基于改进SSD的变压器套管红外图像油位智能识别方法
2021-10-11 01:45:34别一凡李波江军张潮海
电力工程技术 2021年5期
别一凡,李波,江军,张潮海
(江苏省新能源发电与变换重点实验室(南京航空航天大学),江苏 南京 211106)
0 引言
电力变压器作为电力系统中重要组成,担负着功率传输和电能等级变换的枢纽作用[1—2]。其中电力变压器套管作为连接电力变压器和电力系统的关键组件,保证其拥有良好的机械结构及绝缘性能对于电力系统的安全运行具有重要意义[3—5]。由于高压套管漏油故障是严重影响电力系统稳定性的一类故障,因此套管中油位的状态信息对于套管运行状态的诊断是一个重要的评价参量[6—9]。
近年来由于红外检测技术的飞快发展,基于温度识别的红外图像检测逐渐成为电气设备故障检测的主流检测方式[10—12]。由于套管中油与空气分界面上下层介质的导热系数不同,在红外图像上分界面会出现明显的颜色区分,因此可以采用红外图像处理技术对套管油位进行识别[13—16]。现有的基于红外图像对套管油位识别的方法,主要基于人工利用红外图像仪软件,依次对红外图像中的套管部分进行框选,并结合专家经验进行诊断。该检测方案具有精度高的特点,但受限于红外图像处理软件与各品牌设备兼容性差的现状,该方案实用性较低。除此之外,该检测方案严重依赖人工框选套管区域,故而导致效率低下,智能化程度较低。因此,想要改善基于套管红外图像进行智能的油位识别,面临如下难题:红外图像中背景噪声复杂,套管区域难以直接获取;现有软件兼容性差,诊断所需参量不便提取;诊断方式过于依赖人工,效率低下。
传统算法无法有效提取复杂背景中检测目标的问题逐渐被解决[17—18]。近年来随着深度学习的飞速发展,在目标检测算法的基础上,相关图形处理算法也因其不依靠温度数据的故障检测特点为基于红外图像的电力设备智能诊断提供了新的思路[19—20]。
鉴于此,文中提出了基于红外图像的套管油位智能识别算法。首先,采用目标检测技术中的单次检测器(single shot detection,SSD)算法进行目标提取;其次,通过改进模型中的损失函数提高套管在红外图像中的识别准确率;最后,利用图像处理技术提取套管中油和空气的分界面区域作为诊断的套管油位信息,实现不依靠温度信息直接通过图像进行油位诊断的功能。
1 基于SSD的套管红外图像目标检测架构
套管红外图像的背景通常是复杂多变的。在不同的角度和距离下,图像中套管的形态差异巨大,因此需要选取一种对红外图像敏感的目标检测方法,从而实现对红外图像中套管目标的提取。
目前主流的目标检测算法有:进阶基于区域卷积神经网络(faster region-based convolutional neural netwoks,Faster R-CNN),SSD以及YOLO-v3,这3种算法在COCO数据集上训练拥有相近的准确率,但SSD以及YOLO-v3有更快的速度[21]。为了更好地从背景中识别出套管区域,需要设置较高的交并比(intersection over union,IoU)阈值,而在设定IoU阈值更大时YOLO-v3的准确率降低,因此宜选用SSD作为套管目标检测的算法。
在套管目标检测阶段,主要分为红外图像中的套管特征提取模块和多尺度特征映射预测模块,如图1所示。在套管特征提取模块当中,输入的套管红外图像首先从640×480像素被调整为300×300像素以便统一尺寸,进一步输入到以VGG16[21]为基础进行改进的卷积神经网络当中,并进行逐层特征的筛选。该改进的卷积神经网络由多个尺度不同的卷积层构成,每一个卷积层都将生成多个大小相同的小特征图,其中不同的小特征映图包含的特征均不相同,并进一步合成一张特征图作为检测分类器的依据。例如第一个特征图规模为38×38×512,其中38×38为小特征图规模,512为该层特征图的数量。
