
基于SHEPWM的轨道交通直线电机脉宽控制系统
2021-10-10 03:55王圣斌
电子设计工程 2021年19期
袁 畅,屈 斌,杜 阳,王圣斌
(1.中车永济电机有限公司,陕西西安 710016;2.永济优耐特绝缘材料有限责任公司,山西永济 044502)
当前轨道交通中的牵引电机主要有旋转电机和直线电机两种,直线电机驱动方式在轨道交通领域的应用与旋转电机驱动方式相比,具有明显的优势[1]。直流电机具有良好的启动性能,可以在较大范围内实现转速的平稳调节[2]。该电机超负荷能力强,热制动力矩大,适合于高起动、高调速的生产机械,应用广泛[3]。
直线电机的绕组和永磁体分别固定于常规轨道交通中的一次电机和二次电机,将永磁体或绕组敷设在轨道上,会大大增加工程成本,而且维护难度大,已成为一个迫切需要解决的技术问题[4-5]。
变频器驱动直流传动系统中的噪声问题一直是困扰人们的难题,其噪声主要由于逆变器所采用的脉宽调制方法所致[6-8]。普通PWM 方法中,逆变器的电源开关是通过“确定”来切换的,该方法在抑制电压波形中低次谐波的同时,还可使高次谐波产生较大的振幅。因此,提出了基于SHEPWM的轨道交通直线电机脉宽控制系统。实验结果表明,该控制策略能有效地抑制谐波,并能满足系统要求。
1 系统硬件结构设计
采用SHEPWM 技术,控制直线电机脉宽,从而产生控制脉宽信号来驱动电机[9-10]。选择的单片机为AT89C51,系统硬件结构如图1 所示。
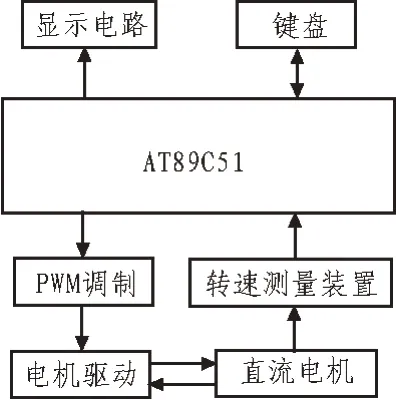
图1 系统硬件结构
采用传感器和单片机计数器进行速度测量,产生相应的脉冲信号。通过具有自身特点的电子装置,可以很容易地将电机的每一个脉冲信号安全发送给主单片机计数器[11-13]。
采用SHEPWM 方法计算速度偏差,并将速度偏差传送到单片机上用来产生脉冲宽度,然后放大驱动电路,使电机得到足够的功率,从而有利于改变控制方式。AT89C51 拥有4 kbit的闪存。该装置采用ATMEL 高密度、非易失性存储器制造技术,与MCS-51 标准指令集及输出管相兼容[14]。定时器控制寄存器TCON 可进行寻址,定时器控制寄存器TMOD 不可进行寻址,串行控制寄存器SCON 可进行寻址。可以将AT89C51 调整到0 Hz 静态逻辑操作,并支持两种可选的节能运行模式[15]。
