PHEV行进间启动发动机的转矩协调控制策略
2021-09-08 01:06张欣崔宇轩薛奇成
华南理工大学学报(自然科学版) 2021年8期
张欣 崔宇轩 薛奇成
(北京交通大学 新能源汽车动力总成技术北京市重点实验室,北京 100044)
混合动力汽车因其具有节约能源、污染排放低等显著优点,已经成为当今汽车研究与发展的热门领域[1]。但是,混合动力汽车具有发动机、电动机等多个动力源,由于各动力源的动态响应时间相差较大,在模式切换过程中常常伴随离合器同步器的分离与接合,所以在模式切换过程中可能造成整车动力输出不足或总输出转矩波动较大的问题。由此产生的整车冲击度会直接导致乘坐的舒适性下降,因此需要制定合适的转矩协调控制策略[2]。
目前,针对混合动力汽车由纯电动驱动模式切换至混合驱动模式的过程中,涉及发动机、电机与离合器之间的转矩协调控制问题已经成为混合动力汽车的重要研究内容。童毅[3]针对一种单电机并联式混合动力汽车提出了“发动机转矩开环+发动机动态转矩估计+电机转矩补偿”的模式切换控制策略。秦大同等[4]以单电机插电式混合动力系统为研究对象,提出了基于离合器压力模糊控制的模式切换动态协调控制策略,有效降低了纯电动模式切换混合驱动模式过程中动力传动系统的转矩波动。杜波等[5]将一种基于行星排机构的混合动力汽车的模式切换分为3类,针对每种模式切换提出了相应的转矩协调控制策略,仿真结果表明该控制策略可以有效地提高模式切换过程的平顺性。Smith等[6]基于一种并联式混合动力系统,采用了一种鲁棒性好的控制算法,可以减小模式切换过程中离合器需求转矩与预估转矩的差值,更好地得到电机的补偿转矩。Kim等[7]针对一种单电机并联式混合动力系统建立了转矩干扰观测器,通过干扰观测器对干扰量进行估计,然后通过电机补偿干扰量来消除传动系统输出转矩的突变。Song等[8]以并联式混合动力汽车为研究对象,通过建立模式切换测试平台确定了模式切换过程中离合器的接合点,并以此提出了发动机与离合器相协调的控制策略,该控制策略可以有效地减小动力传动系统的转矩波动。目前针对单电机并联式混合动力汽车的模式切换控制策略研究得较多,对于双电机混联式混合动力汽车的模式切换控制策略研究得较少。
本研究以插电式混合动力系统为对象,针对由双电机纯电动驱动模式切换至混合驱动模式的模式切换过程,提出基于发动机怠速转速点火的“离合器油压模糊控制+电机转矩补偿+发动机主动调速+发动机转矩变化率限制”的模式切换控制策略。基于在AMESim平台中建立的整车动力传动系统模型和在Matlab/Simulink中搭建的模式切换控制策略模型进行了联合仿真分析,并与采用发动机目标转速点火的模式切换控制策略进行了对比分析。通过分析仿真结果可知,该控制策略有效降低了离合器滑摩功,延长了离合器的使用寿命。同时,可以有效地减小模式切换过程中动力系统的总输出转矩波动,降低了整车冲击度,提高了模式切换过程的平顺性。
