
区域进场扇区点融合飞行程序应用探讨
2021-09-26 01:03黑妍茹张振东
中国民航大学学报 2021年4期
黑妍茹,王 子,张振东
(中国民用航空中南地区空中交通管理局空中交通管制中心,广州 510800)
区域进场扇区作为航路管制和终端区管制之间的衔接扇区,既要理顺空域内的巡航航班流,又兼具预排序落地航班流的任务。对于这种混合任务性质的扇区,传统的开环式雷达引导模式仍占主导,尽管其为管制员调配航班提供了极大的灵活性,但在高密度航班流的情况下,对管制员的快速反应决策能力和飞行员的密切配合要求很高,易导致地空通话过于频繁,工作负荷峰值运行。高自由度的另一面预示着航班流的可预测性较低,航迹更为离散,潜在冲突激增。因此,迫切需要一种新的方法来解决高密度航班流下区域进场扇区的航班精细化排序问题。
点融合(PM,point merge)技术[1]最早由欧洲航行安全组织实验中心于2006年提出,旨在改进并标准化终端区运行模式。与传统的开环指令不同,其采用系统化方法融合进场航班流,航迹灵活可控且可预测性高。在国外:Boursier 等[2]首先提出了点融合进近的基本结构;Ivanescu 等[3]利用实时仿真航迹模拟融合4个航班流,并提出了双跑道点融合进近的基本结构;欧控(EUROCONTROL)[4]实验中心与法国巴黎区域管制中心进行了一系列模拟实验,分析研究其在区域扇区应用的可行性、有效性和局限性。在国内:邹朝忠等[5]率先介绍了点融合技术及应用前景;郝帅[6]在厦门基于性能的导航(PBN,performance based navigation)飞行程序设计中融入点融合程序设计思想;陈相安[7]、孙晓萌[8]、晁绵博等[9]结合PBN 程序设计,研究在终端区设计点融合进近程序的优化方案;王建忠等[10]探讨了点融合进近的4D 航迹规划。2019年12月5日,上海浦东国际机场成为国内首个实施点融合飞行程序的机场,2020年1月2日,点融合飞行程序在广州白云国际机场也正式投入使用。该技术在国内的成功落地更加验证了点融合技术在实现中国空域标准化运行方面具有巨大优势。
现有研究较多集中于机场终端区内的运行及效率问题,鲜有关注并验证该技术在其他空域的拓展和应用。据欧控实验中心统计,点融合飞行程序已成功地应用于17 个国家的25 个机场(不包括中国),但对于全球区域管制,目前只有巴黎区域管制1 家[11-12]投入使用。基于上述不足,将点融合飞行程序的优势从终端区向区域进一步延伸。以广州区域典型进场扇区为例,设计点融合飞行程序方案并进行模拟评估,分别从雷达模拟机和计算机仿真两方面验证。实验表明,点融合技术能够有效解决大流量下区域进场航班排序与调度问题,提升整体飞行效率。所研究的区域进场扇区点融合飞行程序丰富了点融合飞行程序在应用分析方面的理论研究,为其在区域管制范围内的推广和应用提供了参考和依据。
