
基于单目摄像头的FCWS测试与评价
2021-09-22 14:54冯赞
专用汽车 2021年9期
冯赞
招商局检测车辆技术研究院有限公司 重庆 401122
长途客运车辆、旅游客车及危险物品运输车辆发生交通事故危害性不言而喻,道路运输车辆的行驶安全性越来越受到重视[1]。智能视频监控终端应运而生,其搭载的LDW及FCWS系统能及时向驾驶员发出车道偏离预警和前向碰撞预警,有效减少事故的发生率[2-3]。FCWS系统的结构型式多种多样,包括单目摄像头型式、双目摄像头型式、摄像头+雷达型式等,部分系统采用双雷达型式[4-5]。其中单目摄像头型式的FCWS系统相较于毫米波雷达型式的FCWS系统性价比高,近距识别率高,使用范围更广,市场占有率更高。不过单目摄像头型式的FCWS系统也存在环境适应性差、识别效率相对低、算法较为复杂等缺点。
本文筛选10套具有代表性的基于单目摄像头的FCWS系统,按照相同的试验方法,对终端的FCWS性能进行评价分析,探讨目前市面上主流FCWS系统供应商的大体水平,提出一种新的性能评定指标,为标准的修订提供一定的数据及理论支撑。
1 基于单目摄像头的FCWS工作原理
单目摄像头式的FCWS相对摄像头与雷达融合的FCWS而言,成本更低,但也存在算法更为复杂、环境适应能力更弱的缺点。同时,其对前方目标的识别仅依靠位于前挡风玻璃下沿的ADAS摄像头,对目标的识别效率也受一定影响。单目摄像头式的FCWS主要采用深度学习网络设计与模型压缩技术、距离目标检测与精准定位技术、亚像素级目标跟踪技术、图像处理技术等进行目标识别。图1为单目摄像头式的FCWS功能架构。整个系统可分别感知层、决策层和执行层,感知层利用单目摄像头对环境进行感知,并将图像信息传输至决策层,决策层通过图像处理与分析,实时分析出前方目标相对自车的相对距离、速度及车道等信息,向执行层发出报警指令,对驾驶员进行预警。
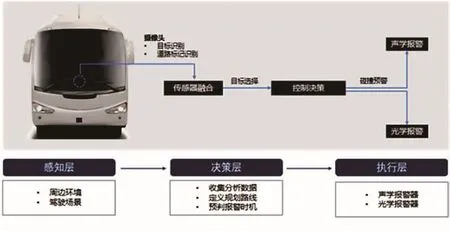
图1 FCWS功能架构图
2 FCWS性能测试评价方法
本文参照JT/T 883-2014《营运车辆行驶危险预警系统技术要求和试验方法》[6]中的试验方法,将10组测试样品安装在营运客车内,测试FCWS分别在前方目标车辆静止、前方目标车辆移动和前方目标车辆制动的情况下的预警情况。预警时间(简称TTC),其阈值由车速和目标车辆的运动状态决定。因此,目标探测距离的准确性对预警时间的稳定性、准确性有很大的影响。