1 研究对象
1.1 混合动力系统结构
本研究的被控对象构型如图1所示。此混合动力系统是国内某企业自主研发的,其整车主要参数见表1。该混合动力汽车由发动机、电机EM1和电机EM2构成动力输出系统,由G1、G2和G3共3个挡位构成动力传递系统,由C1、C2、C3离合器和1个同步器,以及换挡机构组成动力模式切换和速比转换的执行系统。
1.2 系统工作模式
由于本研究的混合动力系统具有1个发动机、2个电机和3个离合器,所以根据不同的整车需求功率,可以在多种工作模式之间进行切换,实现全工况覆盖,并且能够提供更灵活的动力性和经济性调试方案。主要的工作模式如表2所示。
表中,Treq为整车需求驱动转矩,TEM2为电机2的峰值转矩,TEM1为电机1的峰值转矩,TEngine为发动机的最大转矩,SOChigh、SOClow分别为动力电池电量的上限和下限,Tbrake为整车需求制动转矩,Tbr_EM2为电机2的最大制动力。
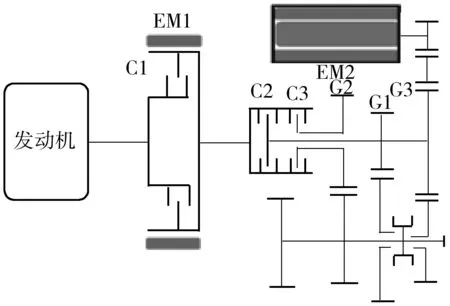
图1 混合动力汽车系统构型图Fig.1 Structure diagram of hybrid electric vehicle
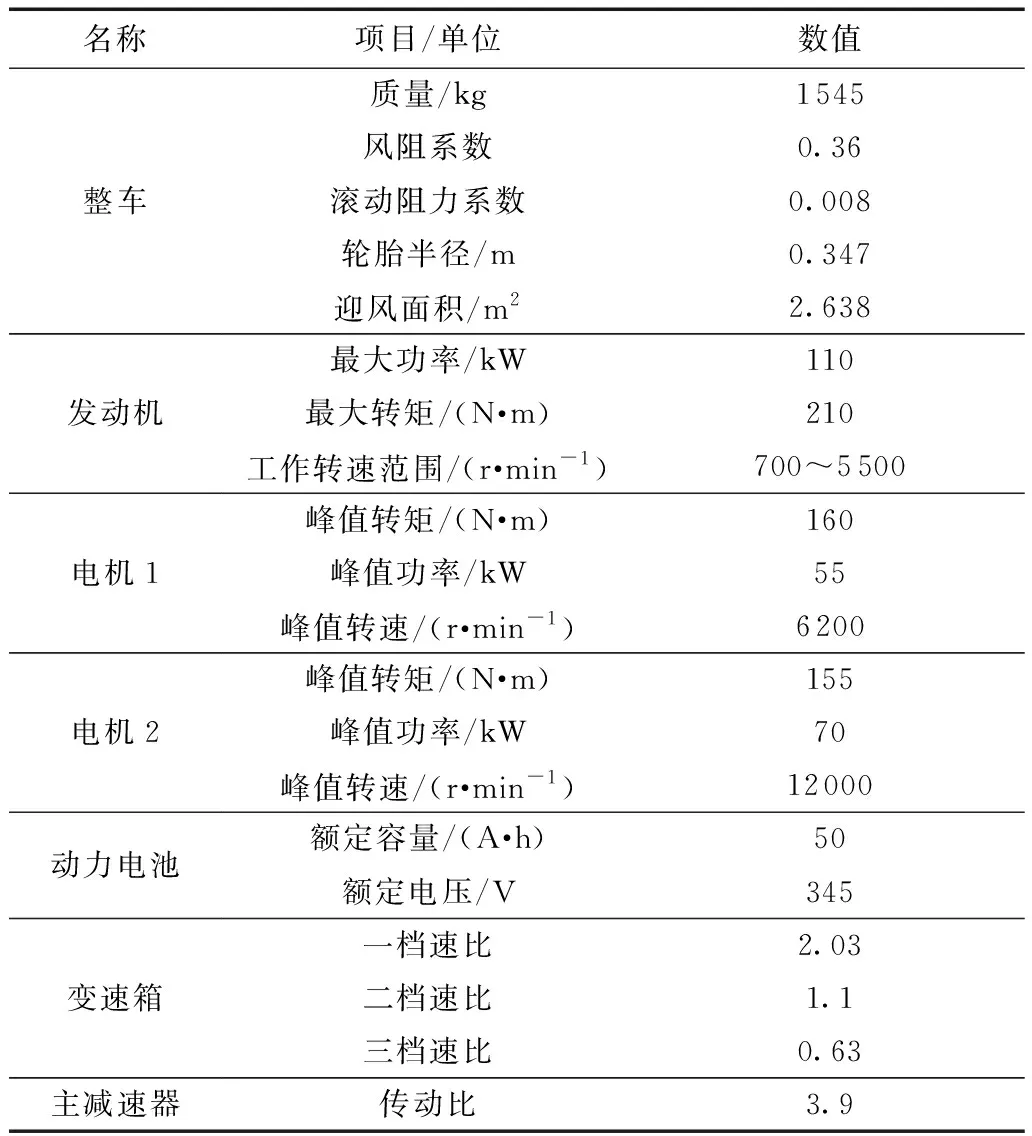
表1 整车主要参数Table 1 Main parameters of the whole vehicle
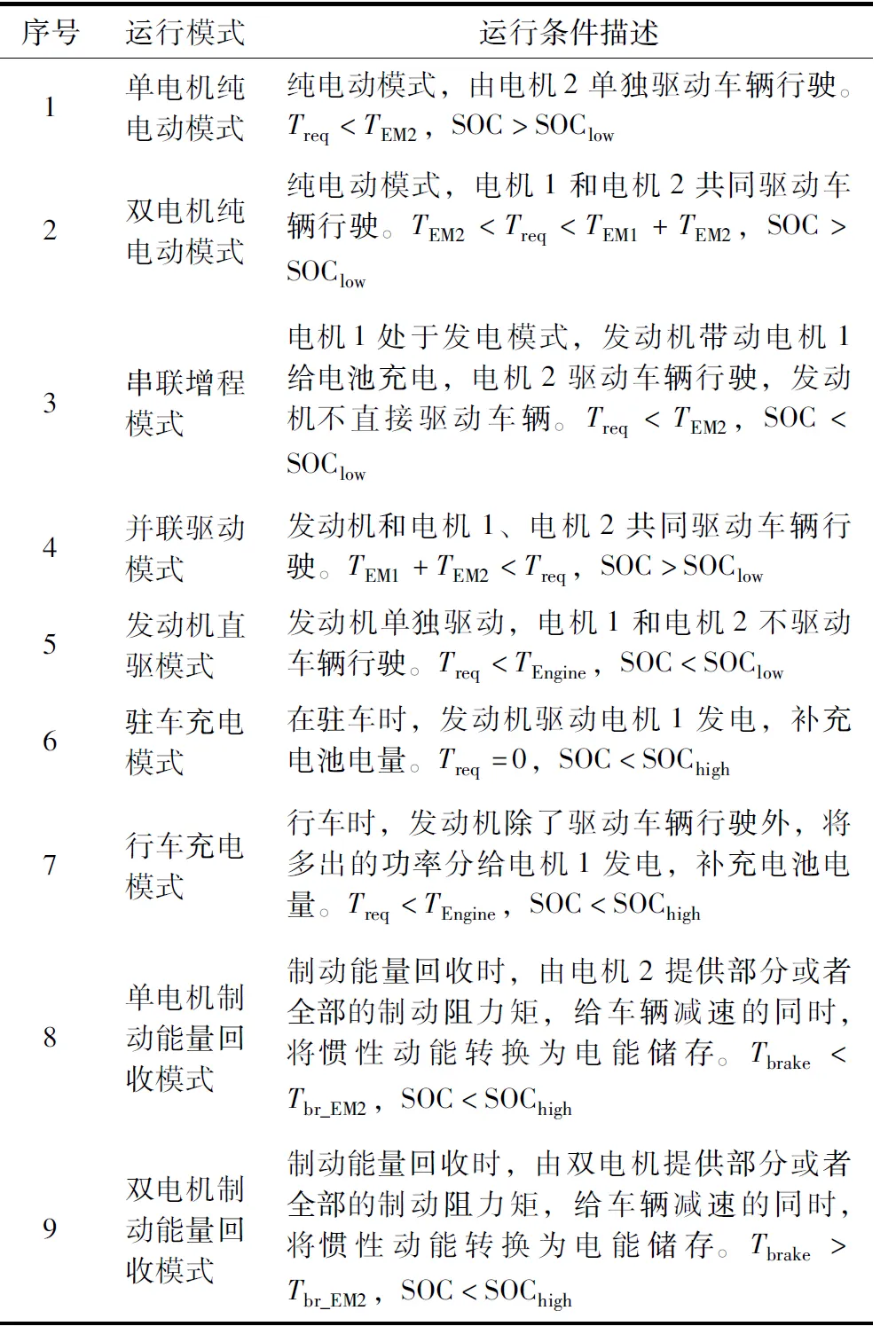
表2 工作模式Table 2 Working mode
2 转矩协调控制策略
该混合动力系统具有9种工作模式,可将各个模式切换进行如下分类:①涉及离合器动作的模式切换;②涉及启停发动机的模式切换。本研究将选取较为典型的由双电机纯电动模式切换为并联驱动模式进行重点研究。该模式切换涉及行进间启动发动机过程中的离合器C1、发动机和电机的转矩协调控制问题,具有重要的研究意义。本研究将整个模式切换过程划分为4个阶段,包括双电机纯电动驱动阶段、启动发动机阶段、发动机调速阶段以及混合驱动阶段。
2.1 离合器油压模糊控制策略
