高速公路团雾预警系统设计
2021-09-05 11:43吴宇轩李世臻
电子设计工程 2021年17期
吴宇轩,李世臻,刘 楠
(1.长安大学信息工程学院,陕西 西安 710000;2.长安大学电子与控制工程学院,陕西 西安 710000)
高速公路车辆运行安全与高速公路天气状况有着密切的关系[1]。2016年,公安部交通管理局组织对高速公路团雾多发路段进行排查,总结出年均发生3次以上团雾高速路段1 788处,其中,年均发生10次以上高速路段912处。文献[2-4]研究了高速公路团雾对行车安全的影响,说明了对团雾天气检测的必要性、可行性。现有的高速公路天气预警仍然依赖于天气预报,其时效性、准确性和应急反应能力都无法满足需求。
近些年来,对雾的特征分析、雾的形成原理、等级评判的相关研究更加深入[5-6]。文献[7]开展了团雾主动诱导系统的监测研究[7]。文中结合先前国内研究的团雾各项特征,通过各传感器实际测量值,给出了一组团雾等级划分的参考指标,进一步扩展了团雾的等级分类。同时,结合多种传感器构成了团雾检测和数据传输一体系统,给出了相应车辆管控措施。
1 系统构成
系统使用STM32单片机作为主控,由道路控制端、团雾检测端、MCU控制端以及云端服务平台构成。其中,图雾检测端主要包括温度湿度传感器、PM值传感器、摄像头、能见度仪;道路控制端主要包括LED情报板、光电检测模块、引导灯带;MCU控制端包括无线收发模块、GPRS模块。图雾预警系统结构如图1所示。
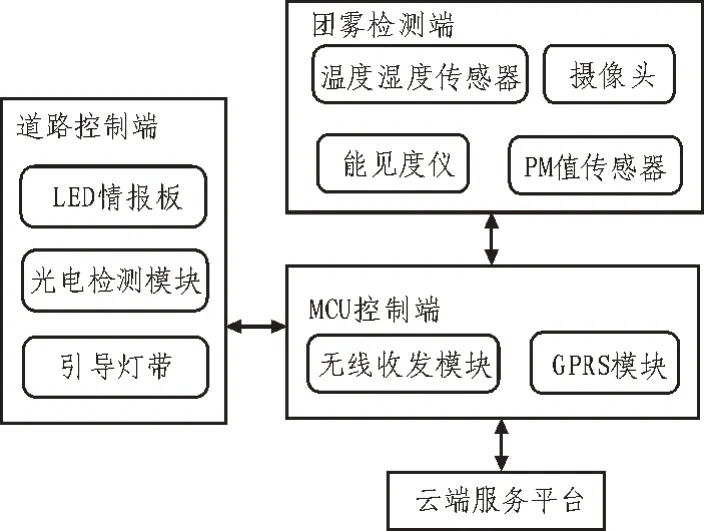
图1 团雾预警系统结构框图
1.1 团雾检测
团雾检测依照雾的能见度特性、相对湿度特性、气溶胶粒子特性[8],设置了温度湿度传感器,用于相对湿度的测量;能见度仪用于对地面能见度距离进行测量;PM值传感器用于测量气溶胶粒子和霾滴的浓度。将检测到的各项数值通过串口连接,并发送到主控端上。
