工业机器人虚拟仿真系统集成开发
2021-09-18 19:51甘路
品牌与标准化 2021年5期
关键词:工业机器人


【摘要】 为了结合广西生产企业自动化改造升级发展,文中围绕机器人糖包自动分拣码垛等轻工生产企业自动化改造提取和开发教学资源,将企业实践过程转化到一体化课程的六步法进行阐述,指导学生能够在一体化教学中学习机器人系统集成项目,掌握紧贴工业自动化行业技术发展的知识和技能。
【关键词】 工业机器人;自动分拣作业;仿真模型
【DOI编码】 10.3969/j.issn.1674-4977.2021.05.043
Integrated Development Course of Industrial Robot Virtual Simulation System
GAN Lu
(Guangxi Light Industry Technician College,Nanning 530031,China)
Abstract: In order to combine the automation transformation and upgrading development of Guangxi production enterprises, this paper focuses on the extraction and development of teaching resources for the automation transformation of light industry production enterprises, such as the automatic sorting and palletizing of robot sugar packets, and describes the six step method of transforming the enterprise practice process into the integrated curriculum, so as to guide students to learn the robot system integration project in the integrated teaching, Master the knowledge and skills closely related to the technical development of industrial automation industry.
Key words: industrial robot;automatic sorting operation;simulation model
随着智能制造技术的发展,生产企业逐步引入工业机器人进行自动化集成系统升级改造,通过对广西制糖、造纸等轻工类生产企业调研,结合制糖行业机器人系统集成项目,开发基于虚拟仿真环境的工业机器人系统集成设计课程,引入一体化教学模式,探索在模拟仿真企业情景中完成机器人系统集成设计的工学结合一体化教学。
1 开发的意义
目前国内工业机器人技术应用领域的项目更新日新月异,对比广西机器人系统集成应用的发展现状,如果还是按照固定的机器人系统实操项目来开展教学,已经很难适应机器人行业的发展。而且职业院校机器人系统集成设计实训设备的采购成本非常高,不利于机器人系统集成技术的应用和教学。因此开发一套与企业现场实际应用相结合的机器人虚拟仿真系统及一体化教学资源,不但能够节约成本,还具有技术创新性。“虚实”结合用于教学,实现虚拟学习、实践教学与现场应用的“三位一体”无缝连接,对于培养适应机器人系统集成应用的专业人才具有重要的意义和实用价值。
2 典型工作任务的提取
深入广西丰林木业有限公司、广西南南铝加工有限公司、南宁糖业香山糖厂、贵糖集团等区内多家生产企业,重点考察基于工业机器人的自动化生产线改造项目,提取到企业典型工作任务4个,其中制糖企业基于工业机器人的自动化分拣码垛生产线是广西区内机器人系统集成应用最具普遍性的工作任务。
针对糖厂工业机器人自动分揀码垛自动化改造项目,利用机器人视觉识别糖包大小、摆放方位、传送带实时速度等参数,通过工业机器人抓取物品,然后放到码垛平台,实现货物快速、不间断分拣、码垛的过程(见图1)。在典型任务中,上承自动传送带,下接码垛打包平台、自动导引传送带分拣作业。在企业实践中,识别分拣的速率和正确率直接影响生产的效能和节拍,并间接影响企业自动化生产效率。因此,让学生掌握好工业机器人自动分拣码垛自动化改造项目这一典型工作案例具有重要意义。
开展企业调研的过程中,对南宁糖业集团香山糖厂使用的机器人分拣码垛生产线技术改造项目的各项设备及性能指标逐项记录及分析,该项目采用的是FANAC M-410型机器人,具备全自动传送、糖包识别、机器人抓取、计包测量、自动倒袋、自动码垛作业、自动编码打印、自动装车等功能,代替传统的人工包装、搬运及码垛作业,有效降低码垛工人的劳动强度,提升企业生产效率,减少劳动成本。根据香山糖厂实际生产线情况,设计工业机器人自动包装码垛典型工作任务,并对生产线系统进行自动化控制及仿真,典型工作任务能为工业机器人系统集成课程提供辅助理解与参数调试操作,大大减少职业院校机器人专业投入的时间与成本,针对目前职业院校ABB工业机器人实训典型工作站和企业机器人自动化改造项目,集成六轴机器人、高速并联机器人、双臂人形机器人等设备,有利于工业机器人专业开展基于虚拟仿真环境的工业机器人系统集成课程。