1.1 驱动电路
驱动器将驱动信号提供给后级负载,在集成电路驱动模块L298 上驱动电机运行[16]。该电路主要是由4 个相脉冲分配器组成的,能够接收到标准的逻辑电平信号。该电路承受50 V 电压和2.5 A 相电流,还能驱动一个感应负载,采用L298 电机驱动芯片驱动直流电机。驱动电路如图2 所示。
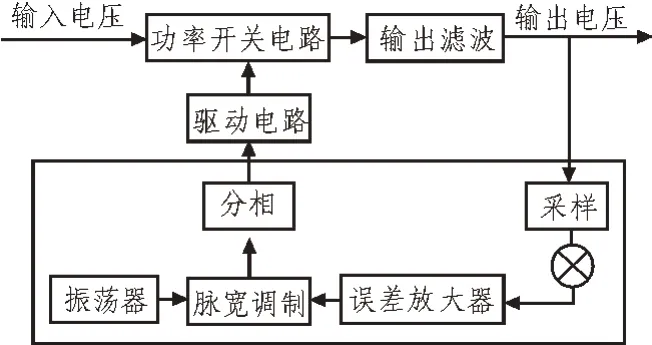
图2 驱动电路
由图2 可知,将控制电路输出的PWM 脉冲放大到足以驱动晶体管开关运行,驱动器的功能是控制电路输出PWM脉冲,放大驱动晶体管开关电源。
采用脉冲变压器实现电磁隔离的电路简单、可靠,但它的脉冲宽度受到一定限制。磁饱和效应使原线圈电流在脉冲宽度过大时突然增加;如果脉冲宽度过小,用于驱动闭门器的能量可能不足。光学隔离通过光耦将控制信号与驱动回路隔离开来,采用小阻抗输出电路解决门机的低阻抗问题。但这种光耦的响应速度慢,开关延迟时间长,限制了其自适应频率。
1.2 脉宽测量装置
脉宽测量装置最关键的部分是保证发送给每个计数器的时钟的相对延迟精度,即保证两个计数器之间的相位差。
原时钟频率一般较高,周期在10~20 ns,时钟延迟时间仅为几纳秒,采用普通延迟线芯片,不能满足精度要求;同时,为避免电路中芯片间传输延时的影响,保证测试系统的准确性、稳定性和灵活性,这种测量方法是用现场可编程门阵列实现的,脉宽测量装置结构如图3 所示。
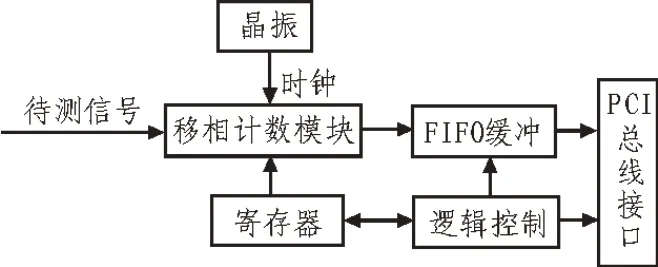
图3 脉宽测量装置结构
通过移相计数模块获得由晶体振荡器产生的原始输入时钟,从而测量脉冲宽度。为加快数据处理速度,测量结果被发送到FIFO 缓冲器。通过PCI 总线协调各个模块间的通信,实现了轨道交通直线电机脉宽控制。
2 系统软件部分设计
2.1 主CPU程序设计
电机脉宽控制系统主CPU 程序设计流程如图4所示。
