基于物联网的在场化社交设计在可持续交互中的应用
2021-09-11 10:04:28北京林业大学艺术设计学院
创意与设计 2021年4期
文/李 健(北京林业大学 艺术设计学院)
面向可持续行为设计(Design for Sustainable Behavior,DfSB)[1]是 英 国拉夫堡大学学者提出的研究课题,DfSB关注利用设计干预并塑造用户行为,以减少使用与消费行为对生态环境带来的压力与破坏。其中,社交是一种重要的行为干预策略,但由于环境行为在日常生活中随机发生,且对行动情境的强依赖性,传统线上社交的设计效果很难和用户线下的行动随时保持同步,持续地发挥干预作用[2]。物联网(IoT)技术的发展让研究者构想出许多整合线上社交与线下行为的设计场景,且有效地与社会心理学理论对接应用于DfSB社交设计。
一、社交在场理论下的Io T设计
1.1 IoT与DfS B社交设计
不同于手机高度个人化、私人化的设备属性,IoT技术产品常以日常物品的形态置于家庭或办公环境,具有天然的公共属性。它所特有的空间性和物质性的在场形式能跨越线上线下的社交场景,避免依赖于屏幕的社交平台带来的局限[3],为媒介化社交创造更多的机会。许多DfSB项目都尝试利用IoT技术建立适应线上、线下不同场景的社交激励推动环保行为,打破环保行为的私域性。例如,Thieme等[4]设计了可对箱内垃圾拍照并识别垃圾类型的智能垃圾桶,照片上传到社交网络,引发用户与其社交圈子对垃圾问题的关注和讨论。Lessel等[5]使用协作任务的设计方法,通过社交合作对智能垃圾桶上传的垃圾照片分类,提高用户的垃圾分类知识。Lim等[6]针对食物浪费行为提出一个名为“社交菜谱”的IoT系统原型,它利用厨房中的智能冰箱和垃圾桶追踪用户不同的食材消耗,并分析出最可能被浪费的食材。根据这些信息通过讨论组向用户推送菜谱,鼓励用户减少食物浪费。以上这些项目都在一定程度上结合了用户线上社交与线下行动,线上社交平台所使用的数据来自于传感器实际探测到的行为频率、幅度、时间等信息,部分反映了行动状态,但传统社交网络仍然在这些设计中占据社交中枢的位置。
Atzori等[7]提出了 “社交化物联网”(social IoT,SIoT)的概念,将IoT网络下人与人、人与物,以及物与物之间的关系强度作为评估IoT社会联系的准绳。SIoT的“社交性”可划分为多个阶段。初级的SIoT还需依赖传统的社交网络,智能设备的作用是获取用户数据上传到社交平台。上述DfSB项目多处于这个阶段,物联网与社会网络不论在技术上还是使用场景上的界限并未真正打通。Atzori将具有更高社交性的IoT产品称为“行动设备”,它取消了社交平台的中心地位,将社交重新嵌入到用户去中心、扁平化的行动网络中。
1.2 社交在场
