带恒功率负载Buck变换器的模型预测控制
2021-09-26 14:16:16陶彩霞王伟斌祝曦高锋阳王冉冉杨乔礼
湖南大学学报·自然科学版 2021年8期
关键词:模型预测控制
陶彩霞 王伟斌 祝曦 高锋阳 王冉冉 杨乔礼

摘 要:针对含恒功率负载(Constant Power Load,CPL)的Buck DC-DC变换器稳定性和负荷不确定性问题,提出一种含高阶滑模观测器的模型预测(Model Predictive Control,MPC)控制策略. 首先,根据MPC理论,构建Buck变换器的目标函数,建立滚动优化跟踪方程并求解最优控制律. 其次,构建高阶滑模观测器,提高电压的控制精度并消除抖振及相对阶问题. 最后,对其进行小扰动的稳定性分析,建立源、负载侧的等效模型. 在CPL与阻性负载投切较为频繁时,与传统双闭环PI调节和MPC控制进行比较,仿真结果表明:在负载变化时,基于高阶滑模观测器的MPC控制具有良好的动态性和鲁棒性且能对母线电压进行精确跟踪与控制.
关键词:Buck变换器;恒功率负载;模型预测控制;高阶滑模观测器;小信号分析
中图分类号:TM46 文献标志码:A
A Model Predictive Control for
Buck Converter with Constant Power Load
TAO Caixia1,WANG Weibin1,ZHU Xi2,GAO Fengyang1,WANG Ranran1,YANG Qiaoli1
(1. College of Automation and Electrical Engineering,Lanzhou Jiaotong University,Lanzhou 730070,China;
2. Equipment Technology Center of National Railway Administration,Beijing 100891,China)
Abstract:To solve the problems of stability and load uncertainty of Buck DC-DC converters with constant power load (CPL),a model predictive control(MPC) strategy with high-order sliding mode observers is proposed. Firstly,the objective function of the Buck converter is constructed according to MPC theory,and the rolling optimization tracking equation is established to solve the optimal control rate. Secondly,a high-order sliding mode observer is constructed to improve the voltage control accuracy and eliminate chattering and the relative order problem. Finally,the stability analysis of small disturbance is carried out to establish the equivalent model of source and load side. When CPL and resistive load are switched frequently,the simulation results show that the MPC control based on high-order sliding mode observer has good dynamics and robustness,compared with the traditional double closed-loop PI adjustment and MPC control. In addition,it can control and track the bus voltage when the load changes.
Key words:Buck converter;constant power load;model predictive control;high-order sliding mode observer;small signal analysis
直流微电网作为交直流混合配电网中不可或缺的组成部分[1]. 随着源端和负载端直流设备不同程度的增加,其系统稳定性分析对于电网的安全运行不可忽视. 与交流微电网相比,直流微电网控制结构简洁、网损低、运行灵活度高,因無须考虑频率、相位以及无功补偿等优势而备受学者关注[2]. 电力电子变换器作为分布式电源和负载的接口时,闭环控制可等效为具有负阻抗特性的CPL[3-4]. 当大量CPL经DC-DC变换器接入母线时,降低系统阻尼,造成微电网不稳定. 为补偿CPL的负阻尼问题,通过增加电阻、电容等器件增加系统阻尼. 文献[5]通过增加电容、电阻或设计LC滤波器来增加系统的无源阻尼进而提高其稳定性. 该方法受物理条件限制,增加了变换器的重量、成本与功率损失.
线性控制对非线性负载时,一般难以实现超调小和稳定时间短等平滑瞬态最优性能. 近年来,有关CPL的Buck变换器引起的系统稳定性问题已有诸多研究[6]. 随着对滑模控制不断研究逐渐形成将滑模控制与其他控制相结合的方法,能达到良好的控制效果且弥补不同方法间的不足[7].
