基于信号经验模态分解与分集合并的齿轮故障诊断
2021-10-08 03:26:12邓博元崔伟成曾庆松李晨瑄
计算机测量与控制 2021年9期
邓博元,崔伟成,曾庆松,李晨瑄
(海军航空大学,山东 烟台 264001)
0 引言
齿轮传动是各种工业设备中应用广泛的机械传动方式之一,具有结构紧凑,工作可靠等优点。但是,齿轮也是故障发生较多,故障检测困难的零件之一。统计数据表明,齿轮箱中的齿轮发生故障的比例高达60%[1]。齿轮一旦出现故障,轻则会影响设备正常运转,严重的甚至会危害操作人员的人身安全。所以对齿轮故障的及时检测诊断具有十分重要的意义。
当前,通常使用振动信号分析的方法对机械设备进行故障诊断。齿轮发生故障时的振动信号可以看做多个调频—调幅信号的叠加,具有非平稳,非线性的特点[2]。同时,由于机械设备运行时的背景噪声以及振动信号传输路径等因素的影响,从包络谱中直接获取齿轮故障的特征频率较为困难,如何从复杂的齿轮振动信号中提取出故障特征信号成为了当下研究的热门话题。
针对振动信号非平稳、非线性的特点,目前应用较多,效果较好的方法是信号自适应分解类方法,尤其是基于经验模态分解(empirical mode decomposition,EMD)的故障诊断方法。该类方法的主要流程是首先对原始信号进行EMD分解,得到多个本征模态函数(intrinsic mode function,IMF);之后依据某种准则(如峭度准则)选取一个最优IMF作为含有故障信息的有效分量;最后对选取的有效分量进行包络谱分析,判断齿轮是否存在故障以及故障类型[3-4]。
但是在使用过程中,发现此类方法存在4个问题,一是由于EMD算法存在模态混叠问题,即在对信号进行分解时有可能将一个分量分解成多个IMF[5-6]。发生模态混叠时分解出的单个IMF携带的有用信息较少且没有物理意义;二是最优分量的选取准则不明确,多数情况下是利用以往经验选取峭度准则作为信号分量的最优判据,但是依据峭度准则选出的最优分量不一定是携带有用信息最多的分量;三是含有故障特征的振动信号会将多个载波进行调制,其传输路径也不尽相同,这就导致了即使未发生模态混叠,EMD分解也会产生多个含有故障信息的IMF;四是振动信号往往含有大量的背景噪声,EMD分解得到的IMF中也会含有较多的噪声,信噪比得不到显著提高。基于EMD的齿轮故障诊断方法通常选取分解的最优分量作为分解得到的有效分量进行分析,这样一来会丢失其他分量中所携带的故障信息,也无法有效降低噪声。这就导致了采用这种方法得到的故障特征不明显。
