
老年人下肢康复训练机器人运动识别方法研究
2021-09-26 11:27:06黄劲松蔡亚澜
科技促进发展 2021年6期
■ 黄劲松 蔡亚澜
湖北工业大学工业设计学院 武汉 430068
0 引言
从2020年的社会人口结构中可以看到,老龄化将是未来我国面临的主要问题。由于社会的老龄化,我国社会中疾病的范围正在发生不可逆转的变化。随着康复机器人不断发展,逐渐有取代传统康复方法的趋势。康复机器人将多种学科溶于一体,并使用智能仿生技术完成肢体训练,以帮助患者达到康复治疗的目的,已成为康复训练机器人的研究热点之一[1,2]。
到2020年,国内外研究人员对康复步行训练机器人进行了大量的研究,但是大部分研究都集中于系统的控制策略,对用户的动作和意图识别技术研究较少。如马乐等[3]对康复机器人的步态相位转换进行研究,提出一种基于学习矢量量化的神经网络模型,用于确定人体行走过程中支撑腿与摆动腿之间的切换。王瑷珲等[4]提出了一种基于步态数据的鲁棒自适应PD 控制方法,在有限的误差干扰条件下设计了鲁棒自适应PD 控制策略。不仅允许下肢外骨骼机器人快速跟踪由运动捕捉系统获得的人类步态轨迹,而且还避免了过大的初始输出扭矩。何豪等[5]提出了一种优化攀爬路径的步态控制方法,当6足机器人的步态满足连续爬楼梯的基本条件,则将攀爬路径分为两部分并进行优化,并对路径优化中的步态进行研究。
现阶段的意图识别方法以及机器人的造价高昂,实现较为复杂,很难在家庭中进行推广。如丁其川等[6]对运动意图识别方法进行研究与应用。对基于表面肌电信号的运动识别方法进行了成果展示,并对相关研究和应用现状进行分析。陈玲玲等[7]提出了一种基于多尺度置换联合熵的步行机器人运动相容性识别方法。针对表面肌电信号的特性,识别了3 种不同的人机运动相容性。李剑锋等[8]提出了康复机器人的系统方案和运动控制策略。根据患者踝关节肌肉力量水平和训练需求规划运行轨迹,基于传感器采集的患者信息,识别患者踝关节的运动意图,根据意图实现机器人的控制。因为需要一种造价低廉、操作简单的运动和意图识别方法。