1.2 团雾等级划分
根据各项传感器传输的数据,结合气象部门对相关参数的研究,给出不同条件下形成的团雾等级划分指标[9]。
1.3 数据处理与控制策略
MCU主控根据不同模块回传的数据进行分析并上报云端服务平台,确定团雾的等级后,控制引导终端对高速公路车辆进行引导,并实时反映路况。
云端数据平台对上传的数据进行存储、分析、道路监控,实现快速、准确的检测,并及时通知道路管理部门,协同控制公路引导设施,并通过基站实时发布预警信息和路况,保护行车安全。
2 团雾检测
2.1 温度湿度传感器
温度湿度传感器一般采用弹性吸湿聚合物薄膜材料作为敏感介质,湿度变化会引起负载质量、声电作用以及粘弹性发生变化[10]。其线性动态范围较大,可以测量相对湿度范围为0~100%RH,精度在±3%RH的空气湿度变化。温湿度传感器原理如图2所示。
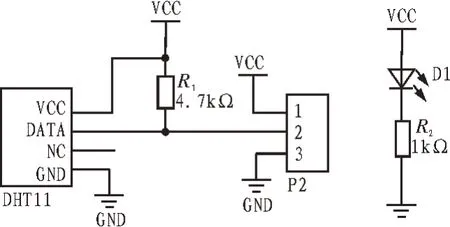
图2 温湿度传感器原理图
2.2 PM值传感器
PM值传感器利用其内部的光学灰尘传感器(GP2Y1014AU0F),将安装于对角线一端的一个红外发光二极管开启,另一端的光电晶体管用于检测接收光强,即光强正比于检测处粉尘浓度。PM值传感器原理如图3所示。
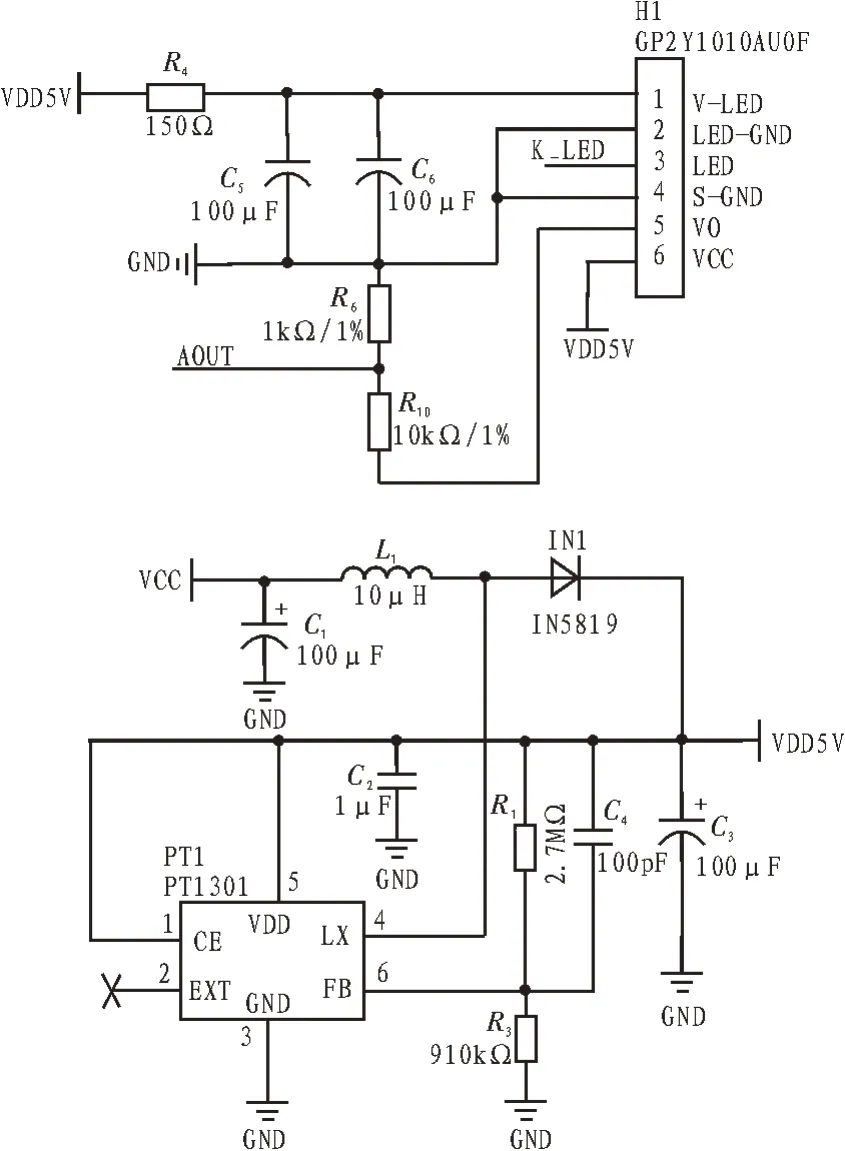
图3 PM值传感器原理图
2.3 摄像头
将光照射到感光阵列产生相应电荷,传输到相应的模拟信号处理单元,再由AD转换为数字信号。摄像头传输采用SCCB协议,其传输格式为起始位+ID地址+寄存器地址+数据+结束位。摄像头先将图像缓存到单片机上,再通过无线收发模块将图像上传至上位机摄像头,帧格式如表1所示。