为了解决问题一、二,本文对EMD分解产生的IMF进行筛选、合并,在剔除不含故障信息或只含有极少故障信息的分量后,依据频率相近,峭度相似的原则对有可能是过分解产生的IMF进行合并。
为了解决问题三、四,充分利用多个IMF中携带的故障信息,可以借鉴无线电通信中的信号分集合并技术。信号分集合并技术主要指接收机通过多个信道(时间、频率或者空间)接收承载相同信息的多个副本,将这些副本中的信息合并后就可以比较正确的恢复出原信号[7]。由于振动信号经过EMD分解后,故障信息通常蕴含在多个IMF中,相当于有用信息经过多个不同的信道进行传输。此外,由于故障特征信号多为低频信号,信号分集合并中的包络叠加还可以过滤掉大部分高频噪声的影响,进一步提高信噪比。
本文提出了一种基于信号经验模态分解和分集合并技术的齿轮故障诊断方法。首先,将原始信号进行EMD分解,在得到的IMF中依据某种准则(本文采用峭度准则)剔除不含有用信息的分量(如峭度较小的噪声分量)后,将剩余的IMF作为有效分量,其次对有效分量进行合并,若相邻有效分量峭度差别不大则认为是EMD分解时发生了模态混叠,对这两个有效分量求和作为新的有效分量。之后对有效分量进行希尔伯特变换求取其信号包络。最后将所有有效分量的包络相加。分析包络叠加后的频谱,即可对齿轮是否发生故障以及故障类型做出判断。
1 基本理论
1.1 齿轮故障振动信号数学模型
齿轮发生故障时,其振动信号为一组调频—调幅信号的叠加,可用下式表示[8]:
(1)
其中:ai(t)>0为gi(t)的瞬时值,fi(s)>0为gi(t)的瞬时频率,φi为gi(t)的相位。而实际中的信号通常由许多本征模态分量和噪声信号组成,因此非平稳信号模型可以表示为:
(2)
其中:Q是本征模态分量的数量,n~N(0,σ2)表示均值为零,方差为σ2的高斯白噪声。
1.2 EMD原理
EMD是一种适用于非线性、非平稳信号的自适应时频处理方法[9]。EMD的特性使其在处理复杂的信号时有很大优势,其典型应用就是对齿轮的振动信号进行处理用以进行故障诊断。原始信号通过EMD分解可以得到一组本征模态函数,各个IMF分量的成分与信号本身的变化及分析频率相关。EMD分解的步骤如下[10]:
1)确定信号的极大与极小值点,将极大、极小值点分别用一条光滑的曲线相连,得到原信号的上、下包络线,并求其平均值记为m1(t),求出:
h1(t)=x(t)-m1(t)
(3)
若h1(t)满足IMF的条件,则h1(t)就是x(t)的第一个分量。
2)如果h1(t)不满足IMF的条件,则把h1(t)作为原始数据,重复进行步骤(1)K次,直到得到h1k(t)=h1(k-1)(t)-m1k(t)满足IMF的条件,此时将h1k(t)作为一个IMF。记c1(t)=h1k(t),则信号x(t)的第一个IMF为c1(t)。
3)将x(t)与c1(t)做差,得到:
r1(t)=x(t)-c1(t)
(4)
将r1(t)重复步骤(1),(2),得到c2(t)为第二个满足IMF条件的分量,重复进行n次得到n个IMF,即:
(5)
直到rn(t)中无法再提取出满足IMF条件的分量。则原信号可表示为:
(6)
因此,一个信号通过EMD可分解为n个IMF分量和一个残量rn(t),原信号为n个IMF分量和残量rn(t)之和,其中,分量c1(t)、c2(t)、…、cn(t)分别表示从高到低不同频率段的信息。
1.3 信号分集
信号分集是无线电通信领域对抗信道衰落,提高信噪比,降低误码率的常用方法之一,包括信号的分散传输技术和合并接收技术[11]。本文主要利用其中的分集合并技术对齿轮振动信号经EMD分解后得到的IMF中蕴含的故障信息进行整合分析。
信号分集的基本原理是是同一信息通过多个统计独立的信道(又称分集支路)到达接收机,由于接收机收到的信号的小尺度衰落是相互独立的,所以接收到的信号同时处于深衰落的概率非常小,因此采用信号分集合并技术可以将两条或多条分集支路上携带的有用信号副本采用不同的策略合并起来,增强有用信号的信号幅度,提高信噪比[12-14]。要想使得信号分集获得最好的效果,就需要保证各分集支路场强(或功率)的联合概率密度函数等于信道的边缘概率密度函数之积,即分集支路之间是统计独立的。分集支路之间的任何相关都会降低分集的效果。支路信号之间的相关性使用信号包络和的相关系数表示,计算公式如下[15]:
(7)
对于两个统计独立的信号,相关系数为0,在实际的工程实践中,当相关系数低于0.5时,一般认为已经被有效的去相关[11]。而EMD分解出的IMF通常满足该条件,因而可以使用信号分集合并技术对多个IMF中携带的故障信息进行综合分析。
2 基于EMD与信号分集的故障诊断方法
2.1 有效分量的选取与合成
齿轮振动信号在经过EMD分解之后会得到数个含有故障振动信息的IMF,但是并不是所有的IMF都包含故障信息,通常只有某几个IMF包含故障信息。在进行后续处理前,首先要从EMD分解得到的IMF中剔除不含故障信息的IMF,筛选出包含故障信息的IMF。
1)无效分量的剔除:
峭度(Kurtosis)是一个描述波形尖峰度的无量纲参数,对于信号中的冲击特性比较敏感。峭度的数学定义为[16]:
(8)
式中,E(x-μ)4表示信号的4阶数学期望,σ为信号标准差,μ为信号均值,x为齿轮的振动信号。
当齿轮出现故障时,其振动信号的尖峰度会增大,相应的,峭度值也会增大。所以峭度值越大,说明齿轮越偏离正常状态,此时信号中蕴含的故障信息越丰富[17]。因此,在筛选IMF时应将峭度值低于某一阈值(本文选取所有IMF峭度的平均值)的分量剔除,选取峭度值较高的IMF作为有效分量的备选,才能较好的提取出齿轮的故障特征信息。
2)有效分量的合成:
EMD算法是根据信号的局部极值画出两条包络线,进而得到均值曲线。但由于间歇现象,导致信号中的局部极值点发生变化,包络线中包含了间歇信号与原始信号的极值点。此时的均值曲线存在误差,导致同一时间特征尺度会分布在相邻的IMF中,即产生模态混叠现象。模态混叠现象会导致齿轮故障信息提取不充分,进而使齿轮的故障诊断达不到预期效果。
由于EMD易发生模态混叠,致使含有故障特征的一个分量可能被过分解成为多个IMF,但是峭度值较大分量由于过分解的相邻分量也会拥有较大的峭度值,即蕴含丰富的故障信息。所以我们可以根据分量的峭度值,结合IMF在频域上的分布,在第1步得到的有效分量的备选中选出峭度相似且频率若干个IMF并进行合成,作为新的有效分量。这样就能保证新的有效分量含有较多的故障信息,也是接下来的分析能够得到正确结果的基础。
2.2 信号分集合并