1 点融合飞行程序
1.1 概念
与传统的雷达引导相比,点融合飞行程序为管制员提供了一种结构化的航班流排序方法。通过使用简单明了的闭环管制指令,从开始阶段就使管制员全局把控空域运行态势,在提高航迹可预测性及飞行监控效能的同时,降低了管制员对运行航空器的干预程度,减轻了管制工作负荷。
1.2 程序结构
点融合飞行程序运行基于特定P-RNAV 航路结构,即预定义的点融合系统。标准的点融合飞行程序结构如图1 所示,包括下列组成部分。
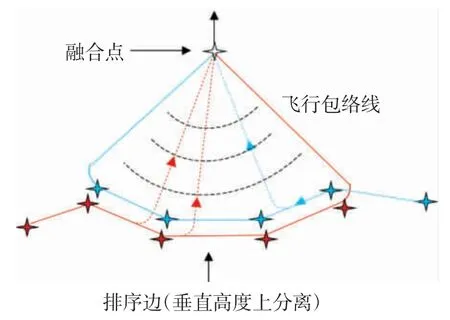
图1 点融合飞行程序结构图Fig.1 Typical configuration of point merge flight procedure
1)融合点
进场过程中,多个方向的航班流完成排序重组后,最终依次通过的一个物理坐标点。
2)排序边
以融合点为圆心,以预定义距离为半径所设计的近似圆弧航段。航段由定位点连接,航段上任意一点到融合点距离相同。排序边专用于实现航迹的伸缩,以达到加速或延误航班流的目的。
3)飞行包络线
与融合点和排序边一起形成一个扇形区域,将所有航班流的航迹近乎控制在这个区域内。
1.3 基本运行方式
点融合运行方式的前提是所有航空器都在预定义的点融合飞行程序上自主飞行,管制员只在恰当的时机进行干预[11]:①通过向排序边上某一架航空器发布“直飞融合点”指令来创建安全间隔;②离开排序边后,通过控制速度来保证安全间隔。管制员依靠排序边的等距特性可轻松、直观地实现排序与间隔预判。
2 案例设计
2.1 现行飞行程序分析
2.1.1 扇区结构特点
为探讨区域进场扇区的航班流整合问题,选取广州区域管制范围内的典型进场扇区4 号(AC4)和30号(AC30)进行点融合飞行程序设计及模拟验证,如图2 所示。AC30 为AC4 的高扇,因此两者的水平范围相同。AC4+AC30 扇区的物理结构近似一个扇形结构,如图3 所示,进场方向分别为MUBEL、ATLAT、OSIKA、P101,具有单一进港点GYA,4 条航路航线由西向东汇聚于此,其中R474 为飞越双向航路。本扇区的主要任务是从混合航班流中分离落地珠三角的航班,并排序依次通过GYA 进入广州终端区,同时处理好所有航路在GYA 的飞越航班流的汇聚冲突。该扇区在功能上接近一个扩展终端区。
