自主定位机器人三角底盘的搭建及控制分析
2021-09-27 06:38蒋冬清李三雁
机械 2021年9期
蒋冬清,李三雁
自主定位机器人三角底盘的搭建及控制分析
蒋冬清,李三雁
(四川大学锦城学院,四川 成都 611731)
介绍了一款三角全向轮自主定位机器人底盘的搭建,包括全向轮型号的选择、动力系统的介绍以及机器人定位系统的选用,并完成了机器人底盘结构的设计与强度分析。此外还分析了机器人三角底盘的运动特性,给出在平移和旋转的工作情况下各全向轮的速度计算公式。完成了机器人运动的控制分析,给出控制流程。最后搭建了实物模型,实物模型运行平稳,能够实现运动过程中的底盘自转,运动位置精度在±20 mm以内,达到了预期目标,从而验证了设计的准确性。
三角全向轮;机器人;底盘;自主定位
随着工业自动化和自动化餐厅等设施不断普及,工业机器人和各行各业服务型机器人的研究都是当前的热点,这些机器人能够实现定点移动的关键技术在于机器人的底盘设计。机器人底盘有两个关键技术:①机器人的行走方式;②能提供实时位置和方位信息的定位技术。
目前比较常见的机器人行走形式有足式、轮式和履带式结构。考虑到机器人平衡等原因,一般工业和服务型机器人会选用轮式或者履带式移动结构;而对于服务或者轻工业辅助机器人,为了方便其转向和移动,一般会选用轮式结构。本文将对运动和转向十分灵活的三角全向轮底盘做详细介绍。
移动机器人常用的室内定位方式有无线定位技术(包括Wi-Fi、蓝牙、RFID、红外线、超宽带、ZigBee和超声波定位等)、视觉导航技术、激光导航技术、基塔定位等,在不同领域都有一定的运用,但这些方式要么定位精度不够,要么处理速度不够,或者价格较高。本次机器人底盘研究中,选用了性价比较高的基于编码器和陀螺仪的室内平面定位技术[1-3]。
通过对三角全向轮的自主定位机器人底盘搭建及控制分析研究,希望对后续室内移动机器人的研究和普及提供一定的参考。
1 三角底盘的结构搭建
1.1 全向轮及其动力系统
1.1.1 全向轮选型
全向轮一般包括轮毂和从动轮两个部分,在轮毂的外圆周处均匀开设有3个或3个以上的轮毂齿,每两个轮毂齿之间安装有一个从动轮,这些从动轮的径向方向与轮毂外圆周的切线方向垂直。全向轮能够灵活地向各个方向自由移动,不光能在轮毂切线方向运动,与切线垂直的部分也能以滚动摩擦的形式进行移动。几个轮子配合使用,可以实现底盘或者小车的各方位低摩擦运动。全向轮可以像一个正常的车轮或使用从动轮的辊侧向滚动,其胶辊提供了极大的灵活性[9],适用于大部分轮式的机器人、手推车、转移输送机、货运车、行李等。
