基于因子分析与改进K-means聚类的交通状态判别
2021-09-03 09:48:00高艳艳陈秀锋曲大义
青岛理工大学学报 2021年4期
高艳艳,陈秀锋,曲大义,陈 伟
(青岛理工大学 机械与汽车工程学院,青岛266525)
随着我国经济水平的提高,汽车保有量迅速增加,城市交通拥堵接踵而至。及时、准确地提供道路交通状态信息,出行者可以根据有效信息选择合适的交通工具以及出行时间点;交通组织者可以获取实时道路交通状态,采取交通控制和诱导对策,从而有效提高城市出行效率,缓解路网交通拥堵。
目前,交通状态判别主要从两方面开展:判别指标、判别方法。城市道路交通状态的判别指标主要有流量、速度、占有率、密度和平均延误等[1-3],关伟等[4]对不同密度下的交通速度分布特性进行综合分析,最终把一个城市道路交通流划分为4种状态;戴学臻等[5]选取的判别指标为车辆平均行程车速、道路网延误时间比,利用集对化的分析方法与三角模糊化函数方法进行实时耦合,构建了城市道路交通运行状态识别模型;黄艳国等[6]选择了3个样本数据信息:流量、速度、占有率,并明确提出了一种道路交通运行状态实时化的判别分析方法,这种判别方法采用的是模糊C均值聚类算法。K-means聚类算法是判断城市道路状况最常用的方法之一,然而,由于聚类数的确定难度大,对初始聚类中心选择更是无统一标准,最终导致交通状态判别结果与实际城市交通状态不相匹配,这就需要对聚类数和聚类中心进行优化。针对这些问题,FAYYAD U等[7]明确提出选择多次迭代来更新采样数据以获得初始值,从而解决K-means算法严重依赖于初始聚类中心选择的问题;卞彩峰等[8]采用粒计算,这一算法属性分辨能力较强,利用这一优点,使聚类有效性函数对属性值依赖降低,最终获取最佳聚类数。