“社交在场”概念有助于深入理解SIoT的行动设备中“社交性”含义。社交在场来自于物理环境下面对面的社交形式,后被引入到媒介化的社会互动研究中。它表示互动者在媒介化交流中被感知为“现实之人”的程度[8],强调的是社交体验中的亲密感与直接性[9],非语言性的互动、暗示性信息、双方彼此物质性感知是产生社交在场感的要素[10]。上述概念反映了社交在场与信息论范式下社交的区别,同时也勾勒出SIoT行动设备“社交性”特有性质。传统社交媒介的设计注重信息流通的效率和准确性,而交流双方的情感联系以及对社会交往本身的真实感是SIoT行动设备对“社交性”评估的基准。这种真实感并非意图复原面对面交流,而是来自于交流双方能切实感受到对方作为独立社会个体的复杂性呈现,并对所在的互动情境产生共享性的社交体验。Biocca[11]将媒介化在场分为对共在场的感知、心理上的卷入,以及行动上的相互卷入3个层次。基于这一分析,他们提出社交在场技术的3个形式: (1)感知支持:感知到他人与自己直接地共在此处的状态; (2)主观支持:觉得能够与他人的行动和情绪产生互动; (3)主体间交互支持:能够感受到对方对彼此共在场的感受[12]。这一定义对基于IoT的DfSB社交设计与评估提供了基础。
二、DfS B社交设计思维模型
基于已有研究,本文所提出的社交设计思维模型借助IoT的社交性将Biocca社会在场的3个层次具体化,鼓励用户将环境行为以及对环境行为的关注带入社会互动。这一思维模型包含3个促进社会互动的设计元素:远程在场、行动交流与协商空间。
2.1 远程在场
远程在场将社交在场作为一种远程的、由技术媒介连接的社会维系状态。社交双方虽处于不同物理空间,但将彼此的信息投射到对方的IoT设备上。智能设备通过传感器持续地跟踪用户行动,并将这些行动转换为可被接收者察觉的信息。远程在场从感知层面调动对他人的社交关注,IoT允许这些信息仅在生活背景发挥作用,在必要时以不打断用户手头工作的前提下暗示对方在场,用户通过“余光”即可意识到这种社会联系。
2.2 行动交流
行动交流表示用户将自己日常生活作为社交粘合剂构建或保持集体性共识[13]。在这种社交模式下,IoT将用户围绕它发生的日常行为、生活事件作为社交资源,用户交流的载体不是文字信息,而是对物品的 “拥有”“使用” “回收”等应用行为本身。行动交流不仅停留于感知层面,它要求用户必须有所从事性,如投入一定的行动或实施某些任务才能完成一次社交互动,类似于社会在场的心理与行动卷入层次。
2.3 协商空间
协 商 空 间 是 “存 念 设 计”(mindful design)[14]的一种衍生形式,设计目的是在产品的使用方式与用户预期使用方式之间建立社会化的反差,用户需要摒弃已有的习惯思维,反思性地使用产品。在协商空间中,这种反差体现为面对同一行动目标,由于双方行动状态、方式和环境的不同而产生的行动差异。合理地控制协商空间的社交张力不仅能延长互动的进程,同时也能引起用户对自身习以为常的行为反思,带给用户对个人化行为选择与环境诉求之间关系新的理解。这一设计元素接近社会化在场的主体间支持层次。