全方位车轮性能完善,与传统车轮相比有较大优势。首先,全方位轮无需润滑,使用方便;其次,其现场维护和安装非常简单。
全向轮一般可分为单盘和双排两种类型。其中,单盘全方位轮的从动轮是单排的,而双排全方位轮的从动轮有两排,两排从动轮相互配合。相比于单排的全向轮,双排的全方向轮滚筒之间没有死区,且承载力更强,因此优先选择双排全向轮。
本次设计的全方位机器人的背景为机器人竞赛,对机器人进行了尺寸限制,因此选用成都航发公司的CL-13全向轮,其直径127 mm,宽度39 mm,中心孔径6 mm,承载能力50 kg。此全向轮采用橡胶材质的小轮和钢制镀锌轮毂,且每个从动小轮内使用了尼龙滑动轴承,使运行阻力更小,同时具有多种安转尺寸可选,性价比较高,能满足竞赛的精度要求[3]。
1.1.2 动力驱动系统
为达到控制精度要求,万向轮的动力提供选用了瑞士maxon公司的RE35直流伺服电机,其额定功率90 W,最大持续扭矩73.2 N·m。额定电压24 V,额定空载转数7670 rad/min,配有减速比14:1的行星减速箱,编码器为标配光电式的5线双通道输出编码器。
由于一般的室内机器人的尺寸及功率都会有所限制,因此制作过程中需选用体积小、控制精度高、信号传输稳定的驱动器,经过反复比较最终确定使用艾克申公司的Spinach直流伺服电机驱动器,参数如表1所示。
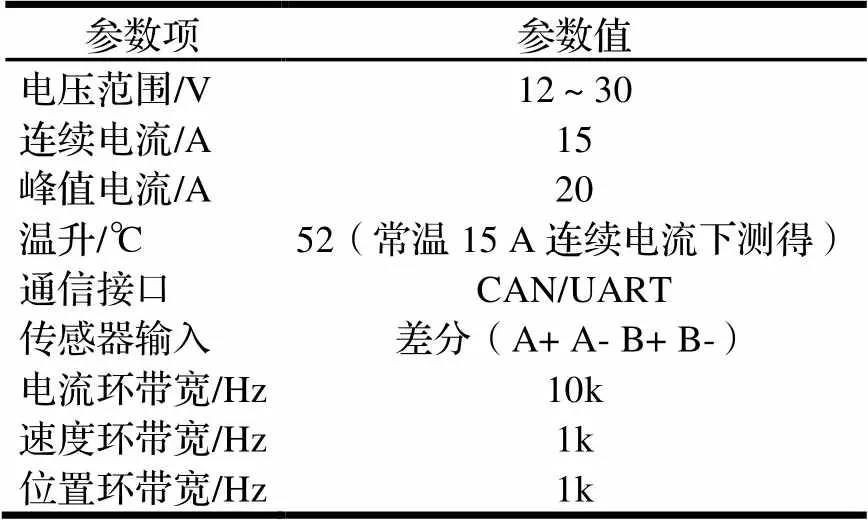
表1 直流伺服电机驱动器参数
驱动器第一次使用时需要进行电流环、速度环、位置环的PID参数调试与设置,这是非常重要的一个环节,需要详细观察被控电机的运转状态与上位机监控界面的数据图作对比,调试出最合适的PID参数进行设置。在设置时应该特别注意,三角底盘的每一个驱动器都应单独设置,其设定的各个环节的PID参数都有所不同,第一次设定好之后,后续就可以用控制器的程序直接对电机进行伺服控制。
1.1.3 控制处理器的选择