交通流参数选取具有一定的随机性,往往会影响判别结果的准确性。K-means聚类算法在一定程度上取得了实际效果,不过只是对聚类数和初始聚类中心进行单一优化,并未将两者结合在一起,仍存在一定的不足。本文利用因子分析方法,对多个变量进行相关性分析,选取出合适的交通流参数,作为交通判别指标,并结合改进K-means聚类算法,探究交通流的运行情况,从而对城市快速路交通状态进行判别。
1 数据采集及指标的选取
1.1 数据的采集与处理
本文所研究的对象是某城市约10 km快速路,交通流数据由两部分组成:①感应线圈检测器进行采集分析得到,包括流量q、速度v、占有率o。数据采集时间为某一个工作日0:00—24:00,每次数据采集时间间隔为5 min。该路段上某一截面命名为S,共有4条车道,每条车道上各有一个感应线圈检测器,分别为S1,S2,S3,S4。数据类型如表1所示。②行程时间t数据,利用Vissim仿真软件,根据实测数据进行标定得到。
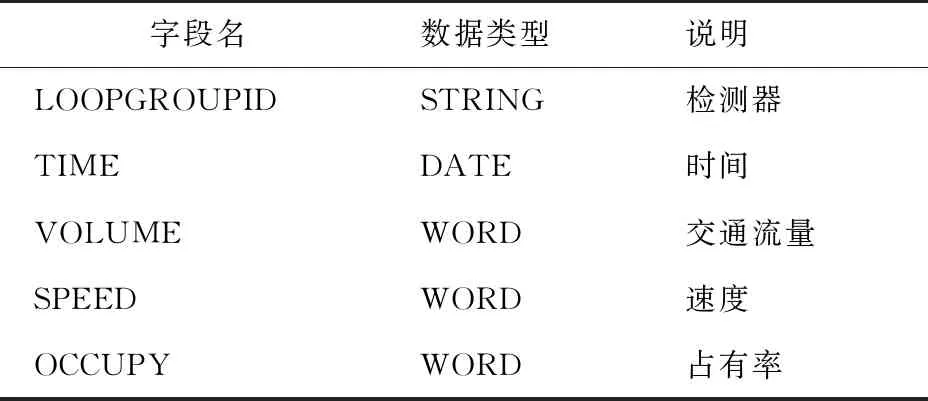
表1 数据类型
感应线圈检测器共收集原始数据852条,缺失12条,为了保证结果更加准确,现需要将缺失数据进行补充完整,数据具体处理方法如下:
1) 缺失数据的补充。由于本文数据仅缺失12条,属于少量数据缺失范畴,数据采集时间间隔较短,所以行驶状态不会发生太大的变化,基于以上特性,为保持数据的完整性,同时也要求计算简单,收敛性好,故采用分段线性插值法对数据进行补充。
分段线性插值法采用的函数是分段线性插值函数,用直线将两个相邻的数据点连接。要求一个点的数值,假设与其相邻的两个节点是(xm,ym)和(xn,yn),具体求值方法如式(1)所示。
(1)
2) 数据的合成。本文数据是由4个车道所测数据组成,需要将每个车道上的数据合成为一个截面的数据[9],合成数据方法如式(2)所示。
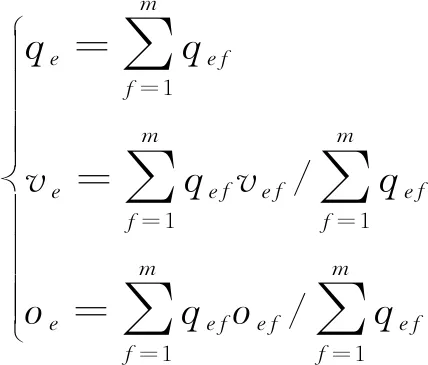
(2)