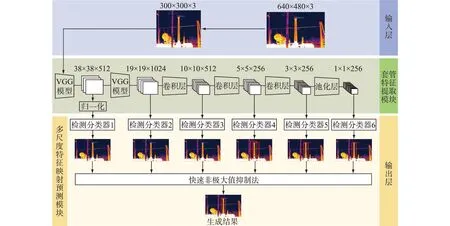
图1 基于SSD的套管目标检测方案Fig 1 Object detection strategy of bushings based on SSD
在多尺度特征映射预测模块当中,有6个检测分类器分别接收卷积模块生成的6个特征映射图,在不同尺度特征映射图上分别进行卷积计算对套管区域进行预测,旨在提高目标检测对红外图像中各个尺寸套管的检测准确率。文中以SSD为主体,对套管红外图像进行基于SSD的套管目标识别及提取来识别油位。
2 基于改进SSD的套管油位识别方法
文中首先通过SSD目标检测技术解决套管红外图像背景复杂的问题,进一步通过损失函数的修改以提高套管红外图像在目标检测模型上的识别准确率,然后通过目标检测提取出来的套管图像设计油位识别算法。
2.1 损失函数的修改
SSD的损失函数定义如式(1)所示,主要由两部分构成,分别是Lconf类别置信度损失和Lloc位置损失,其中Lconf代表目标预测框中预测的物体类别与实际类别的差距,Lloc则表示目标预测框位置与目标标记位置的差距。
(1)
式中:x为预测目标类别;c为置信度;l为预测框的相应参数;g为标记框的相应参数;a为权重;N为匹配到的矩形框数量。
在实际采集的套管数据集中,存在多图像相似的现象,有过拟合风险,因此在损失函数中加入center loss函数作为约束类内紧凑的条件,减少过拟合可能性,其定义如式(2)所示。
(2)
式中:xi为第i组数据在特征提取模块提取的特征;p为数据组数;cyi为第yi个类别的特征中心。此函数的作用在于约束每个样本的特征与特征中心距离的类内距离。通过减少每类特征到中心特征的距离解决过拟合问题,提高套管目标检测的准确度。经过改进的损失函数如式(3)所示。
(3)
式中:α,β为权重。
2.2 油位识别算法的实现
套管的红外图像如图2(a)所示,套管的结构如图2(b)所示。由于油与空气分界面上下介质的导热系数不同,易出现分界面上下温度突变,故可借红外图像对其中的突变区域进行油位识别。

图2 套管红外图像与结构示意Fig 2 Schematic diagram of the bushing and its infrared detection image
在进行红外图像处理过程中,仍需解决:
(1)套管表面不平整。由于套管结构呈伞裙状,因此在红外图像中每个伞裙之间的空隙呈现的温度都会有一定程度的突变,如图2(a)所示。因此通过横向卷积层对图像进行横线提取进而获取油位的方式不适合套管红外图像。
(2)数据质量参差不齐,最高点的温度不能完全代表油位所在处。由于拍摄当中可能存在的选取角度误差和选取温度范围误差,套管的温度最高区域可能不在油位分界面处,因此单纯提取套管区域中最高温度所在点无法进行油位的准确检测。
文中首先采用简单线性迭代聚类(simple linear iterative clustering,SLIC)算法对图像进行预处理,解决套管不平整带来的问题。SLIC算法的主要思想是将图像从红绿蓝(red green blue,RGB)颜色空间转换为国际照明委员会的标准命名颜色空间,以帮助图像中异常区域的分割。在该算法中,根据图像中的区域邻近度和颜色相似度,将图像聚类为不同的网格区域,每个区域的颜色统一且由区域内颜色的平均值表示,以减少套管表面不平整带来的油位识别难度。区域邻近度可以由式(4)—式(7)表示。