在此基础上,文中提出了一种通过采集前臂压力来识别老年人运动意向的方法,建立系统运动学模型,采用模糊拉格朗日插值推断方法识别方向意图,采用比例变化法完成速度意图识别。通过仿真对文中识别方法的优越性进行验证。
1 系统动力学模型
文中的控制目标是处于开发阶段的全方位康复步行训练机器人,它的功能是为老年步态障碍患者提供步行康复和行走支持,它由4 个可以在所有方向上移动的独立驱动的全向轮组成[9]。一些培训项目存储在系统中,因此您无需物理治疗师就可以康复。在实际的康复训练中,将患者的前臂压在臂板上以支撑身体,并沿着康复机器人的轨迹进行步行训练。当老年人使用康复机器人进行康复训练时,重心会发生偏移,会影响康复机器人的跟踪精度[10]。因此,如图1所示,建立了具有重心偏移的全方位康复步行机器人的结构坐标图。
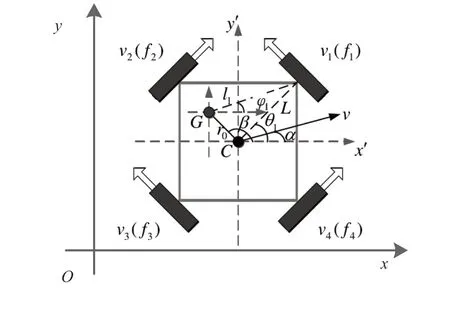
图1 系统结构坐标图
以康复机器人为被控对象,在不考虑外界干扰的情况下,全向轮的线速度如式(1)所示[11]。
4个全向轮对称排布可知θi关系,如式(2)所示[12]。
代入式(1)可得到如式(3)所示。
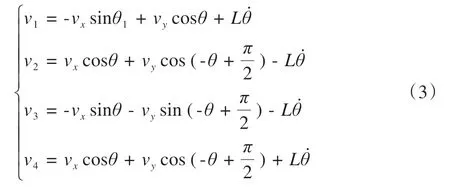
可得康复机器人的运动约束方程如式(4)所示。

2 意图识别
2.1 方向意图识别
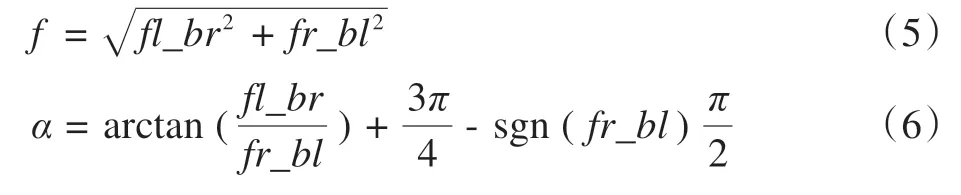
图2 所示如何计算前臂压力合力。在坐标系中,传感器S_FR、S_FL、S_BR、S_BL检测到的压力值由w_fr、w_fl、w_br、w_bl这4 个力矢量的长度表示其数值。选取右前、左前、右后、左后4 个方向,分别对应45°、135°、315°、225°,4 个压力矢量的合力方向是患者的方向意图[13]。公式(5)和(6)所示计算合力矢量长度和轴之间的角度。
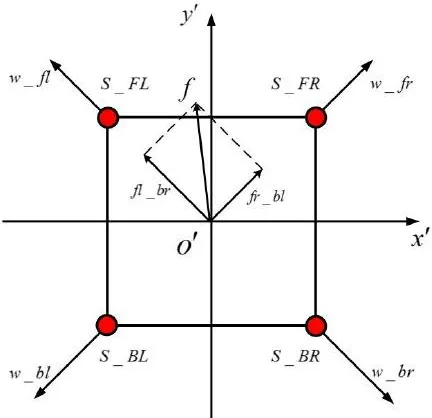
图2 合力矢量
