
北斗单频PPP车道级试验结果分析
2021-10-11 03:41李瑶黄永诚邱平武
工程建设与设计 2021年16期
李瑶,黄永诚,邱平武
(湖南省有色地质勘查局二四七队,长沙410129)
1 引言
北斗导航卫星系统(BDS)是我国自主研发的全球定位通信系统,它是继美国GPS和俄罗斯GLONASS之后,第三国自主研发的第三套卫星导航系统,从服务中国到服务亚太区域,再到如今的全球服务能力,BDS经历了3个阶段:第一代、第二代和第三代。BDS设计包括5颗静止轨道卫星、30颗非静止轨道卫星[1,2]。2020年7月31日,BDS三号完成组网并正式播发信号,标志着中国的BDS正式向全球提供服务。
自1997年Zumberge提出精密点定位技术[3](PPP)以来,PPP逐步被应用推广。针对BDS系统的应用,相关科研人员进行了较多的研究。利用GPS+BDS研究得出,北斗的轨道精度优于GEO(地球观测组织),IGSO(倾斜地球同步轨道的精度)优于0.2 m,单个BDS的PPP定位精度可以达到厘米级[4]。利用估计的事后BDS精密轨道和钟差产品,在对单BDS、单GPS和GPS+BDS-PPP的定位精度进行了比较。结果表明,单个BDS-PPP的定位精度可以达到厘米级[5]。国内学者研究表明,单北斗系统PPP的平面静态解优于1 cm,高程优于3 cm。动态定位可达到平面精度1~2 cm,高程4~7 cm[6]。目前,对北斗PPP的研究大多停留在后计算阶段,其依赖事后的精密轨道钟差产品。本文对BDS实时PPP进行了研究。建立了单频北斗实时PPP模型,并验证了模型的正确性。
2 单频BDS精密单点定位函数模型和随机模型
BDS伪距及载波相位观测值与计算值之差可用表示如下[7,8]:

式中,ΔPsrf,ΔLsrf分别为接收机r和可视卫星s某一频率f的伪距及载波相位观测值与计算值之差,m,其中,相位中心、相位绕转以及固体潮等误差均被改正;Δxsr为与频率f无关的待估参数,包括接收机r位移和对流层天顶湿分量延迟;ursT为线性化后待估参数的系数;tr为接收机钟差;tsf为频率f观测值对应的卫星钟差;Iszr为天顶方向总电子含量;βsrf为电离层归一化校正函数,βsrf=γsr40.3/f2,其中,γsr为电离层投影函数;Nsrf为频率f载波观测值浮点解模糊度;λf为频率f载波观测值波长;εP,εL分别为伪距和载波观测值噪声。
传统的无电离层联合PPP和基于原始观测的非差分非联合PPP各有优缺点。虽然没有电离层组合的PPP中的电离层延迟被观测组合所消除,但是,这种组合放大了观测的噪声(大约是原始观测的3倍)。同时,电离层自由组合PPP函数模型只适用于双频观测,不能充分利用多频观测的信息。单频PPP可以充分利用每个观测点的信息,但需要估计电离层延迟,增加模糊度参数,本文BDS单频PPP各项误差处理见文献[9]和文献[10]。
3 单频BDS实时精密单点定位性能分析
本文对单频BDS实时精密单点定位性能进行了实验分析。实验使用1台单频北斗接收机设备,天线放置于实验车顶,如图1所示。观测数据的采样间隔时间设置为1 s,截止高度角设置为7°,通过4G网络实时获取精密轨道和钟差改正数。实验环境如图2所示,观测环境一般。