信号合并技术的合并方法主要有最大比合并、等增益合并、选择合并、切换合并、混合合并5种。等增益合并能够获得接近最大比合并的性能的同时极大地简化运算,成为了目前使用十分普遍的合并方法之一。本文使用等增益合并的方法对振动信号的有效分量进行合并。
1)等增益合并流程:
等增益合并的处理流程图如图1所示。
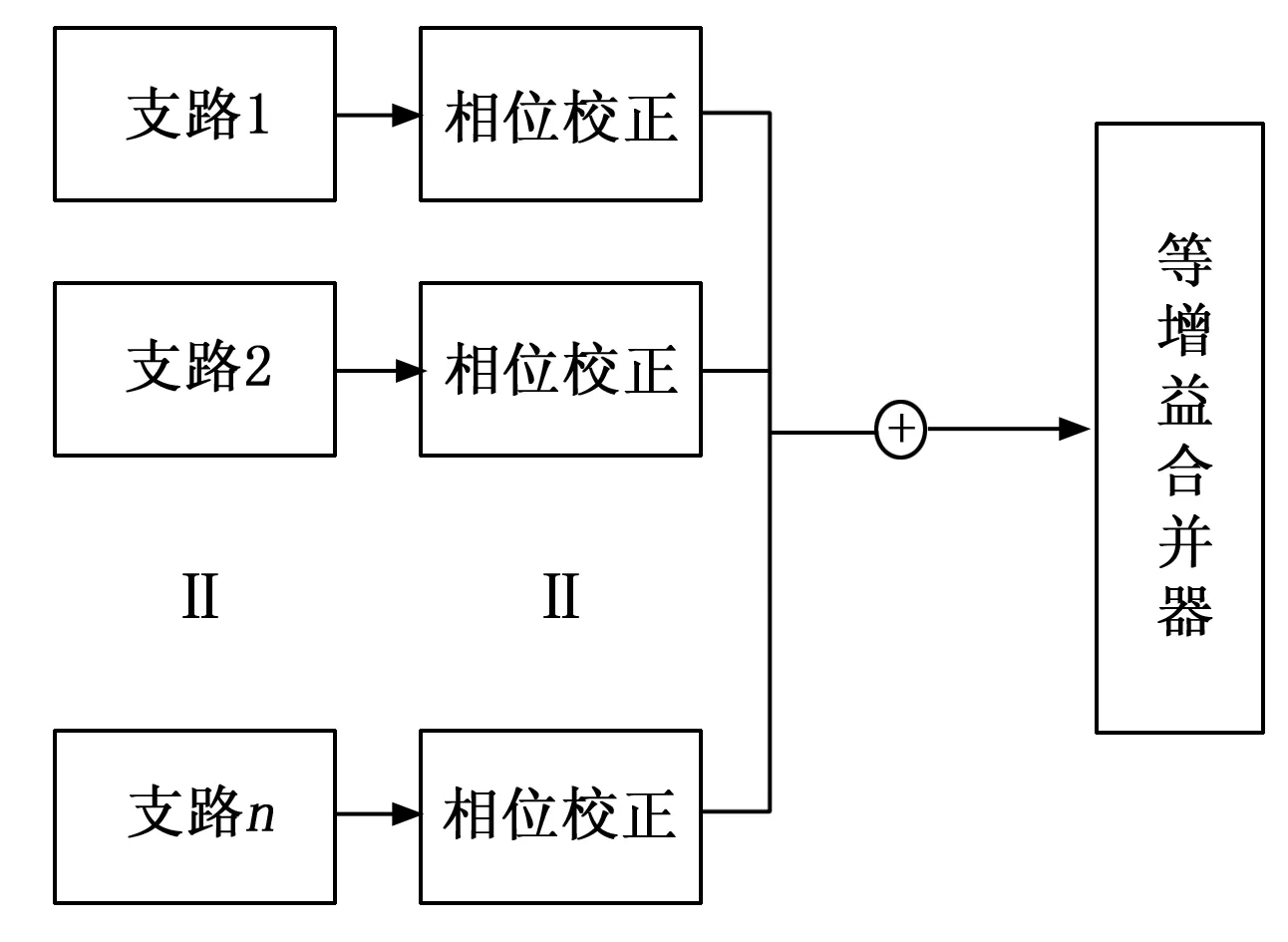
图1 等增益合并流程图
等增益合并只对信号包络进行相位校正,不进行幅度加权。若输入信号包络为αi,则其输出信号包络αout为[18]:
αout=∑αi
(9)
以两路信号为例,两路信号进行等增益合并后的信噪比为[19]:
(10)
其中:P1,P2表示两个分集支路的平均功率v1,v2表示支路的噪声功率,当P1=P2=P,v1=v2=v,即两个分集支路信噪比相等时,等增益合并后的总信噪比可表示为
(11)
可见,在分集支路信噪比相差不大的情况下,使用等增益合并对信号进行合并处理可以显著提高信噪比。应用在齿轮故障分析中,使用等增益合并对筛选合成得到的有效分量进行合并可以显著提高信号中故障信号的能量占比,对合成后的包络和信号展开频谱分析可以得到更为清晰的故障特征。
2)相位校正:
当两个相位不同的信号叠加时,由于相位差的存在,部分分量会相互抵消,导致能量减小,所以直接相加得到的和信号的能量可能会小于两个信号能量之和。为了提高和信号的信噪比,防止有用信息的能量受到损失,在进行包络相加之前需要对有效分量进行相位校正。本文采取基于广义互相关函数的相位校正方法。
以第一个有效分量x1(t)的相位为基准,计算其余有效分量xi(t)(i≠1)与x1(t)之间的相位差,再根据相位差对其他xi进行相位校正。
首先计算xi与x1之间的广义互相关函数:

(12)
式中,Gx1 xi(f)为第一个有效分量与其他有效分量的互功率谱。
(13)
Wx1 xi(f)为权重,这里取互功率谱模的倒数:
(14)
(15)

(16)
3 故障诊断流程
本文提出的基于信号EMD与分集合并的齿轮故障诊断流程框图如图2所示。
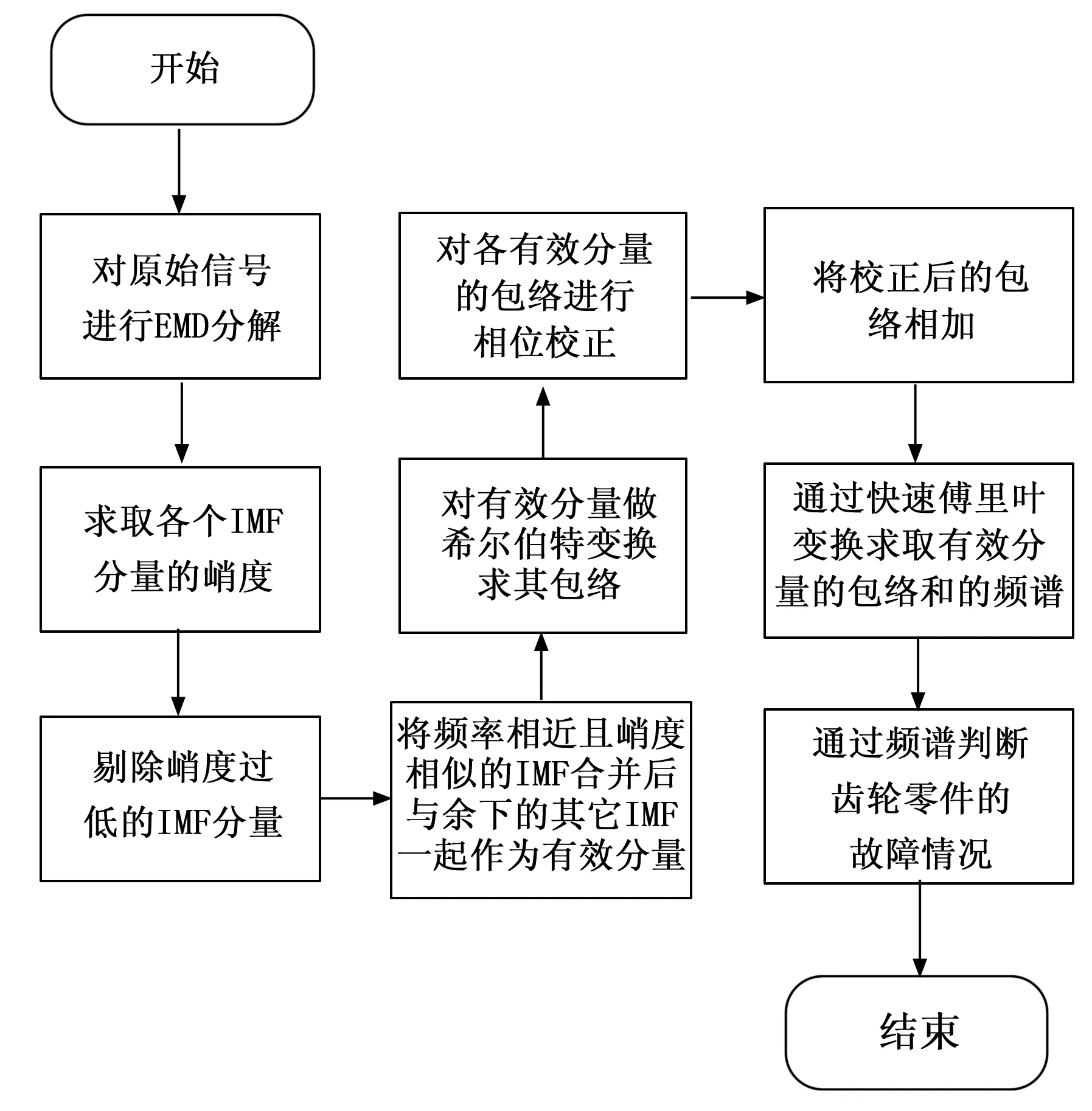
图2 齿轮故障诊断流程图
主要流程为:
1)使用EMD对齿轮振动信号进行分解,得到多个IMF。
2)求各个IMF的峭度,剔除峭度低于平均值的IMF。