文献[8]提出了一种含固定开关频率的滑模占空比的Buck控制器,使CPL在较宽频率的工作范围内稳定的方法,但需要测量电容电流,从而产生较大串联等效电阻且降低滤波器的纹波效果. 文献[9-10]采用小信号建模并运用下垂控制与滑模控制方法构建非线性观测器,能较好地满足非线性系统全局稳定性的要求. 文献[11-12]针对 Buck 变换器的阻抗非匹配问题,分别建立了传统与扩张扰动观测器,对其进行在线观测和补偿,提升了系统的瞬态效应,但引入了较多待设参数,增加了计算难度.
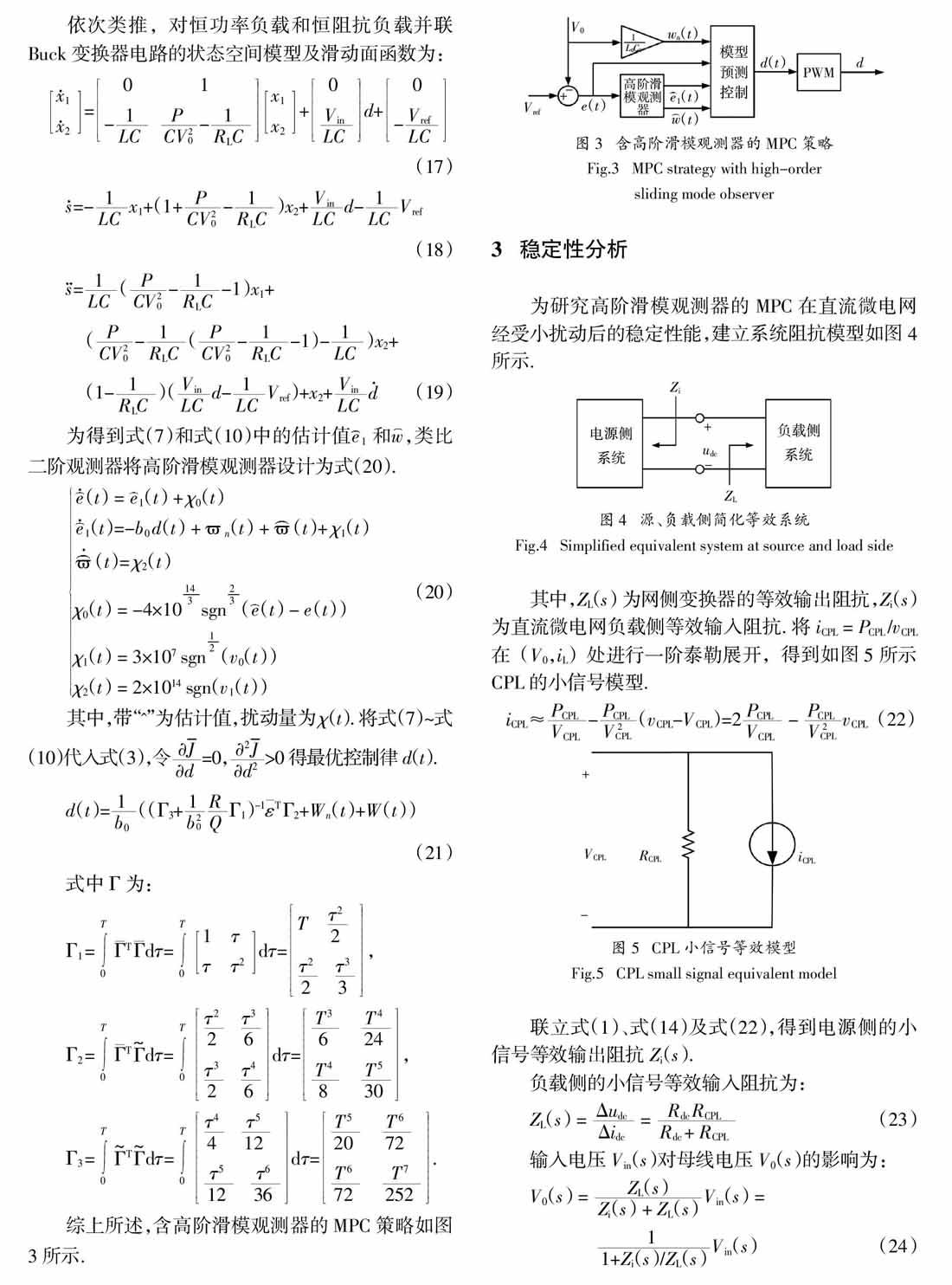
针对含CPL的Buck DC-DC变换器稳定性和负荷不确定性问题,提出一种新型含滑模观测器的模型预测控制策略(Model Predictive Control,MPC). 首先,利用MPC理论建立Buck变换器的目标函数及最优电压跟踪滚动优化方程,并预测跟踪误差. 其次,在负荷投切较为频繁时,研究系统稳定性及Buck变换器在不同负载扰动下系统的稳定性. 最后,将所提控制策略与双闭环PI调节和MPC策略相比,验证了含高阶滑模观测器的MPC的可行性与有效性,分析表明利用该控制策略对提高系统母线电压的瞬态性能效果明显.