在启动发动机阶段,需要依靠离合器C1滑摩产生的摩擦转矩将发动机曲轴从静止拖动到发动机怠速转速(700 r/min)。将发动机转速从静止拖动至怠速转速并启动发动机应在0.4 s内完成[5]。在此过程中,电机1需要动态补偿离合器C1的摩擦转矩,以保证发动机启动时,不会对混合动力系统的总输出转矩产生较大波动,影响模式切换的平顺性。由式(1)可知,离合器摩擦转矩的大小主要由离合器活塞缸的缸内油压决定,所以对离合器的控制主要是对离合器油压进行控制。离合器的油压变化过程由初始结合油压和油压变化率决定,离合器初始结合油压和油压变化率对离合器的摩擦转矩和离合器滑摩时间的影响最大,是离合器控制的重点[9- 10]。由于离合器接合过程具有很强的非线性,难以用准确的数学模型表达,所以采用模糊控制策略来控制离合器初始油压和变化速率。模糊控制系统结构如图2所示。
离合器的摩擦转矩为[4]:
我父亲1918年初生人,属马。要是活着今年整一百岁了。我奶奶家当年是做生意的,经济上挺富裕。1916年她16岁那年,在读私塾的时候认识了我爷爷。当时我爷爷家境并不好,只因为他叔叔是教书先生,他才能跟着读私塾。那个年代婚姻都是家长做主,可我奶奶有大小姐脾气,再加上民国了读书了,思想相对开放了,非要嫁我爷爷不可。一来二去,家里看实在拦不住了,只能勉强同意。转年,我爷爷家下了聘礼,我奶奶下嫁了我爷爷。
Tcl=sgn(ωm-ωe)μzAp(pin-pbase)Rm
(1)
(2)
式中,μ为摩擦片的摩擦因数,z为离合器的摩擦
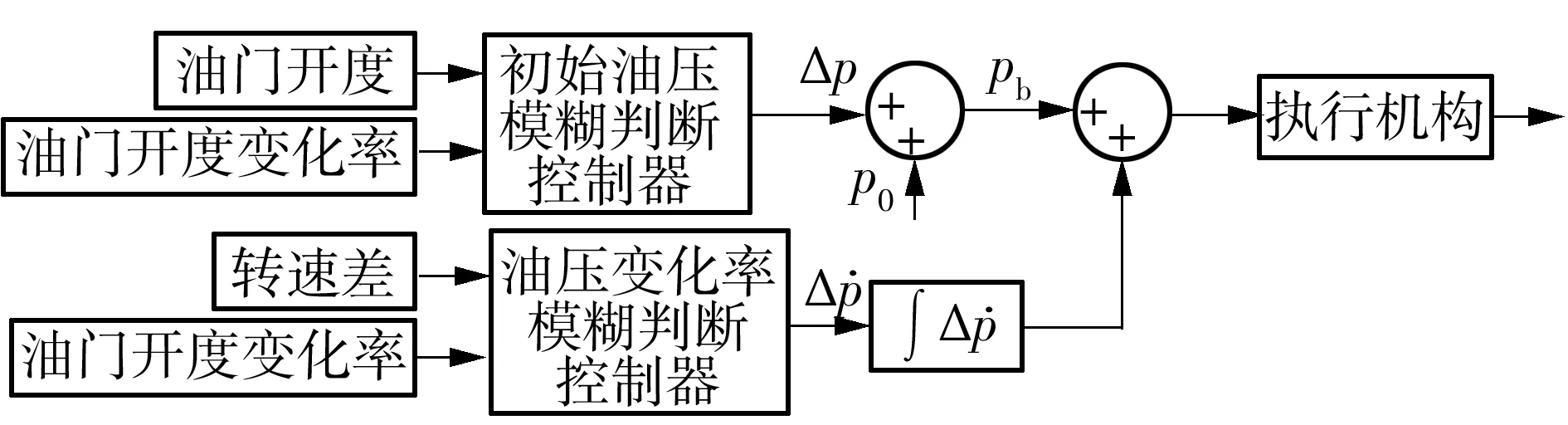
图2 离合器油压模糊控制系统Fig.2 Fuzzy control system of clutch oil pressure
片数,Ap为活塞作用面积,pin为活塞缸的控制压力,pbase为回位弹簧压力,Rm为摩擦片的等效摩擦半径,Ro、Ri分别为离合器片的内外半径,ωm、ωe分别为电机和发动机的角速度。


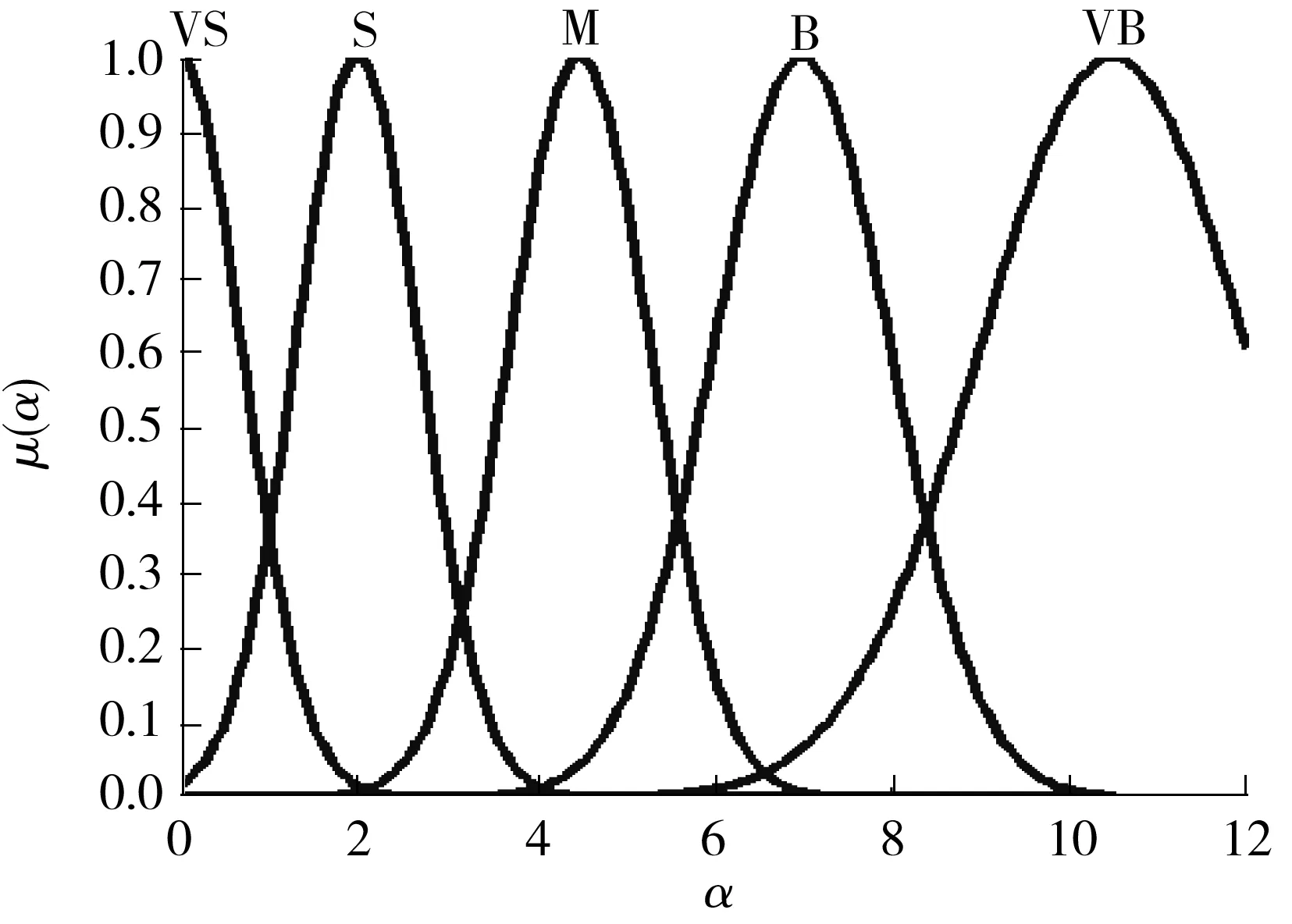
图3 油门踏板开度α模糊子集与隶属度
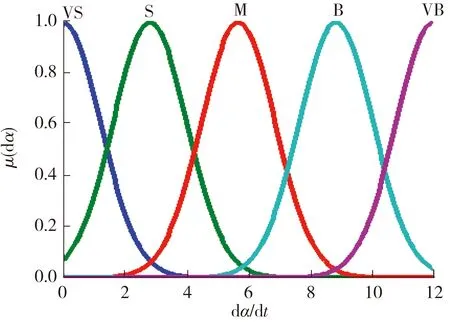
图4 油门踏板开度变化率模糊子集与隶属度
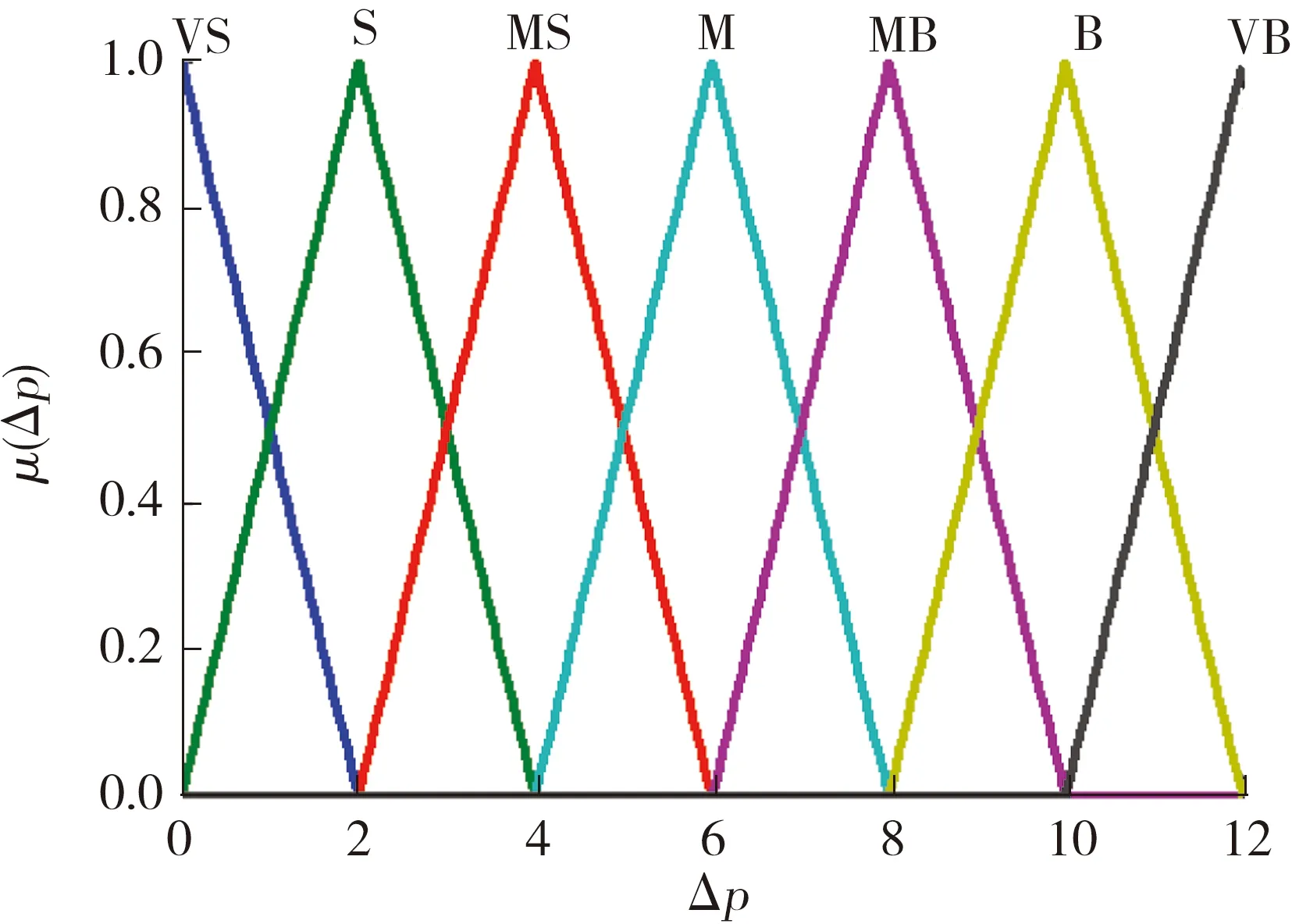
图5 离合器初始油压增量Δp模糊子集与隶属度
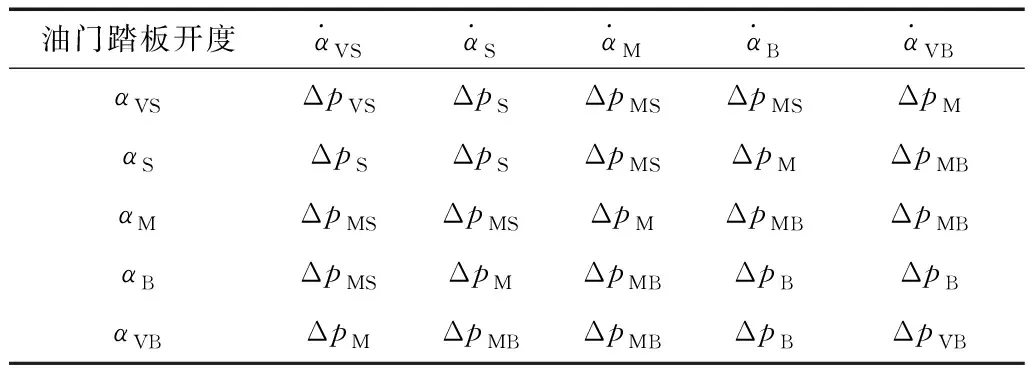
表3 离合器初始结合油压模糊控制规则表Table 3 Fuzzy control rule of initial clutch oil pressure
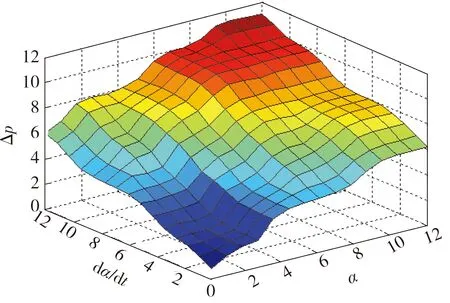