2.4 思维模型的运行机制与设计任务
图1 显示了思维模型的运行机制和6个设计任务。基于社交在场理论,在场感是DfSB社交开展的基础。远程在场向本地用户显示远程行动者使用智能产品执行环保行为的状态。IoT利用传感器、云端数据库等技术获取用户的行动数据,对这些数据二次加工后,在本地智能设备上呈现。这一阶段的设计任务是选取有代表性的环境行为数据(任务1),并将数据处理为易于接受的感知信息(任务2)。一旦本地用户对远程在场信息做出行动上的回应,就进入到行动交流进程。将智能产品作为行动交流的终端,设计不仅要考虑本地用户使用这些产品的行为特征(任务3),还要为互动双方对远程设备的操控留出空间,刺激用户的互动行为(任务4)。远程在场与行动交流是触发社交发生的2个行动片段,协商空间的作用是将二者组织为连贯的、可持续的社交进程,以此达到主体间的双向支持。设计要为用户提供持续开放的社交界面充分获取行动数据(任务5),为双方建立共同的环保目标,以及将行动数据与环保目标绑定的规则(任务6)。以上6个设计任务将抽象的思维模型转化为问题导向的设计工作,有助于在设计实践中把握此模型。
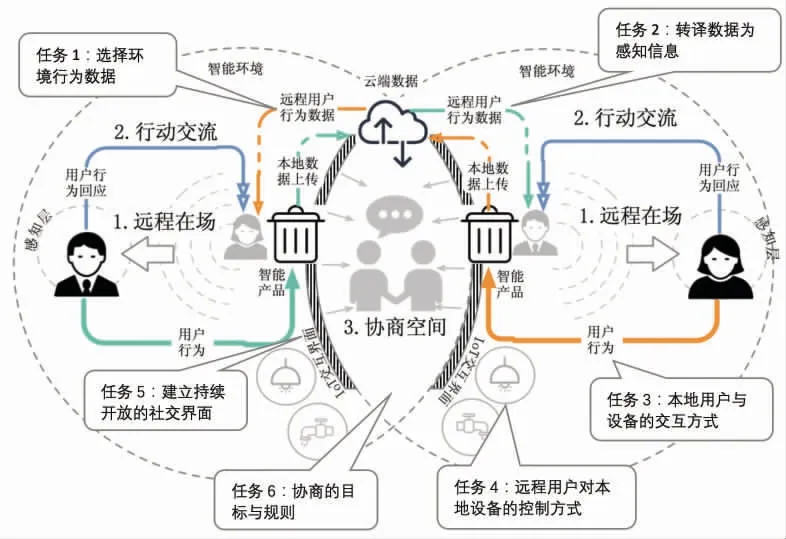
图1 思维模型与设计任务
三、基于Io T的DfS B社交设计实践
设计实践以环保行为作为设计主题,探索利用IoT促进用户在垃圾处理上展开社交互动,同时引发用户对环保行为的反思性的关注。设计产出名为“箱伴”的智能垃圾箱原型。产品形式上以IoT作为基本的技术框架,基于上述社交模型在远程配对用户间构建社交关系(见图2)。
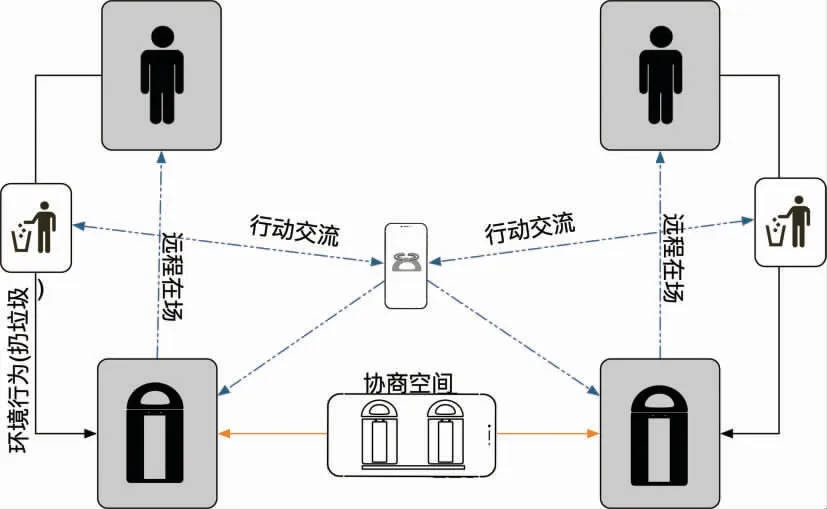
图2 3个设计元素在项目中的应用
3.1 远程在场设计实现
双方用户均设置了智能垃圾箱以及配套App,智能垃圾箱安装ESP模块直接与云端和App进行数据交换(见图3)。垃圾箱投掷口下方安装了红外线和超声波传感器,能识别用户在垃圾箱附近停留和活动行为。箱体内设置了压力传感器获取箱内垃圾的重量变化。当两类数据同时发生变化可以判断用户是否靠近箱体并投入了垃圾(模型中的设计任务1)。在产品的使用上,用户不需要对系统进行额外学习,仅需日常经验即可完成扔垃圾行为(任务3)。“扔垃圾”的行动数据实时地经由云端被远程配对的智能垃圾箱获取。信号传达后会触发箱体上的LED灯以舒缓的渐亮渐暗的方式闪烁,提醒用户对方可能正在投放垃圾(任务2)。借助这种背景化和暗示性的反馈,在合作用户双方建立持续性的“远程在场”社会联系感(任务5)。
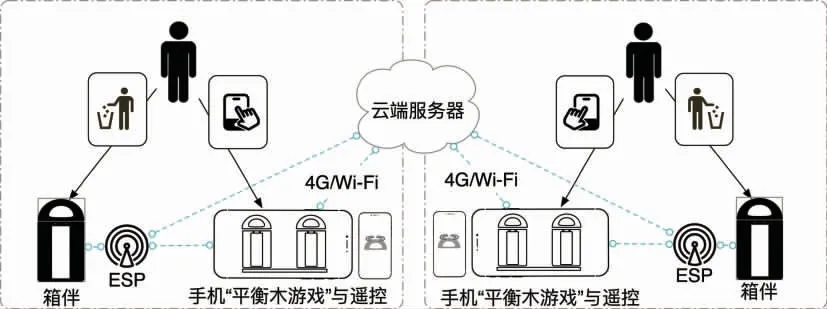
图3 系统结构