式中:qe为截面e的流量;ve为截面e的速度;oe为截面e的占有率;f为车道编号;m为截面车道数。
1.2 交通流参数的选取
交通流参数的选取和算法的应用效果密切相关,选择的交通参数要能够准确反映交通状态变化规律。结合交通流数据来源以及特点,本文选取8个交通流参数,分别为流量q、速度v、占有率o、密度k、行程时间t、饱和度s、占有率/流量(o/q)、占有率/速度(o/v),其中q,v,o通过合成公式(2)计算得到,k,s,o/q,o/v在原有数据基础上,通过计算和处理得到,行程时间t由Vissim仿真获得。
2 因子分析
所谓因子分析,就是保持原有信息不发生任何的变化,将具有相同特性的变量划分到同一个因子中,实现数据的简化、指标的降维,从而简化因子分析过程[10]。
2.1 因子可行性验证
本文采用KMO(Kaiser-Meyer-Olkin)和Bartlett球形(Bartlett's Test of Sphericity)两种检验方法,检验8个交通流参数是否适合因子分析[11]。使用Spss软件进行检验,结果如表2所示,KMO结果为0.790>0.6,表明8个交通流之间存在较好的相关性。Bartlett球形假设检验显著性为0,拒绝零假设,表明相关系数矩阵不是单位阵,适合进行因子分析。
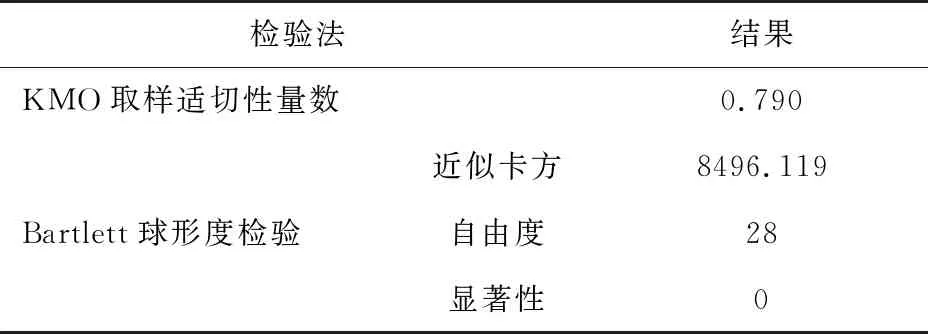
表2 KMO和Bartlett检验结果
2.2 主因子的提取
主因子提取通常采用不小于85%的累积方差贡献率来确定主成分的数量。如表3所示,前2个主因子累积方差贡献率为98.052%,大于85%,符合判断标准。因此,选取前2个主因子进行分析。
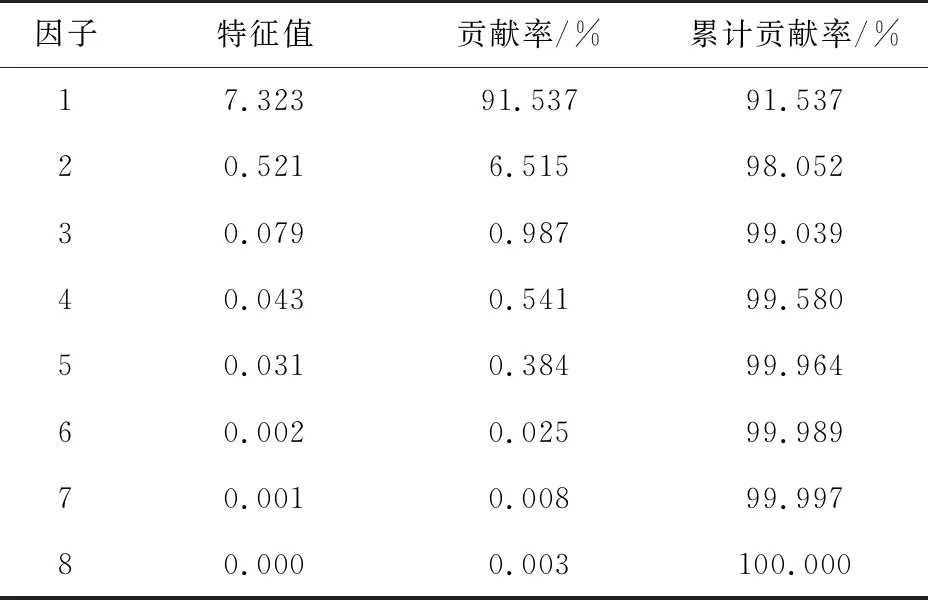
表3 各因子解释原有指标总方差情况
表4所示为因子载荷矩阵,显示出2个主因子在8个交通流参数上的载荷,通过分析得出以下个结论:
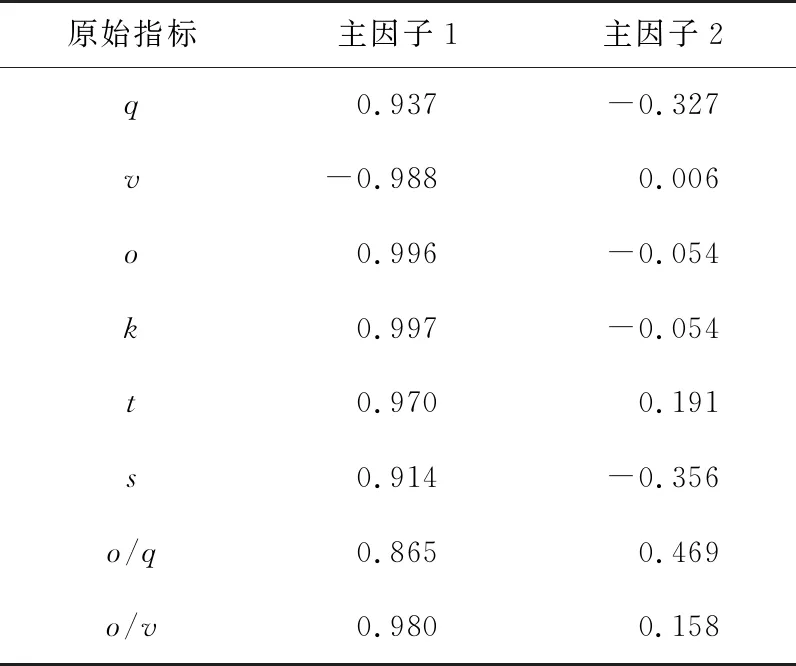
表4 主成分载荷矩阵
1) 主因子1与8个交通流参数的相关性均在0.8以上,此数据显示,主因子1与各交通参数都具有很强的相关性。无论是负相关还是正相关,为了符合实际,需进行因子旋转。
2) 主因子2与q、s、o/q相对于其他指标具有较强的相关性。
2.3 因子旋转
本文采用凯撒正态化最大方差法对2个主因子进行因子旋转。表5所示为因子旋转后主因子1,2对8个交通流参数的载荷。
由表5可知,旋转后的主因子1与q,v,o/v相关性较大;旋转后的主因子2与8个交通参数指标相关性还是很弱,综合考虑,剔除主因子2,仅保留主因子1。综上所述,因子分析从8个交通流参数中最终提取出q,v,o/v3个交通参数作为交通状态判别指标。
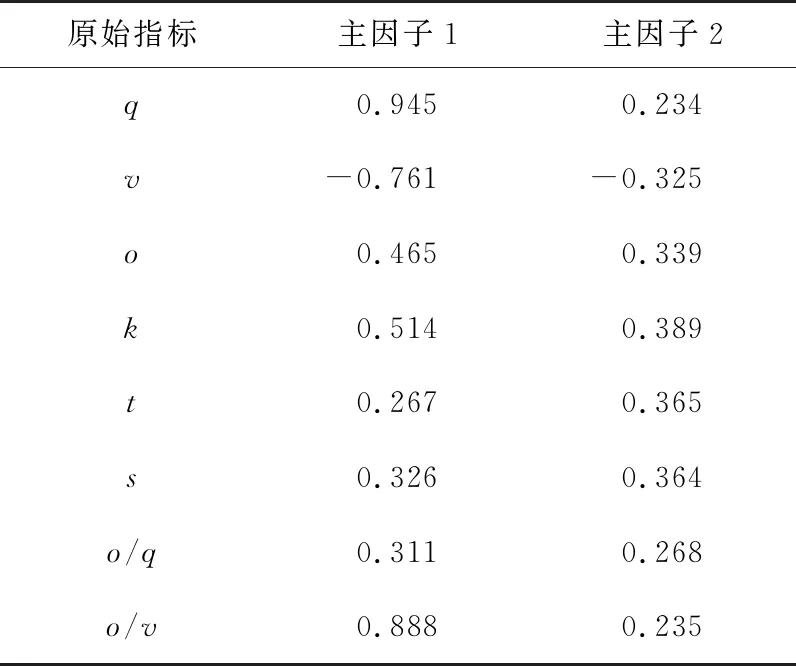
表5 旋转后的因子载荷矩阵
3 基于改进K-means聚类的交通状态判别
3.1 改进K-means聚类算法
K-means聚类算法根据样本之间的距离或相似度,把相似度高、差异小的样本聚类为一类,最后形成多个类别,使得同一个类别内的样本具有高相似度,不同类别间差异性大,聚类速度快,方法简单。但传统的K-means聚类算法仍存在一定不足:①聚类数K很难确定;②初始聚类中心选取随意。为了解决以上问题,本文提出了一种改进K-means聚类算法。
改进K-means聚类算法的思路如下:假设要将n个样本数据Y={Yi|i=1,2,...,n}划分为K类,用B={Bj|j=1,2,...,K}分别表示K种交通状态,C1点为首个初始聚类中心点,C={Cj|j=2,3,...,K}为后续初始聚类中心。

Step3:求出每个数据与初始聚类中心的距离D(Yi,Cj),i=1,2,...,n,j=1,2,...,K,根据求出的距离,按照距离最短原则,将每个数据归到相应的类别中,即满足D(Yi,Cj)=min{D(Yi,Cj)},则Yi∈Zj;