图6 离合器初始油压增量Δp的模糊控制规则曲面
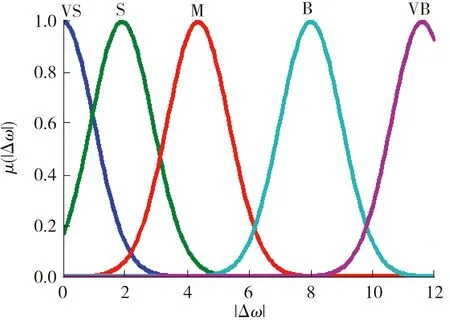
图7 转速差|Δω|模糊子集与隶属度

图8 离合器结合油压变化率模糊子集与隶属度
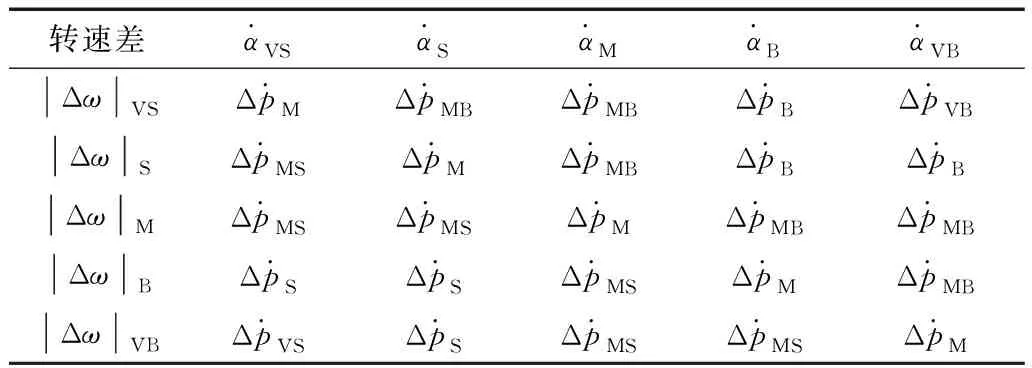
表4 离合器油压变化率模糊控制规则表Table 4 Fuzzy control rule of clutch oil pressure change rate
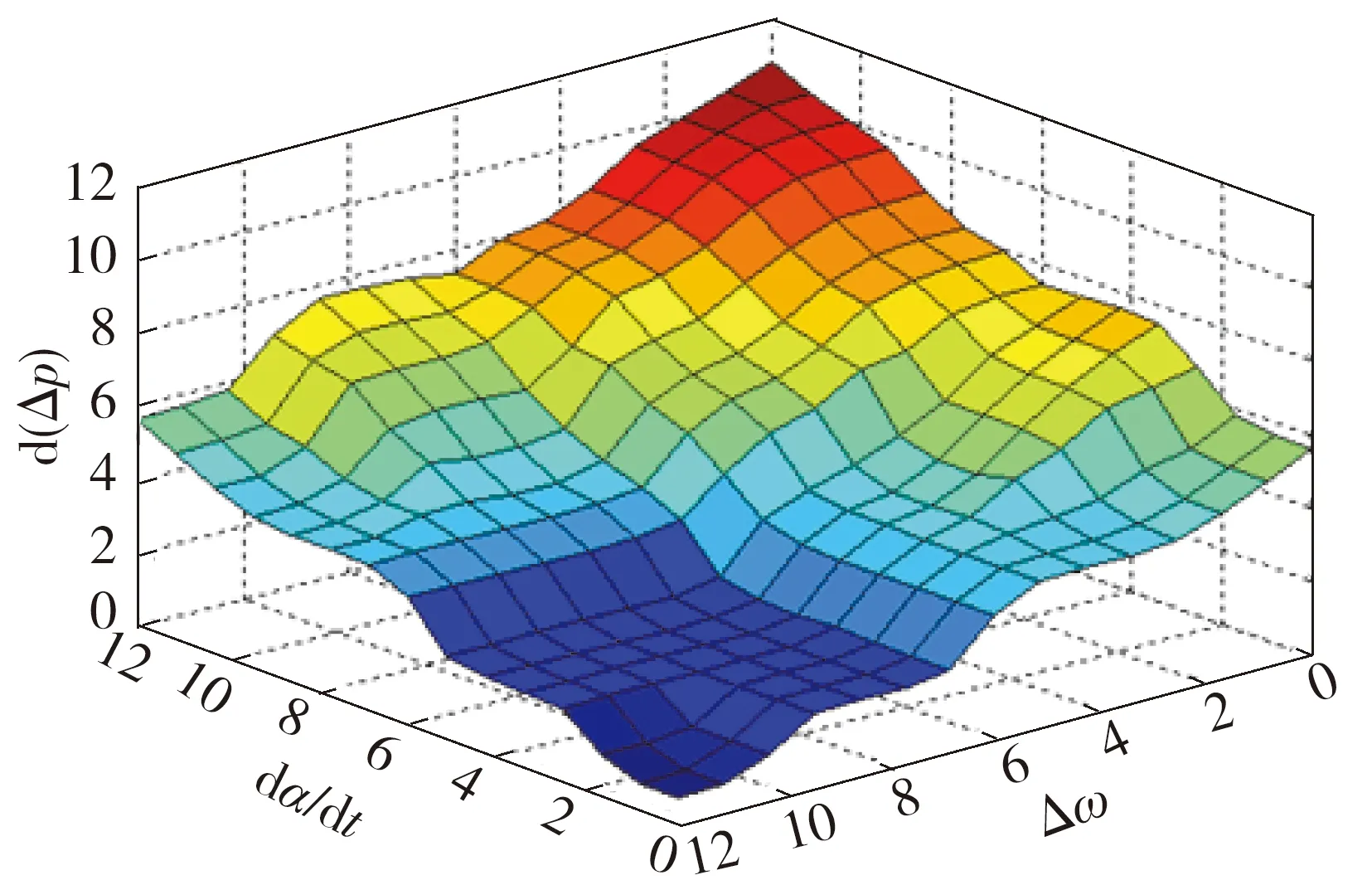
图9 离合器结合油压变化率的模糊控制规则曲面
(3)
(4)

为验证离合器油压模糊控制策略的控制效果,分别对离合器初始结合油压控制器和油压变化率控制器进行仿真验证。在油门踏板开度变化率一定时,分别在油门踏板开度为20°、40°、60°、80°、90°时进行仿真。由图10可知,离合器的初始结合油压随着油门踏板开度的增大而增大。在油门踏板开度一定和转速差一致时,验证不同油门踏板开度变化率对离合器初始结合油压和油压变化率的影响。由图11可知,油门踏板开度变化率越大时,离合器的初始结合油压越大,油压变化率也越大,离合器完成接合的时间也越短。
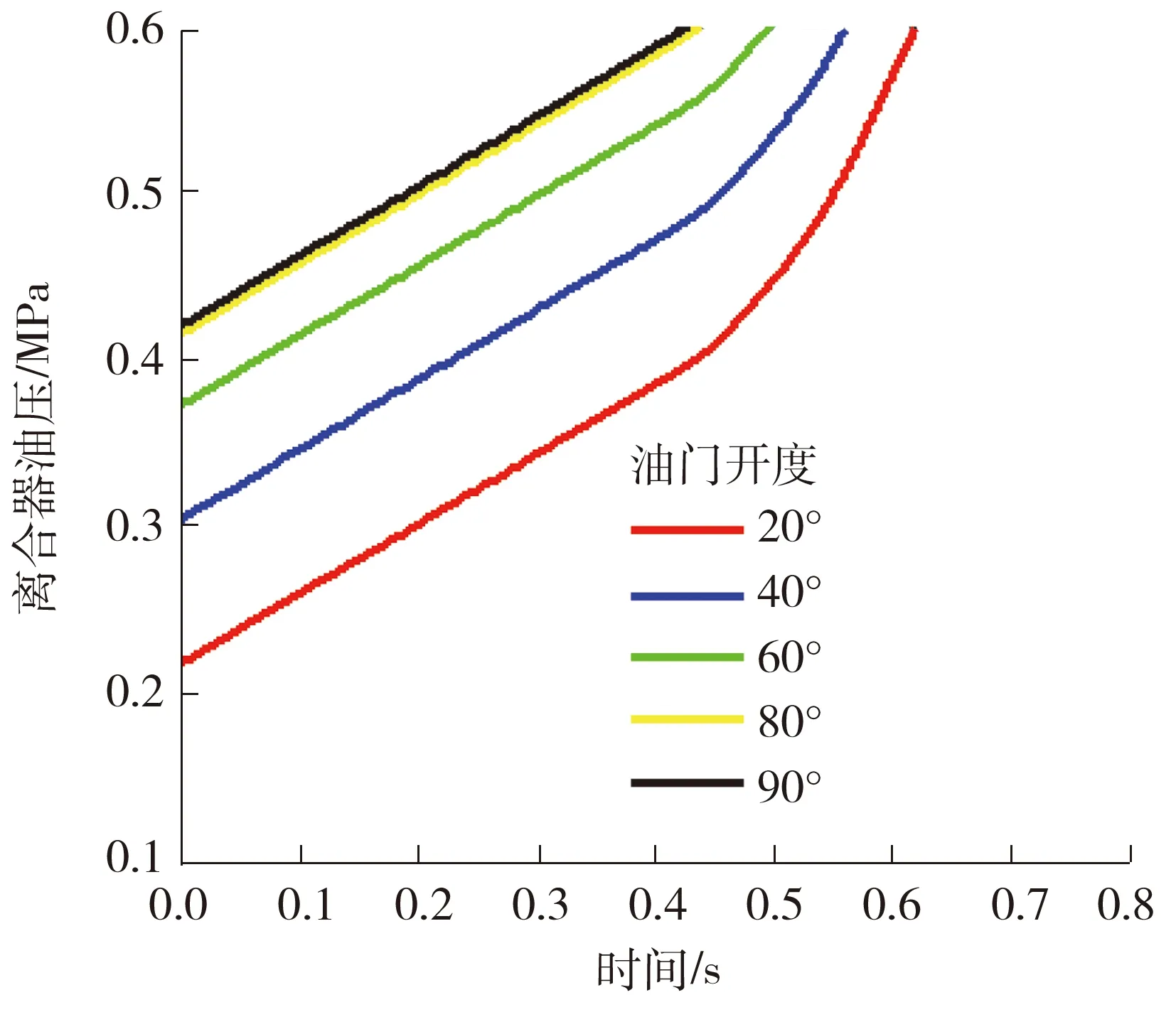
图10 不同油门踏板开度下的离合器初始结合油压

图11 不同油门踏板开度变化率下的离合器油压
2.2 动力源转矩协调控制策略
2.2.1 发动机调速控制
在进入发动机调速阶段时,发动机转速并未达到电机1转速,所以离合器两端仍有转速差。为避免离合器过度滑摩产生的大量滑摩功,降低离合器的使用寿命,在发动机启动后,离合器油压应立即退回至待接合点油压,离合器分离,发动机进行调速控制。调速过程应尽快完成,否则会影响模式切换的时间和平顺性。
发动机的转速控制是通过调节节气门开度实现的。由于发动机是高度复杂的非线性系统,节气门开度响应的时变特性和积分环节带来的滞后影响以及微分环节导致的震荡加剧都难以控制,而且发动机调速过程只需要将发动机转速迅速升高,当发动机转速与电机1转速差缩小至50 r/min时,离合器就可以迅速接合[13]。采用比例(P)控制就可以实现从怠速转速迅速响应至目标转速,不需要通过积分调节(I)和微分调节(D)来消除稳态误差和偏差去保持两者转速同步,所以发动机调速控制系统采用比例(P)控制。