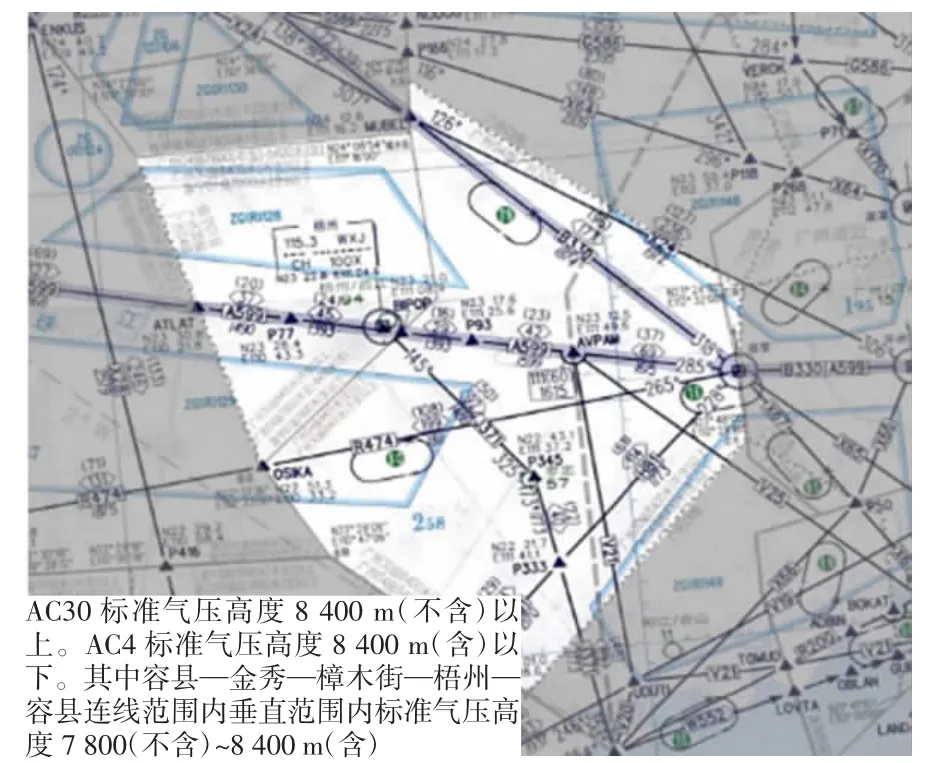
图2 广州AC4+AC30 扇区图Fig.2 Enroute chart of Guangzhou AC4+AC30 sectors
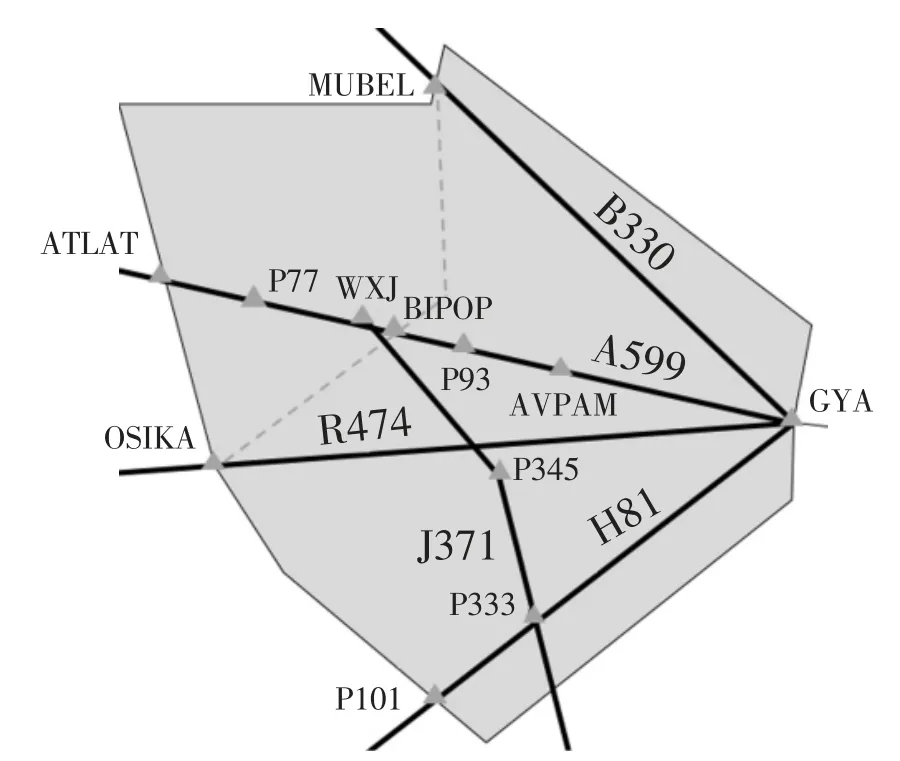
图3 广州AC4+AC30 扇区航路图Fig.3 Main routes of Guangzhou AC4+AC30 sectors
2.1.2 扇区航班流构成
分析2019年春运(1月21日—3月1日)数据,梳理AC4+AC30 扇区航班流构成。根据数据统计,落地珠三角的航班占扇区内所有航班总量的59%,区域内飞越航班与落地航班数量接近2 ∶3。落地广州的航班在所有落地航班中占56%。因此,分析占比最高的落地广州航班流具有代表意义。
根据各走廊口落地广州航班流的统计数据,如表1 所示,4 个走廊口中,MUBEL,ATLAT 两个方向承担约70%的航班流,可看作航班排序的主要进港点。
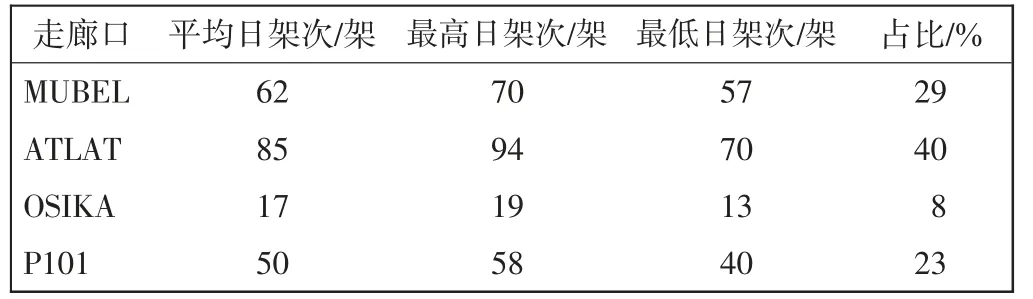
表1 落地广州各走廊口统计数据Tab.1 Statistics of all corridors landing Guangzhou
2.1.3 空域限制情况
在实际管制运行中,军航活动是制约本扇区空域使用的主要因素,包括可用高度层和机动空间的减少以及由此引起的终端区通行能力下降带来的连锁效应。AC4+AC30 扇区周边有多家军航单位,与佛山、遂溪、桂平、桂林4 大活动空域相交。在周边所有军航活动时,扇区内可用空域被消减为正常空域的1/3 如图4 所示(深灰色区域),此时达到了空域极限结构状态,即扇区可用域最小,此时管制调配的难度陡增。
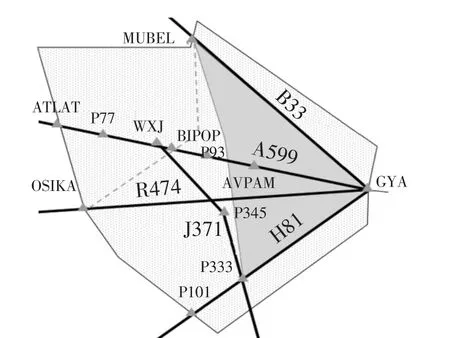
图4 军航活动对AC4+AC30 扇区的空域影响Fig.4 The impact of military aviation activities on airspace of AC4+AC30 sectors
据不完全统计,一年军航活动天数占全年近2/3(数据采集于2018年8月28日—2019年8月28日)。因此,在全年管制运行中,为了应对不同空域用户的需求,AC4+AC30 扇区的空域结构处于随时变化的状态,出现空域极限构型的概率也越来越高。
2.2 点融合飞行程序设计
2.2.1 程序设计基本思路