Step7:通过指标值比较选择最佳的K值,使IDB指标达到最优;
Step8:输出最优聚类数K以及满足聚类准则函数收敛性的K个聚类集。
3.2 交通状态分类及判别效果分析
将改进K-means算法应用到处理好的289组交通流参数数据中,通过因子分析提取q,v,o/v3个判别指标,计算出初始聚类中心,最后输出最佳聚类数K=4,如表6所示,参照相关已有研究成果将交通运行状态命名为自由流状态、稳定流状态、拥挤流状态和阻塞流状态[12]。
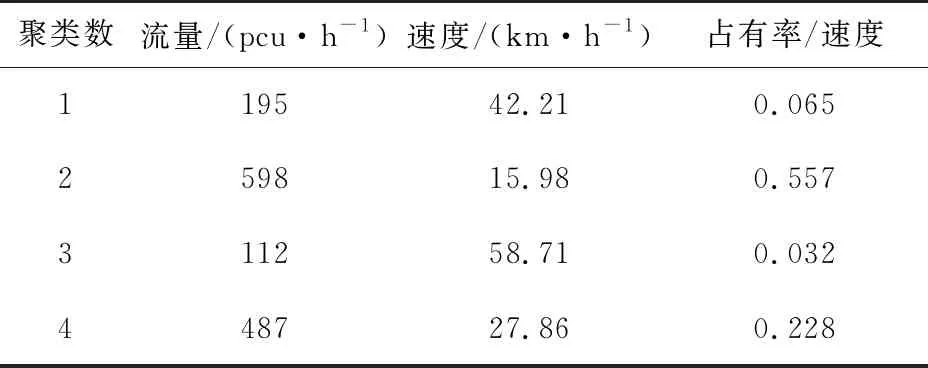
表6 初始聚类中心
使用Spss软件对数据进行交通状态判别分析,选取初始聚类中心,设置K=4,经过16次迭代,聚类中心的变化可忽略不计时,从而达到聚合的目的,将所有的数据划分为4类。表7所示为最终聚类中心。图1所示为截面S通过Spss检验最终得到的全天24 h交通状态判别结果,图2所示为Origin绘制的4种交通状态下的交通流基本参数关系。
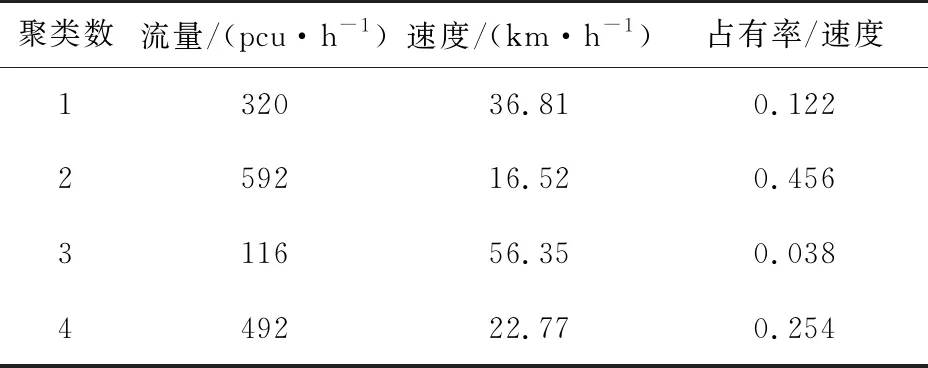
表7 最终聚类中心
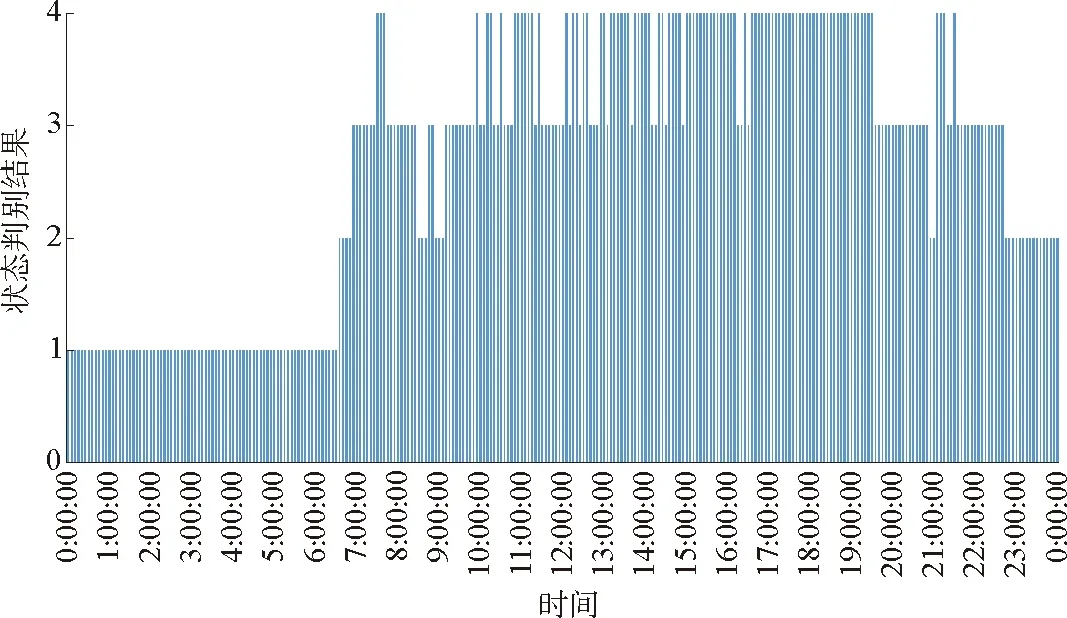
图1 截面S交通状态判别结果
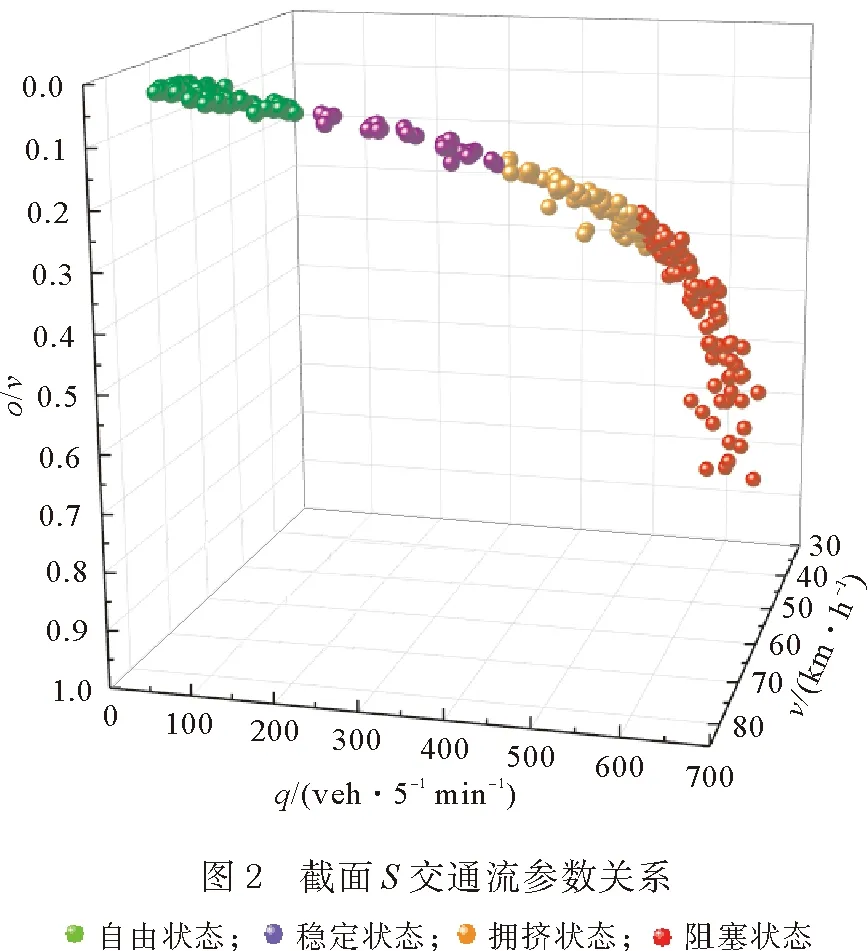
图1纵轴1—4分别代表自由流状态、稳定流状态、拥挤流状态、阻塞流状态,数据共有289组。其中自由流状态为94组,占比32.53%;稳定流状态为88组,占比30.45%;拥挤流状态为28组,占比9.69%;阻塞流状态为79组,占比27.34%。由图1、图2可知,该快速路道路状况基本畅通,大多数拥堵主要集中在早晚高峰,说明本文方法能有效地对交通运行状态进行分类,且与实际状况相符。
3.3 对比分析