3)将频率相近且峭度相似的IMF合并,与2)中留下的其它IMF一起作为有效分量。
4)利用希尔伯特变换对有效分量求包络。
5)对各有效分量的包络进行相位校正
6)将有效分量的包络相加,使用快速傅立叶变换求包络和的频谱。
7)观察频谱在齿轮转频及其倍频处是否存在明显的谱峰,进而判断齿轮的故障情况。
4 仿真数据分析
对如下仿真信号进行分析以验证本文方法的有效性。
x(t)=x1(t)+x2(t)
(17)
其中:x1(t)=8-500mod(t,1/20)sin(1 000 πt)为特征频率为20 Hz的周期性指数衰减的指数信号。x2(t)为高斯白噪声,信噪比为1。
采样频率为2 048 Hz,采样点数N=4 096,仿真信号的时域波形和包络谱如图3所示

图3 仿真信号的时域波形和包络谱
对信号进行EMD分解后得到9个IMF,其波形如图4所示(按频率从高到低排列)。

图4 EMD分解后的IMF波形
分别求出所得9个IMF分量的峭度,如表1所示:

表1 信号IMF分量峭度值
从表1中可以看出信号的IMF5、IMF6、IMF8、IMF9分量峭度值小于平均值(3.43),可以将其剔除,得到IMF1、IMF2、IMF3、IMF4、IMF7共5个有效分量,IMF2和IMF3两个有效分量频率相似且峭度相近,可将其合并成为一个有效分量。经过筛选与合并,总共得到4个有效分量。
计算有效分量之间的相关系数,如表2所示。
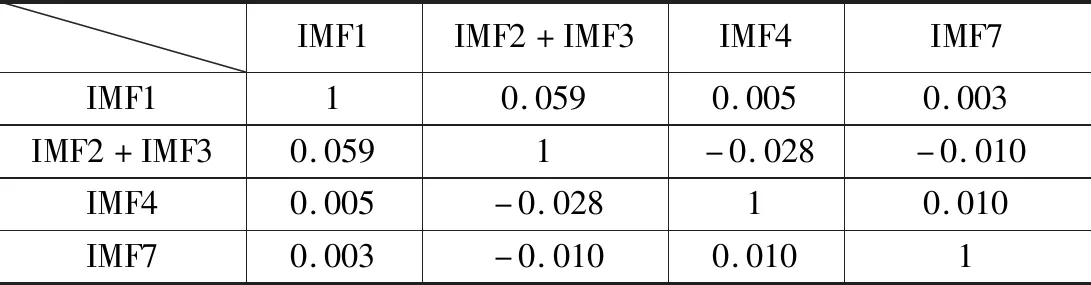
表2 各有效分量之间的相关系数
从表2中可以看出各有效分量之间的相关系数均在0.5以下,满足信号分集合并的条件。
在使用希尔伯特变换得到所有的有效分量的信号包络之和后再对其求和,并对和信号进行快速傅立叶变换求取瞬时频率谱如图5所示。
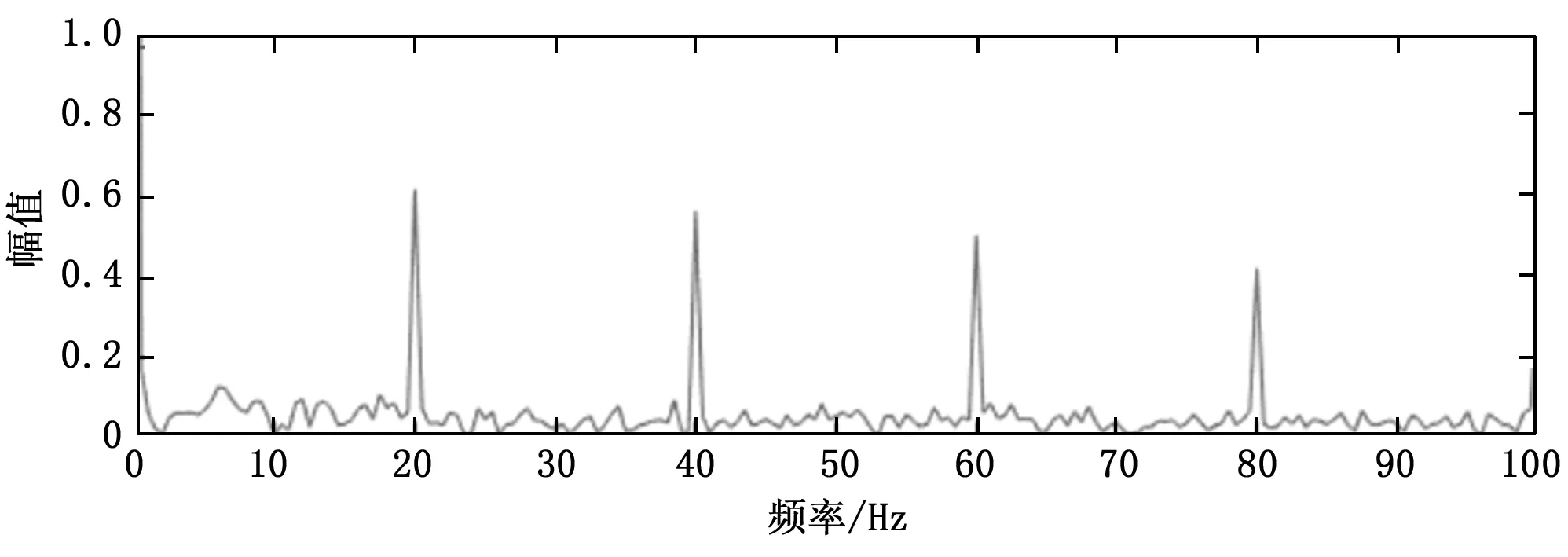
图5 和信号的包络谱
为了说明本文方法的有效性,图6画出了峭度最大的IMF1的包络谱。通过图6和图5与图3(b)进行对比可以发现,虽然直接展开包络分析和只对IMF1展开包络分析都可以获得20 Hz及其倍频处的谱峰,但是其20 Hz处的幅值都在0.4左右,而本文方法在20 Hz处的谱峰幅值在0.6以上,明显高于直接对仿真信号进行包络分析和选取最优信号进行包络分析的方法。