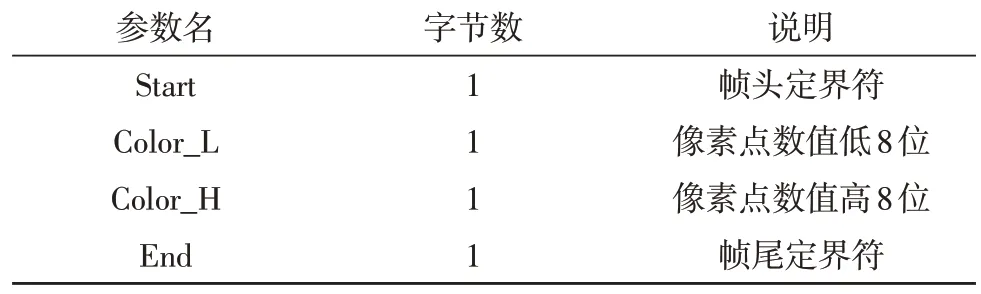
表1 摄像头传输帧格式
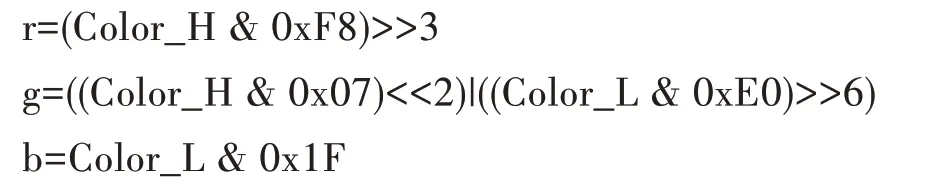
将数据帧转化为R、G、B阵代码,如下:
2.4 能见度仪
能见度仪可反映大气透明度指标。根据Mie散射理论,得到大气粒子散射角θ在20o~50o时,大气粒子散射光强度I(θ)与大气散射系数Ks和入射光强I0之间存在线性关系[11],如下:

气象光学视程V可表示为:

其中,视觉对比度为ε,前向散射能见度仪可根据式(1)测量出Ks,进一步根据式(2)测量出气象光学视程V。
2.5 无线收发模块
无线收发模块将数字电信号转化为高频电磁波发射出去,在接收端还原成电信号[12],其基本构成有振荡器、调制器、变频器、高频功率放大器、天线。文中系统采用的模块工作于441 MHz参数下,通信距离为3 000 m,可将MCU采集的传感器数据实时上传至云端服务平台。
2.6 GPRS模块
GPRS模块可连接至周边基站,若有紧急情况,则可向进入团雾范围内的车辆发送短信,通知险情。
2.7 MCU主控
文中系统采用的处理器是STM32F103CET6核心版,其工作主频为72 MHz,满足了对传感器数据采集、处理和发送的需求,并且有5个通用串口,用于连接各个模块,并且自带512K字节FLASH,满足了数据缓存需求[13-15]。
3 团雾等级划分
通过在多端高速路实地调研测试,并结合相关区域管控措施[16],研究给出了用于划分团雾等级的指标,如表2所示。
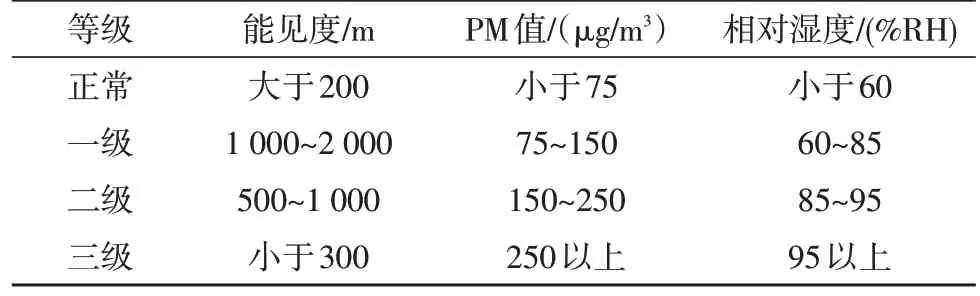
表2 团雾等级与指标
表2的3项指标中考虑了不同条件下团雾的形成,即由空气颗粒物产生或者空气中的水蒸气产生。其中,任意两项达到相应的数值范围即可判定为相应的团雾等级。