由于该机器人底盘设定为室内机器人,因此,首先,对于单片机工作环境没有过于苛刻的要求,其次,对于单片机的尺寸大小有限制要求,再者,由于要实时定位并进行校准,所以对于单片机的运算速度有较高要求。综合上述原因,选择了ARM类型的STM32单片机。
STM32单片机的型号有很多,基于该室内机器人底盘的设计需求,其需要满足I/O口较多、内存RAM适中、运算速度快等要求,最终选用STM32F103ZET6型号来完成该底盘的控制计算。
1.2 定位方式的选择
1.2.1 定位系统
本机器人底盘选用艾克申定位系统进行定位。这是一种专门用于移动机器人平面定位的位置传感系统,机器人通过该系统获取实时位置和角度信息,实现自主定位与导航。定位系统采用MEMS惯导技术与磁阻位移测量技术,通过集成互补滤波算法、卡尔曼滤波算法以及艾克申A-Fusion算法,保证机器人定位的可靠性与准确性[4-5]。该定位器通过高精度陀螺仪与正交编码器相结合,计算相对于初始位置(坐标为0, 0位置)的运动轨迹和坐标角度信息,通过简单的算法就可以得出移动单元时刻的坐标位置,广泛应用于各种室内机器人移动平台。该定位器的整体结构如图1所示,采用正交全向轮,小辊子内置轴承,阻力较小,可以测出任意方向的移动量,最大限度地减少打滑带来的影响,极大地提高了定位的精度与准确性。
1.2.2 定位系统的注意事项
室内定位系统属于高精度传感设备,安装位置的准确度与输出的角度、坐标信息紧密相关,如果实际安装位置与理论安装位置有偏差,会造成较大误差,所以制作过程中需严格按照以下建议安装。
(1)该定位系统具有广泛的适用性,可以安装在移动底盘的任何位置,然后通过公式将定位系统的坐标、角度等信息转换为整体的坐标、角度信息。为了保证更好的性能,优先推荐定位系统中心与移动物体几何中心重合,轴方向为移动底盘运动正方向;其次推荐定位系统中心在移动单元的旋转轴线上;当然也可以安装在底盘的任意位置,但安装位置与移动单元中心的相对距离和角度必须确定。

图1 定位器的外形结构
(2)该定位系统本身具有弹簧悬挂,这个悬挂可以保证编码器轮时刻与地面接触。弹簧悬挂的浮动距离为30 mm,安装面距离地面的高度应当控制在30~60 mm,为了达到最佳的浮动效果,建议安装面距离地面45 mm。
(3)螺钉仅作为设备连接使用,为了保证多次安装的一致性,建议在设备安装位置加上卡位设计。