通过模糊推理建立方向意图与前臂压力对应关系数据库[14]。在此实验中,通过6 名65 岁左右的老人进行实验。因此无法对全部方向进行压力数据采集,只选择了8 个方向进行压力数据采集,分别为右、右前、前、左前、左、左后、后、右后,对应角度分别为0°、45°、90°、135°、180°、225°、270°、315°[15]。康复机器人操作者沿着以上8个方向进行实验,将康复机器人连接到主机,并使用软件在每个方向上记录300组压力数据。消除无意义的数据,并计算平均值和标准差。
Aij为均值和标准差定义的一组三角模糊集,Bi为8个方向意图的单个元素集,(模糊规则代码i= 1,2,3,...,8,模糊规则条件代码j= 1,2,3,4)。4个条件的隶属函数为“和”关系,4 个传感器的实时压力数据Aj也定义为一个单元集[16]。图3 所示三角模糊集与实时压力数据集,其中为均值-标准差,为均值,为均值+标准差。
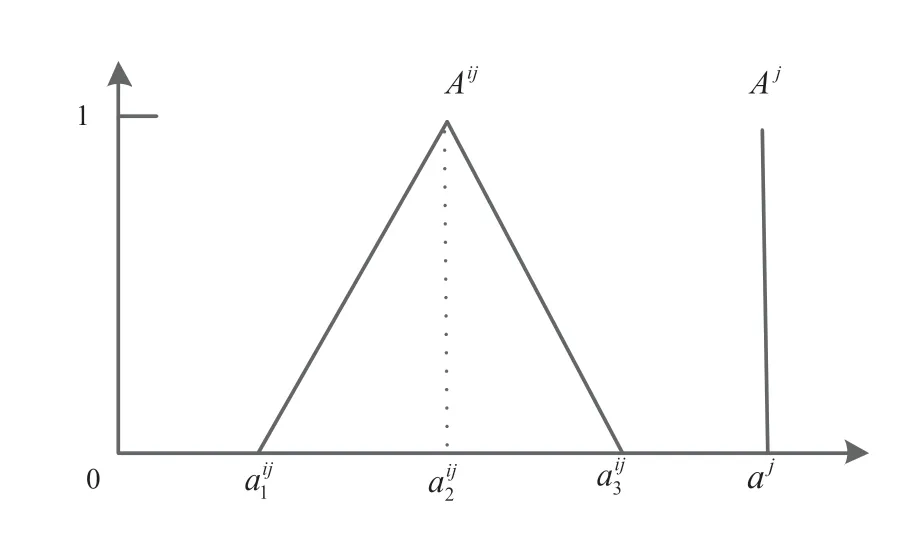
图3 三角模糊集与实时压力数据集
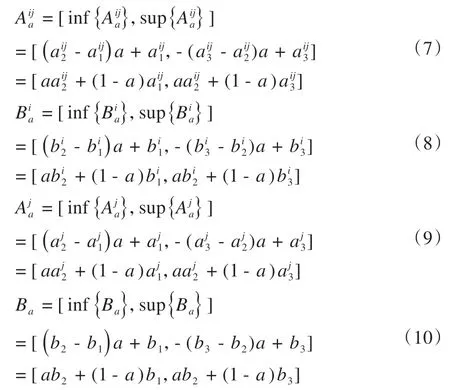
根据a-截集,将Aij、Bi、Aj、B分别表示为如式(7)至(10)所示[17]:
如果A1=Ai1,A2=Ai2,A3=Ai3,A4=Ai4,则B=Bi(i= 1,2,...,8),本质是,当满足a∈[0,1]时,
Ba为关于(j= 1,2,3,4)的映射,如式(11)所示。

即如式(12)和(13)所示:

根据以上分析,映射F应满足式(14)所示[18]。

多维映射函数由拉格朗日插值构建,如式(15)所示[19]。

Ba值可以通过式(7)和(12)计算。 最后,根据分解定理获得方向意图B,如式(16)所示[20]。

2.2 速度意图识别
通过采集操作者施加在康复训练机器人上的合力来识别速度意图的新想法,患者将康复训练机器人向某个方向移动的次数变多,其方向的速度意图移动的越快。对前臂压力进行分析时,需要考虑左右手的习惯、肌肉力量、运动方向意图等个体的差异[21]。式(5)所示计算4 个压力的合力,式(17)所示计算老年人速度意图[22]。