1 直流微电网
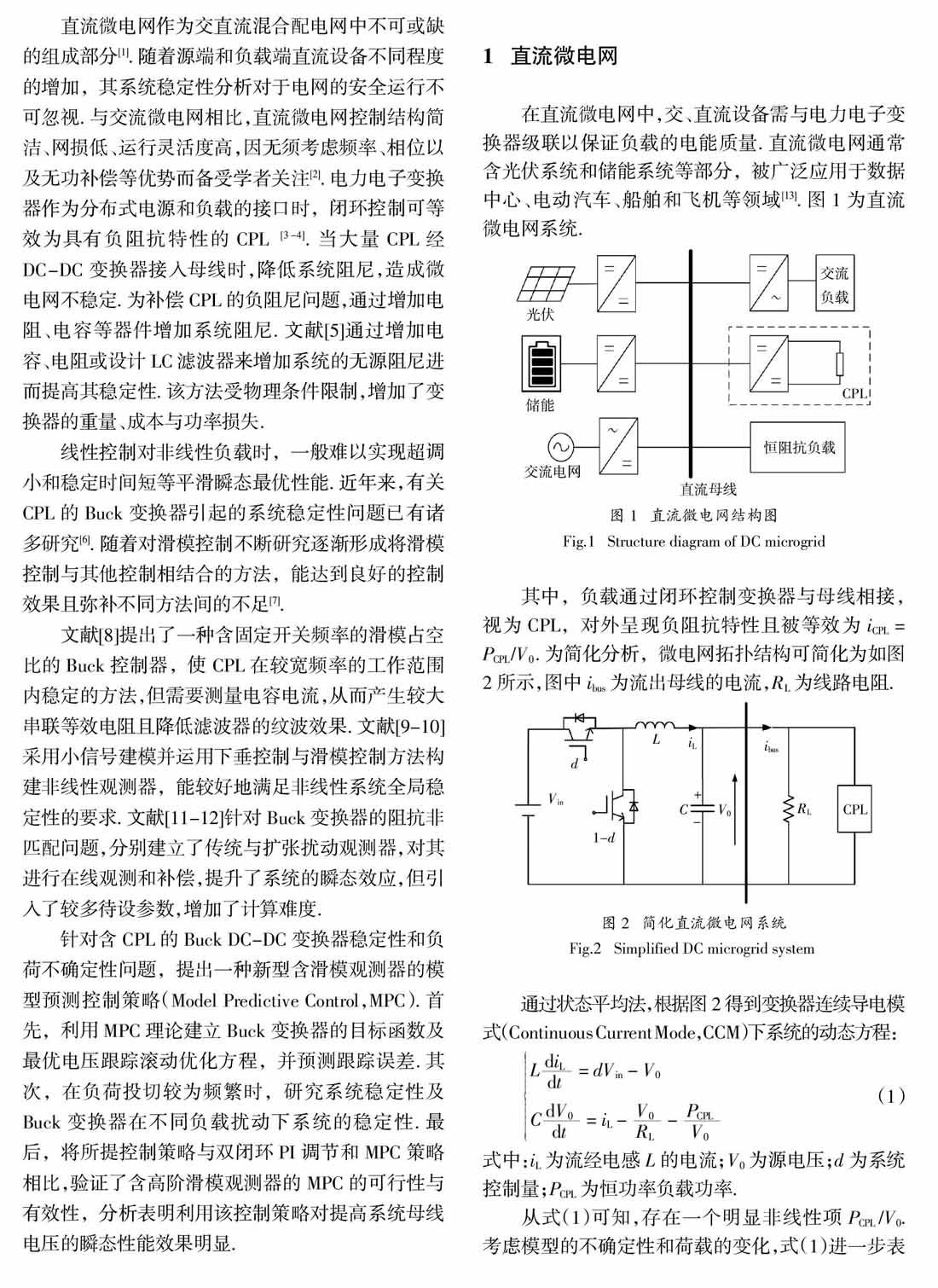
在直流微电网中,交、直流设备需与电力电子变换器级联以保证负载的电能质量. 直流微电网通常含光伏系统和储能系统等部分,被广泛应用于数据中心、电动汽车、船舶和飞机等领域[13]. 图1为直流微电网系统.
其中,负载通过闭环控制变换器与母线相接,视为CPL,对外呈现负阻抗特性且被等效为iCPL = PCPL /V0 . 为简化分析,微电网拓扑结构可简化为如图2所示,图中ibus为流出母线的电流,RL为线路电阻.
通过状态平均法,根据图2得到变换器连续导电模式(Continuous Current Mode,CCM)下系统的动态方程:
式中:iL为流经电感L的电流;V0为源电压;d为系统控制量;PCPL为恒功率负载功率.
从式(1)可知,存在一个明显非线性项PCPL /V0. 考虑模型的不确定性和荷载的变化,式(1)进一步表示为:
式中:L0、C0、V0分别为电感、电容、母线电压的标称值;g1、g2为集总不确定度;Vin0为初始状态的源电压.
2 MPC控制器的设计
