员成本的降低,医疗费用明显减少。另一项研究[12]也表明,扶镜机器人组较人工扶镜组手术时间明显减少,术中失血量和术后住院时间差异无统计学差异。Kim 等[13]也表明扶镜机器人可以减少人工助手的参与,减少医疗费用。本研究中,与对照组相比,观察组在术中出血量、术后引流量、术后住院天数、术后引流量和住院费用方面的差异均无统计学意义,但手术时间明显少于对照组,基本与国外的研究相似。在我国,手术人员的减少并不能明显减少住院费用,但是本研究也表明扶镜机器人这一新的设备的使用,并没有增加患者的住院费用。在腔镜甲状腺手术中,影响手术时间的因素有很多,主要有术者经验、擦拭镜头及术中出血等几个方面:(1)任何手术和设备的使用均有学习曲线,Ohmura 等[11]报道使用扶镜机器人的学习曲线是5 例手术。Kim 等[13]和Aiono 等[14]也表明,扶镜机器人的学习曲线很短。在本研究中,为了消除术者手术经验造成的偏倚,所有手术均由同一团队完成,主刀医生均已完成10 例以上的扶镜机器人手术,随着操作的熟练,手术时间会进一步的缩短。(2)在术中,发现容易造成镜头模糊的主要阶段就是在建立操作空间这一阶段,因为术前皮下需注入膨胀液,在使用超声刀时就会产生的许多气雾,扶镜手在此阶段与主刀医生如配合不当,容易出现镜头模糊的情况,研究发现,在此阶段,超声刀操作时需要适当后退镜头,就可以减少镜头模糊的情况出现[15]。主刀医生可以在使用超声刀时自主操作镜头的进退,避免了配合问题,能够最大程度的避免镜头模糊的情况出现,减少擦镜次数,缩短手术时间。研究也表明,扶镜机器人的使用减少了镜头的清洗和不必要的移动,节省了手术时间[16-18]。(3)在甲状腺良性疾病的手术中由于腔镜的放大作用和超声刀的使用,使术者能够很好地减少并控制出血,但在一些特殊的部位,如在甲状腺下极附近使用分离钳显露喉返神经操作时易造成局部的出血[19]。扶镜机器人的使用,可以使主刀医生调整镜头的中心始终处于自己需要显露的地方或出血的部位,并保持术野的稳定[20],有利于手术时间的缩短。
3.2 扶镜机器人对手术并发症的影响
在甲状腺手术中,甲状旁腺损伤、喉返神经损伤、出血是甲状腺手术的主要并发症[21]。因此,术中辨认甲状旁腺、喉返神经及血管等重要结构都是及其重要的手术步骤。预防甲状旁腺损伤最重要的方法是术者在镜下用肉眼辨认甲状旁腺[22-23],防止喉返神经损伤的方法则是根据神经的位置、走形和特征来显露和辨认喉返神经[24-26]。这都需要为主刀医生提供一个清晰稳定的术野来进行仔细观察、精细解剖。扶镜机器人是由术者进行自主操作,视野和焦距都能够随时调整,使手术过程中的局部解剖更加清晰。本研究中,对照组有1 例出现手足及口周麻木感,术者分析该患者为双侧甲状腺手术,双侧瘤体均较大,解剖下甲状旁腺时,扶镜手在此处显露视野时与主刀医生的左手钳有多次的触碰,由于显露术野不佳,镜头在此处进行了多次反复调整,可能由于显露原因导致操作时有甲状旁腺或滋养血管的损伤。观察组有2 例患者,对照组有1 例出现声音嘶哑,于术后1 个月时恢复。由于两组患者在手术过程中都常规全程清晰的显露了喉返神经,考虑可能为显露解剖喉返神经时由于超声刀的局部热损伤引起,与术野的显露无关。由此可见,扶镜机器人在为主刀医生提供良好术野的同时,与人工扶镜一样具有良好的手术安全性。
3.3 扶镜机器人对主刀医生主观感受的影响
在腔镜甲状腺手术中,由于是在狭小的人造的空间内操作,因此视觉质量就成为手术安全的保障,稳定而清晰的视野可以更清晰地显示组织层面和血管、神经走行等,提高了主刀医生操作的准确性,从而使组织抓取、解剖、分离、止血等操作得以精准定位,也可以减少了主刀医生的视觉疲劳度。在对主刀医生的问卷调查显示,在视疲劳度方面,观察组和对照组无明显差异,一般手术时间越长,术者产生视疲劳的可能性越大,在本研究中腔镜甲状腺手术时间较短,故无法体现出明显的差异。在视野准确性和视野稳定性方面观察组具有明显优势,本研究中,主刀医生对于扶镜机器人最满意的地方就是精准的控制和稳定的图像,这也与文献[27]报道是一致的。在术中操作感方面对照组高于观察组。这是由于主刀医生在进行手术时需要兼顾机器人的操作,而且是用左手进行操作,但随着操作熟练程度的提高,会逐步得到弥补。
综上所述,扶镜机器人应用于腔镜甲状腺良性肿瘤手术是安全、有效的,可以缩短手术时间,并能够通过提供精准、稳定的手术视野来改善术者的手术体验,使主刀医生更加舒适。但目前扶镜机器人还没有得到广泛的应用,仍需要大规模的,多中心的前瞻性随机对照研究来进行更加全面的评判。
猜你喜欢
介入放射学杂志(2021年5期)2021-05-20 09:49:04
心电与循环(2021年1期)2021-02-05 02:19:58
中华民居(2020年3期)2020-07-24 01:48:04
婚育与健康(2020年3期)2020-06-01 07:48:29
作文·初中版(2018年5期)2018-06-11 10:00:32
金山(2017年7期)2017-07-28 02:09:51
山东第一医科大学(山东省医学科学院)学报(2015年3期)2015-06-07 10:06:37
科学家(2015年2期)2015-04-09 02:46:46
介入放射学杂志(2015年7期)2015-01-16 09:18:12
读者(2014年18期)2014-05-14 11:40:56