发动机的目标转速为电机1的转速,该转速可通过电机1的转速传感器由电机控制器获得。发动机的实际转速由曲轴转速传感器获得。比例(P)控制器的输入为发动机的目标转速与实际转速的转速差,输出为油门踏板开度。发动机调速控制系统如图12所示。

图12 发动机调速控制系统Fig.12 Engine speed control system
2.2.2 电机转矩补偿
在启动发动机阶段,离合器C1产生的摩擦转矩会影响混合动力系统的总输出转矩,导致模式切换过程中总输出转矩波动,因此需要利用电机动态响应快、易于控制的优点,对离合器的摩擦转矩进行实时补偿。离合器的摩擦转矩Tcl由式(1)可知,通过离合器活塞缸内的压力可以估计出摩擦转矩的大小,活塞缸内的压力又可以从离合器模糊控制器输出的离合器结合油压得到,从而实现电机1对离合器C1摩擦转矩的补偿[14],电机1的目标转矩如式(5)所示。电机补偿离合器摩擦转矩控制策略如图13所示。
Tmtar=Treq+Tcl
(5)
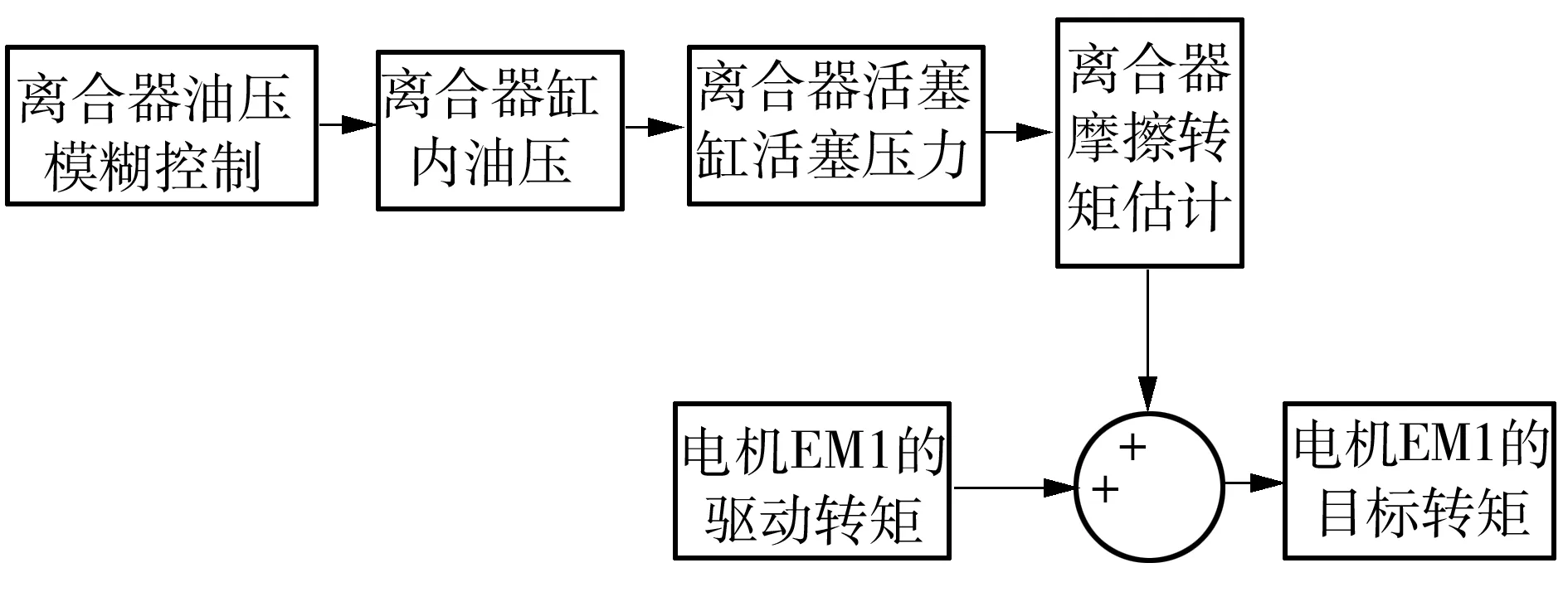
图13 电机补偿离合器摩擦转矩的控制策略
在发动机调速完成后,离合器C1迅速接合,进入混合驱动阶段。此时发动机转速和电机1转速一致,但是发动机并未达到目标转矩,需要从当前节气门开度变化到目标节气门开度。然而,发动机是高度非线性的复杂系统,动态响应较慢,不易控制,而电机可以快速响应目标转矩[15]。因此,可以通过限制节气门的开度变化率,由当前发动机的转速和节气门开度,通过发动机map图,估计出发动机转矩,并将驾驶员总需要转矩与发动机转矩进行比较,得到的差值由两个电机进行补偿。电机补偿发动机转矩控制策略如图14所示。

图14 电机补偿发动机转矩的控制策略Fig.14 Control strategy of motor compensating engine torque
3 仿真验证与分析
3.1 基于AMESim和Simulink的联合仿真平台
针对本研究提出的采用发动机怠速转速点火的“离合器油压模糊控制+电机转矩补偿+发动机主动调速+发动机转矩变化率限制”的转矩协调控制策略,基于在LMS.AMESim搭建的混合动力系统传动模型和在Matlab/Simulink建立的控制策略模型构成的联合仿真平台,对由双电机纯电动驱动行进间启动发动机的模式切换过程进行仿真分析。联合仿真平台如图15所示。
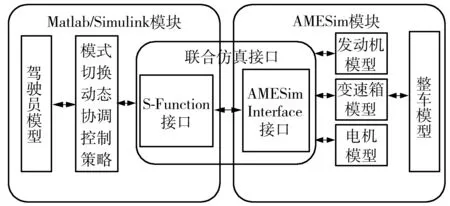
图15 联合仿真平台示意图Fig.15 Schematic diagram of joint simulation platform