3 教学资源的开发及转化
通过广西南宁糖业香山糖厂机器人分拣码垛生产线项目,总体结构为4条机器人码垛生产线汇入1条机器人装车输送线,由码垛机器人完成码垛作业。在典型工作任务中,一号汇线输送机的糖包、二号汇线输送机的糖包之间的逻辑控制组态,可避免糖包冲突叠加,引起程序错误或码垛机器人意外损坏。我们在机器人仿真任务的机器人程序编写中,要根据企业实际编写开发机器人程序,但首先要厘清典型工作任务中的控制逻辑。
3.1 控制逻辑设计
香山糖厂成品自动化码垛生产线一共有4条码垛输送机,其中2条输送带糖包同时启动汇线,为避免糖包重叠的现象导致机器误操作现象,需要对码垛生产线控制逻辑时序进行设计。
逻辑控制组态:
1)码垛输送线复位后,优先检测一号汇线输送机是否输送糖包信号反馈,若有执行汇线动作输入信号,码垛输送线可屏蔽停止信号,继续等待糖包输送信号。
2)检测二号汇线输送机有输送信号反馈,判断一号汇线输送机汇线糖包先到,一号汇线输送机可优先执行系统汇线启动,同时控制码垛输送线后段输送机全部停止,逻辑等待汇线完成。
3)判断一二号输送机糖包同时到达,则可执行码垛输送线汇线的机器人码垛工作。两边汇线输送机也进行同样的逻辑算法判断。最后码垛输送线按顺序执行至码垛机器人,并执行码垛作业。
制糖业是24小时生产连续性的企业,机器人码垛生产线在系统集成设计时就必须考虑多台糖包装车运输线与多台码垛机器人之间的生产效率的关系。为达到更高效的工作效率,其根本原则是码垛机器人生产节拍略大于装车运输线生产的节拍。按照逻辑时序,基于机器人的自动包装码垛生产线系统设计的系统各逻辑功能必须满足技术参数才能保证控制执行的合理、时序、效率。
3.2 一体化教学资源的转化
1)基于机器人虚拟仿真环境的工业機器人系统集成设计课程的典型工作任务,能够根据机器人程序中的控制逻辑和指令,利用机器人自动化生产线的逻辑控制时序、数据模拟信号来模拟自动化产环境,进行三维控制,开展设备运行参数调试和执行操作任务。机器人仿真系统内部数据与PLC控制系统数据的传输,输入输出信号的指令接收和发送下一步位的数据建造,能够快速有效地形成一个模拟环境机器人控制系统,实现企业实际工作任务和仿真环境之间的有效对接。机器人在模拟仿真环境下,能够打开身体内部的数据连接和网络对接实现智能化模拟工程运作,完成信息的交换,交流(见图2)。
2)基于机器人虚拟仿真环境的工业机器人系统集成设计课程的一体化教学工作页,包括实操工作手册和过程任务单两部分。工作手册包含学生完成工作任务需要的知识内容,用于学生自主收集和学习相关知识。任务实施引导是根据过程任务单开展,过程以教学资源为基础进行编写,每个工作任务的任务单包含工作布置、课前信息查询、工作计划制订、实施过程记录与思考、检查内容及记录、过程评价、任务思考和创新。
3.3 一体化教学及仿真教学开展网络教学的探索研究
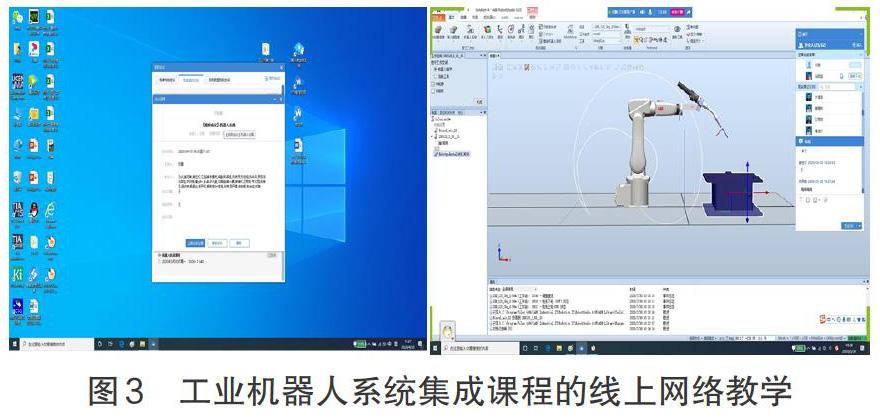
通过一年多的课程资源开发和线上下结合的课程实践,基于工业机器人糖包自动分拣码垛等轻工企业自动化改造一体化教学资源的开发和探索,从机器人糖包分拣码垛真实场景到工学一体化课程的转化,能够引导学生在仿真教学资源中熟悉机器人系统集成项目,掌握紧贴工业自动化行业技术发展的知识和技能。师生可根据课程框架和一体化教学工作页(见图3),并运机器人系统集成虚拟仿真系统,以教学资源单为引导,探索工学结合一体化教学方式方法,强化教学实践。
4 结语
本课题以基于虚拟仿真环境的工业机器人系统集成课程一体化教学资源开发,模拟企业实际自动化生产改造应用中仿真操作和作业效果,结合工业机器人控制算法核心控制和逻辑时序,形成针对工业机器人专业系统集成课程的“真实、仿真、调试、控制”的一体化教学模式。我们计划将教学资源下一步的应用环境能够增加机器人焊接、生产组装、搬运、视觉识别与多机协同作业等,学生可以在虚拟环境中调试程序,又可在真实平台下感受实际应用中工业机器人集成设计开发的流程,对于提高机器人系统集成应用课程的一体化教学质量及机器人专业人才培养具有重要价值和意义。
【参考文献】
[1] 张姣.虚实结合的工业机器人实验室建设探索与实践[J].南方农机,2021(13):160-161.
[2] 周佳杰,肖莉莉.高职院校工业机器人虚拟仿真实训室建设[J].中阿科技论坛(中英文),2021(6):158-160.
[3] 陈磊,张建荣,郭金妹.基于高职院校的工业机器人虚拟仿真实训课程的开发研究[J].科技与创新,2021(1):37-39.
【作者简介】
甘路,男,1984年出生,讲师,学士,研究方向为工业机器人应用技术,生产过程自动化。
猜你喜欢
中国科技纵横(2016年20期)2016-12-28
科技创新与应用(2016年34期)2016-12-23
青春岁月(2016年22期)2016-12-23
汽车科技(2016年6期)2016-12-19
科技创新导报(2016年21期)2016-12-17
中小企业管理与科技·下旬刊(2016年10期)2016-11-18
科技视界(2016年18期)2016-11-03
企业导报(2016年13期)2016-07-19
科技视界(2016年15期)2016-06-30
成才之路(2016年4期)2016-03-23