(4)使用过程中远离振动源。
(5)保持水平安装。
1.3 机器人底盘结构搭建
一般室内地面比较平整,因此室内机器人底盘多采用轮式结构。轮式又分为四轮和三轮,为了使机器人运动和转向更加灵活,设计中采用了由伺服电机驱动万向轮带动的三轮底盘系统,其外形结构如图2所示,该底盘三个万向轮呈120°均匀分布,为了保护电机,电机与支撑板采用支撑架和电机轴套进行固定。
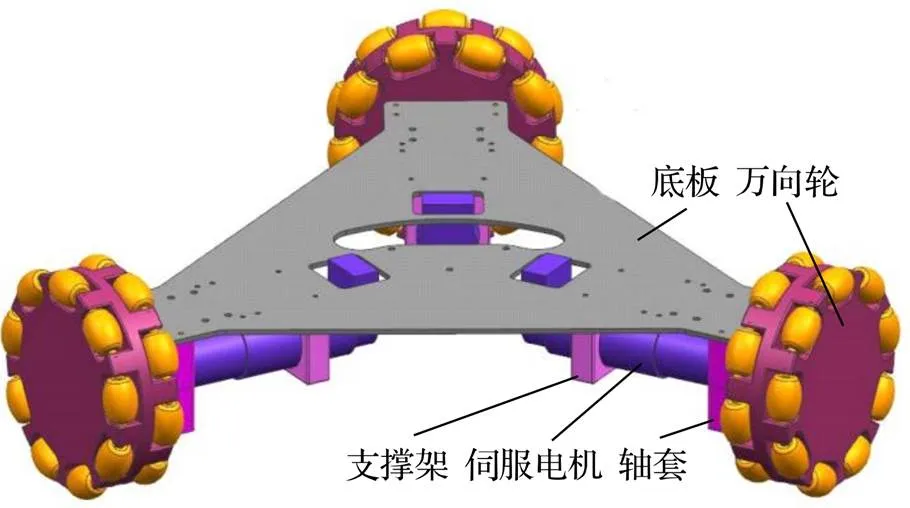
图2 三角底盘结构
底盘支撑上层机器人的重量,采用8 mm的铝合金板,根据实际承载情况添加边界和约束条件,在UG中进行有限元分析,得图3,最大变形量为3.104E-003,出现在图示1的位置,该变形量情况基本满足使用要求,与实际使用情况也吻合。
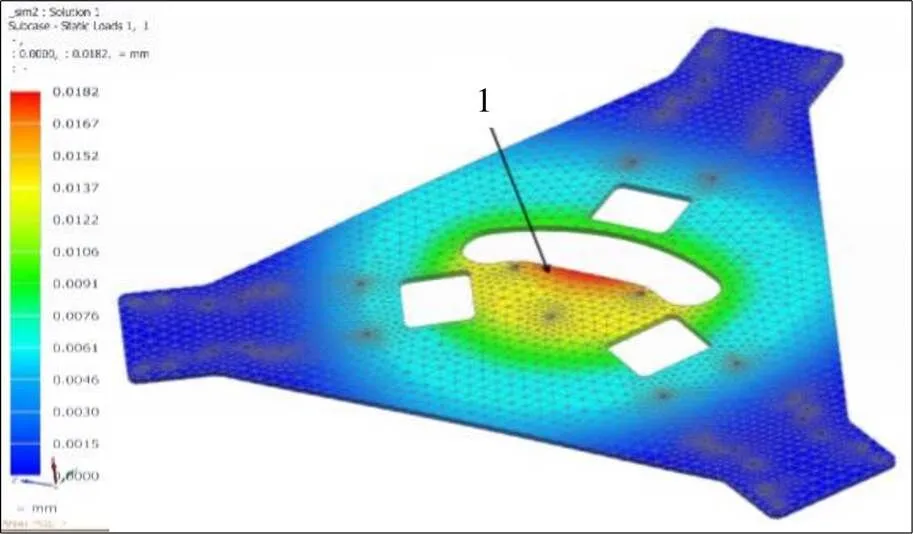
图3 底盘支撑板变形量分析
2 三角底盘的运动分析
2.1 三角全向轮底盘移动原理分析
三角全向轮机器人底盘运动是由3个全向轮的速度合成而来,全向轮底盘结构如图4所示,设定轮子旋转正方向为逆时针方向,机器人正向位置如图所示。
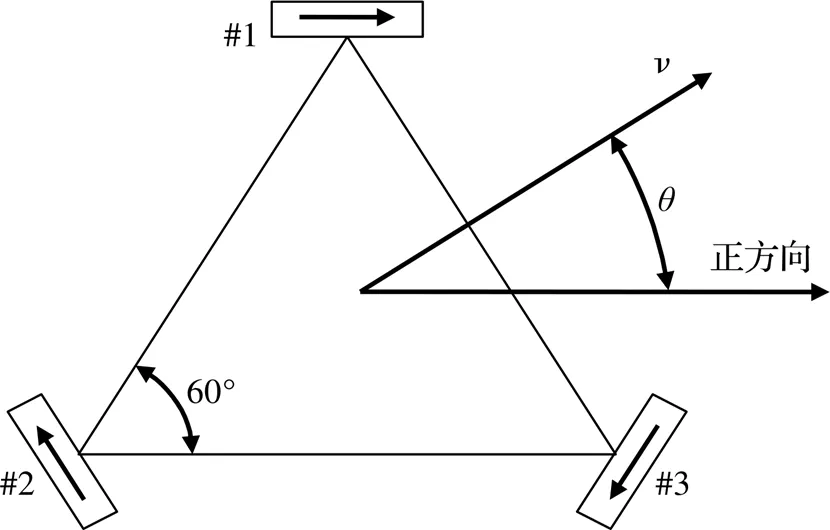
v为底盘的运动速度;θ为底盘运动方向和机器人正向间的夹角。
根据三角函数及速度合成可以得出,三角底盘平移时各轮速度为:
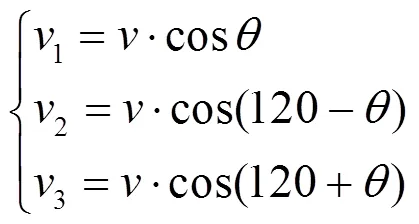
2.2 运动过程中机器人底盘旋转的运动分析
底盘在平动的同时绕任中心点旋转的运动和上述分析类似,只是引入一个姿态角(底盘的平移运动方向与世界坐标系轴的夹角),底盘旋转角速度为,此时有:

式(2)代入式(1),得到该三角全向轮机器人自主运动时三个全向轮的速度大小为:

式中:为全向轮的半径,mm。
根据机器人移动所需要的速度和旋转姿态的要求,按照式(3)就可以反推出每个全向轮的线速度。
2.3 各电机角速度的控制
伺服驱动器通过脉冲信号与电机编码器通讯,从而控制电机的转数以及加速度、位置。所以要对电机转数进行控制,则需要计算出电机旋转一圈所需的脉冲数。
编码器为500线,且使用AB两相输入信号,可以4倍频,电机是14:1的减速比,所以转动一圈所需脉冲数为:
=500×4×14=28000 (4)
也就是说电机转动一圈,需要伺服电机驱动器发出28000个脉冲。
由于轮子直径为127 mm,因此周长约为398.78 mm,所以约为70.2141532 脉冲/mm,则所需脉冲频率与线速度的关系为:
=×70.2141532 (5)
式中:为所需轮子线速度,mm/s;为所需脉冲频率,脉冲/s。
结合式(3)和式(5)就可以计算出每个驱动器所需脉冲频率,进而通过伺服电机驱动器控制电机的转动速度。
3 控制流程设计
3.1 控制要求
根据本三角底盘设计的背景,对控制部分提出以下要求:
(1)控制中心开机时,需要快速完成底盘各个单元的初始化设置,并且在初始化各个单元的同时,需要对未能正确初始化的单元进行报警,以便及时排查故障原因,减少机器人调试以及使用过程中排查故障原因的时间,提高工作效率。
(2)完成各个单元初试化设置之后,需要快速建立各个单元之间的通讯,并在等待定位系统初始定位完成后,使机器人能在短时间内进入工作状态。
(3)按下运行按钮或者发送了远程启动命令后,机器人底盘需要通过定位系统传回的位置坐标以及自身角度,不断调整自己的运行状态,按照既定策略准确运行。
(4)在靠近设定目的地时,需配合红外传感器进行辅助定位,减小在移动过程中产生的累积误差,使机器人能准确抓取或放置目标物,并需要判断是否还有下一个运动计划,以及判断底盘是否可开始下一次运动计划的移动。
(5)在调试机器人底盘时,需要实时返回定位系统位置和角度参数以及规划出的路径点数据到手机端或者电脑端并显示,以便快速查找问题和分析、优化控制程序。
3.2 控制流程设计
根据设计要求,该移动机器人的控制流程共分为以下六部分:
(1)控制开始时对各单元初始化,并判断初试化是否正常,若不正常则进行报警。
(2)完成初始化后,解读总的运行计划并自动规划当前路径点,等待运行按钮信号。
(3)接到开始运行信号后,机器人开始运动,并以每10 ms一次的频率读取定位系统的角度、坐标数据,并根据设定计算已移动的位移,通过蓝牙模块将位置和角度数据发送至远程监控的手机端或者电脑端。
(4)控制机根据实施传回的位置数据与最初规划路径点的差值进行PID运算,计算并控制底盘各轮的速度,以此实现精准位置控制。当机器人移动到距离目标点50 cm位置时,开启触碰传感器和红外传感器检测,进行辅助定位,实现精确定位[7]。