(4)
式中:S为不同聚类中心之间的距离;NT为图像的像素数量;K为期望将图像分割的超像素个数。
(5)
式中:D(i,k)为像素点i与第k个聚类中心之间的相似度;m用来权衡颜色相似度和空间临近性的影响。m越大,空间影响越大超像素更紧凑;m越小颜色影响越大,超像素更贴合图像边缘。
(6)
式中:dlab为CIE-lab空间内两点间的距离;l,a,b值分别为空间中的三维坐标。
(7)
式中:dxy为第i个点对于第k个聚类中心的欧氏距离;x,y分别为二维坐标系中的横、纵坐标。
油位识别算法如图3所示,以目标检测模型输出的套管图像作为输入,分析SLIC算法预处理减小伞裙状结构对油位识别带来的影响。进一步将SLIC预处理后温度最高的区域作为故障区域,然后以故障区域平均横坐标作一条纵轴,读取纵轴的灰度曲线并以此为依据判断故障区域中心坐标在曲线上是否为极值点。若条件满足则将该区域视为油位所在处,若条件不满足则舍弃该故障区域,获取温度次高区域循环进行检测直至条件满足。

图3 油位识别算法流程Fig 3 The flow chart of oil level identification algorithm
3 算例仿真及结果分析
3.1 实验条件
用于目标检测的原始数据集由600张在变电站中通过红外热成像仪实地采集的110~500 kV油纸绝缘套管图组成,每张原始图像的分辨率为640×480。经过数据清洗,筛选出200张合适的图像,为解决过拟合问题,通过角度旋转、随机缩放等形态学操作对筛选的200张样本进行数据增强,增强后样本数量达1 000张,选用20%的数据(200张)作为验证集,其余80%的数据(800张)作为训练集。除此之外,考虑到数据集中拍摄同一根套管的重复性,从600张原始数据集中筛选100张作为油位识别的对比数据集。实验评估指标包括目标检测模型评价参数平均精度(average precision,AP)和两种油位识别方式的相对误差。
文中实验均在配备英特尔至强银牌4114处理器、NVDIA 2080Ti显卡、128 G 内存的计算机上进行。在Python3.7环境下用Tensorflow、Keras框架实现整个算法,表1为部分实验参数设置。

表1 实验参数设置Table 1 Setting parameters of the experiment
3.2 目标检测结果
通过对所构建的数据集分别在YOLO-v3、SSD、改进SSD上进行训练以及在验证集上的验证,得到的平均精度PA值如表2所示,其中PA的定义如式(8)所示。
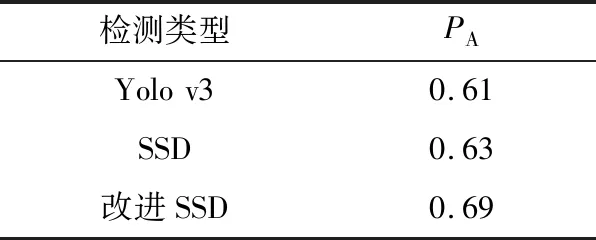
表2 不同算法的参数平均精度Table 2 The average precision of different algorithms
(8)
式中:M为测试集中预测框的总数量;ci为第i个预测框中的置信度。
由表2可知,改进SSD算法准确率比YOLO-v3高13%,且相较于改进前的SSD算法准确率提升了9.5%。
3.3 油位识别算法结果
由于基于人工提取的方法具有高精度特点,因此将文中油位识别算法计算出的油位相对高度数据与基于人工提取识别计算出的相对纵坐标值结果进行对比并计算误差。