在式中,F为确定f和v比率的参数。由于个体的不同,存在着身高、体重、左右手习惯等的不同,不同的人取不同的F值。老年人在使用康复机器人之前需要对F进行校正,要想对所有方向进行测试是不现实的,
选择具有代表性的方向进行数据采集,获得F近似值[23]。
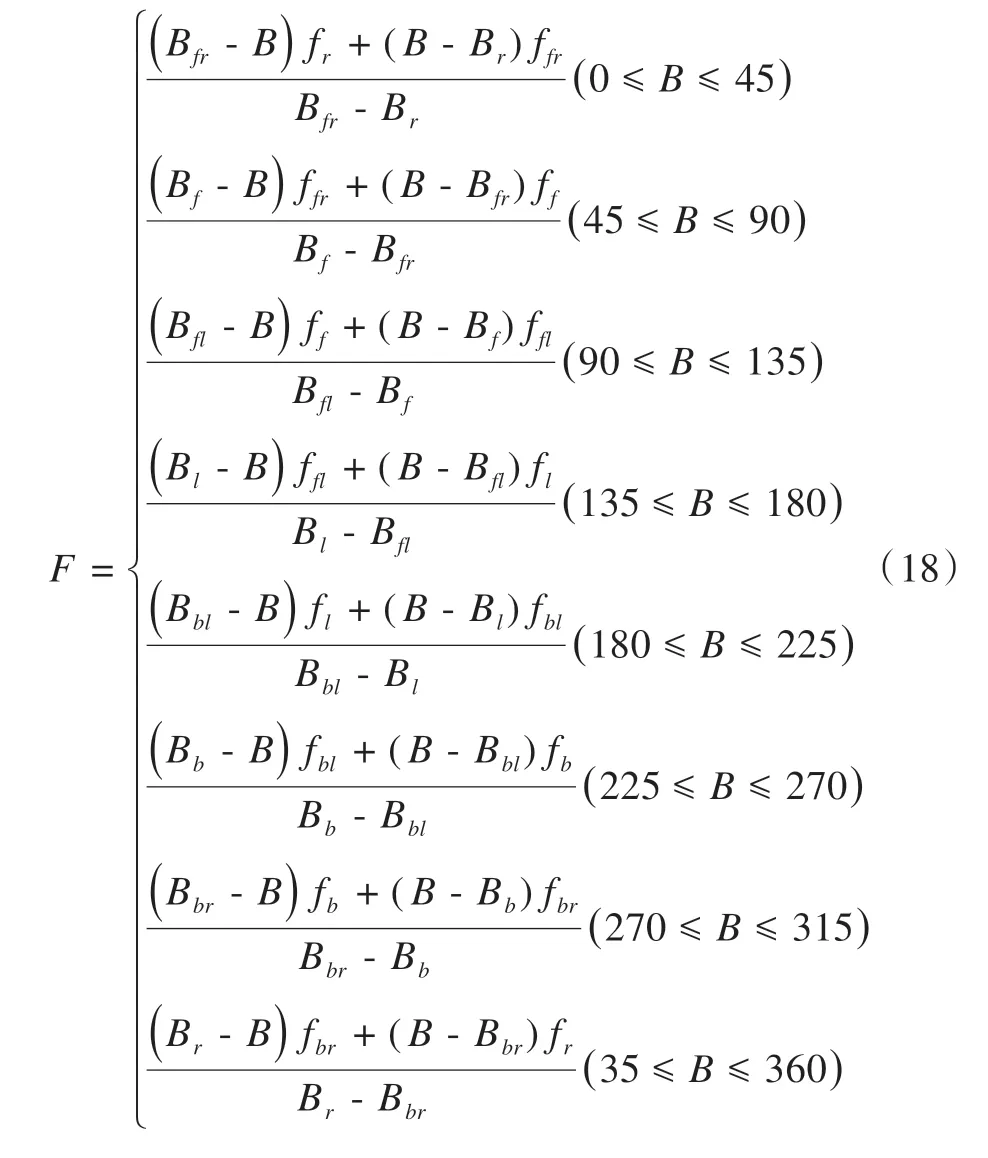
以一名65岁男性为实验对象,研究了运动时前臂压力的最大合力[24]。使用康复训练机器人以0.25m/s 的速度沿一下8 个方向进行行走(右、右前、前、左前、左、左后、后、右后),运动过程中受试者前臂压力的最大合力值为fr,ffr、ff、ffl、fl、fbl、fb、fbr,对应的方向为Br、Bfr、Bf、Bfl、Bl、Bbl、Bb、Bbr。f为实时测量的前臂压力合力值,对应的方向意图为B。将最大合力值相对于方向区间内随角度值的变化视为线性变化,通过式
(18)计算F的近似值[25]。
3 仿真结果与分析
3.1 仿真参数
图4 所示康复机器人的外观,康复机器人的最重要特征是全向轮,安装在底盘上。由于采用4个全向轮,康复机器人不需要改变身体位置就可以全方位进行移动,在狭窄的空间也可以自如的进行行走[26]。这种全方位运动不仅提高了康复训练的效率,而且使康复机器人的操作对患者来说更加的方便。 表1 所示康复机器人的主要参数。前臂支撑高度为900~1200mm,可以根据不同身高的患者进行自适应的调节[27]。为了保证康复训练机器人使用者的安全,最大移动速度为0.25m/s。采用超声波传感器检测周围障碍物,接触式传感器检测患者是否摔倒,提高康复机器人的安全性,最大限度的保护使用者的安全。

图4 康复步行训练机器人实物
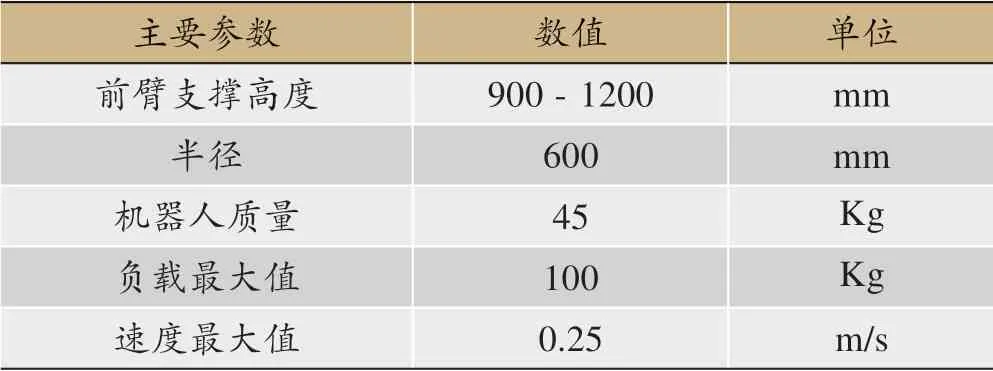
表1 康复机器人参数表
3.2 方向意图识别