在区域扇区进行点融合设计考量的要素与终端区扇区略有不同。一方面,空域的空间维度更大,这要求点融合飞行程序中排序边设计的更长,离融合点的距离更远,同时排序边上设定的高度、速度也需随之变化;另一方面,空域内航班流的无差别化,即落地航班之间、落地航班与飞越航班之间并没有严格的高度差异。以上两方面对于在区域扇区内设计点融合飞行程序提出了更高要求。
2.2.2 GYA 点融合飞行程序
在满足飞行程序设计基本原则的基础上,从可行性较高、对其他空域用户影响较小为出发点,设计出以GYA 为融合点,整合4 个方向MUBEL、ATLAT、OSIKA、P101 进港航班的点融合飞行程序,定义为GYA点融合飞行程序,如图5 所示(1 kt=1.852 km/h)。
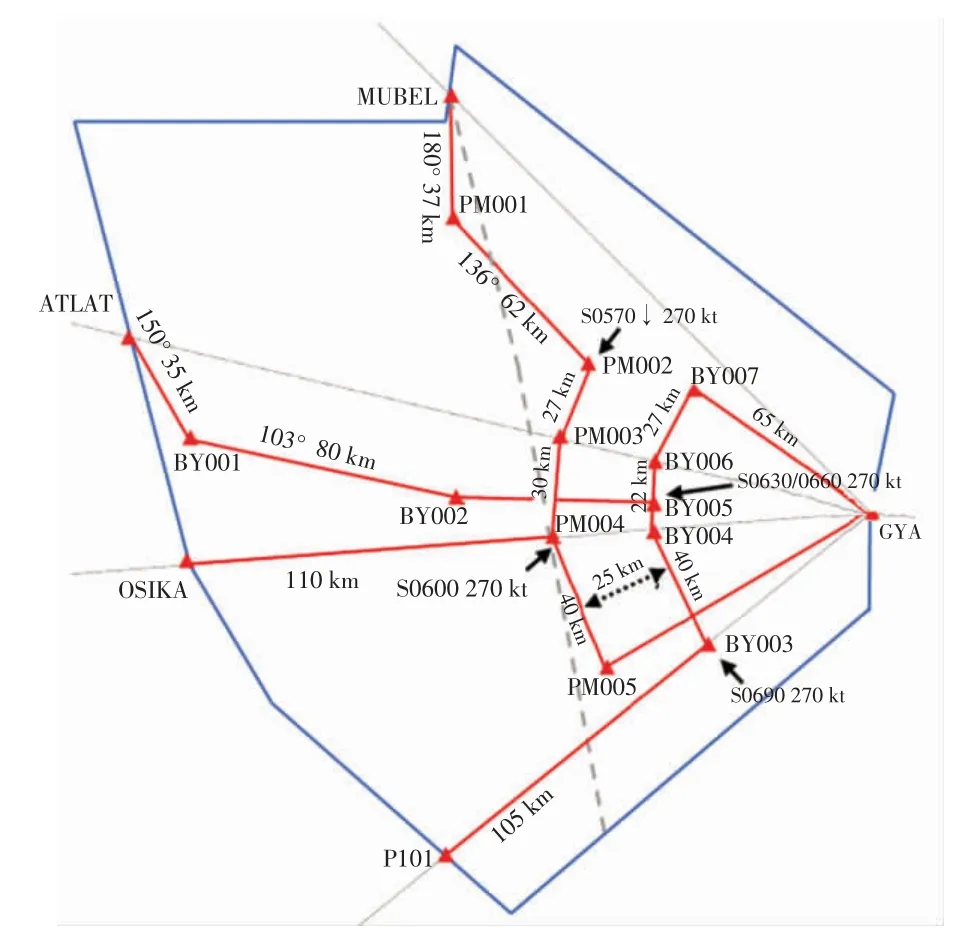
图5 GYA 点融合飞行程序结构Fig.5 Point merge procedure configuration of GYA
GYA 点融合飞行程序采用两条平行排序边的点融合系统,运行方式为落地航班默认沿着预定义的点融合程序飞行,如表2 所示,在满足落地间隔后,管制员可以指挥运行在点融合飞行程序上的航班直飞GYA。

表2 GYA 点融合飞行程序运行方式Tab.2 The operation mode of point merge procedure in GYA
对于进港航班,GYA 点融合飞行程序将分离混合进港航班流及预排序两大任务分解为外围的“高度分离区”及内部的“进港排序区”。MUBEL 与ATLAT 两点的点融合飞行程序设置了平行原航路的高度分离区,从程序上分离了落地广州的航班和其他航班,解决了落地航班的连续下降问题,同时将这两个大流量进港点的航班流分流至不同排序边,以平衡两条排序边上的总航班流。OSIKA 与P101 方向进场的航班流较少,采用与外管制单位灵活调配机制,在区域外调整速度保证一定的间隔裕度,使落地航班进区域后可以沿原航路飞行并下降高度,然后分别加入内外排序边,进行统一排序。对于飞越航班,MUBEL 与ATLAT 方向的高度分离区加之OSIKA 与P101 方向的调配机制,给予飞越航班充足的调配时间,有效解决了在GYA 的航班流汇聚冲突问题。
为应对排序边的溢出:在空域条件允许时,在排序边最后一个定位点后可以实施雷达引导调节间隔;在空域条件不允许时,通过调节速度来确保航空器之间的安全间隔。
2.2.3 程序的构型参数
点融合飞行程序的结构范围、路径延伸能力及结构中各部分数据参数的设计立足于飞行程序设计基本原则,同时综合考虑安全性、可行性、高效性等诸多要素。
1)结构范围