为验证联合仿真平台的效果和整车动力传动模型的动力性,采用欧洲循环驾驶工况(NEDC)进行仿真验证[16],仿真结果如图16所示。由图可知,仿真车速可以较好地跟随NEDC工况目标车速,证明其动力性能完全满足需求,该联合仿真实验平台可用于混合动力汽车模式切换控制策略的验证。
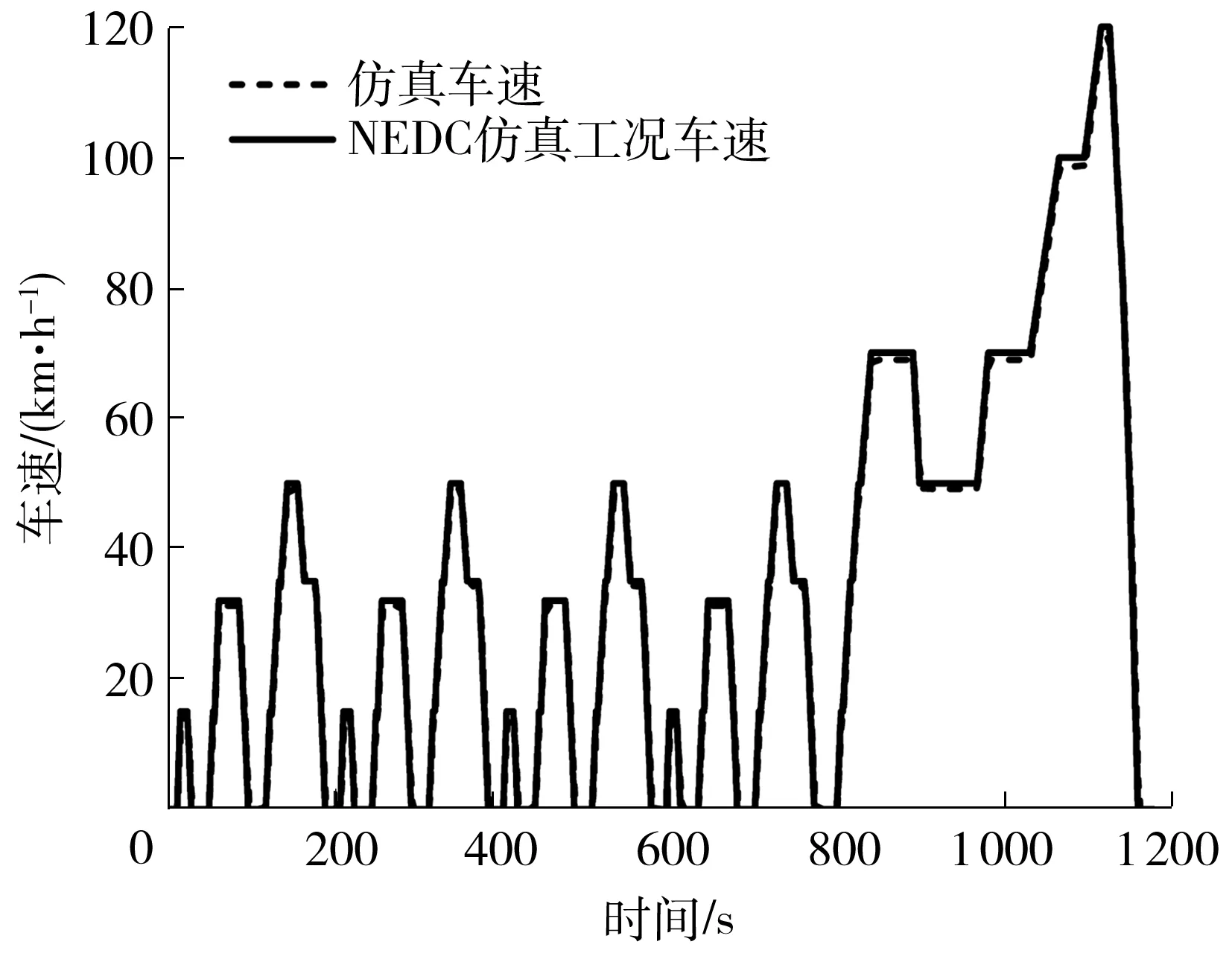
图16 NEDC工况仿真结果Fig.16 Simulation results of NEDC operating condition
3.2 模式切换控制策略的仿真分析
整车以双电机纯电动驱动模式起步,以较小的加速度匀加速行驶,当行驶至9 s左右时,整车以较大的加速度加速行驶,双电机纯电动模式下不能满足整车的需求驱动转矩,控制器发出模式切换控制指令,开始切换至混合驱动模式。仿真工况如图17所示。模式切换控制策略的仿真结果如图18所示。
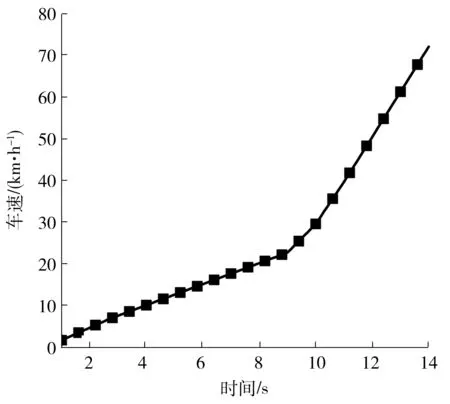
图17 模式切换仿真工况Fig.17 Simulation conditions of mode transition
从图18(b)可以看出,9.7 s时,控制器发出模式切换指令,离合器开始充油,通过滑摩产生摩擦转矩克服发动机阻力矩拖动发动机转动。此时,电机1提供驱动转矩的同时,补偿离合器的摩擦转矩。由图18(c)可知,10.1 s时,发动机转速达到怠速转速,离合器迅速分离,发动机启动。发动机在0.4 s内完成启动,符合发动机启动要求。发动机启动后,进行调速控制,发动机转速迅速上升。由图18(a)可知,发动机刚开始调速时,发动机转矩较低,所以转速上升较慢,随后逐渐加快。10.5 s时,发动机转速与电机1转速基本同步,离合器油压开始迅速上升,10.6 s时,油压达到离合器缸内最大油压,发动机转速与电机1转速一致,离合器立即锁死,完成接合。模式切换完成后,由于限制了节气门开度变化率,发动机逐渐向目标转矩响应,此过程中双电机补偿发动机转矩,提供剩下的需求驱动转矩。
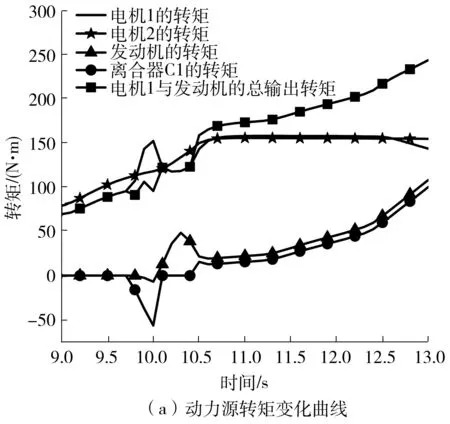
图18 本研究的模式切换控制策略的仿真结果
3.3 不同模式切换控制策略的对比仿真分析
将本研究提出的由双电机纯电动模式切换为混动模式的模式切换控制策略与其他模式切换控制策略进行对比分析。控制策略A为发动机采用目标转速点火[4],离合器油压控制采用常用的PI控制。其余控制策略与本研究的控制策略一致。即开始进行模式后,离合器一直处于滑摩状态,直到发动机转速与电机1转速同步,离合器立即接合,发动机点火工作,共同提供驱动转矩。控制策略A的仿真结果如图19所示。将控制策略A与本研究提出的控制策略进行对比分析,如图20所示。选取离合器滑摩功和冲击度作为评价模式切换控制效果的指标[17]。