MPC具有控制简单、鲁棒性高及可实现多个目标同时控制等优点[14]. 为实现对电压的精确跟踪与控制,提出一种基于系统当前状态,构建时域目标函数非线性扰动MPC复合控制策略,并在线寻求最优控制律,施加于Buck变换器.
2.1 预测模型
3 稳定性分析
为研究高阶滑模观测器的MPC在直流微电网经受小扰动后的稳定性能,建立系统阻抗模型如图 4 所示.
根据式(22)~式(24)及图6可知,当恒功率负荷突增时 ZL(s) 的模变小,所以大量的恒功率负载接入直流微电网将导致母线电压出现波动且系统不稳定. 但由式(2)、式(4)和式(20)组成的直流微电网的闭环控制系统可知,其收敛于期望平衡点(V0,iL),故接入所提控制器直流系统模型满足小信号稳定性.
4 仿真验证
为研究负荷变化对直流微电网母线电压精确跟踪以及所提控制策略对其系统稳定性影响的有效性. 因系统中各类负载及控制参数在分析中会经常变动,本节在两种不同工况下进行验证分析. 图2所示的简化直流微电网的系统参数如表1所示,并在 Simulink 平台搭建详细的电磁暂态仿真模型及实物验证.
令直流微电网分别接入恒阻抗负载、恒功率负载. 并令 2 种负载分别从 500 W 阶跃至 1.50 kW,即恒阻抗负载 RL由 20 Ω突变至6.67 Ω.