考虑到军航活动时可用空域资源的变化对实施点融合飞行程序的影响,结合AC4+AC30 扇区空域结构特点和实际情况,GYA 点融合飞行程序选择设计在以GYA 为圆心,西侧90 km 的扇形区域内。为尽可能提高程序运行效率,主要程序的结构尺寸控制在扇区最小可用空域范围内,且是此空域内的最大值。
2)排序边相关参数
排序边的长度直接决定航空器路径延伸的最大幅度。根据广州区域管制中心范围内的间隔标准,综合考虑有无军航活动时落地航班的最小间隔变化,外排序边以极限空域构型的边界(图5 中灰色虚线)为确立依据,外排序边距离GYA 90 km,长度为99 km。内排序边距离GYA65km,长度为97km。内、外排序边间距为25 km,既能保证两条排序边上的航空器互无影响,又为管制员提供了一个测距标准,以协助管制员对航空器之间的水平间隔有一个直观且准确的判断。
在综合考虑了航路进港高度、过融合点高度、航空器下降剖面等要素后,确定排序边高度范围:内排序边使用6 300 m、6 600 m、6 900 m 3 个高度,外排序边使用6 000 m 及5 700 m(含)以下的高度。
通过设置排序边内高外低,不同进入高度的方式,来解决航空器在4 个方向融合过程中穿越排序边及直飞融合点过程中可能存在的冲突。
3)分离航线参数
以最早最快建立无影响平行航路为目的,在军航空域允许的狭小空间及限定高度上确立MUBEL 与ATLAT 两点设置的高度分离航线。因此,分离区设置在6 300 m 以上的空域,过MUBEL 以180°航向角飞行37 km,以及过ATLAT 以150°航向角飞行35 km,可与原航路快速建立大于25 km 的水平间隔。
4)其他参数
点融合飞行程序中涉及的各类转弯角度参数的设置参考了EUROCONTROL 的BADA 飞行性能数据及实际工作中的经验值,尽量避免航空器连续大角度转弯。此外,对于存在的大角度转弯,譬如两条排序边的最后定位点BY007 和PM005,已考虑航空器偏离航迹的可能性,类似定位点在设计时,距离扇区边界都留有一定距离。
速度控制也是点融合飞行程序设计中的重要一环。统一设置进入排序边前的速度270 kt,能够在不影响下降率的情况下,为后续直飞融合点过程中进一步调整至最小速度250 kt 提供裕度。
3 模拟运行及评估
根据现行飞行程序与点融合飞行程序建立相应的基准空域和仿真空域运行模型,前期采用雷达模拟机运行验证,考察优化方案的可行性。后期在对方案细节更加完善的基础上,进行了AirTOP 仿真验证,进一步验证了方案的有效性。
