
基于MATLAB的直流电机PWM控制技术仿真研究
2021-09-28 07:52:00何沁园
江苏船舶 2021年4期
何沁园,庞 路
(中国船舶及海洋工程设计研究院,上海 200011)
0 引言
船舶综合电力系统是船舶领域的跨越式发展,但谐波的存在会对直流电机的运行及系统的稳定性产生冲击,导致振动、绝缘老化,使用寿命降低,甚至烧毁设备等问题。挪威·德国船级社(DNV·GL)规范中明确规定了电力系统电压波形正弦总畸变率应不超过8%,因此对于直流电力推进系统而言,采用合适有效的PWM控制技术对优化系统性能具有重要意义。PWM控制具有相等宽度的脉冲序列,可通过改变周期性脉冲序列实现调频,也可通过改变脉宽或占空比实现电压调节,在一定的调节范围内可实现电压与频率协调变化。
本文通过构建模拟直流电机模型对直流电机开环、闭环控制特性进行了阶跃响应仿真,并将PWM转速调制控制策略应用于实体模型电机的PWM控制电路设计中,从而有效支撑综合电力系统中直流电机PWM控制技术的应用。
1 模拟直流电机模型
直流电机排除负载影响后的开环特性理论模型为
(1)
式中:G
(s
)为直流电机开环特性;n
(s
)为电机转速,r/min;U
(s
)为电机电枢电压,V;T
是电磁时间常数,s;s
为静差率,用来衡量负载变化时转速的稳定度。本文设计的模拟直流电机在3、6、9、12、15 V这5种不同电枢电压下的运行特性曲线几乎平行,表现出了不同电枢电压下当电枢电流增加时转速会降低、相同电枢电流情况下电枢电压增大转速提升的情况。该模拟直流电机的开环特性曲线见图1,其开环特性基本呈线性关系,通过拟合确定电枢电压U
