基于CD4046的激光陀螺机械抖动控制技术
2021-09-05 11:43王昊仁马家君
电子设计工程 2021年17期
王昊仁,马家君,曾 维,王 媛
(贵州大学大数据与信息工程学院,贵州 贵阳 550025)
激光陀螺利用两束相向激光的频差测量陀螺转动角速度,具有精度高、比例因子非线性度好等优点,被广泛应用于航空、航海等领域的姿态控制[1]。闭锁现象会为激光陀螺带来误差,采用不同的偏频技术消除闭锁现象成为激光陀螺研究的关键[2]。目前,机械抖动偏频是最成熟和应用最广泛的偏频技术,该技术通过在激光陀螺输出信号中加入机械抖动信号,使陀螺绝大部分时间工作在锁区之外,并在机械抖动信号中注入随机噪声,从而消除陀螺闭锁效应带来的误差[3-5]。
然而,在激光陀螺工程应用中,环境温度的变化会引起抖动机构谐振频率漂移[6]。因此,需要机械抖动控制系统跟踪抖动机构谐振频率[7]。文献[8]基于单片机对自激振荡动机械抖动控制频率跟踪技术进行了分析,得出跟踪精度达到0.1 Hz。文献[9]的研究表明,采用锁相环可以有效提高抗干扰能力。目前,激光陀螺电路主要采用单片机控制,而锁相环难以在单片机中实现,因此,研究基于锁相环芯片CD4046的机械抖动控制系统对提高激光陀螺性能具有重要的意义。
文中分析了激光陀螺机械抖动偏频原理,基于CD4046设计了激光陀螺机械抖动控制系统,该系统包括抖动反馈检测模块、抖动辐度控制模块和噪声注入模块。同时,分析了CD4046锁相环跟踪性能,对基于CD4046锁相环抖动控制系统的频率跟踪精度进行了实验测试,并与采用自激振荡抖动控制系统的随机游走和零偏误差进行了对比。
1 激光陀螺抖动偏频
激光陀螺锁区方程可以表示为:

式中,ψ为拍频信号的瞬时相位,a为输入角速率,b为锁定阈值。加入机械抖动的激光陀螺锁区方程为:

其中,α为机械抖动幅度,ωD为机械抖动角频率,对式(2)进行第一类贝塞尔函数展开,有[10]:

式(3)中,r为激光陀螺比例因子,上述方程表明,当引入正弦抖动时,零角速率附近的锁定区域分布在抖动频率的倍数处,第i个动态锁区的宽度为bJi(α/ωD),αωD表示抖动角幅度。根据贝塞尔函数的性质可知,如果i增大,则Ji(α/ωD)会迅速减小,所以i=0或1时的锁区对激光陀螺精度影响最大。通常抖动角幅度的值至少要大于激光陀螺闭锁阈值的100倍以上。在抖动信号中加入随机噪声可以使机械抖动信号的抖动幅度随机化,进而使动态锁区消失[11-12]。i=0、1、2时的第一类贝塞尔函数如图1所示。
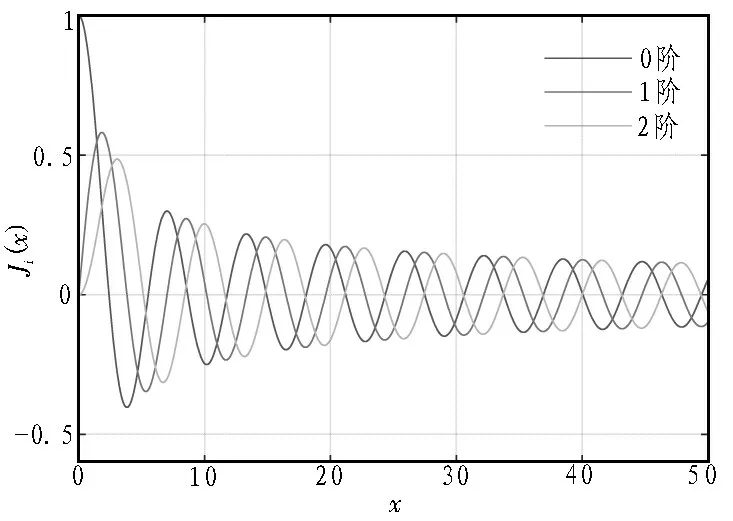
图1 i=0、1、2时的第一类贝塞尔函数
2 系统总体设计
CD4046是TI公司的一款锁相环芯片,具有电源电压范围广、输入阻抗高和动态功耗小等特点,中心频率为10 kHz时,其功耗仅有600μW,芯片采用16个引脚双列直插封装。基于CD4046芯片的激光陀螺机械抖动控制系统主要由抖动反馈检测电路、CD4046锁相环芯片、随机噪声发生器、抖动幅度控制器、PWM脉冲宽度调制器、抖动驱动电路六部分组成,其系统结构如图2所示。
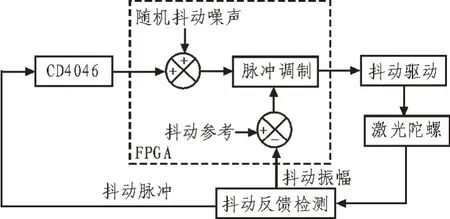
图2 激光陀螺机械抖动控制系统
在图2中,抖动反馈信号进入抖动反馈检测电路,并产生抖动方波信号和抖动幅度信号,抖动方波信号进入CD4046锁相环芯片,并通过CD4046跟踪抖动机构谐振频率。抖动幅度控制及随机噪声注入通过脉宽调制实现,并通过抖动驱动实现激光陀螺机械抖动控制。
2.1 锁相环CD4046
激光陀螺抖动机构为典型的二阶振荡环节,其幅频相频特性如图3所示。
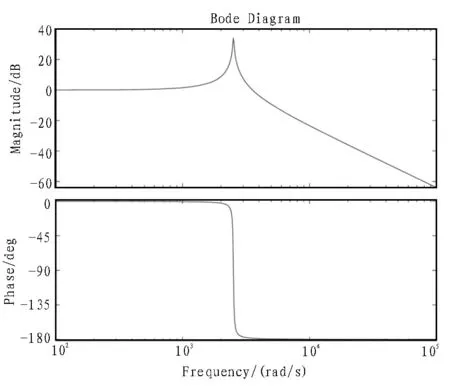
图3 激光陀螺抖动机构幅频相频特性