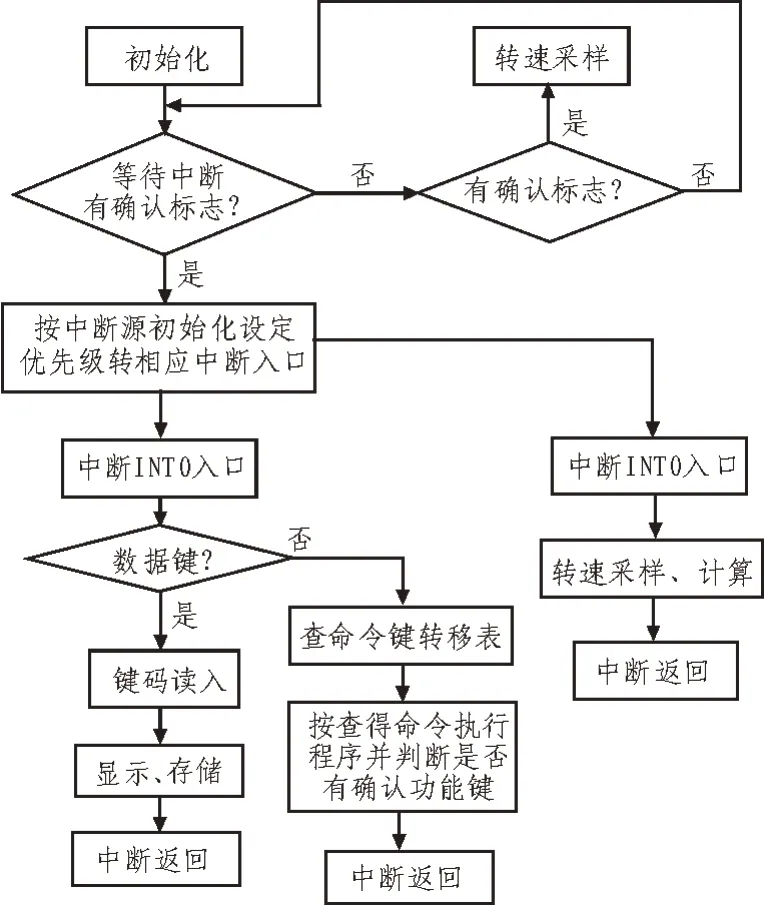
图4 主CPU程序设计流程
该流程详细步骤如下:启动主程序,设置中断入口地址,确定栈指针,清空内存,初始化内存,开启定时器/计数器,等待出现一个需要确认的标志后,同时按下采样按钮,直到定时中断,自动启动跟踪控制,把脉宽波控制数据从CPU 传送到控制器。根据中断源的中断优先级进行初始化,同时进入中断入口,根据命令执行服务程序,返回中断项,由此完成主CPU程序运作。
2.2 基于SHEPWM的脉宽控制方案设计
通过构造脉宽测量装置,实现了矢量控制。双PI 电流环可在非方波模式下同时控制电压矢量分配和角度分布。
在方波模式下,电压矢量分布固定,直流电压利用率最高;在此情况下,双PI 电流控制器已经无法保证AC 和DC 轴的电流跟踪,所以需要引入其他控制策略。在采用非方波模式前,采用双PI 控制策略对DC 轴电流进行控制,以实现对电机转矩的控制。使用PWM 不对称规则采样方式,控制轨道交通直线电机脉宽。
2.2.1 电压矢量角推导
对于矢量控制系统,电压向量空间位置角是在极坐标下得到的电压变换,而脉宽波形则产生三相电压,因此空间电压向量的位置必须转换为三相电压量,这种组合向量的三相电压是一致的命令值电压向量,对于三相电压的时域角和电压矢量的空间位置角之间关系的分析步骤如下:
先确定电压矢量,计算公式为:

式(1)中,θ表示电压向量空间位置角;±表示电机正反转;λ表示旋转参数;U0表示初始电压。
在SHEPWM 模式下,确定电压矢量后,可得到轨道交通直线电机基频电压,该电压为调制深度表征的电压幅值,通过调节该电压可确定电压矢量赋值。
2.2.2 SHEPWM脉宽动态控制
因为SHEPWM 开关角是离线计算的,所以需要用脉宽管脚来实现PWM 波发送。为保证波形精度,设置了50 s的高速断口,并分析了断口电压矢量角,将该电压矢量角加工成波角。SHEPWM 仅在一个电周期检查表上进行一次,检测此波角与当前SHEPWM开关角,使轨道交通直线电机的脉宽值相应升高或降低,从而保证消除谐振效应。设置中断间隔来实现脉宽控制,在这种情况下,高速中断被嵌套,其优先级高于主中断。