与电机转速n
的线性关系为n
=374U
-177(2)
式中:n
为电机平均转速,r/min;U
为电机电枢电压,V。
图1 电机开环特性曲线
通过检测模拟直流电机开环特性理论模型的一阶近似方程,可以测量模拟直流电机的时间常数T
=0.1 s和开环增益K
=374,模拟直流电机的开环特性理论模型可变换为
(3)
2 直流电机开闭环仿真分析
直流电机开环控制具有在给定输入信号后只存在单向作用而没有反馈联系的特点;相比于直流电机开环控制而言,闭环控制是指在直流电机控制中根据输入信号不断地反馈输出信号,并与输入信号进行比对反馈的一种控制方式。
根据构建的模拟式(3),设计该模拟直流电机的开环、闭环控制仿真模型分别见图2、图3,其中图3闭环控制仿真模型中PI控制器的转换模型为

(4)
式中:G
(s
)为直流电机闭环特性。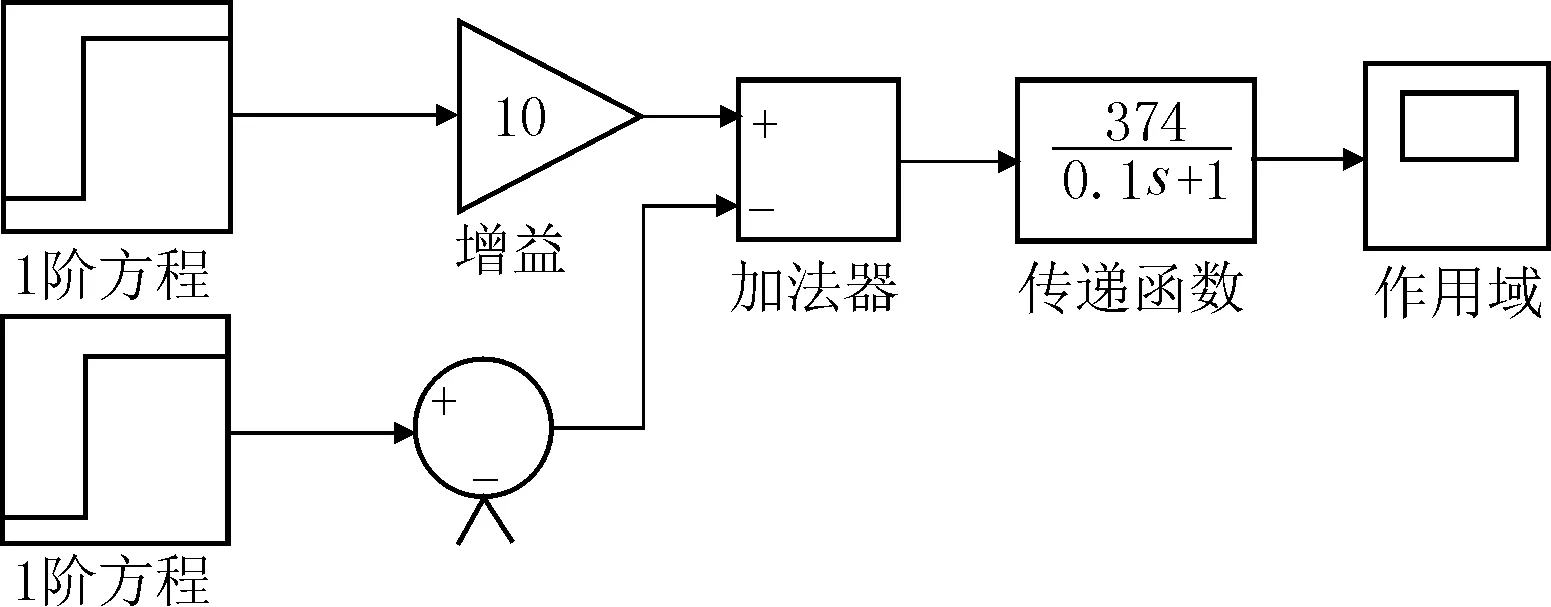
图2 模拟直流电机的开环控制仿真模型
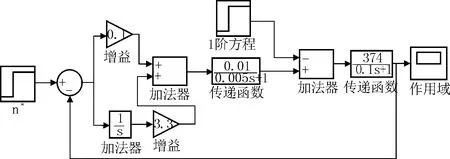
图3 模拟直流电机的闭环控制仿真模型
基于MATLAB软件对该直流电机模型分别开展开环控制、闭环控制仿真分析,其单位阶跃响应见图4。
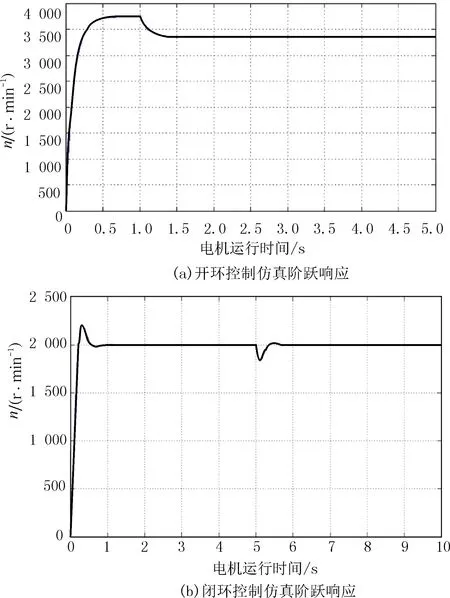
图4 模拟直流电机的仿真阶跃响应
从图4可以看出:
(1)开环控制电机输出转速无法达到阶跃指令速度,存在较大稳态误差。但闭环控制能够有效消除稳态误差,实现稳定输出转速与阶跃指令转速相同且稳态误差为零。