为考察大流量条件下点融合飞行程序与现行飞行程序的运行差异,以2019年春运(1月21日—3月1日)GYA 走廊口实际高峰小时的通行流量进行航班计划编排。雷达模拟机以春运GYA 走廊口落地广州航班流高峰15 min 和1 h 内的真实架次进行航班计划编排;AirTOP 仿真模拟中采用49 架次/h 的高峰数据,另外还增加了等待航线,解决排序边溢出的问题。
为便于考察管制员的工作负荷变化,假设AC4 与AC30 为一个整体管制扇区,在雷达模拟机上由一位管制员实施操作。在模拟环节,为简化仿真模型及运行环境,只有落地广州航班作为落地航班代表参与点融合,即默认目的地为广州的航班按点融合飞行程序飞行,其他目的地的落地航班按原有航路飞行。
3.1 进港效率评估
在雷达模拟机上进行多组模拟运行,随机选取两组数据,对比现行飞行程序与点融合飞行程序的航班流序列过GYA 的时间,如图6 所示,可以看到,相比现行航班流,点融合航班流整体用时更短,意味着对于同样的航班流量运用点融合飞行程序的效率更高。在实施点融合飞行程序的航班流中,第一个航班过GYA的时间比现行飞行程序领先近2 min,最后一个航班过GYA 的时间比现有飞行程序运行提前了10 min。经过统计,点融合飞行程序每小时进港架次提升了21%,进港总时间缩短13%,相比现行飞行程序进港总时间减少了14.8 min。总体来说,点融合飞行程序运行效率更高,落地航班流之间的间隔更紧密,能够避免时间空隙的较大浪费。
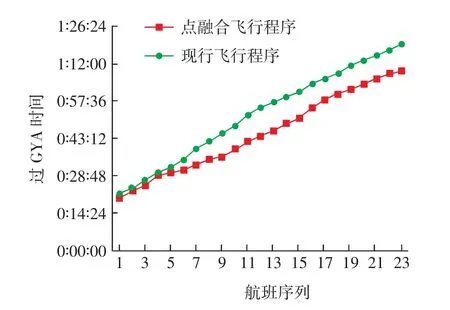
图6 现行飞行程序与点融合飞行程序的航班流对比Fig.6 Comparison of the flight flow between current procedure and point merge procedure
3.2 管制指令评估
从管制员在不同运行模式下的指令数量对比(表3)可以直观的看到,点融合飞行程序雷达引导和改变高度的指令数量显著减少,这意味着指令间的停顿时间有所增加,管制员监控飞行动态及思考的时间随之增加。特别需要指出的是,在现行飞行程序下,为缓解调配压力,管制员需要使用4 次盘旋等待策略,而在点融合飞行程序中则不需要使用等待策略,这突出显示了点融合飞行程序中排序边的路径延伸作用,证明了所设计排序边的数量和长度能够有效吸收延误。这也规避了雷达引导可能衍生出的潜在冲突,防止管制员精力的额外分散及消耗。
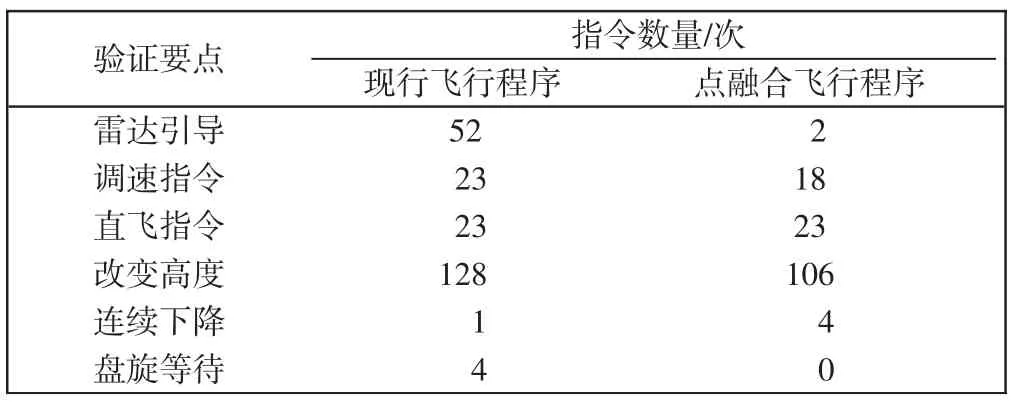
表3 现行飞行程序与点融合程序的指令数量对比Tab.3 Comparison of the number of manoeuver instructions between current procedure and point merge procedure