对康复步行训练机器人的方向意图识别方法进行仿真实验,验证文中方向意图识别方法的有效性。在实验中,选择65岁老人健康男性作为实验对象。沿着8个方向进行行走,分别为右、右前、前、左前、左、左后、后、右后,对应角度分别为0°、45°、90°、135°、180°、225°、270°、315°。 记录10s 内传感器的压力数据,记录总共8组的传感器压力数据,将它们带入到方向意图识别算法中进行仿真实验,得到图5所示的仿真结果。
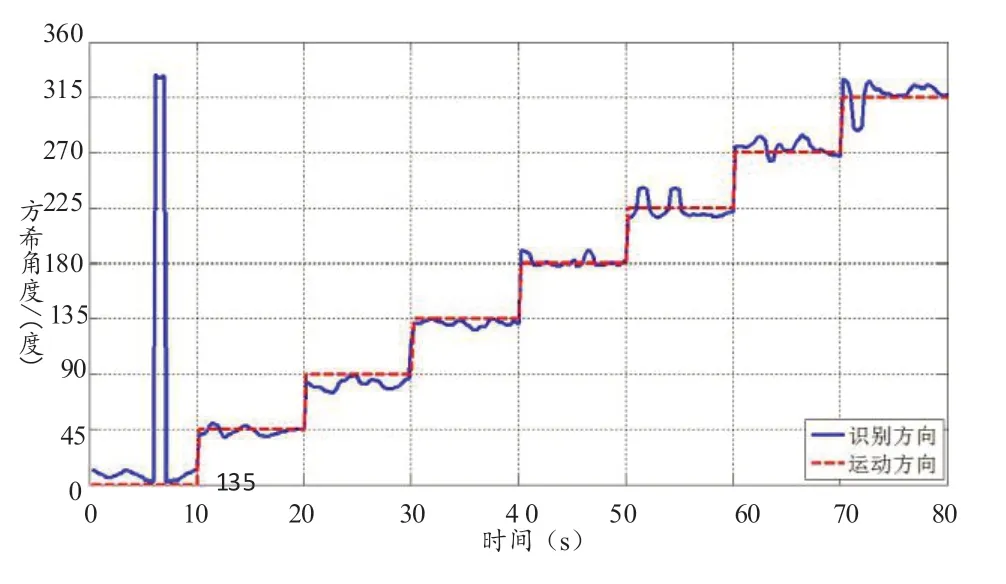
图5 方向识别仿真结果
图5 中的红色虚线为实际运动方向,蓝色实线为采用文中方法的识别方向,除了在(0~10s)有一点震动之外,识别方向与运动方向基本一致,得出一下结论。
(1)通过推论计算得到的实际运动方向与识别结果基本一致,说明提出的方向识别方法是可行的。
(2)图中的初期振动(0~10s)区域出现大振幅震动,它是由调整重心和运动方向引起的。
(3)图中早期(0~10s)区域的大振幅振动数据在340°左右,非常接近0°,是合理的。
3.3 速度意图识别
对康复步行训练机器人的速度意图识别方法进行仿真实验,验证文中速度意图识别方法的有效性。在实验中,选择65 岁老年健康男性作为实验对象,沿着4 个方向以0.25m/s的速度进行行走,分别为30°,120°,210°,300°。并对行走10 秒内各个方向上的压力数据进行记录,记录总共4组的传感器压力数据,将数据带入式(17)进行仿真实验,仿真结果如图6、图7所示。
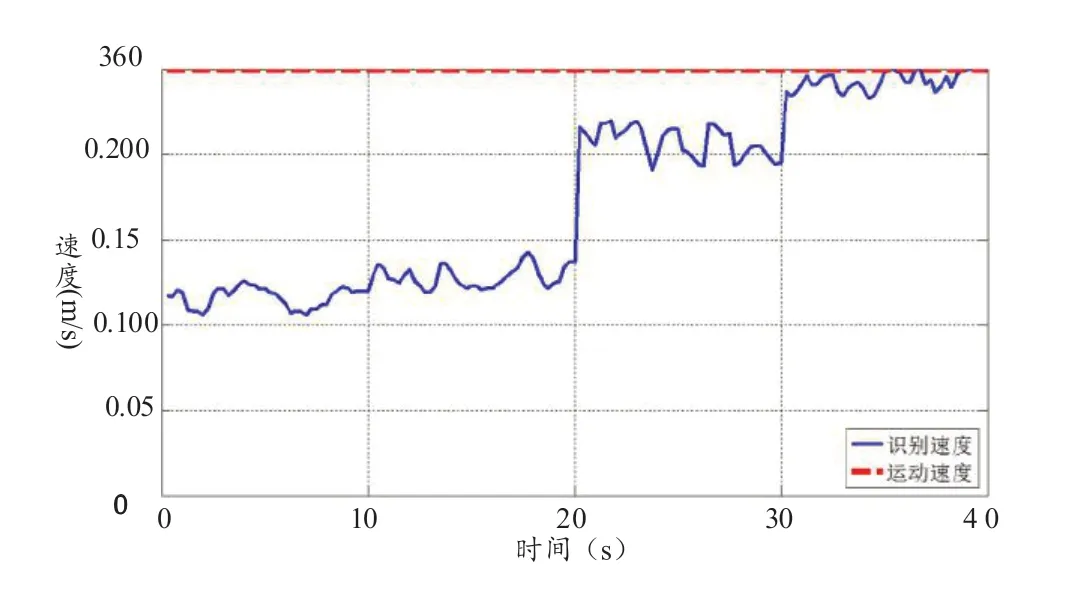
图6 F为定制时速度计算结果
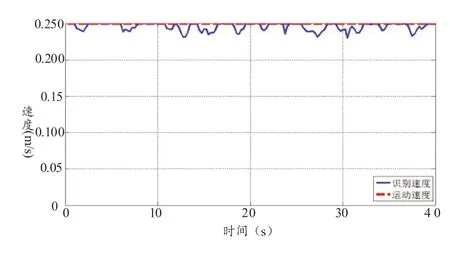
图7 F为变量时速度计算结果
图6 和图7 中的红色虚线为实际运动速度,蓝色实线为采用文中方法的运动虚度。从图6 和图7 所示的仿真结果可以看出,F作为定值和变量得到的仿真结果是完全不同的。将F作为定值时,文中速度识别方法的识别速度与真实运动速度波动非常大。将F作为变量时,如图7 所示,文中速度识别方法的识别速度与实际运动速度图像基本一致,说明在计算速度意图时有必要考虑前臂施力特性和运动方向等因素的影响。