(2)开环控制电机响应速度略快于闭环控制电机响应速度,但开环控制电机响应速度无响应调整现象,闭环控制电机响应速度存在明显的响应调整现象。
(3)电机闭环控制过程中电机转速阶跃响应超调不大于10%,能够满足要求。
(4)电机开环控制过程中增加扰动后(如负载增加)电机响应速度无法自动恢复,完全不具有抗干扰能力;但电机闭环控制过程中增加扰动后电机输出转速能够在较短时间内恢复到指令值且没有稳态误差,具有较强的抗干扰能力。
因此,在直流电机控制系统中加入PI控制器不仅可以消除稳态误差,提高电机输出转速的抗干扰能力,而且可以提高控制系统的动态性能。
3 模型直流电机的PWM控制电路设计
3.1 直流电机PWM调速原理
直流电机PWM控制原理是在脉冲的作用下改变导通时间、关断时间进而实现对电机转速的控制,即通过改变电枢电压的占空比实现电机速度控制。其中:占空比D
是导通时间t
和调制周期T
的比率,即D
=t
/T
,电机平均转速n
一般与占空比D
近似为正比线性关系,占空比越大电机转速越快。直流电机PWM控制是通过控制MOSFET(Metal Semiconductor Field Effect)开关元件的开关时间来实现。MOSFET开关元件的栅极由电路获得的固定频率和可变宽度的方波驱动:当MOSFET开关处于“on”状态时,所有电源电压都施加在负载两端;当开关处于“off”状态时,负载两端的零电压通过改变所施加的方波脉冲宽度来控制 MOSFET开关元件的栅极。
3.2 直流电机PWM控制实验