由图3可知,当抖动频率为抖动机构谐振频率时,抖动机构产生-90°的相移[13-14]。在中心频率处,采用异或门鉴相器的锁相环会产生90°的相移,从而补偿抖动机构的相移。当抖动机构谐振频率发生变化时,锁相环根据相位误差调整驱动频率,从而实现对抖动机构谐振频率的跟踪。CD4046锁相环主要由异或门鉴相器、数字环路低通滤波和数字控制振荡器三部分组成。抖动反馈检测电路输出的方波信号经过CD4046的14引脚输入,需要采用异或门来检测输入信号相位与反馈信号相位之间的相位差。用K计数器作为环路低通滤波器,该滤波器由加计数器与减计数器组成,且两者相互独立。经过环路低通滤波器后,可以有效滤除干扰信号。K计数器的计数范围为0~K-1,通常K取2的整数次幂。当计数值大于或等于K/2时,加法器输出进位信号,减法器输出借位信号。滤波器输出的进位和借位信号进入由ID计数器构成的数字压控振荡器,每一个进位信号会使ID计数器输出脉冲提前、借位信号使脉冲滞后。最后经过N计数器分频器获得锁相环输出。当两个信号相位误差小于或等于该相位比较器的固定相位差时,锁相环锁定。锁定频率作为模拟开关的控制信号,一方面控制抖动频率,另一方面该频率经过分频、移位后作为加噪部分伪随机序列的频率。CD4046锁相环结构图如图4所示。
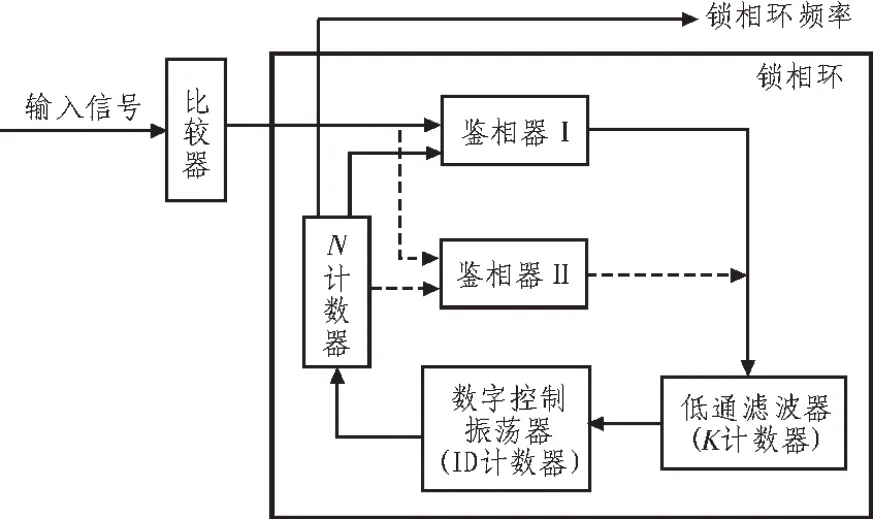
图4 CD4046锁相环结构图
CD4046锁相环外围电路如图5所示。设置电阻R23为3.3 kΩ,电容C5为0.22μF,电阻R24为88 kΩ,则锁相环中心频率为450 Hz,锁频范围为300~600 Hz。
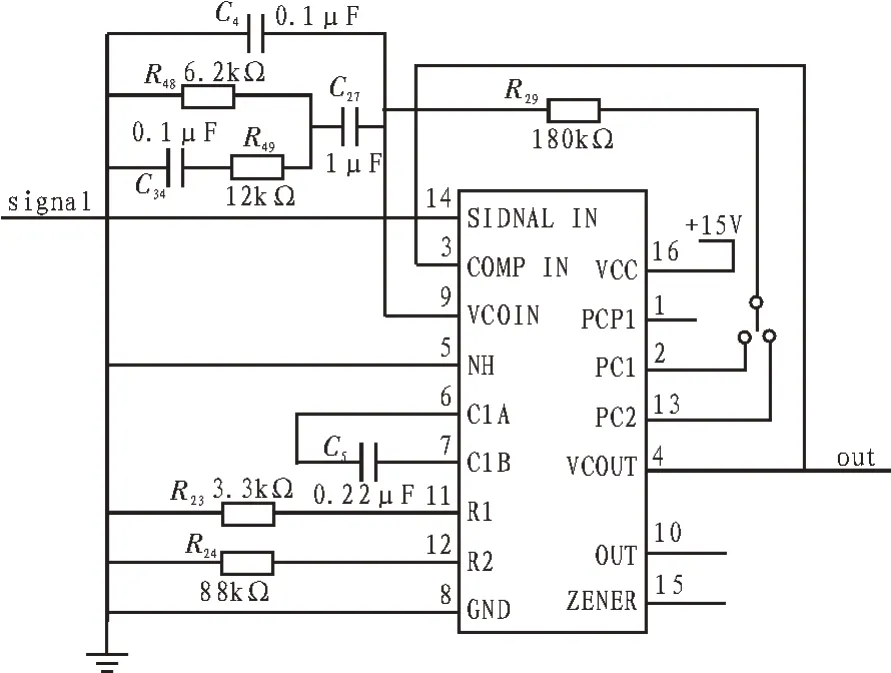
图5 CD4046锁相环电路原理图
2.2 锁相环误差分析
根据锁相环的结构,其输入信号与输出信号相位的传递函数为[15]:

式(4)中,2Mf0/NK为开环增益,f0为CD4046锁相环的中心频率,M为锁相环时钟频率与锁相环中心频率之比,N为N计数器的分频系数。通过式(4)可知,锁相环的相位传递函数是一阶系统,该系统具有很强的抗外界干扰能力。锁相环相位误差的传递函数可表示为:

式(5)中,(s)为相位误差的拉普拉斯变换。根据s域终值定理,当s趋近与零时,相位误差为:

式(6)中,Δω为斜坡信号的变化率。由式(6)可知,增大锁相环的开环增益2Mf0/NK,可以有效减小锁相环的相位误差。
2.3 抖动幅值控制与噪声注入
反馈信号一般幅值比较大,经过分压后进入半波整流电路,半波整流信号与抖动参考信号相减再进行积分就可以得到一个稳定的直流信号。原理框图如图6所示。
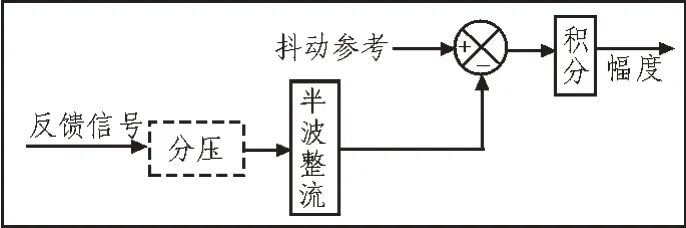
图6 抖动辐值控制原理图
抖动随机噪声采用伪随机序列,通过24位移位寄存器实现,从第16位和第23位通过异或门[16],其最长周期为223-1,噪声频率由锁相环输出频率作为模拟开关控制信号,从而将该频率信号通过6位二进制乘法器SN7497,在外部频率控制开关的控制下进行分频,SN7497输出频率fout和输入频率fin的关系为:
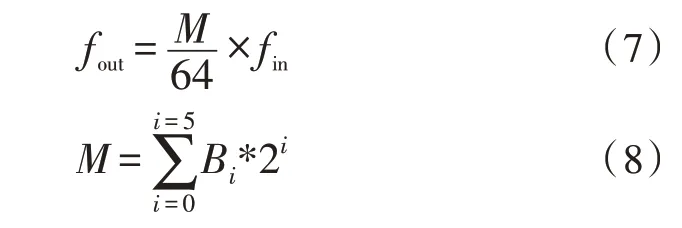
式(8)中,B0~B5为SN7497的6个输入引脚,高电平有效。
3 实验分析与讨论
在实验过程中,将激光陀螺放在高低温箱中,通过激光陀螺测试对其进行供电,陀螺输出数据通过RS422串口传输到计算机,通过调试测试软件可以实现激光陀螺抖动频率、偏频量等参数的观测。实验环境如图7所示。

图7 实验环境图
设CD4046锁相环的中心频率为450 Hz,N=2M,K=3,则锁相环同步频率最大为150 Hz,只要抖动频率在150 Hz内,锁相环就能自动跟踪频率。在变温度条件下,对机械抖动频率不同的激光陀螺用该系统锁相环进行频率追踪测试。首先将激光陀螺放在温箱中,设置温箱温度为20℃并且保持2小时,设置1℃/min的温度变化速度,并使温箱温度先降低到-40℃,再提高到60℃,最后再降低到20℃,在这3个温度点都各保温2小时,实验结果如表1所示。