4 数据处理与控制策略
4.1 软件设计
软件设计流程图如图4所示。
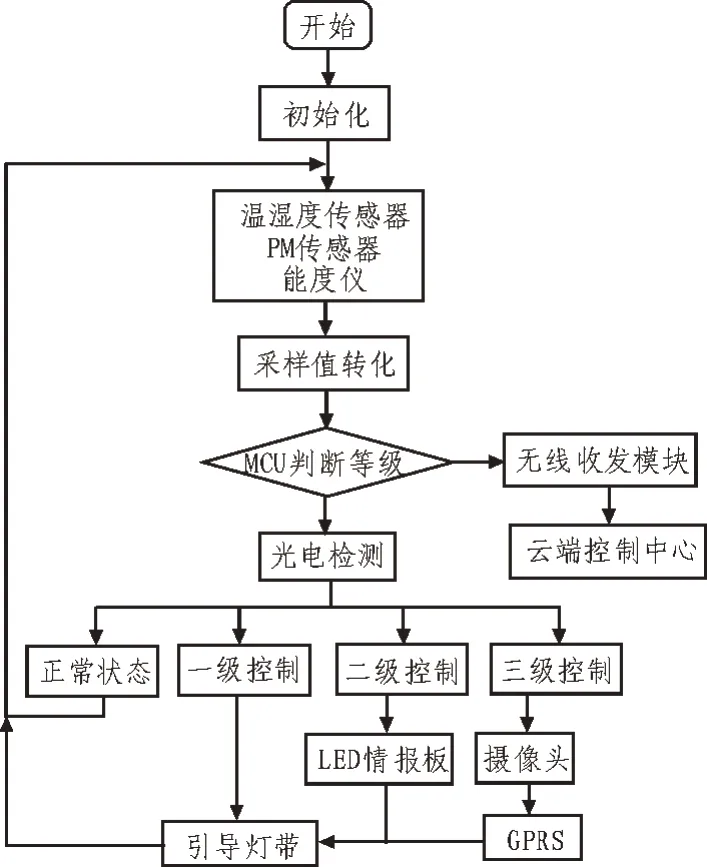
图4 MC程序流程图
1)初始化。开启STM32的时钟、串口、中断、ADC和配置优先级,再进行温湿度传感器配置、PM传感器初始化、能见度仪初始化。
2)采样值转化。通过定时中断获取各传感器数值,并将ADC采样的数值进行运算转化,读取串口帧格式获取能见度,通过SCCB协议将摄像头图像缓存。
3)MCU判断等级。STM32根据各传感器数据,结合团雾等级划分指标给出合理控制等级,并将数据封装成帧交给无线收发模块,进而发送至云端控制中心。
4)光电检测与分级控制。光电检测可判断道路交通状况和行车位置,然后控制诱导灯带。LED情报板会根据团雾等级发布相应的公告,当达到3级时进一步启动实时监控和GPRS模块。
5)上位机接收数据。上位机通过无线收发模块接收数据,并能做出处理。
4.2 控制策略
1)诱导。如图5所示,诱导灯相聚50 m,当传感器检测到车辆后,会自动开启前方两个和后方一个诱导灯,让车辆安全通过团雾区。若车辆在限定阈值时间内未通过下一个光电传感器,则相应的诱导灯闪烁报警,并上报路况问题。后车可依据前方点亮的灯来判断路况,同时跟前车保持安全距离。
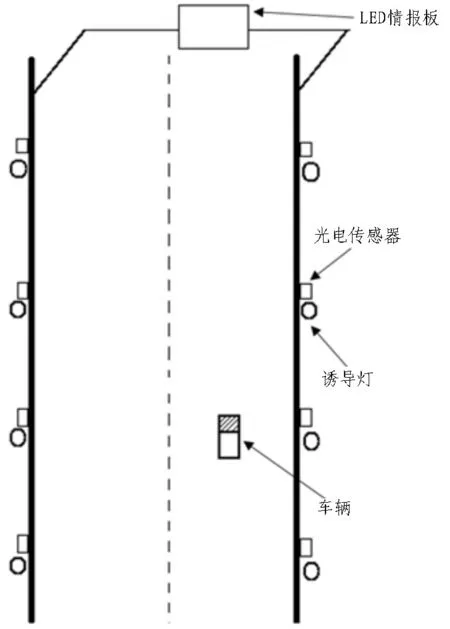
图5 分级诱导系统
2)分级。达到一级时,启用黄色诱导灯,定时上传道路路况图像;二级时,启用红色诱导灯,实时上传路况图像,LED情报板告警;三级时,启用红色诱导灯,实时上传路况图像情报板告警,道路限流。
5 系统测试结果
系统经过实验室环境模拟以及陕西省内多段高速公路实地测试,相关系统参数如表3所示。