采用SHEPWM 调制谐波电压如式(2)所示:

式(2)中,fn表示谐波幅值;n表示初相;ω表示旋转角度;t表示时间。
在计算SHEPWM 开关角时,应保证开关角的基波电压相位一致,但谐波幅值在不同开关角下符号不一致。当切换不同开关角时,电压谐波相位与实际电压相位正好相反,如表1 所示。
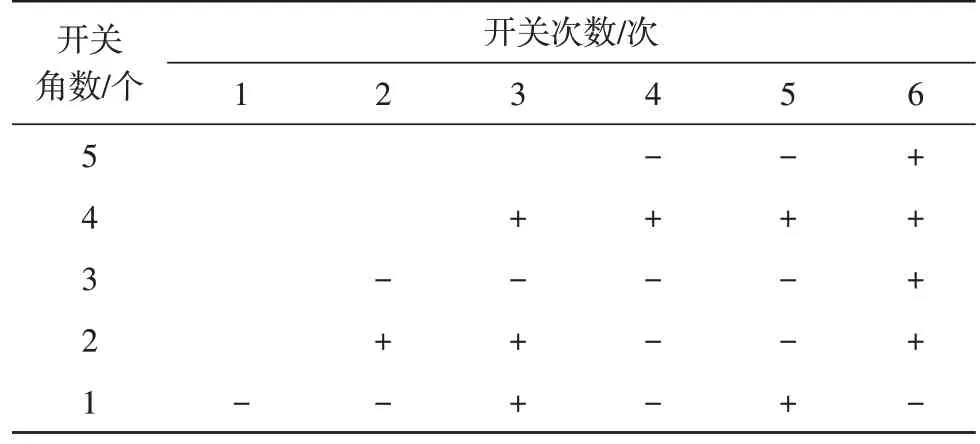
表1 各个SHEPWM下谐波幅值的正负
从表1 可知,在邻接SHEPWM 模式下,低谐波信号显示的是相反信号,也就是邻接SHEPWM 切换时,出现电压谐波突变阶段,因此,当开关点不合适的谐波电压过零时,可以看到谐波电流峰的突变。如果选择谐波电流过零点,谐波电流和正常波电流不会产生很大的电流波动。与此同时,由于电机转速波动,为了保证不同PWM 策略间的平稳切换,需要在电机开关点设置滞环。
3 实验研究
选定额定电压为+12 V的电机,以此作为基于SHEPWM的轨道交通直线电机脉宽控制系统设计合理性实验研究的主要设备,电机转速如表2 所示。
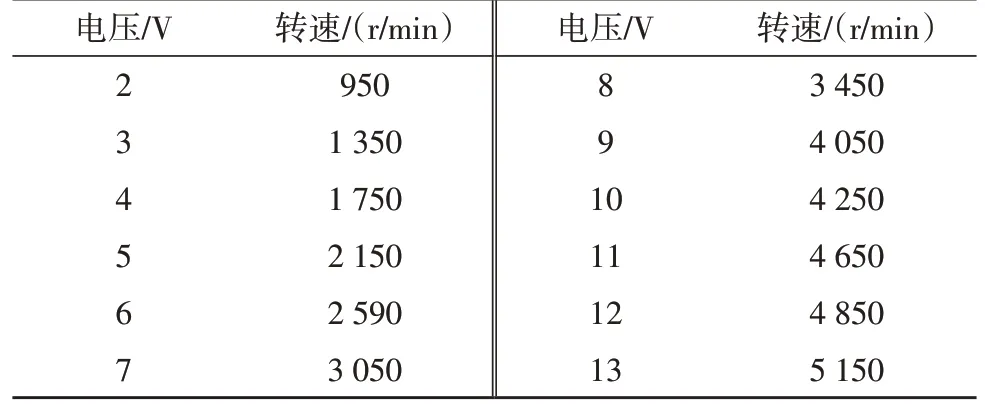
表2 电机转速
由表2可看出,电机转速随着电压的增加变大,其可以自动调整速度,能够达到控制电机转速的目的。
3.1 电机定子电流仿真波形实验研究
电机定子电流仿真波形如图5 所示。
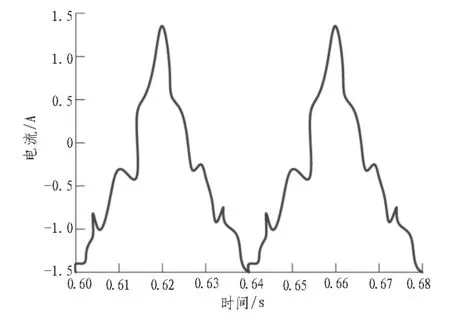
图5 电机定子电流仿真波形
随着时间增加,电机定子电流也产生周期性变化,当时间分别为0.62 s 和0.66 s 时,电流达到最大值,最大值为1.4 A。
分别使用绕组与永磁体固定方法W1、PWM 方法W2、基于SHEPWM 方法W3 设计的脉宽控制系统控制电机定子电流,其波形如图6 所示。
由图6 可知,使用绕组与永磁体固定方法W1 虽然比原始定子电流仿真波形要平滑,可抑制谐波,但同时电流控制精准度也变低,最高电流为1.0 A;使用PWM 方法W2 不仅没有消除谐波,而且电流也与原始电流不一致,最高电流为1.3 A;使用基于SHEPWM 方法W3 与原始电流大小一致,但比原始电流仿真波形要平滑,能有效抑制谐波,电流波形得到明显改善。