3.2 行动交流的设计实现
“行动交流”部分以鼓励用户更加主动地控制垃圾量为目标。这种交流通过测量垃圾重量,和由制动器牵动垃圾箱投入口做出类似“摇头”的旋转动作实现(见图4)。垃圾箱每收到一次行动数据后,会与本地箱内垃圾重量比较。双方垃圾重量相差越大,表示同步的效果越差。系统允许环保成果更好的用户有优先“话语权”,这体现在垃圾量较少的一方能够暂时性地获取对方投入口旋转的控制权(任务4、任务6)。例如,垃圾量较少的用户通过LED灯的闪烁判断对方可能正在扔垃圾,她可利用手机App向远程垃圾箱发出信号,让对方垃圾箱投入口左右旋转,产生拟人化的“摇头”动作。设计上,箱口旋转较为平缓,并不会给扔垃圾行为造成障碍,实际目的在于激发对方去解读“摇头”这一动作中所暗示的不满、提醒、劝说等不同的态度(任务2)。合作双方以这种方式彼此监督,保持环保行动的同步。

图4 智能垃圾箱设计预想图、结构图、低保真原型与高保真原型
3.3 协商空间设计实现
配套App提供了一款结合垃圾箱使用的小游戏“平衡垃圾箱” (见图5)。平衡木两头垃圾箱的重量来自于“箱伴”实测的箱内垃圾重量。游戏目的要求双方保持箱内垃圾重量基本持平,否则当一端垃圾过多,平衡的状态将被打破,导致2个垃圾箱全部倾倒(任务6)。用户双方因此需随时关注对方的实际垃圾产量(任务5),并尽可能与对方保持一致。“平衡游戏”的隐喻化设计让用户意识到社交合作不是要求伙伴无条件地配合自己,而是要承认和接受双方行动情境的差异,这也是“协商空间”所传达的设计理念。

图5 “平衡垃圾箱”游戏界面
“箱伴”的社交设计与传统的在线社交从社交理念、社交方式,以及所引发的社交体验上都有很大差异。“远程在场”所建立的开放通道既让用户在环保行动中感受到社会伴随感,也为观察和理解任务伙伴的行为模式,考虑如何与对方行动同步提供条件。“行动交流”将2个不同地理位置的用户邀请到同一个扔垃圾的行动情境,并使扔垃圾这种日常生活中的“小行为”本身成为这一情境的行动核心。隐喻化的“平衡垃圾箱”则让用户打破“扔垃圾”个人化、私域化的行动性质,在执行这一行动的同时必须考虑他人的行动方式。此外,箱伴的设计也努力模糊线上社交与线下行动之间的界限,社交不需要输入和识别大量的文字和图片信息,实质的交流就发生在围绕智能垃圾箱展开的“扔垃圾行为”上。
四、设计测试
“箱伴”的设计体现了IoT技术下3个设计元素在DfSB社交设计中的应用,以及6个设计任务的执行方式。为了验证该设计是否能增强用户的社交在场感,以及相对于传统的线上社交是否有助于提升环境行为意愿,测试使用随机对照组的方法进行定量分析。
4.1 测试过程