2.1 测试设备、场地
为保证测试结果的准确性及可行度,在重庆机动车强检试验场进行FCWS测试,采用英国ABD驾驶机器人、英国OXTS RT惯性组合导航系统、高精度定位基站、Euro-NCAP认证的目标假车等设备。试验场地为重庆机动车强检试验场的制动路(一段约1 km的长直沥青路面)、如图2所示。

图2 前撞预警测试场景
2.2 FCWS测试场景
2.2.1 前方目标车辆静止场景
前方目标车辆静止场景中,被测样车在150 m以外,以(72±1.6) km/h的车速驶向静置于车道中央的气球假车,样车与气球假车的车身纵向轴线间隔不超过0.6 m。FCWS的TTC应大于2.7 s。
不同厂家生产的1 0款基于单目摄像头的FCWS系统进行前方目标车辆静止场景下的FCWS性能比对试验后,所得测试结果见图3及表1。

图3 前方目标车辆静止场景测试结果对比图
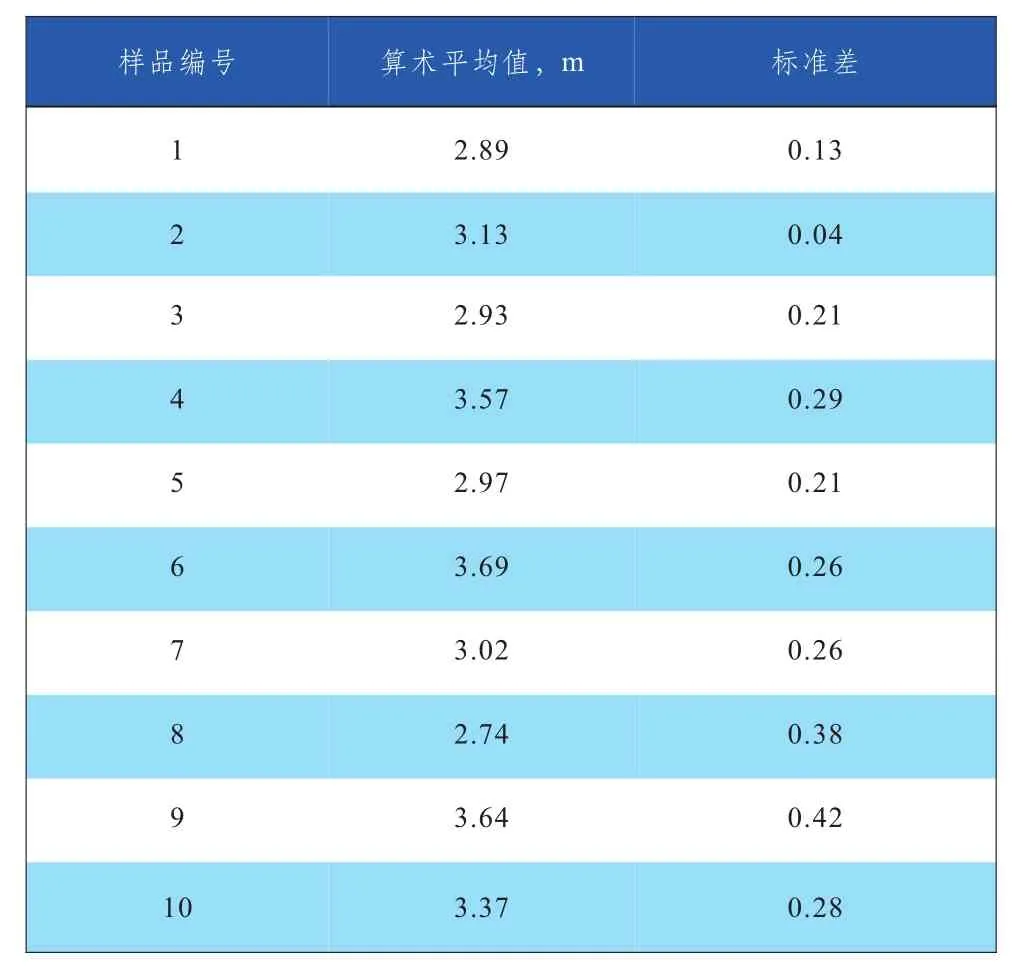
表1 前方目标车辆静止场景的测试结果
由试验结果可知,测试样品的稳定性普遍不高,离散性较强,TTC在2.59~4.10 s间变动,但主要在2.7~4.0 s之间。从表1分析得出,第二组样品的TTC标准差最小,测试样品的稳定性最优。对前方目标车辆静止场景中的所有试验结果求平均,10组样品的TTC均值为3.26 s。
2.2.2 前方目标车辆移动场景
前方目标车辆移动场景中,被测样车在 150 m以外,以(72±1.6) km/h的车速驶向以32 km/h速度移动的气球假车,样车与气球假车的车身纵向轴线间隔不超过0.6 m。FCWS的TTC应大于2.1 s,见图4和表2。

表2 前方目标车辆移动场景的测试结果
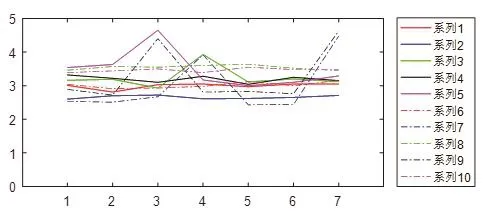
图4 前方目标车辆移动场景测试结果对比图
该情景下的试验结果与前方目标车辆静止场景的测试结果相差不大,TTC分布在2.65~4.63 s之间。其中,第二组样品的标准差最小,稳定性同样最优。该场景中,10组样品的7次测试结果的算术平均值为3.19 s。将测试结果与前方目标车辆静止场景的测试结果对比,不难发现,在前方目标车辆静止场景测试中的标准差小的样品,在前方目标车辆移动场景中的标准差也较小,两场景的测试结果成正相关。