3.3 飞行航迹评估
飞行航迹评估在AirTOP 仿真模拟中进行,如图7所示。
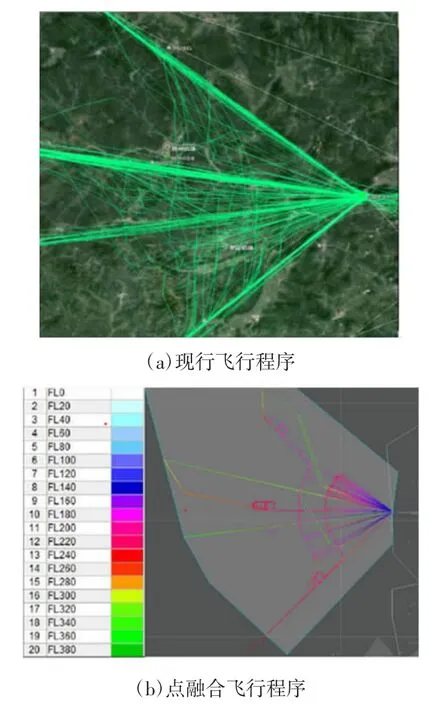
图7 飞行航迹分布对比Fig.7 Comparison of the distribution of flight trajectories
图7 中,飞行航迹分布直观地演示了现行飞行程序与点融合飞行程序之间的差异。从航空器飞行航迹分布情况来看:现行飞行程序航迹离散范围大、可预测性低、占有机动空间广;点融合方式进港的航班航迹分布更加简洁、秩序井然,在可预测性高的同时使用的空域资源更少,这与航空器大部分时间处于飞行管理系统(FMS,flight management system)控制,按照规划航线自动驾驶有关;点融合飞行程序可在极有限的空间里有效控制航迹,这对于空域有限的扇区整合航班流具有重要借鉴意义。
4 结语
从飞行员的角度来说,点融合飞行程序在运行方面具有良好的空地协同性,尤其是未来广播式自动相关监视(ADS-B,automatic dependent surveillance-broadcast)数据链广泛使用后,航空器之间的位置信息共享性更高,飞行员可以预知进港航迹,对于管制员的调配意图也更明晰。从管制员的角度出发,点融合飞行程序为其提供了一种全局化的视角,以更轻松、简单、高效的方式去建立及维持航空器在空中运行的秩序。综上,点融合航班程序可应用于区域进场扇区,且能有效提升进港航班流的效率,并作为监控空中态势的主体,为管制员提供全局兼结构化的技术支持。
不足之处在于未讨论天气系统及风对点融合飞行程序的运行影响,如冬季西风对航空器的速度调整不利,进而可能影响对航空器间隔的把控及点融合飞行程序的实施,将其作为未来的研究方向。
猜你喜欢
北京航空航天大学学报(2022年7期)2022-08-06
计算机技术与发展(2022年7期)2022-08-02
舰船科学技术(2022年11期)2022-07-15
舰船科学技术(2022年10期)2022-06-17
南北桥(2022年2期)2022-05-31
中国民航大学学报(2022年2期)2022-05-28
雷达科学与技术(2020年4期)2020-09-11
计算机技术与发展(2020年2期)2020-04-15
科技与创新(2018年11期)2018-11-29
电脑知识与技术·经验技巧(2017年9期)2018-02-24