(5)到达预定位置时底盘控制单元发送信号给机器人上层控制单元,执行目标物的抓取或者放置,并根据初始设定判断是否还有下一个运动规划,若有,则按照第一步的设定装载计划、规划路径,并等待上层控制单元给出动作完成信号以便执行下一步的运动计划。
(6)如果等待上层信号时间超过7 s则强制认为已收到信号,开始下一步的动作,以免在机器人动作过程中因为碰撞而导致信号故障、程序卡死等问题。
根据以上分析给出图5。
4 验证与结论
在以上分析的基础上,根据四川省大学机器人大赛熊猫乐园主题赛的相关要求,添加了部分上部构架,在自主定位三角底盘的基础上搭建了一个具有搬运功能的室内机器人,如图6所示,该机器人能够根据预设程序,在没有人为干预的情况下,完成定点抓取指定地标,且放置于指定位置,在控制精度和运动速度上都达到了较好的效果。
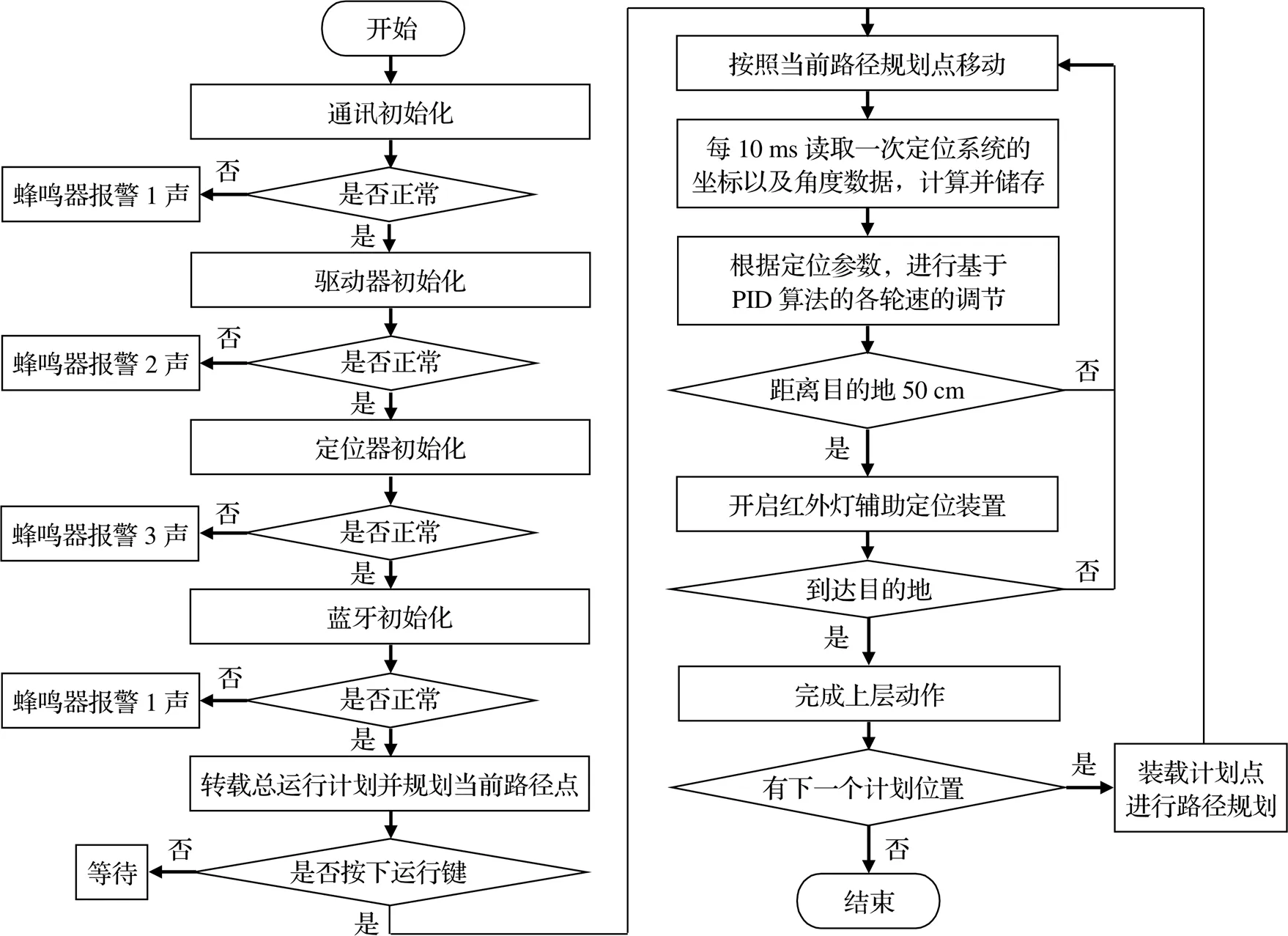
图5 控制流程框图

图6 三角全向轮的自主定位机器人实物模型
在机器人实物制作的过程中应当特别注意,由于三角全向轮底盘需要搭载机器人上层结构进行移动,因此有较大的负载施加在底盘上,在组装时需要注意装配的间隙,安装过程中要尽量使电机支撑结构能够最大程度地减小电机轴压力,否则如果电机轴在长期变形的情况下进行运转,会大大降低电机的精度,从而影响机器人定位的准确性。其次,在安装时,必须反复确认定位系统的中心点与三角全向轮底盘的中心完全重合,这样做的主要目的是减小因为装配而造成的定位误差。最后,电机以及驱动器的电源线应尽量远离定位系统的数据传输线(建议用一定方式固定在较为边缘的位置),以免强电流干扰信号的传输,造成数据错误而导致较大的定位误差。
三角全向轮的自主定位机器人能在实验场地中按照既定计划平稳准确运动和定点停止,并且能够顺利完成抓取或者放置目标物,定位精度在±20 mm之间,达到了设计预期。通过本次基于三角全向轮的自主定位机器人底盘搭建及控制分析,可以看到三轮机器人的运动灵活性及方向和速度的可控性,为室内场所的机器人运动规划提供了一定的参考。
[1]周旭龙,赵言正,杨玥旻. 室内移动机器人自主定位导航系统设计[J]. 中国民航大学学报,2020,38,208(5):58-62.