图7从上至下依次为恒阻抗负载和恒功率负载突增时对应的直流母线电压仿真图.
从图7中可以看出,恒阻抗负载对应的波动较小,对于突变的恒功率负载,由于不满足其稳定性判据,系统电压最终崩溃. 上述分析表明,对于同样大小的负载功率扰动,恒功率负载对于系统稳定性的影响最大. 对于同样功率的扰动,若系统可以承受恒功率负载引起的波动,则可以承受任意比例组合的恒阻抗负载和恒功率负载引起的擾动并搭建如图8所示实验平台.
工况一:采样周期为Ts = 0.02 s,且保证接入PCPL = 1.5 kW的恒功率负载的直流微电网稳态运行. 在0.02 s时将恒功率负载突降至500 W;0.03 s时接入1 kW阻抗负载,0.04 s时退出阻性负载;0.05 s时,恒功率负载由500 W 阶跃至1.50 kW. 所提控制策略随CPL和阻抗负载变化的结果如图9所示.
由图9可知,当负载突然减小或增大时,实际电压会在较短时间内(t = 0.2 ms左右)精确地跟踪母线电压并趋于稳定,且在预测周期内获得最优瞬态性能,在CPL和阻抗负载变化时,母线电压均可以被精确地跟踪与调节.
工况二:采样周期为Ts = 0.02 s,且保证接入PCPL = 500 W的恒功率负载的直流微电网稳态运行. 在 0.03 s时将负荷功率增加至1.5 kW,在0.06 s左右时将负载功率增大至2 kW. 在PI控制下,恒功率负载在0.03 s时从500 W增加到1.5 kW;由图10可知,电压的瞬态性能良好且能精确跟踪母线电压. 当负载在0.06 s时阶跃至2.0 kW时,母线电压与线路电流的波形幅度变化均增大,超调增大,系统不稳定性显著提高,若继续增大负载功率,将使母线电压发散,甚至引起系统崩溃.
由图7可知,直流微电网中分别接入恒阻抗负载与CPL时,纯CPL易受扰动,稳定性较差. 当CPL负荷的功率变化时,母线电压V0与电感电流iL的变化趋势如图11所示. 系统的初始状态为PCPL = 500 W,在 0.03 s时将负荷功率增加到1.5 kW,在0.06 s左右时负载功率增大至2 kW. 由仿真结果可知,与PI调节相比,所提控制策略在0.06 s可以达到稳定状态,且电压依然精确跟踪母线电压. 此时,最大暂态电压小于0.94%,与阻抗比判据得到的结论基本一致. 结果表明,该策略具有优越的瞬态性能.
在MPC策略下,恒功率负载在0.03 s时,从500 W增加到1.5 kW,在0.06 s时,阶跃至2.0 kW,由图12和图13可知,此时,线路电流iL的瞬态性能出现明显偏差且母线电压跌落较严重. 对比图9~图13可知,在较大的恒功率负载接入微電网系统时,本文所提含高阶滑模观测器的MPC控制策略能较好地满足母线电压的跟踪,减小因负载扰动引起的电压抖动,且在高于3~4倍负荷的情况下依旧可以实现对电压瞬态性能的跟踪及精确调节.
5 结 论
本文设计了一种含高阶滑模观测器的MPC控制,其贡献点和优点可概括为:
1)从可行性来说,针对 Buck 变换器存在未知扰动负载变化时,传统线性 PI 调节和连续时域滑模控制存在不足,高阶滑模观测器的MPC控制便于设计,易于实现,且在线计算量较小.
2)从鲁棒性来说,高阶滑模观测器的MPC控制策略具有无偏差精确跟踪并调节母线电压的功能. 在工况一、二下,均能改善系统的电压波形质量,提高系统电压的瞬态性能,预防抖振及滑模观测器的相对阶问题. 后经稳定性分析,验证了所提控制策略具有更好的动态性能.