图1 BDS车载天线示意图

图2 实验环境图
将定位结果展示到Google Earth中,结果如图3所示,由图3a可知,车载定位结果路线与设计路线能较好地吻合;由图3b和图3c可知,在一般路况环境下,单频接收机BDS的PPP能够实现车道级定位,并能够分辨出车辆变道行驶。
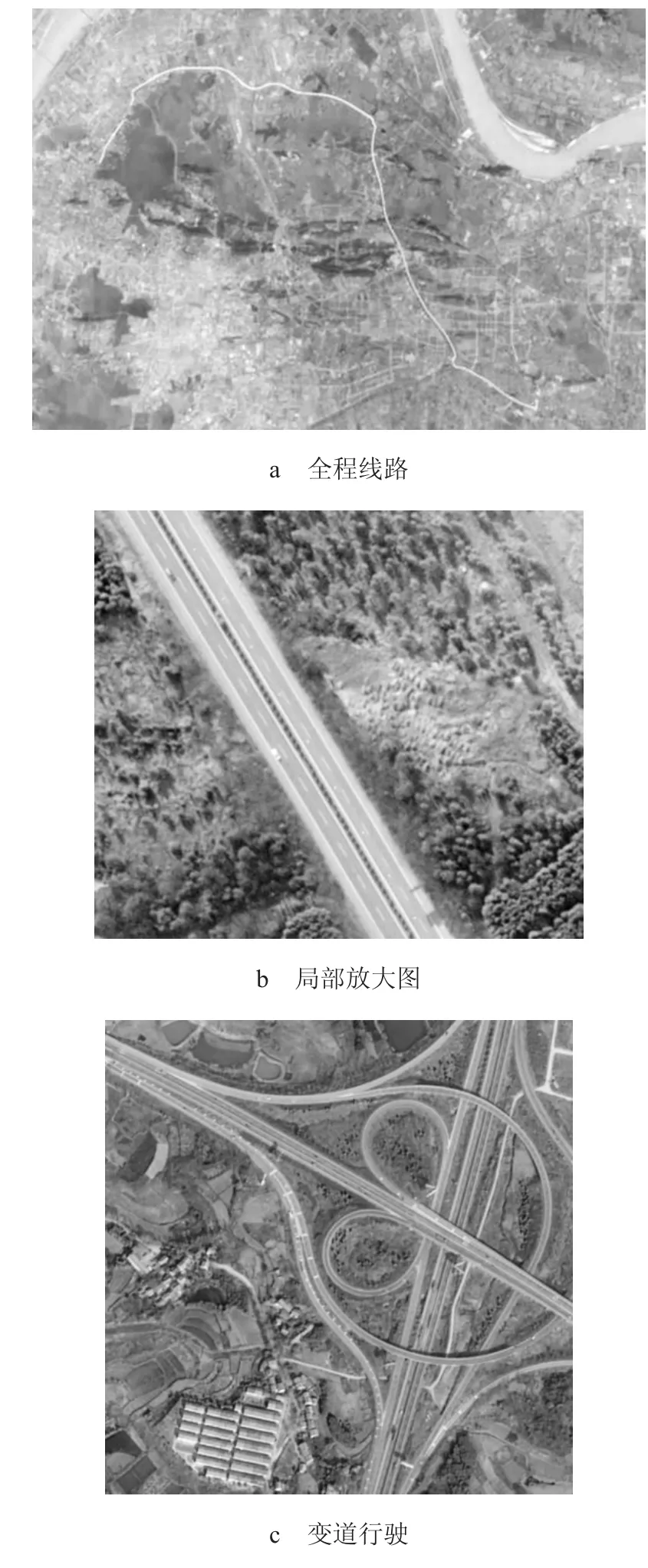
图3 单频BDS PPP定位结果展示到Google Earth结果图
4 结语
由于实时北斗PPP尚处于研发阶段,其定位性能和定位精度有待进一步提高,对待这个问题,使用单频接收机进行了车载动态测试实验。实验结果表明,本文提出的BDS单频PPP模型具有很好的使用价值,该北斗单频PPP模型可以实现车道级定位,并能够分辨车辆变道行驶,为BDS的实时应用推广做出了重要探索。
猜你喜欢
导航定位学报(2022年5期)2022-10-13
空间科学学报(2021年4期)2021-08-30
空间科学学报(2021年2期)2021-07-21
智富时代(2019年4期)2019-06-01
智富时代(2019年4期)2019-06-01
测控技术(2018年4期)2018-11-25
导航定位学报(2018年3期)2018-09-03
雷达学报(2017年1期)2017-05-17
雷达学报(2017年6期)2017-03-26
载人航天(2016年4期)2016-12-01