测试环节设置了3个实验条件。控制条件为DfSB设计中常规的社交比较方法[15],被试投入垃圾后通过手机看到当前箱内垃圾量,并在模拟的社交排名中显示其位置。该条件反映了线上社交的社交效果,作为和在场化社交进行比较的实验基线,所有实验组都会执行。实验条件1测试远程在场部分的设计元素,被试通过智能垃圾箱感知配对用户的扔垃圾信息,并向对方做出回应。实验条件2包含远程在场、行动交流与协商空间3个设计元素。被试使用App与配对用户在游戏中进行协作,远程感知对方扔垃圾行为,并使用遥控功能控制对方的垃圾投入口旋转。
测试共招募了80位参与者,并被随机分为3组。控制组(A组)仅执行控制条件的操作,2个实验组分别执行实验条件1(B组)与实验条件2(C组)的操作。测试期间,研究者首先向实验组的被试介绍原型的使用方法。然后被试与处于另外房间的研究者共同完成模拟扔垃圾的合作任务。B组提供智能垃圾箱的高保真原型和装有社交排名App的手机,C组配备B组的测试设备,同时还提供了平衡木游戏App。测试结束后,被试填写后测量表,包括调整过的社会在场量表[16](Cronbach α=0.862),用于测量被试对社交在场的感知,该部分问卷为7点量表,从完全同意到完全不同意编码为1~7;产品采用意愿量表与环境行为意愿量表用于了解用户对产品兴趣是否与社会在场有关,以及此设计在多大程度上能对环境行为产生影响。分组变量与产品采用意愿作为自变量,因变量包括在场感知、心理卷入、行为卷入、环境行为意愿。
4.2 测试结果
4.2.1 社交在场 社交在场包括在场感知、心理卷入与行动卷入3个变量,使用了单因素多元方差分析(MANOVA)及多重比较。测试结果整体上显著(wilks lambada=0.714,统计结果显示,不同实验组在在场感知 (F=7.49,P<0.001)、心理卷入(F=6.72,P=0.002)、行动卷入(F=4.81,P=0.01)上差异均显著。事后多重比较结果表明,对于在场感知、心理卷入、行动卷入等变量,C组与A组,B组均有显著差异,但A组与B组之间无差异。
由于社交在场在事后比较中没有发现远程在场实验条件(B组)与控制条件(A组)之间存在差异,在场感知被分为自我在场与他人在场2个变量分别进行分析。多元方差模型3个实验条件上的差异整体显著(wilks自我在场(F=7.79,P<0.001)与他人在场(F=7.18,P<0.001)相对于基线均表现统计显著。事后多重比较发现,B组与C组在自我在场指标上均显著低于A组;但在他人在场上,A组与B组未发现差异,C组与A组差异明显。图6为3个实验条件下社交在场各维度平均值及置信区间。
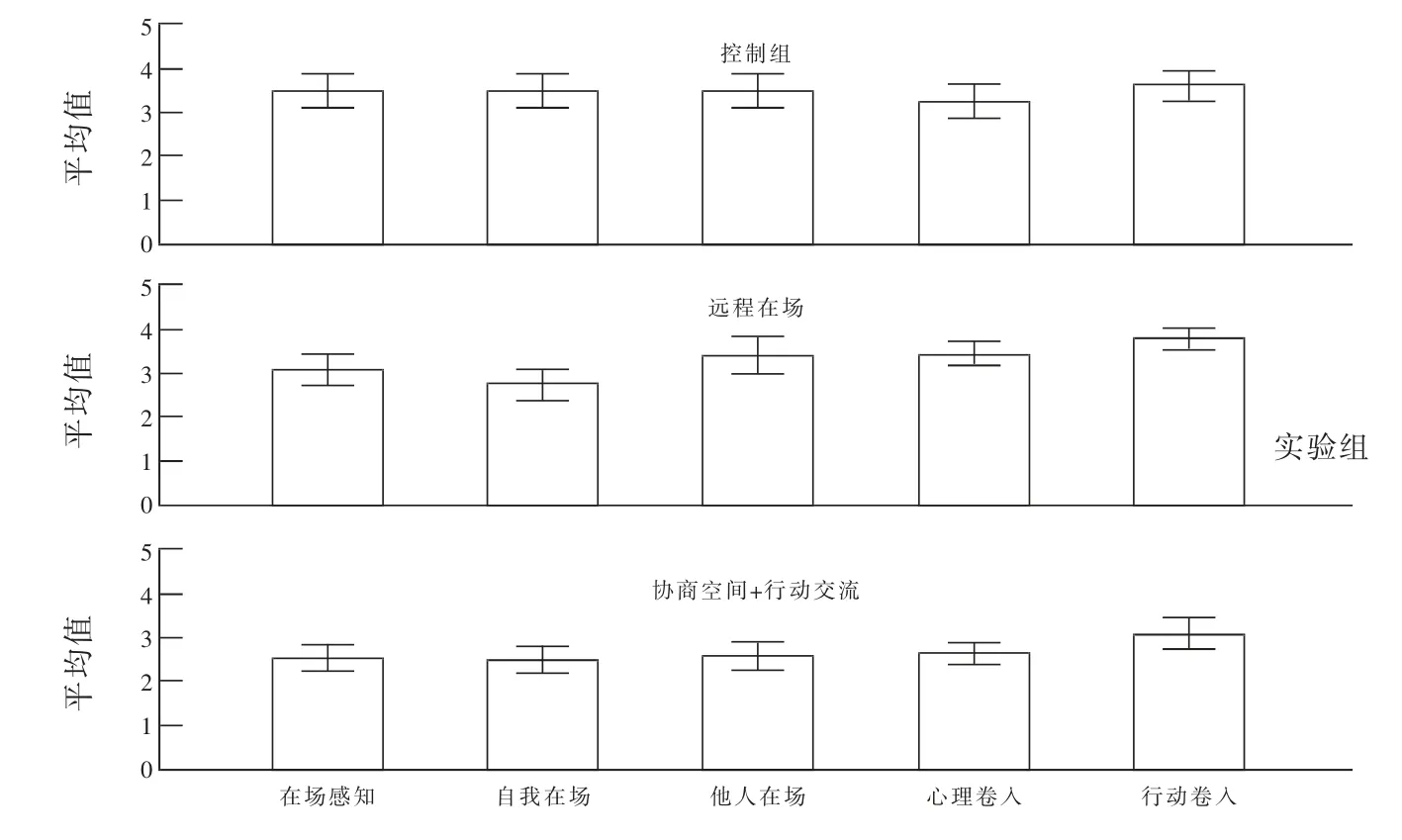
图6 社交在场3个实验条件下各维度平均值及置信区间
4.2.2 产品采用意愿与环境行为意愿 为了了解社会在场在产品采用意愿上的差异,使用单因素多元方差与多重比较。测试结果表明在场感知在采用意愿上未发现差异。但在心理卷入(F=6.198,P=0.014)、行动卷入(F=5.96,P=0.016)上存在一定程度上的差异。在环境行为意愿方面,结合方差分析与事后比较发现环境行为意愿在3个实验条件上存在显著差异(F=5.568,P=0.05),统计显著性来自A组与C组之间的差异,A组与B组差异不显著。
