基于机器视觉的接触轨几何参数测量方法
2021-09-27 06:30熊厚旺陈建政
机械 2021年9期
熊厚旺,陈建政
基于机器视觉的接触轨几何参数测量方法
熊厚旺,陈建政
(西南交通大学 牵引动力国家重点实验室,四川 成都 610031)
针对现有地铁接触轨几何参数测量方法存在误差大、效率低的问题,提出一种基于机器视觉的接触轨几何参数测量方法。该方法结合双目视觉和结构光技术,通过将结构光投射到接触轨表面,得到结构光光条图像,提取光条中心线并与另一台相机的光条图像中心线匹配,得到光条中心在实际空间位置的信息,最后在中心线中提取测量位置特征点,以特征点坐标信息反映接触轨几何参数。以上述测量原理为基础设计了接触轨几何参数测量仪,并在试验中进行精度测试。试验结果表明,该测量仪在不同的距离下,测量精度能达到1 mm,同时具备良好的测量稳定性,能够满足实际现场的测量要求。
线结构光;机器视觉;接触轨
接触轨是沿着地铁走行轨布置并供给列车电能的特殊输电系统,电动车组通过伸出的集电靴与之接触而接受电能。接触轨几何参数(即相对走行轨及轨道平面的空间几何距离)的正常对于地铁牵引供电系统至关重要,一旦接触轨相关部件发生机械故障或几何参数超限,不仅影响集电靴正常取流,还会造成运营车辆无法正常运行,甚至发生安全事故。目前国内多采用测量尺这种接触式方法对接触轨几何参数进行测量[1]。随着地铁线路里程的增长,这种误差大、效率低的测量方式会大大增加工作人员的劳动强度、影响地铁线路的正常运维。
随着计算机和图像技术的高速发展,人们试图用摄像机获取图像环境并将其转化为数字信号,并用计算机对视觉信息进行处理,实现对目标的识别和信息提取,也就是机器视觉。随着机器视觉系统的不断完善,机器视觉技术已具有高度的智能性和普遍的适应性,已完全能用于工业现场,满足现代生产过程的需要[2]。
余凌波[3]利用单目视觉技术和工业机器人完成了对鞋面的稠密三维重建,李民等[4]提出了一种基于机器视觉的黑晶面板几何参数测量方法,实现了比人工检测更好的测量效果。
本文基于机器视觉技术提出一种使用双目相机结合结构光技术的非接触式测量方法,用于提高对接触轨几何参数的测量精度与效率。
1 基本原理
1.1 测量对象
如图1所示,相关技术要求[5]指出,需要定期对接触轨的拉出值3和导高4进行测量,由于外侧的防护罩与接触轨通过卡爪和螺栓一同固定在绝缘支架上,接触轨的几何参数变化同样会造成防护罩的位置变动,因此也需确定防护罩顶点相对走行轨的高度1和侧边拉出值2,来验证接触轨是否在设计位置范围内,本文方法将以两组不同对象的几何参数检验接触轨位置是否正确。

图1 接触轨几何参数示意图
1.2 测量原理
双目视觉测量技术是一种基于视差的三角测量方法,通过空间点在两幅图像中的视差及三角关系来恢复物体的三维信息[6],如图2所示,如果得到点在两摄像机成像位置及两摄像机空间关系,便能求得点在空间中的三维坐标信息。
假设点在外界空间坐标系下的坐标为(x,y,z),在左右相机成像平面中的成像坐标分别为(u,v)和(u,v),则摄像机的成像模型可以表示为:

式中:M和M分别为左右摄像机的透视投影矩阵,表示空间点与图像点之间的空间映射关系;s和s为比例因子。
联立式(1)和式(2)得式(3):
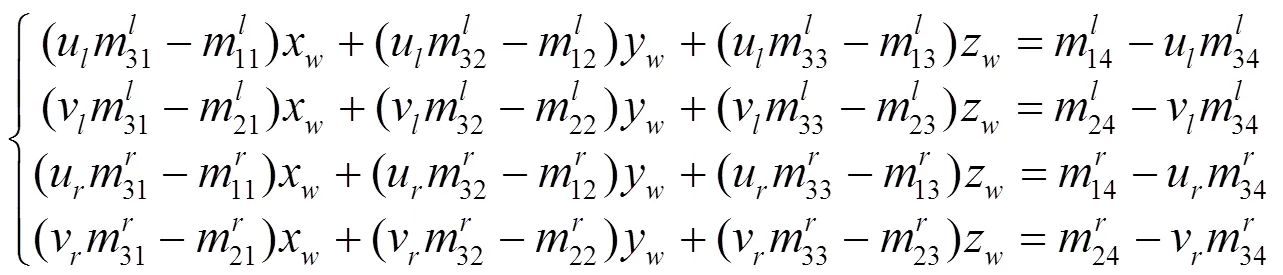
式(3)为关于x、y、z的4个线性方程组,通过最小二乘法可求得点在外界空间中的三维坐标。

fl、fr分别为左右摄像机的焦距。
基于线结构光的检测是目前最为常见的主动视觉测量方法,将线结构光照射在物体表面,线结构光由于表面深度的变化而受到调制,表现在图像中则是光条发生了畸变,畸变的程度与深度成正比,因此从畸变的光条图像中可获取物体表面的三维信息。
根据线结构光的特点,借助线结构光发射器向轨面投射线结构光,提取结构光成像光条的特征中心线,通过式(3)得到中心线在预先设定的轨道基准坐标系中的坐标位置,并在中心线中提取几何参数测量位置的特征点,以该点的坐标值表示接触轨的几何参数。
根据上述测量原理,本文接触轨几何参数测量方法主要流程如图3所示。

图3 接触轨几何参数测量方法流程
2 接触轨几何参数测量方法
2.1 图像背景噪声处理
拍摄图像中不仅包含有光条,还包括背景中的被测物。由于研究主体为光条,所以需要先消除被测物的干扰,也就是需消除背景噪声,本文采用的方法为大津阈值法[7]。
大津阈值法通过设置一个灰度阈值t,将图像像素分为两类1、2,若存在一个t使图像灰度类间方差2最大,就能将图像差别最大的两部分(即前景和后景)分离。类间方法的表达式为:

式中:1、2为两类像素的灰度均值;为图像平均灰度;1、2为像素点被分为1和2类的概率。
以该方法进行去噪实验。先对图4(a)所示摄像机拍摄的结构光图像进行灰度处理,得到图4(b),再对灰度图像进行大津阈值法处理,得到图4(c)。可以看到,光条主体部分得到了很好的保留。
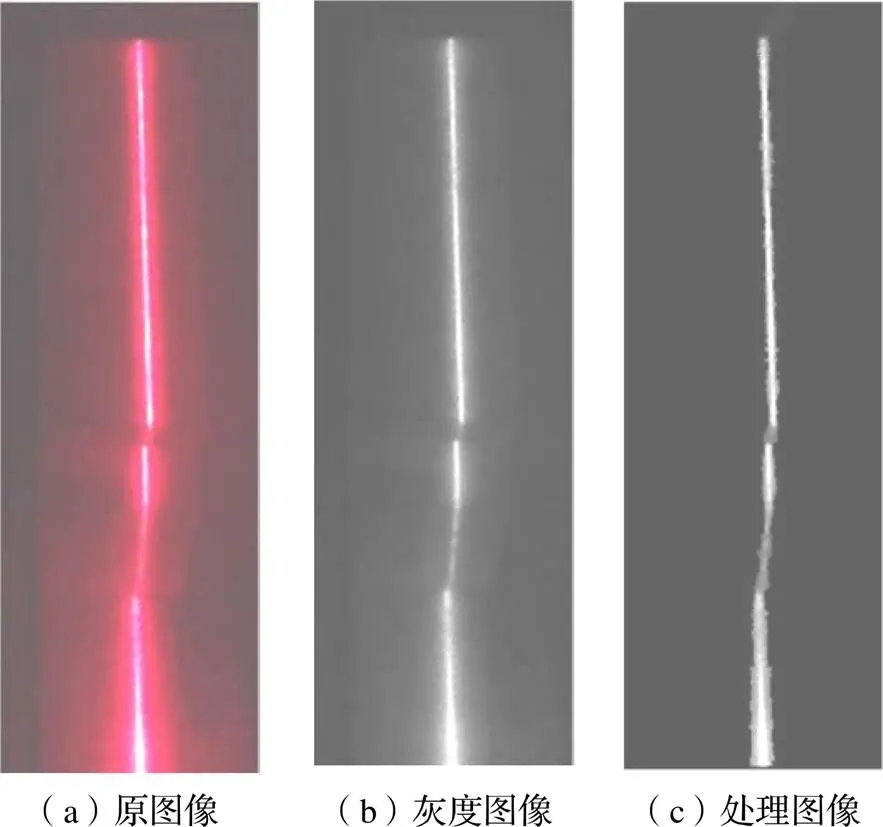
图4 大津阈值法处理效果
2.2 结构光中心线的提取
结构光中心线的提取采用基于Hessian矩阵的Steger算法[8],该算法主要是通过求解Hessian矩阵得到图像光条的法线方向。在光条图像中Hessian矩阵表示为:

式中:g(,)为二维高斯函数;(,)为以图像点(,)为中心,大小与高斯卷积模板相等的图像矩阵;r、r和r表示各卷积结果。
图像中点的法线方向由该点Hessian矩阵最大特征值的绝对值对应的特征向量表示,在法线方向求极值点便能得到光条中心的亚像素坐标。
Steger算法具有精度高、稳定好的特点,但运算量大,严重影响中心线的提取效率和系统实时性。本文在原方法的基础上进行改进,通过引入光条骨架,实现对光条中心区域的定位,如图5所示。假设在光条中虚线为实际中心线,中间细黑线为骨架,改进思路为优先对骨架及其附近的点进行中心点的求取,这能够避免光条边缘点参与算法运算,从而减小原算法的计算量。

图5 引入骨架的改进方法示意图
利用传统算法和改进算法提取4组光条中心线所耗费时间的比较,以及各光条像素点在算法中的运算次数如表1所示。可以发现,引入骨架后4组光条中心提取效率出现不同程度的提升,其中光条3和4由于光条像素点多,改进算法避免了对大量边缘点的运算,使得效率提升幅度更明显。

表1 两种算法提取四幅图像中心线所耗费的时间及四种光条像素点参与运算的次数
图6为利用Steger改进算法对光条图像中心线的提取效果,所得中心线保留有接触轨轨面的位置信息。

图6 光条中心线提取效果
2.3 图像中心线匹配
本文采用的是双目视觉成像系统,所以还需对左右两幅光条图像的中心线特征点进行匹配[9]。本文采用surf算法快速实现特征点的匹配。该算法通过构造高斯金字塔尺度空间,利用非极大值抑制确定特征点,再统计特征点领域内的harr小波特性选取特征点主方向,并得到surf特征点描述算子,最后通过构造匹配器匹配两幅图像描述算子从而实现特征点匹配。
左右摄像机同一时刻拍摄的光条特征点匹配效果如图7所示,图中两侧为同一光条对象,中间的线段为左右两图对应匹配点的连线,为便于展示只显示了部分匹配点连线,可以看到,两个光条对应位置匹配准确,说明surf算法能实现良好的匹配效果。