4 结束语
智能康复作为一个新兴的领域,已经被证明是一种有效的康复方案,文中康复机器人采用4个全向轮,康复机器人不需要改变身体位置就可以全方位进行移动,在狭窄的空间也可以自如的进行行走,通过采集前臂压力来识别老年人运动意图的方法。主要结论如下:
(1)使用模糊拉格朗日插值法识别机器人的运动方向意图,仿真结果可以看出,除了在(0~10s)有一点震动之外,识别结果与实际运动方向基本吻合,说明文中所提方向意图识别方法具有一定的实用性。
(2)使用比例变化方法识别速度意图,仿真结果可以看出,压力数据对识别结果有较大的影响,只有为变量时识别速度与实际速度吻合,说明在计算速度意图时有必要考虑前臂施力特性和运动方向等因素的影响,文中所提速度意图识别方法具有一定的实用性。
这种全方位运动识别不仅提高了康复训练的效率,而且使患者对康复机器人的操作更加简单、方便。智能康复目前的发展水平还不足以取代传统的康复方案,考虑到实验设备和数据的规模,对老年人康复步行训练机器人的意图识别的研究才刚刚开始。基于此,逐步改进和完善将是下一步的重点。
猜你喜欢
包装工程(2023年24期)2023-12-27 09:17:36
临床骨科杂志(2022年5期)2022-11-05 09:27:54
法律方法(2022年2期)2022-10-20 06:42:20
福建基础教育研究(2022年4期)2022-05-16 08:48:40
今日农业(2021年4期)2021-06-09 06:59:58
法律方法(2021年3期)2021-03-16 05:56:58
公民与法治(2020年20期)2020-11-27 01:44:46
中学生数理化·八年级物理人教版(2017年3期)2017-11-09 03:05:35
中国医疗美容(2015年2期)2015-07-19 10:11:59
中国中医药现代远程教育(2014年15期)2014-03-01 04:27:49