3)从实用性来说,基于高阶滑模观测器的MPC控制策略适用于工况一、二. 不论在负载类型变化还是在系统稳态或高于3~4倍负荷等不同工况下,所提策略均表现出良好的暂态性能.
4)从控制性能来说,相比传统PI与MPC控制,文中所提策略在改善母线电压瞬态性能及无偏差精确跟踪方面均优于前者,具有更好的控制性能.
参考文献
[1] 厉泽坤,孔力,裴玮,等. 基于混合势函数的下垂控制直流微电网大扰动稳定性分析[J]. 电网技术,2018,42(11):3725—3734.
LI Z K,KONG L,PEI W,et al. Large-disturbance stability analysis of droop-controlled DC microgrid based on mixed potential function[J]. Power System Technology,2018,42(11): 3725—3734. (In Chinese)
[2] 施静容,李勇,贺悝,等. 一种提升交直流混合微电网动态特性的综合惯量控制方法[J]. 电工技术学报,2020,35(2):337—345.
SHI J R,LI Y,HE L,et al. A comprehensive inertia control method for improving the dynamic characteristics of hybrid AC-DC microgrid[J]. Transactions of China Electrotechnical Society,2020,35(2):337—345. (In Chinese)
[3] 庄绪州,张勤进,刘彦呈. 基于负阻抗特性补偿的船舶DC/DC变换器控制策略[J]. 电力系统及其自动化学报,2019,31(5):27—32.
ZHUANG X Z,ZHANG Q J,LIU Y C. Control strategy for DC/DC converter in ship based on negative impedance compensation[J]. Proceedings of the CSU-EPSA,2019,31(5):27—32. (In Chinese)
[4] 孟建辉,邹培根,王毅,等. 基于灵活虚拟惯性控制的直流微网小信号建模及参数分析[J]. 电工技术学报,2019,34(12):2615—2626.
MENG J H,ZOU P G,WANG Y,et al. Small-signal modeling and parameter analysis of the DC microgrid based on flexible virtual inertia control[J]. Transactions of China Electrotechnical Society,2019,34(12):2615—2626. (In Chinese)
[5] CESPEDES M,XING L,SUN J. Constant-power load system stabilization by passive damping[J]. IEEE Transactions on Power Electronics,2011,26(7):1832—1836.
[6] 张旭辉,温旭辉,赵峰. 抵消恒功率负载负阻抗特性影响的双向Buck/Boost变换器控制策略[J]. 电工技术学报,2013,28(11):195—201.
ZHANG X H,WEN X H,ZHAO F. The control scheme counteracting negative impedance of constant power load for Bi-directional Buck/Boost[J].Transactions of China Electrotechnical Society,2013,28(11):195—201. (In Chinese)
[7] 刘欣博,高卓. 考虑恒功率负载与储能单元动态特性的直流微电网系统大信号稳定性分析[J]. 电工技术学报,2019,34(S1):292—299.
LIU X B,GAO Z. Large signal stability analysis of DC microgrid system considering dynamic characteristics of constant power load and energy storage system[J]. Transactions of China Electrotechnical Society,2019,34(S1):292—299. (In Chinese)
[8] ZHAO Y,QIAO W,HA D. A sliding-mode duty-ratio controller for DC/DC buck converters with constant power loads[J]. IEEE Transactions on Industry Applications,2014,50(2):1448—1458.
[9] 支娜,張辉,肖曦,等. 分布式控制的直流微电网系统级稳定性分析[J]. 中国电机工程学报,2016,36(2):368—378.
ZHI N,ZHANG H,XIAO X,et al. System-level stability analysis of DC microgrid with distributed control strategy[J]. Proceedings of the CSEE,2016,36(2):368—378. (In Chinese)
[10] SINGH S,FULWANI D,KUMAR V. Robust sliding-mode control of dc/dc boost converter feeding a constant power load[J]. IET Power Electronics,2015,8(7):1230—1237.