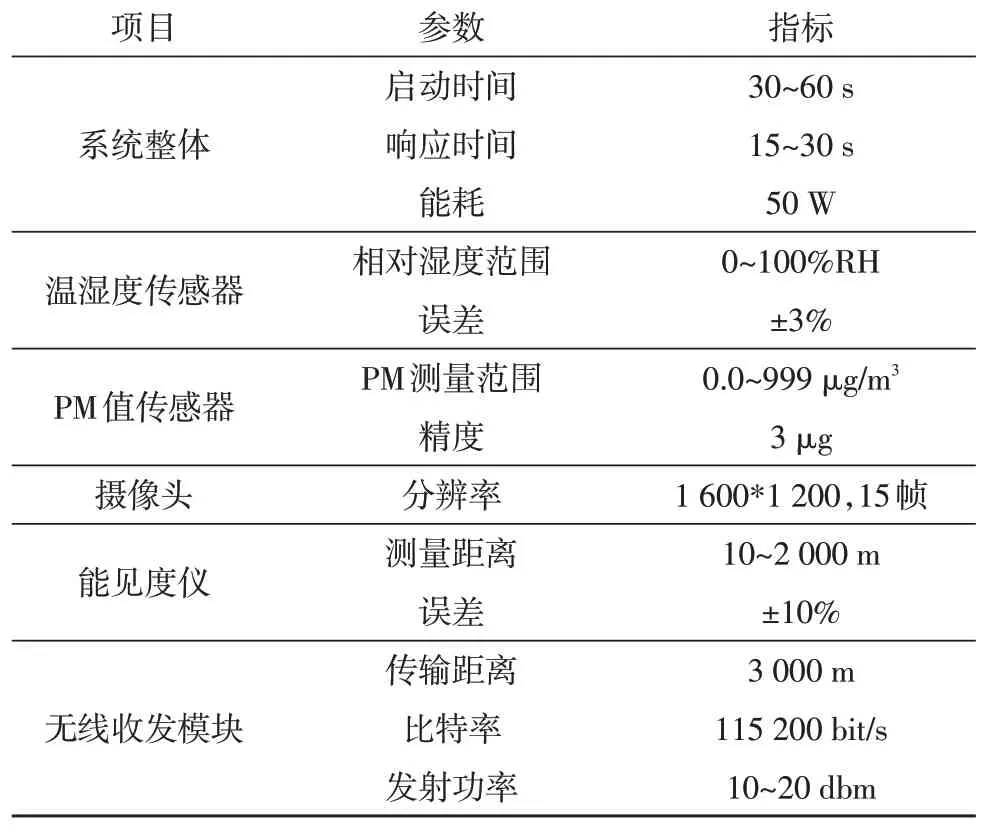
表3 系统各项参数
系统经过多次验证,在实验室模拟水汽环境下,温、湿度传感器在5 s内给出告警,能见度仪能捕捉变化。在实际高速公路测量中,PM传感器捕捉的常规PM范围在75~150μg/m3之间,常规大气能见度在2 000 m以上。在有团雾出现时,由于形成条件不同,PM值会保持在150μg/m3或者能见度小于1 km,系统能正确捕捉摄像头拍摄的画面,在30 s内传输至上位机,并显示相应路段交通状况。
在道路控制部分,光电传感器能够判断车辆位置,开启相应诱导灯,当达到二级时,LED告示板就会发出警告;当达到三级时,GPRS模块会向服务范围内的手机发送短信通知。
6 结束语
文中主要实现了一种高速公路团雾天气下预警和管控系统,此系统应用了多传感器技术,能迅速准确地检测出团雾天气变化,并且满足相应管控的基本需求。应用道路控制系统能实时管控车辆运行情况,并且保持了前后两车的安全距离,为复杂天气交通运输提供了可靠的应用方案。相较于先前的研究[17-18],在系统响应速度上提升了50%,探测范围提升了20%,具有实用价值和广泛的参考意义。
猜你喜欢
中国交通信息化(2023年1期)2023-03-18
中国交通信息化(2022年9期)2022-10-28
汽车工程师(2021年12期)2022-01-18
传媒评论(2018年11期)2018-02-16
中国交通信息化(2016年6期)2016-06-06
海洋气象学报(2016年3期)2016-02-28
气象研究与应用(2016年4期)2016-02-27
中国交通信息化(2015年3期)2015-06-05
汽车维修与保养(2015年8期)2015-04-17