(6)
式中,Wcl为离合器滑摩功,tcl为离合器滑摩时间,Tcl为离合器摩擦转矩。
(7)
式中,j为整车冲击度,a为车辆加速度,v为车速。
如图19和图20(a)所示,控制策略A下的发动机转速在离合器的摩擦转矩作用下,从9.7 s开始上升,直至10.5 s时与电机1转速基本一致,离合器接合,完成模式切换。由于控制策略A没有发动机调速过程,离合器所产生的滑摩功远远大于本研究提出的控制策略,滑摩功曲线如图20(b)所示。此外,由图20(b)可知,控制策略A采用的离合器油压PI控制所产生的离合器初始结合油压为6.3×105Pa,远大于本研究提出的控制策略采用的离合器油压模糊控制所产生的离合器初始结合油压。由离合器摩擦转矩公式(2)可知,离合器摩擦转矩受离合器结合油压的影响,由于控制策略A的初始油压远大于本研究提出的控制策略,所以离合器摩擦转矩在9.8 s开始滑摩时产生了-55 N·m的转矩突变,如图20(c)所示。由图19可知,由于电机1转矩响应存在一定的滞后,在开始滑摩瞬间,电机1不能完全补偿离合器摩擦转矩的突变,导致电机1与发动机的总输出端在9.8 s时产生-47 N·m的转矩波动,造成的整车冲击度为-8.1 m/s3。而本研究提出的控制策略所采用的离合器模糊控制策略在离合器开始滑摩阶段由于初始结合油压较低且油压变化率较小,所以离合器摩擦转矩突变较小,电机1可以良好地补偿离合器摩擦转矩,产生的冲击度较小,保证启动发动机过程较为平稳。
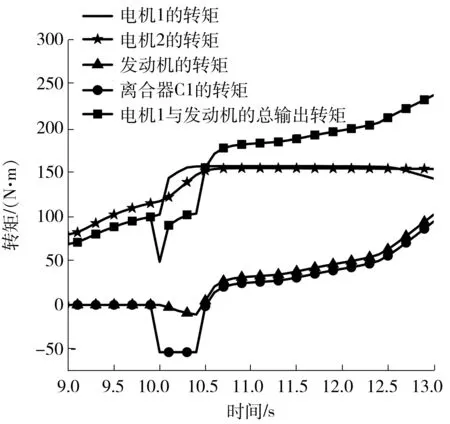
图19 模式切换控制策略A的仿真结果
对本研究提出的控制策略采用发动机怠速转速点火的控制方法与控制策略A采用的发动机目标点火的控制方法进行对比分析。采用发动机怠速转速点火时,由于在发动机怠速启动后,离合器迅速分离,发动机主动调速,不需要通过离合器滑摩将发动机转速拖动至目标转速,从而可以明显降低离合器的滑摩功,延长离合器的使用寿命。但是采用发动机怠速转速点火控制方法在发动机转速达到怠速时,由于离合器迅速分离,导致离合器摩擦转矩会阶跃至0,造成4.8 m/s3的整车冲击度。而采用发动机目标转速点火控制方法,通过离合器摩擦转矩将发动机转速从静止直接拖动至目标转速,离合器迅速接合,发动机启动,从而避免在启动发动机阶段由于离合器分离带来的整车冲击。
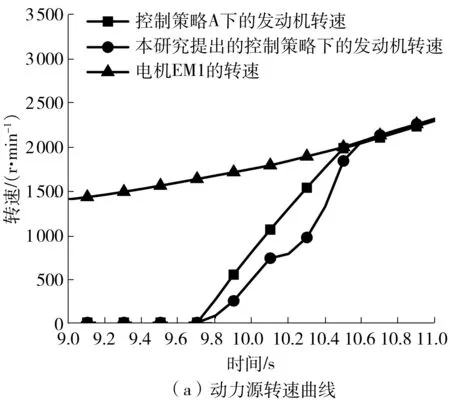