[11] WANG J X,LI S H,YANG J,et al. Extended state observer-based sliding mode control for PWM-based DC-DC buck power converter systems with mismatched disturbances[J]. IET Control Theory & Applications,2015,9(4):579—586.
[12] HUSSAIN M N,MISHRA R,AGARWAL V. A self-switched virtual impedance based stabilization method for a droop controlled DC microgrid with Constant Power Loads and input load filters[C]//2016 IEEE International Conference on Power Electronics,Drives and Energy Systems (PEDES). Trivandrum,India:IEEE,2016:1—6.
[13] 陈杰,李志平,张国柱. 不确定非线性系统的高阶滑模控制器设计[J]. 控制理论与应用,2010,27(5):563—569.
CHEN J,LI Z P,ZHANG G Z. Higher-order sliding-mode controller for a class of uncertain nonlinear systems[J]. Control Theory & Applications,2010,27(5):563—569. (In Chinese)
[14] YU K,AI Q,WANG S Y,et al. Analysis and optimization of droop controller for microgrid system based on small-signal dynamic model[J]. IEEE Transactions on Smart Grid,2016,7(2):695—705.
[15] 年珩,叶余桦. 三端口隔离双向DC-DC变换器模型预测控制技术[J]. 电工技术学报,2020,35(16):3478—3488.
NIAN H,YE Y H. Model predictive control of three-port isolated bidirectional DC-DC converter[J]. Transactions of China Electrotechnical Society,2020,35(16):3478—3488. (In Chinese)
[16] XU Q W,BLAABJERG F,ZHANG C L,et al. An offset-free model predictive controller for DC/DC boost converter feeding constant power loads in DC microgrids[C]//IECON 2019-45th Annual Conference of the IEEE Industrial Electronics Society. Lisbon,Portugal:IEEE,2019:4045—4049.
[17] CUCUZZELLA M,INCREMONA G P,FERRARA A. Decentralized sliding mode control of islanded AC microgrids with arbitrary topology[J]. IEEE Transactions on Industrial Electronics,2017,64(8):6706—6713.
[18] 张学,裴玮,邓卫,等. 含恒功率负载的交直流混联配电系统稳定性分析[J]. 中国电机工程学报,2017,37(19):5572—5582.
ZHANG X,PEI W,DENG W,et al. Stability analysis of AC/DC hybrid distribution system with constant power loads[J]. Proceedings of the CSEE,2017,37(19):5572—5582. (In Chinese)
收稿日期:2020-11-09
基金项目:国家自然科学基金资助项目(61863022),National Natural Science Foundation of China(61863022);兰州市人才创新项目(2017-RC-95),Lanzhou Talent Innovation Project(2017-RC-95);国家重点研发计划资助项目(2018YFB1201602-06),National Key R & D Program(2018YFB1201602-06);兰州交通大学-天津大学联合创新基金资助项目(2020056),Lanzhou Jiaotong University-Tianjin University Joint Innovation Fund(2020056)
作者简介:陶彩霞(1972—),女,甘肃白银人,兰州交通大学教授,硕士生导师
通信联系人,E-mail:1733425004@qq.com
猜你喜欢
科技视界(2017年35期)2018-03-09 20:37:34
科学与财富(2018年1期)2018-03-03 01:51:59
科技视界(2017年23期)2017-12-09 07:56:32
科技创新导报(2017年14期)2017-08-24 11:15:45
数字技术与应用(2016年10期)2017-04-01 22:02:08
哈尔滨理工大学学报(2016年6期)2017-02-21 20:49:45
哈尔滨理工大学学报(2016年6期)2017-02-21 17:45:40
科技创新导报(2016年20期)2016-12-14 08:55:17
科技资讯(2015年4期)2015-07-02 17:55:56
哈尔滨理工大学学报(2015年1期)2015-06-23 00:14:30