图7 光条中心特征点匹配效果
2.4 几何参数特征点提取
左右图像特征点匹配完成后,将匹配的两个特征点代入式(3)。式(3)指定的外界基准坐标系为轨道坐标系,该坐标系以靠近接触轨方位的走行轨轨顶中间点为原点、走行轨前进方向为轴,在图1水平和垂直方向分别建立轴和轴。
图8为匹配点集经过式(3)转换后在平面坐标系的坐标位置,图中上部为防护罩廓形,下部为接触轨轨头部分廓形。从图中可以看出,2和4值测量位置包含有较多能反映所在位置接触轨几何参数的特征点,可通过切片统计的方法[10]求取2和4;由于1和3值测量位置特征点数量较少,特征点的提取较困难,需通过建立约束连线的方法获取能反映实际几何参数的特征点。
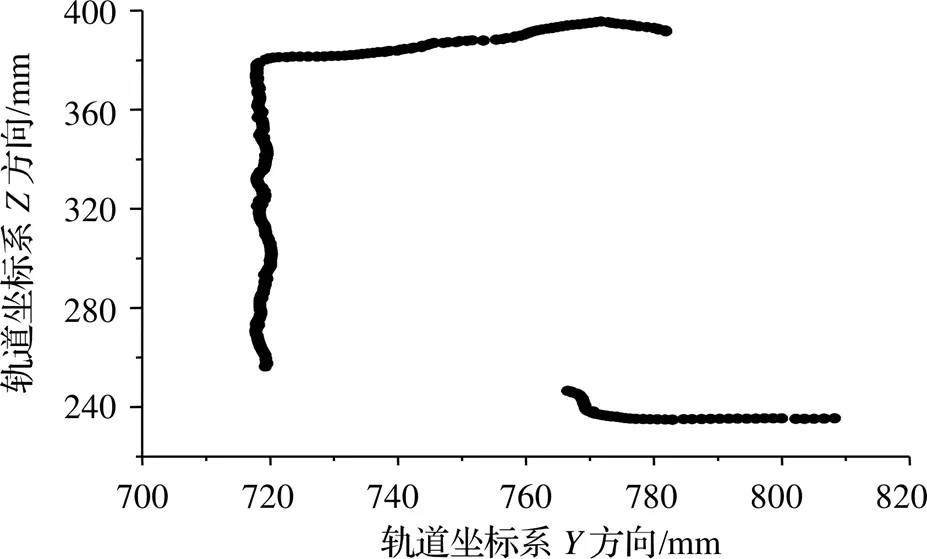
图8 光条中心线在轨道平面坐标位置
2.4.1 基于约束统计的特征提取法
以1 mm为单位进行切片,对防护罩特征点集和接触轨特征点集分别进行垂直和水平方向的切片数据采集,统计落在整数集合相应区间的元素个数,提取其中元素数量最多的区间,以该区间中特征点的特征坐标平均值作为几何参数输出。
从图9可以看出,切片提取法将特征区域的点和其他区域的非特征点明显区分开,通过提取元素个数最多的区间集合,便能得到2和4的值。
2.4.2 建立约束连线的特征点提取法
以接触轨拉出值3测量位置为例,该区域的局部放大图如图10所示,特征点提取方法具体步骤如下:
(1)参考标准接触轨廓形及标准廓形在轨道坐标系下的标准坐标位置,在实际测量位置左右各选取一个点作为约束点;
(2)在中心线所在的坐标系图像中,以这两点的坐标建立一条约束连线12;
(3)通过设置合适的阈值,采集到线段12距离小于阈值的点,如图中的1到2组成的点集;
(4)利用最小二乘法求这些点的拟合线,以该拟合线和12的交点作为该测量位置的几何特征点。
通过以上述步骤便能精准提取3测量位置几何特征点,再以该特征点的坐标值来表示3值,对于1测量位置几何参数特征点的提取同理。

图9 防护罩和接触轨数据集切片统计结果

图10 A3测量位置约束连线示意图
3 检测系统实现
根据上述方法设计的接触轨几何参数测量仪如图11所示,主要分为上位机和下位机两部分,上位机内置微型工控机,能够控制相机进行图像采集,实现上述处理过程,并在显示器中显示测量结果。下位机内置单片机控制板,以UART协议实现与上位机的通讯,并以控制按钮为指令起点发送指令至上位机,执行相机拍照、数据保存等操作,集成的水平校准模块能够发射“十”字形激光,用于对准预设的校准点,实现装置整体水平。