[2]吴鹏,李东京,贠超. 一种惯性传感器与编码器相结合的AGV航迹推算系统[J]. 机电工程,2018,35(3):310-316.
[3]易文泉,赵超俊,刘莹. 移动机器人自主定位与导航技术研究[J]. 中国工程机械学报,2020,18(5):28-33.
[4]李文学,饶运清,戚得众,等. 全向轮机器人路径规划与导航系统设计[J]. 机械设计与制造,2014(12):18-22.
[5]熊家新,刘丽,徐鹤,等.全向轮式移动机器人的定位导航算法[J]. 长春理工大学学报:自然科学版,2014,31(2):32-36.
[6]Abd Rabbou M,El-Rabbany A. Tightly coupled integration of GPS precise point positioning and MEMS-based inertial systems[J]. GPS Solutions,2015,19(4):601-609.
[7]刘勇,吕艳辉,白云裳. 三轮全向轮机器人底盘控制与分析[J]. 中国新通信,2019,21(16):143.
[8]李清然,齐军. 室内清扫机器人路径规划方法研究[J]. 计算机科学与应用,2016,6(6):333-339.
[9]张学玲,侍才洪,康少华,等. Mecanum万向轮滚子外轮廓曲面变形补偿设计[J]. 中国工程机械学报,2014,12(3):213-217.
[10]张磊,蒋刚,肖志峰,等. MEMS陀螺与编码器在机器人自主定位中的应用[J]. 机械设计与制造,2011(9):142-144.
[11]温安邦. 基于激光测距仪的室内机器人定位方法研究[D]. 武汉:武汉科技大学,2009.
[12]罗娜,朱江,李燕. 基于智能PID的直流电机控制算法仿真分析[J]. 红外技术,2020,42(3):218-222.
Construction and Control Analysis of Triangle Chassis for Autonomous Positioning Robot
JIANG Dongqing,LI Sanyan
( Jincheng College of Sichuan University, Chengdu 611731, China )
This paper mainly introduces the construction of a triangle omnidirectional wheel autonomous positioning robot chassis. It includes the selection of omni-directional wheel, the introduction of power system and the selection of robot positioning system, and complete the design and strength analysis of the robot chassis structure. The motion characteristics of the triangle chassis are analyzed, and the speed calculation method of each omni-directional wheel in the case of translation and rotation is given. The control analysis of robot motion is completed, and the control flow is given. Finally, a physical model is built, it runs smoothly and can realize the chassis rotation in the process of movement. The accuracy of motion position is within ±20 mm, The expected goal is achieved, which verifies the accuracy of the design.
triangle omnidirectional wheel;robot;chassis;autonomous positioning
TP242
A
10.3969/j.issn.1006-0316.2021.09.009
1006-0316 (2021) 09-0060-07
2021-02-05
四川大学锦城学院校级课题重点项目:室内移动智能定位系统的研究(2019jcky0036)
蒋冬清(1984-),女,广西桂林人,工学硕士,副教授,主要研究方向为机械电子工程、机械结构、智能机器人等,E-mail:250529913@qq.com。
猜你喜欢
航天制造技术(2022年4期)2022-09-30
防爆电机(2021年3期)2021-07-21
防爆电机(2021年3期)2021-07-21
现代信息科技(2021年21期)2021-05-07
防爆电机(2021年1期)2021-03-29
家庭影院技术(2020年8期)2020-09-11
福建质量管理(2019年18期)2019-10-14
能源(2016年2期)2016-12-01
学习月刊(2016年19期)2016-07-11
专用汽车(2016年4期)2016-03-01