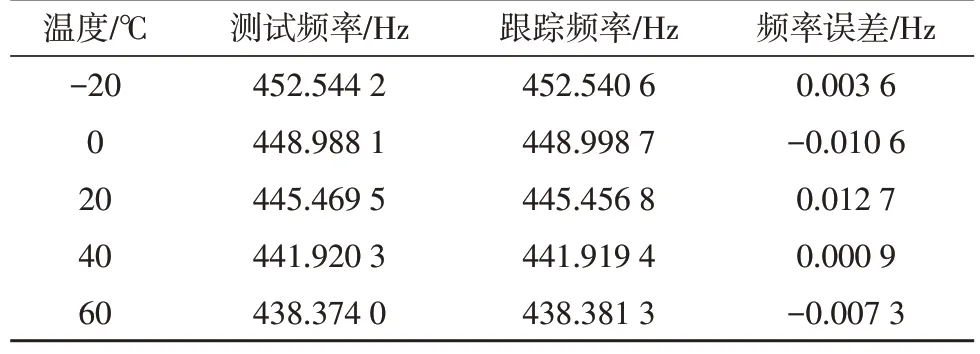
表1 不同温度下的频率跟踪误差
对于现有的CD4046锁相环机械抖动控制系统与原有采用自激振荡机械抖动控制系统,在相同变温条件下进行零偏稳定性与随机游走误差对比测试,结果如表2所示
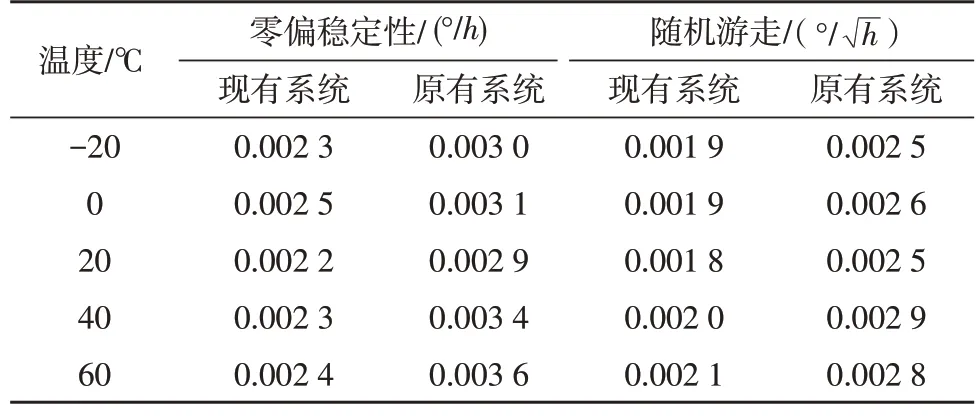
表2 变温下现有系统与原有系统性能对比
实验表明,基于CD4046锁相环芯片的激光陀螺机械抖动控制系统能保证在全温范围内的谐振频率跟踪精度在0.015 Hz以下,并且与原有自激振荡机械抖动控制系统相比,零偏稳定性与随机游走误差都减少了20%以上,提高了激光陀螺精度并达到激光陀螺的使用要求。
4 结 论
根据激光陀螺抖动机构幅频相频特性,基于CD4046锁相环芯片设计了激光陀螺机械抖动控制系统。锁相环芯片可以补偿抖动机构的相移,增大锁相环的开环增益,可以提高锁相环频率跟踪精度。采用模拟开关实现的随机噪声注入系统可以在分数倍的抖动频率下实现激光陀螺随机噪声的注入。实验结果表明,与原有机械抖动控制系统相比,该机械抖动控制系统能在变温环境下保证锁相环不失锁,并且频率追踪误差小于0.015 Hz,谐振频率跟踪精度提高了一个数量级,激光陀螺性能提高了20%。
猜你喜欢
煤气与热力(2022年2期)2022-03-09
小学生学习指导(低年级)(2019年10期)2019-10-16
学生天地(2019年6期)2019-03-07
军事文摘(2018年24期)2018-12-26
快乐语文(2018年36期)2018-03-12
电测与仪表(2016年5期)2016-04-22
湖北师范大学学报(自然科学版)(2015年1期)2016-01-10
电测与仪表(2015年9期)2015-04-09
电测与仪表(2014年8期)2014-04-04
河南科技(2014年10期)2014-02-27