图11 测量仪各组成部分示意图
测量前只需将装置整体架设在轨道上,利用水平校准模块调整装置至水平状态,并通过下位机底部扣件将装置整体固定于轨道,以此状态进行接触轨几何参数的测量。
4 试验验证与分析
4.1 系统标定
基于机器视觉的测量系统中,建立图像中特征点与该点实际空间位置的对应关系的过程称为标定。本文采用的标定方法为,利用摄像机拍摄棋盘格标定板图像,获取棋盘格角点在图像中和在轨道坐标系中的坐标,并根据已知的相机参数建立对应关系。在标定过程中实现轨道坐标系的建立。经过标定后,1和4能以各自几何参数特征点的坐标直接表示,2和3则以各自几何参数特征点的值再加轨头宽与轨距和的一半来表示。
4.2 精度验证试验
试验以高精度接触轨模型为测量对象,在专用滑动台上利用测量仪对不同水平和垂直距离下的接触轨模型进行几何参数测量,测量精度要求为1 mm。
以广州地铁接触轨几何参数设计值为初始量,设置步长为5 mm,对初始位置水平和垂直方向±30 mm的范围进行1~4值测量,验证系统精度,其中水平方向测量结果如表2所示。
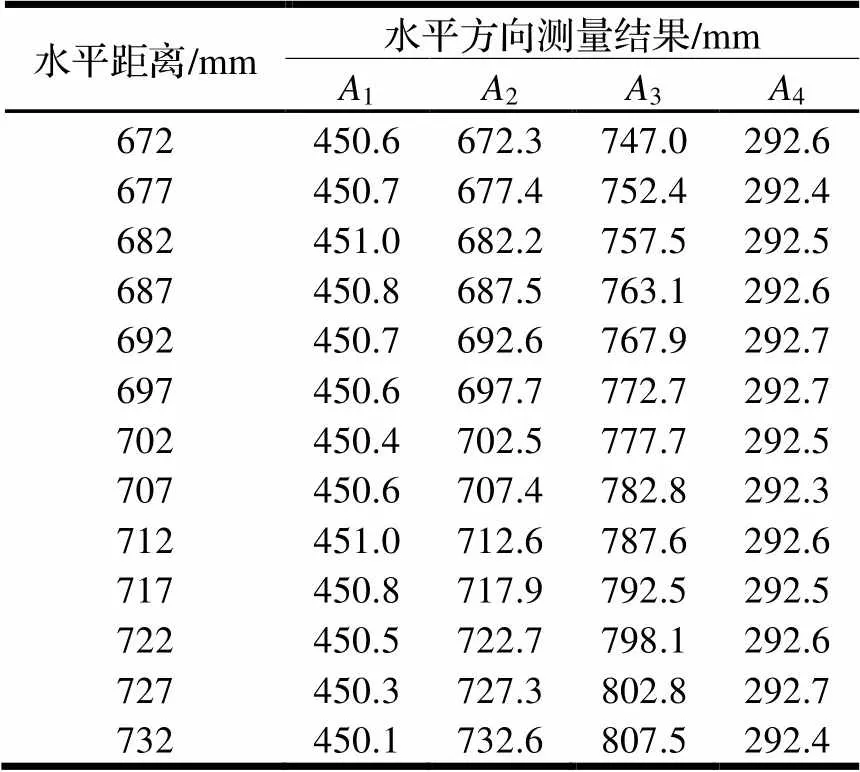
表2 水平方向测量结果
从表2可看出,在水平方向变化与走行轨之间的距离时,防护罩拉出值2与接触轨拉出值3发生明显变化,每次变化都在5±1 mm范围内,而防护罩顶点高度1和接触轨导高4变化并不大,只在原距离±1 mm范围内变动。
为更直观地展示该检测系统的精度等级,表3列出了两个工况下1~4各自的均方差。可以看到1~4均方差都小于0.3,说明测量系统在不同距离、不同测量位置都能达到较高的精度等级,1和3的均方差大于2和4的主要原因是测量位置特征点少,建立约束连线的特征点提取法的拟合曲线与实际廓形线存在差别,导致测量精度稍差。
此外,还对系统的测量稳定性进行了分析,在重复进行10次相同环境下的测量试验后,得到图12。
由图12可知,无论是水平方向还是垂直方向,同一几何参数测量位置在不同距离下的10次测量结果均方差都小于0.2,且不同距离之间的均方差波动幅度较小,具有良好的稳定性。
综合试验数据结果,该检测系统的测量功能具有较高的精度及稳定性,能满足测量需求。

表3 试验测量结果均方差
5 结论
本文针对现有接触轨几何参数测量方法存在测量误差大、效率低的问题,提出一种基于结构光双目视觉技术的测量方法,并设计出接触轨几何参数测量仪。该方法首先拍摄结构光在接触轨轨面成像图,对图像进行去噪处理得到光条主体,通过Steger改进算法实现光条中心线的快速提取,再利用特征点匹配算法对左右相机光条图像中心线进行特征匹配,建立轨道基准坐标系,得到中心线在该坐标系的坐标信息,最后通过不同提取方法提取几何参数测量位置的特征点,以其特征坐标值表示接触轨几何参数。
根据上述方法实现对接触轨几何参数测量仪的设计和搭建,并用于精度验证试验,试验结果表明,在不同距离下,测量结果与实际值差值均在规定要求的1 mm精度范围内,同时具有较高的稳定性。这套测量仪实现了对接触轨几何参数高精度、智能化的测量,对地铁接触轨检修保养工作有着重要意义。