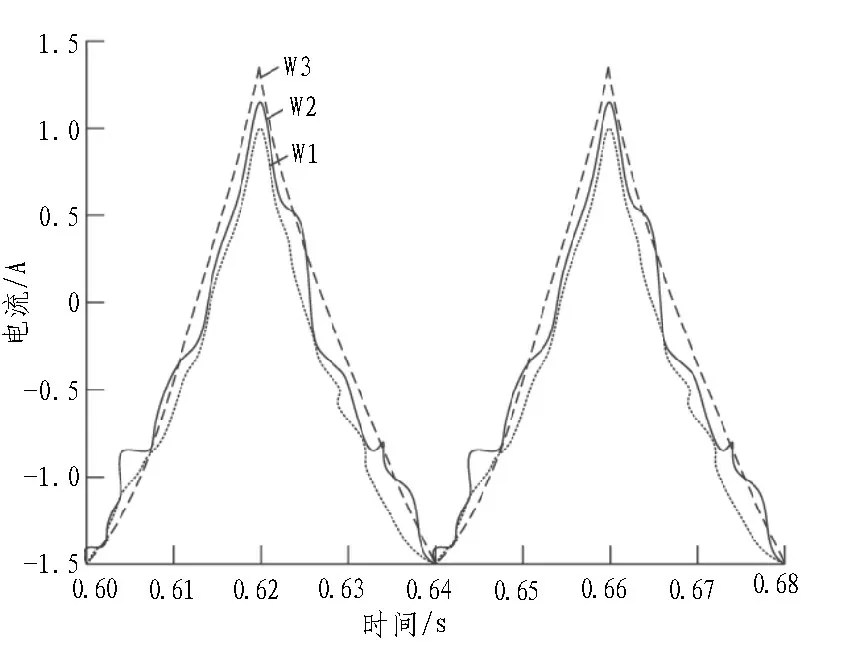
图6 不同方法控制电机定子电流仿真波形
3.2 脉动转矩仿真波形实验研究
脉动转矩仿真波形如图7 所示。
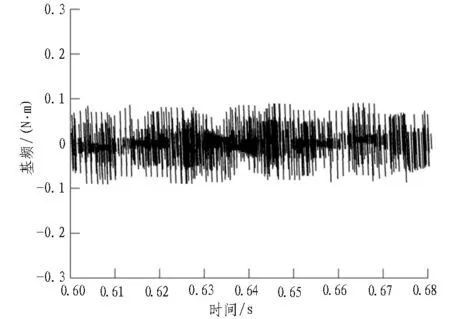
图7 脉动转矩仿真波形
由图7 可知,在相同时间下,脉动转矩基频变化不具有规律性,但基频变化范围为-0.1~0.1 N·m,说明受到一定的谐波影响。基于此,分别使用绕组与永磁体固定方法W1、PWM 方法W2、基于SHEPWM方法W3 设计的脉宽控制系统控制脉动转矩基频,其波形如图8 所示。
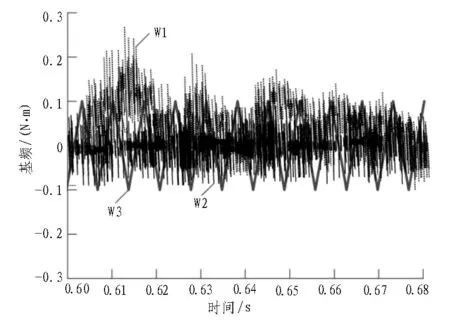
图8 不同方法控制脉动转矩基频仿真波形
由图8 可知,使用基于SHEPWM 方法W3的脉动转矩基频变化具有规律性,在-0.1~0.1 N·m 范围内变化,说明受到谐波影响较小;使用绕组与永磁体固定方法W1 和PWM 方法W2 受到谐波影响较大,其中绕组与永磁体固定方法基频变化超过了原始限值,而W2 方法虽然变化幅度较小,但个别变化幅度也超过了限值。
通过上述分析可知,使用基于SHEPWM 方法能够有效抑制谐波,有效控制电机脉宽。
4 结束语
采用SHEPWM 技术,提高了轨道交通直线电机的性能,改善了电机的脉宽控制。仿真实验结果表明,该系统既能有效地控制电机脉宽,又能很好地抑制谐波。
猜你喜欢
中学生数理化·高一版(2021年11期)2021-09-05
中国特种设备安全(2021年9期)2021-03-02
测控技术(2018年2期)2018-12-09
现代防御技术(2016年1期)2016-06-01
通信电源技术(2016年3期)2016-03-26
新高考·高一物理(2016年1期)2016-03-05
焊接(2016年5期)2016-02-27
黑龙江工程学院学报(2015年5期)2015-12-04
电源技术(2015年11期)2015-08-22
电测与仪表(2015年8期)2015-04-09