4.3 结果分析
测试结果显示,远程在场(B组)相对于控制组(A组)在自我在场上有更高的主体感知,并且当将行动交流与协商空间2个设计元素与远程在场一起加入设计中(C组),社会在场在各个指标上均获得统计意义上的显著提升。这一结果与上述设计思维模型的分析一致。自我在场感不一定引起他人的行动回应,因此仅提供远程在场难以提升社交强度。但该社交过程必不可少,它为后续社交行为开展提供基础。数据表明,当3个设计元素同时发挥作用,社交参与者在对他人的在场感知(他人在场)、与他人互动(心理卷入、行动卷入)等方面获得更强烈的社交体验。此外,该测试比较了传统社交干预方法与新模型方法之间的效果,结果也证实基于IoT在场化社交相比传统社交媒体在调动用户的社交互动上更为有效。最后,测试也在一定程度上表明6个设计任务不仅方便设计进程的推进,也有助于设计获得预期效果。
这一社交模式对产品采用意愿与环境行为意愿也体现出相应的设计价值。一方面,对产品有兴趣的被试表现出更强烈的心理卷入与行动卷入等在场体验;另一方面,包含全部3个设计元素的C组也比使用常规社交排名方法的A组在环境行为意愿上更高。
五、结 语
本文提出一个DfSB社交设计模式,核心目标是利用IoT技术建立社会在场化的社交关系,模糊“线上社交”和“线下行动”的界限,让社交干预能直接地作用于环境行为。在智能垃圾箱“箱伴”的设计实践中,这一设计模式得到应用。实验结果表明,结合远程在场、行动交流与协商空间3个设计元素,该智能垃圾箱能让用户产生更强烈的社会联系与社会在场感,有助于促使用户打破“扔垃圾”个人化、私域化的行动性质,在促进环境行为意识上显示出相应的效果。本研究对于如何利用IoT拓展DfSB社交设计展开一个新的视角,显示了异于主流社交网络的社交干预形式对环境行为改变的作用。
猜你喜欢
英语世界(2023年6期)2023-06-30 06:28:28
军事文摘(2022年20期)2023-01-10 07:18:38
意林彩版(2022年2期)2022-05-03 10:25:08
英语文摘(2021年11期)2021-12-31 03:25:18
第一财经(2020年4期)2020-04-14 04:38:56
作文大王·低年级(2019年6期)2019-08-01 01:44:02
文苑(2018年17期)2018-11-09 01:29:28
学生天地(2018年19期)2018-09-07 07:06:30
电子制作(2017年9期)2017-04-17 03:00:52
环球时报(2009-11-25)2009-11-25 11:38:41