2.2.3 前方目标车辆制动场景
前方目标车辆制动场景中,被测样车在150 m以外,以(72±1.6) km/h的车速驶向以(72±1.6) km/h速度移动的气球假车,样车与气球假车的相对距离保持(30±1.5) m,气球假车以(0.3±0.03) g的减速度制动,样车与气球假车的初始速度之差不超过1.6 km/h,样车与气球假车的车身纵向轴线间隔不超过0.6 m。FCWS的TTC应大于2.4 s,见图5和表3。

图5 前方目标车辆制动场景测试结果对比图
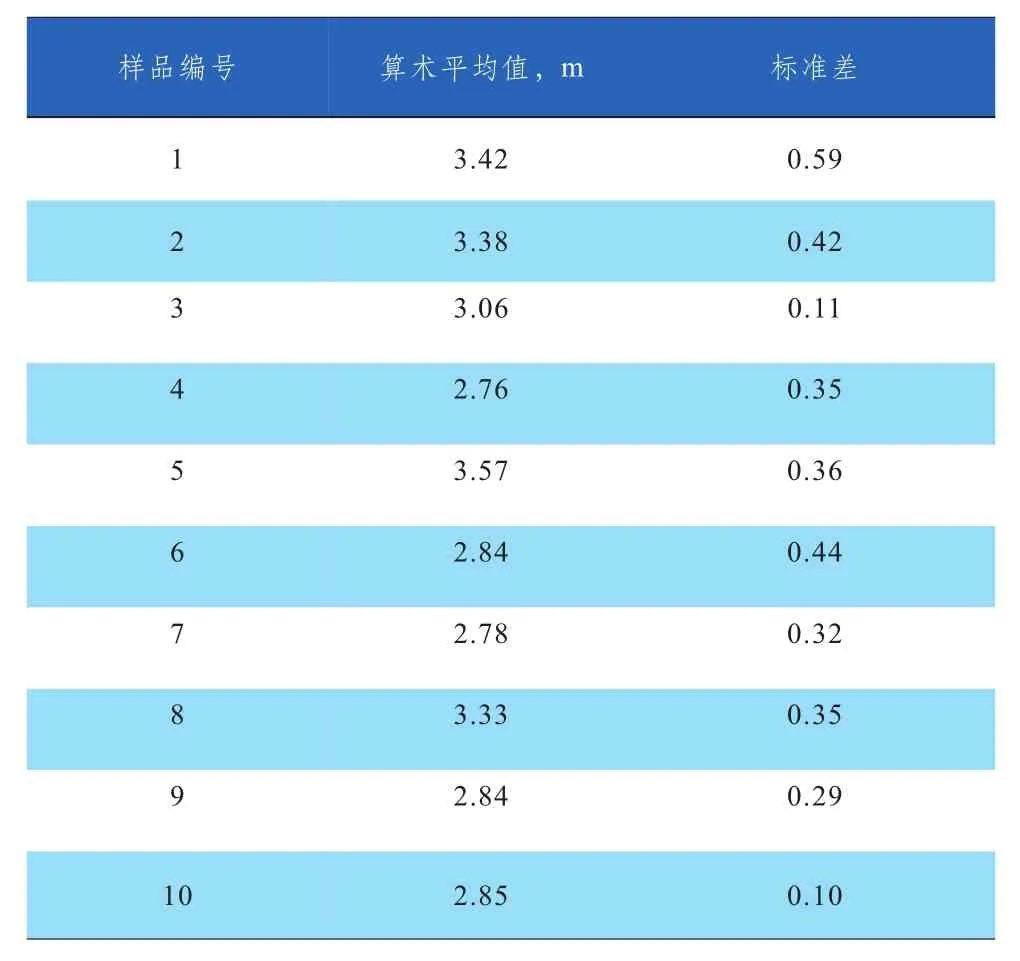
表3 前方目标车辆制动场景测试结果
由表3可知,第二组样品的标准差最小,样品的预警稳定性同样最优。该场景中,10组样品的7次测试结果的算术平均值为3.03 s。将三种场景下的测试结果进行比对发现,前方车辆制动场景中的测试结果与另外两场景的标准差不存在正相关的关系。结合测试场景,不难分析其中原因,在前方车辆制动场景中,前车突然减速制动,前后车不仅相对距离迅速减小,相对速度也有所增加。相较于另外两个场景,前方车辆制动场景对FCWS要求更高,测试条件更为严苛。若FCWS硬件数据采集和传输、芯片的运算不及时,算法的合理性欠佳等,FCWS产生报警的时间都会受到影响。
2.3 FCWS性能测试分析与评价
TTC的阈值由车速和目标车辆的运动状态决定,因此,目标探测距离的准确性对预警时间的稳定性、准确性有很大的影响。通过横向比对,在车辆行驶时,摄像头容易受车辆的颠簸出现抖动,对视频画面产生一定影响,从而影响FCWS对目标相对距离的识别,使得TTC小幅波动,若将报警阈值设置在2.7 s附近,容易出现报警时间小于2.7 s的问题,反之,若将报警阈值设置在4.0 s附近,FCWS系统预警时间更早,但同时也容易出现误触发的情况,影响驾驶员的正常驾驶。综上所述,将TTC设置在2.7~4.0 s之间的某个合理数值,既可以避免因摄像头抖动而产生的TTC波动的情况,也能避免FCWS系统误触发的情况。将10组FCW系统的测试结果的算术平均值作为报警阈值,单目摄像头型式的终端能有效规避摄像头抖动等异常情况导致TTC的波动较大的问题,可适用更多复杂范围。