基于人工提取的油位温度分析方法主要是利用厂家提供的红外图像处理软件提取套管中的线温度,如图4(a)所示,并将坐标与温度变化信息绘制为如图4(b)所示的折线,然后将折线对应的温度信息进行采集,提取折线中的最大值区域作为油位。通过读取坐标与温度的数据,提取最高温附近的坐标点并取平均值作为油位,采用相对位置作为指标进行记录,相对位置的定义如式(9)所示。

图4 基于人工油位检测的套管目标检测结果Fig.4 The result of bushing object detection based on manual oil level detection method
LM=(ymax-yoil)/ymax×100%
(9)
式中:LM为相对坐标;ymax为横坐标最大值,表征套管长度;yoil为最高温对应的横坐标值,表征油位距离套管顶部的长度。
文中提出的油位检测算法处理过程如图5所示,输入的套管目标图像通过SLIC计算得到相似的分块区域,然后将每个区域的色彩特征统一为该区域色彩的平均值,然后将其在转化为灰度图并提取灰度最高区域,并将提取的区域作为最终的油位信息,且以相对位置进行表征。
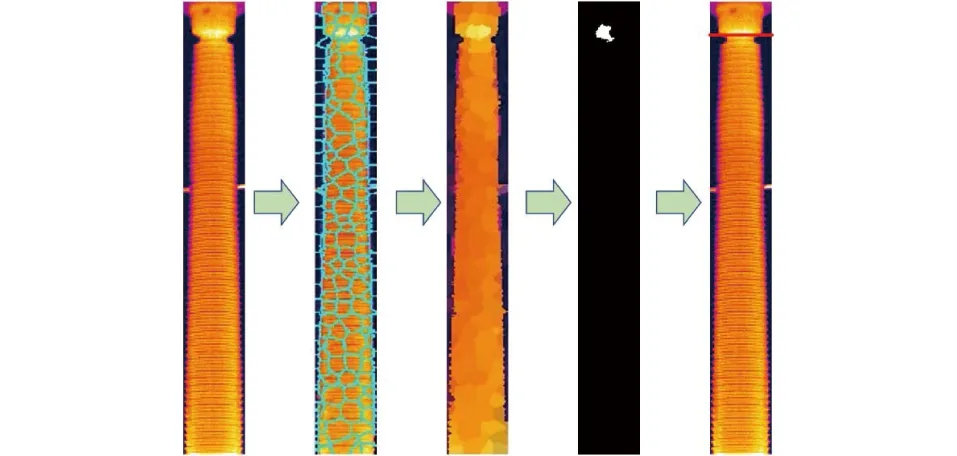
图5 基于改进SSD的套管目标检测过程Fig.5 The process of bushing object detection based on impoved SSD method
最终从初始的600张红外数据集中抽取100张图像作为油位识别算法检验的数据集,并依次将100张图的温度信息导出以计算油位信息。同时将基于图像算法计算的油位与基于人工提取的油位信息结果进行对比。其中文中提出的方法计算速度为0.5 s/张,基于人工提取的速度为2 min/张,最终检测结果为所提基于红外图像的油位识别算法计算的相对误差为0.08%。
4 结论
基于套管红外图像的智能油位识别所面临的问题,文中以现场获取的110~500 kV套管数据集为检测对象,提出了不依赖温度信息且基于SSD目标检测算法的套管油位识别算法,在与常用的基于人工的油位识别算法的诊断结果进行对比后得到如下结论:
(1)SSD目标检测技术可通过红外图像有效检测套管目标,并通过对损失函数增加center loss来提高SSD在套管数据集上的表现效果,将PA有效提升9.5%。
(2)油位识别算法中SLIC预处理和极大值点验证可分别减少由伞裙状结构和人工图像采集带来的影响。
(3)基于红外图像的套管油位识别算法可以实现油位精确识别,其与基于温度的油位识别算法之间的误差为0.08%。
本文得到国网江苏省电力有限公司科技项目(J2019008)资助,谨此致谢!
猜你喜欢
环球时报(2022-05-23)2022-05-23 11:28:37
云南化工(2021年10期)2021-12-21 07:33:34
海洋石油(2021年3期)2021-11-05 07:43:02
建材发展导向(2021年7期)2021-07-16 07:09:00
金桥(2021年4期)2021-05-21 08:19:20
电子技术与软件工程(2019年17期)2019-10-09 05:49:16
电子制作(2019年7期)2019-04-25 13:17:14
光学精密工程(2016年3期)2016-11-07 09:03:43
汽车维修技师(2016年1期)2016-08-12 06:17:31
凿岩机械气动工具(2015年3期)2015-11-11 07:32:53