图6 IMF1的包络谱
按照如下公式分别计算3种方法得到的包络谱的信噪比。
(18)
其中:h(f)为包络谱,f0为有效信号的特征频率即20 Hz,n取正整数。计算得,直接进行包络分析得到的包络谱的信噪比为15.85 dB,IMF1的包络谱的信噪比为16.02 dB,而本文方法得到的包络谱的信噪比为18.43 dB,明显高于另外两种方法。由此可见本文方法占优。
5 试验数据分析
试验中的齿轮箱结构如图7所示,试验中所用齿轮2为从动轮,该齿轮存在一处断齿故障,主动齿轮和从动齿轮的齿数均为37。电机的转速n=720 r/min,主轴的转动频率fr=n/60=12 Hz,齿轮间的啮合频率fm=fr×37=444 Hz。振动信号由安装在从动轮轴承处的加速度传感器采集,信号的采样频率fs=2 048,采样数据点N=1 024。
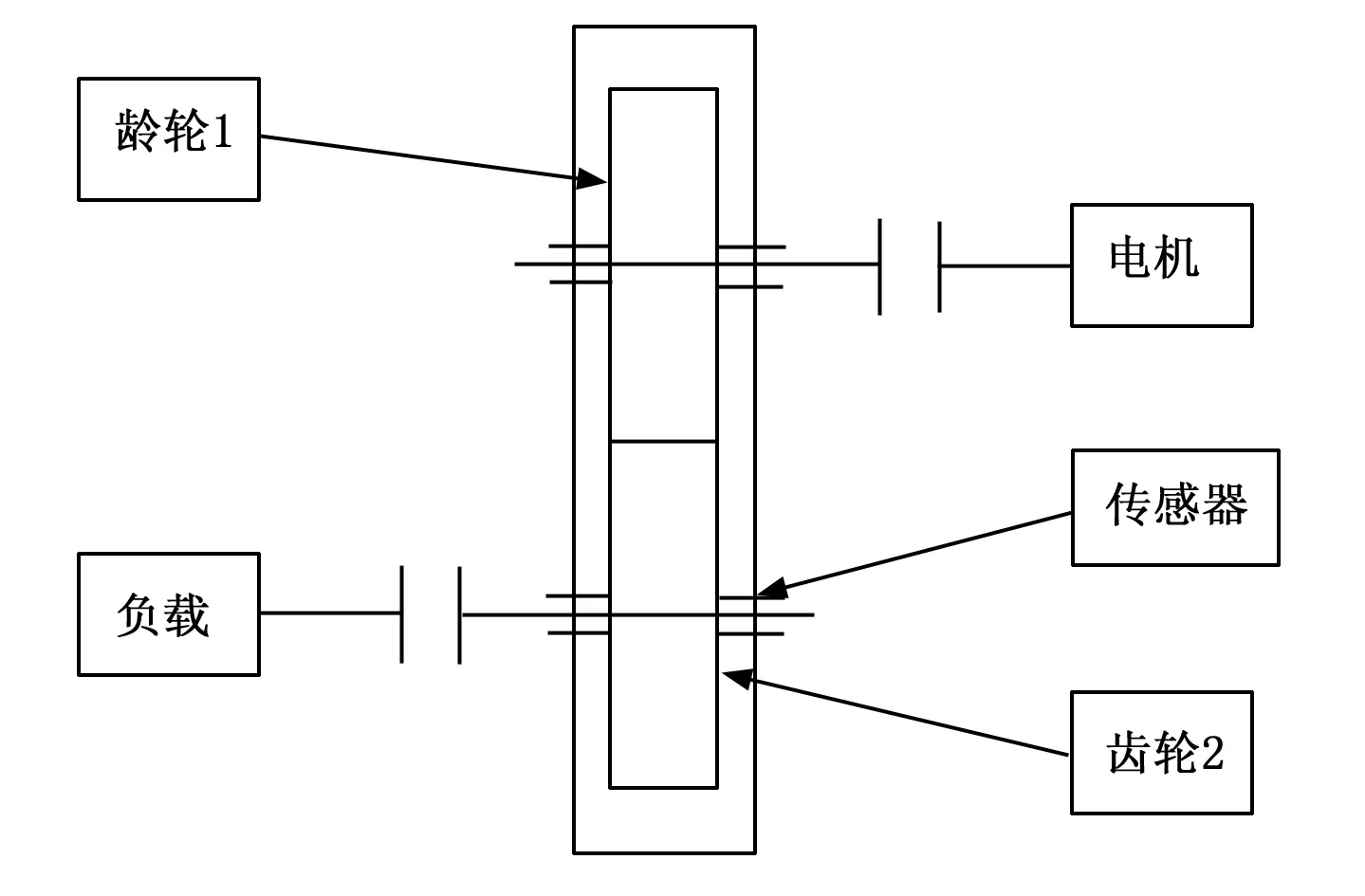
图7 齿轮箱传动结构
图8给出了齿轮振动信号的时域波形图、频域波形图(通过FFT方法求出)以及包络谱。从时域波形图中可以看出振动信号具有调幅-调频特性,但其周期性冲击不是特别明显;在频域波形中可以看到齿轮间的啮合频率444 Hz,以及被转频1倍频、2倍频调制的边频带432 Hz和456 Hz;包络谱中谱峰较为杂乱,无法展开有效分析。

图8 原始信号时域波形、频谱及包络谱
通过EMD方法将原始振动信号进行分解得到9个IMF分量。如图9所示,9个IMF分量所包含的频率段依次由高到低。

图9 EMD分解后的IMF波形
分别求出所得9个IMF分量的峭度,如表3所示。
从表中可以看出IMF1、IMF6、IMF8、IMF9分量峭度值小于峭度均值2.44,可以认为是无效分量从而将其剔除。在剩余的IMF2、IMF3、IMF4、IMF5、IMF7这5个有效分量中,IMF2和IMF3频率相近,峭度相似,将这两个分量加和作为新的有效分量进行分析。
求出有效信号之间的相关系数。如表4所示。

表4 各个有效分量之间相关系数
从表4中可以看出各有效分量之间的相关系数均在0.5以下,满足信号分集合并的条件。