通过将涡流制动器作为负载,本文设计实验直流电机在不同的电枢电压、电枢电流下的负载特性曲线见图5。
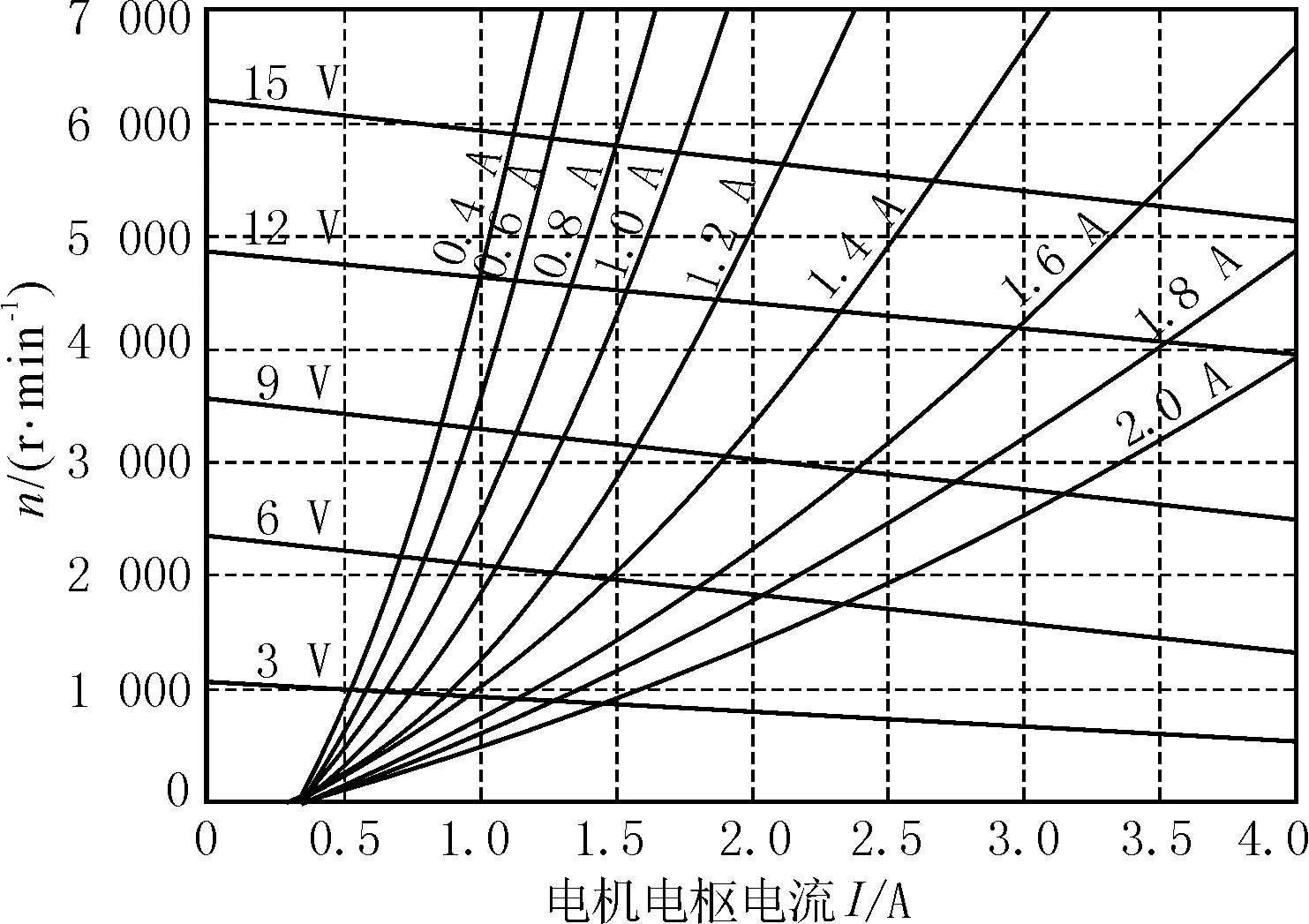
图5 实验直流电机稳定运行的特性图
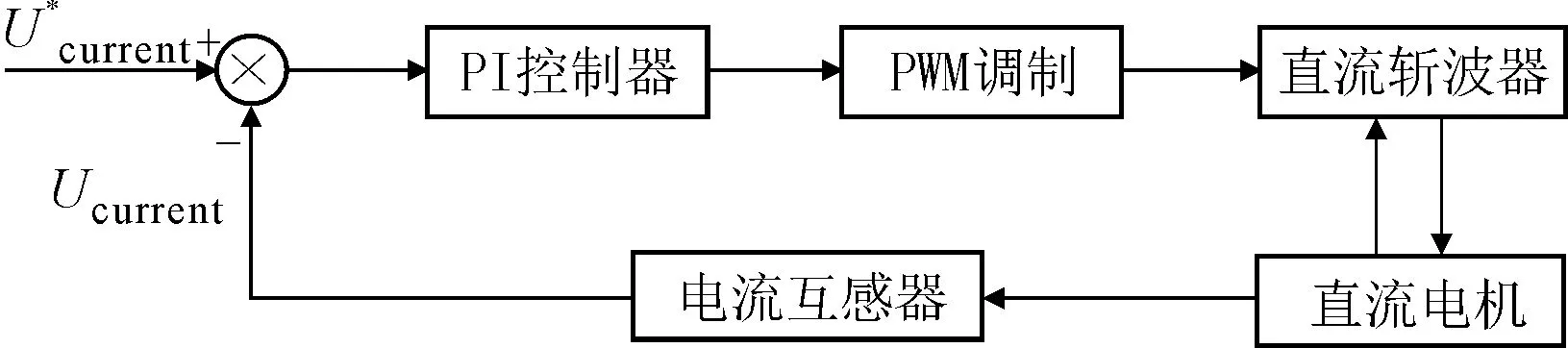
图6 实验直流电机闭环控制整个运行流程
4 结论
(1)基于MATLAB软件运用PWM控制方式实现转速调制,直流电机在开环控制系统中的机械特性较差,在相同的负载调节下电机速度明显下降。
(2)闭环控制中电枢电流相比开环系统曲线有明显改善,过渡时间大大缩短。
(3)将闭环PWM控制策略应用于实体模型电机的PWM控制的电路设计中,实现了直流电机PWM控制技术,可推广至船用领域。
猜你喜欢
电子设计工程(2022年15期)2022-08-17 10:07:16
火力与指挥控制(2022年5期)2022-07-25 03:50:10
弹箭与制导学报(2020年1期)2020-07-09 10:52:00
光通信研究(2020年2期)2020-06-15 07:42:58
弹箭与制导学报(2019年6期)2019-06-24 08:40:20
科技创新与应用(2019年17期)2019-06-09 08:38:29
电子测试(2018年1期)2018-04-18 11:52:24
合成化学(2015年4期)2016-01-17 09:01:04
海军航空大学学报(2015年1期)2015-11-11 17:22:41
电工电能新技术(2012年2期)2012-07-02 10:10:04