大部分研究者采用标准差来衡量FCWS设备报警的稳定性[7-8],标准差能反映一个数据集的离散程度,可体现FCWS报警时机稳定性的好坏,但并不能体现报警时机是否满足要求。
结合上述分析,本文拟基于10组样品测试结果的算术平均值,设置新的指标,以表征样品性能的优劣,即试验结果与所有样本试验结果均值的相关性 a来判别设备的优良,具体公式如下:

式中,D为某情景中所有测试样品的TTC均值;xn为某情景下测试样品的第n次测试的TTC。
相关性a考虑了样本的离散程度及样本与总体均值的差异,综合体现所测样品预警时间的稳定性及合理性。
由表4可知,前方目标车辆静止场景中,第二组样品与均值的相关性最优。同时,由表1可知,第二组样品的标准差是10组中的最小者,且其次测试结果算术平均值也与10组样品测试结果均值相近,这两点印证了相关性评价的可靠性,说明相关性这一指标不仅能反映样本的离散性,也能反映样本与均值的接近程度。所以,第二组样品拥有更优的预警稳定性及预警时间的合理性。

表4 各组样品在三种场景下的测试结果
同理,前方目标车辆移动场景中,第四组样品与均值的相关性最优,在此场景中,该样品的预警稳定性及预警时间的合理性最优。前方目标车辆制动场景中,第三组样品与均值的相关性最优,在此场景中,该样品的预警稳定性及预警时间的合理性最优。
3 结语
本文将10组基于单目摄像头的FCWS系统进行了横向对比测试,基于测试数据,分析了FCWS系统在不同测试场景下出现不同测试结果的原因,同时提出了新的性能评价指标,为JT/T 883-2014 标准的修订提供了新的思路。
猜你喜欢
中国交通信息化(2022年9期)2022-10-28
包装工程(2022年1期)2022-01-26
汽车工程师(2021年12期)2022-01-18
意林原创版(2021年7期)2021-08-03
中国食品(2020年9期)2020-05-26
中小企业管理与科技·下旬刊(2019年3期)2019-07-08
食品安全导刊(2017年12期)2018-01-04
食品界(2017年7期)2017-08-24
小说月刊(2014年11期)2014-04-18
网络与信息(2009年6期)2009-07-31