对所有有效分量求包络之后相加,分析其和的频谱,如图10所示,为清晰展示低频特性,仅仅截取低频段(0~100 Hz)进行分析。图中可以清晰的看出转频12 Hz及其倍频的谱峰,由此可以判断齿轮出现了断齿故障。
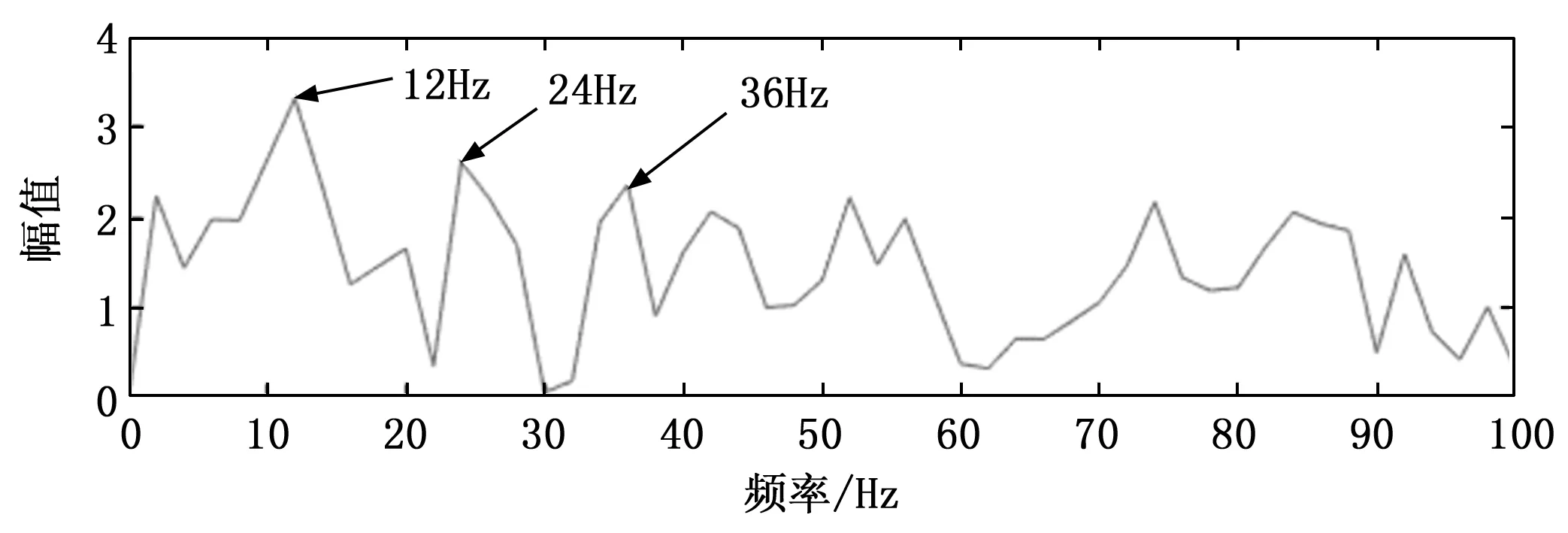
图10 有效分量包络和的频谱图
为了进一步说明本文方法的有效性,选取峭度最大的IMF7进行包络谱分析,如图11所示。从图中可以发现,谱峰出现在2 Hz的位置,而12 Hz位置并未出现谱峰。无法判定齿轮出现了断齿故障。由此可见,本文方法处理结果优于依据峭度准则选取单一IMF进行包络谱分析的方法。本文方法在实际齿轮故障诊断中是切实有效的。
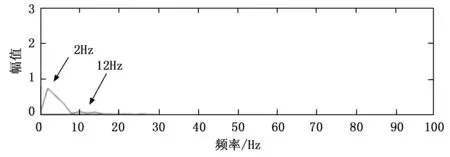
图11 IMF7的包络谱
6 结束语
本文结合经验模态分解(EMD)与信号分集合并技术,提出了一种新的齿轮故障诊断方法。对齿轮的振动信号,首先用EMD方法进行分解得到若干IMF,剔除峭度值较小的分量后依据剩余分量在频域的分布及峭度值情况来筛选合成有效分量,通过希尔伯特变换得到有效信号的包络,再通过等增益合并及傅立叶变换得到包络和的频谱,最后根据包络和的频谱进行齿轮故障诊断。通过对齿轮断齿故障振动信号的处理,验证了该方法的有效性。目前仍然需要进一步研究的问题有:
1)从EMD分解后得到的IMF中筛选合成有效分量的方法。
2)参与信号分集合成的IMF数量如何确定。
3)信号分集合成的具体方法。
猜你喜欢
机床与液压(2023年1期)2023-02-03 10:14:18
内燃机工程(2021年6期)2021-12-10 08:07:46
铁道机车车辆(2020年2期)2020-05-20 02:15:40
少儿科学周刊·少年版(2020年9期)2020-03-04 11:38:12
少儿科学周刊·少年版(2020年9期)2020-03-04 11:38:12
北京航空航天大学学报(2019年9期)2019-10-26 02:30:12
电子世界(2018年12期)2018-07-04 06:34:38
电子测试(2018年11期)2018-06-26 05:56:02
雷达学报(2017年3期)2018-01-19 02:01:27
制造技术与机床(2017年3期)2017-06-23 08:11:52