图20 不同模式切换控制策略的仿真结果
通过对仿真结果进行分析可知,本研究提出的控制策略在离合器滑摩功和整车冲击度两项评价模式切换品质指标上较控制策略A均有较大改善。本研究提出的控制策略的冲击度最大为4.8 m/s3,相较控制策略A的最大冲击度8.1 m/s3降低了40.7%,并且远小于德国标准9.8 m/s3[18]。本研究提出的控制策略所产生的离合器滑摩功为1 969.9 J,相较控制策略A所产生的3 251.7 J滑摩功减小了39.4%。对比仿真结果可知,本研究提出的模式切换控制策略既能很好地控制离合器的滑摩功以延长离合器的使用寿命,又可以降低模式切换过程中的整车冲击度以提高平顺性。
4 结语
本研究针对插电式混合动力系统,进行了工作模式梳理,重点分析了由双电机纯电动驱动模式切换为并联式混合驱动模式的模式切换过程。在AMESim中建立了整车动力传动系统模型,在Simu-link中建立了转矩协调控制策略模型,并进行了联合仿真分析。将整个模式切换过程划分为纯电动驱动阶段、启动发动机阶段、发动机调速阶段以及混合驱动4个阶段,提出了基于发动机怠速转速点火的“离合器油压模糊控制+电机转矩补偿+发动机主动调速+发动机转矩变化率限制”的转矩协调控制策略。将本研究提出的基于发动机怠速转速点火控制策略与发动机目标转速点火控制策略进行了对比分析。结果表明,本研究采用的发动机怠速转速点火控制策略相较发动机目标转速点火控制策略在离合器滑摩功评价指标方面优化了39.4%,提高了离合器使用寿命,但是由于发动机怠速转速点火控制策略在发动机达到怠速转速启动后,离合器要迅速分离,相比发动机目标转速点火控制策略会多产生一次整车冲击。在模式切换过程中的启动发动机阶段,将本研究采用的离合器油压模糊控制与离合器油压采用PI控制进行了对比分析。通过仿真分析可知,离合器油压采用模糊控制可以较好地控制离合器初始结合油压和油压变化率,相比离合器油压采用PI控制可以明显降低在离合器滑摩阶段的整车冲击度,提高了模式切换过程中的平顺性。
猜你喜欢
汽车实用技术(2022年16期)2022-08-31
汽车实用技术(2022年4期)2022-03-07
汽车维护与修理(2021年3期)2021-08-12
科学与财富(2021年33期)2021-05-10
北京汽车(2021年2期)2021-05-07
发电技术(2020年3期)2020-06-29
汽车与驾驶维修(维修版)(2019年4期)2019-09-10
——次级调压阀
汽车与驾驶维修(维修版)(2019年7期)2019-07-29
戏剧之家(2018年21期)2018-10-19