图12 不同方向各测量位置10次测量结果均方差值
[1]顾世平,樊戈平,熊斌. 北京地铁第三轨高低、水平距离检测系统[J]. 铁道建筑,1997(5):9-12.
[2]张广军. 机器视觉[M]. 北京:科学出版社,2008.
[3]余凌波. 基于线结构光的单目3D视觉机器人制鞋喷胶技术研究[D]. 武汉:华中科技大学,2019.
[4]李民,周亚同,张忠伟,等. 基于机器视觉的黑晶面板几何参数测量方法[J]. 仪表技术与传感器,2020(5):102-106.
[5]中华人民共和国住房和城乡建设部,中华人民共和国国家质量监督检验检疫总局. 城市轨道交通技术规范:GB 50490-2009[S]. 北京:中国建筑工业出版社,2009.
[6]Longuet-Higgins H C. A computer algorithm for reconstructing a scene from two projections[J]. Readings in Computer Vision,1987,293(5828):61-62.
[7]OSTU N. A threshold selection method from gray-level histogram[J]. IEEE Transaction on Systems Man and Cybernetics,2007,9(01):62-66.
[8]STEGER C. An unbiased detector of curvilinear structures[J]. IEEE Trans on Pattern Analysis & Machine Intelligence,1998,20(2):113-125.
[9]陈坤煌,樊留群,杨永. 基于图像识别的端拾器吸盘安装的研究及应用[J]. 机械,2020,47(5):60-66.
[10]舒丛丛,陈建政. 切片统计的轮廓识别方法在轨检技术中的应用[J]. 无线互联科技,2015(7):144-146.
Measurement Method of Contact Rail Geometric Parameters Based on Machine Vision
XIONG Houwang,CHEN Jianzheng
( State Key Laboratory of Traction Power, Southwest Jiaotong University, Chengdu 610031, China )
Aiming at the problems of large errors and low efficiency in the existing methods of measuring geometric parameters of subway contact rails, a method based on machine vision for measuring geometric parameters of contact rails was proposed. The method based on binocular vision and structured light technology, by using a structured light projected onto the rail surface, obtain structure light article images and to extract the center line of the light stripe and the other cameras in light of the center line of the image matching, the light article center location information in real space, and finally in the center line of feature points extraction measurement position, with a characteristic point coordinates information reflecting the contact rail geometric parameters. Based on the above principle, a contact rail geometric parameter measuring instrument is designed and its accuracy is tested in the experiment. The experimental results show that the measurement accuracy of the instrument can reach 1mm at different distances, and it has good measurement stability, which can meet the actual on-site measurement requirements.
linear structured light;machine vision;contact rail
TP751.1
A
10.3969/j.issn.1006-0316.2021.09.003
1006-0316 (2021) 09-0013-08
2021-03-17
科技部常规性科技援助项目(KY201701001)
熊厚旺(1996-),男,江西奉新人,硕士研究生,主要研究方向为机车车辆故障诊断与安全监测,E-mail:houwangx96@163.com;陈建政(1968-),男,四川遂宁人,博士,研究员、硕导,主要研究方向为机车车辆动态检测技术与数据处理。
猜你喜欢
中学生数理化·中考版(2022年9期)2022-10-25
水电站机电技术(2022年4期)2022-04-18
疯狂英语·新策略(2019年10期)2019-12-13
当代陕西(2019年10期)2019-06-03
数学小灵通·3-4年级(2017年9期)2017-10-13
电测与仪表(2016年16期)2016-04-12
北京信息科技大学学报(自然科学版)(2016年5期)2016-02-27
中外医疗(2015年5期)2016-01-04
印制电路信息(2015年6期)2015-12-30
浙江理工大学学报(自然科学版)(2015年5期)2015-03-01