本文以判别率和误判率为指标,根据上述获取的交通流数据,分别使用传统K-means算法和改进K-means算法对其进行交通状态判别,与道路实际运行状况相比,得到4种交通状态下的判别率和误判率,如表8所示。
从表8可以看出,在4种交通状态下,改进K-means算法判别率为97.21%,误判率为0.74%,其判别精度比传统K-means算法提高了8.13%,误判率降低了1.05%。由此可见,改进K-means算法可获得较好的判别效果,在交通状态判别上具有一定的优势。

表8 交通状态判别效果对比 %
4 结论
1) 传统交通状态判别指标的选取都是按照一定的标准和规定,进行直接选取,本文采用因子分析,从q,v,o,k,t,s,o/q,o/v8个交通流参数中,提取出q,v,o/v最为适合的3个交通状态判别指标。减少交通流参数的选取对算法应用效果的影响,更好地呈现交通状态变化规律。
2) 改进K-means聚类算法创新点在于建立了交通状态判别综合评价函数,将聚类数K和初始聚类中心同步进行优化。
3) 本文将因子分析与改进K-means聚类算法相结合在一起,通过实例验证,这种方法对快速路交通运行状态可以有效判别。
猜你喜欢
现代家电(2019年21期)2019-12-28 02:53:10
电子测试(2017年15期)2017-12-18 07:19:27
电子技术与软件工程(2017年4期)2017-03-27 14:54:44
西南交通大学学报(2016年3期)2016-06-15 20:29:35
中国工程咨询(2016年1期)2016-02-14 06:47:44
智能系统学报(2015年4期)2015-12-27 09:38:39
少年体育训练(2015年7期)2015-12-05 10:09:05
中国服饰(2014年11期)2015-04-17 06:48:50
电子设计工程(2015年6期)2015-02-27 12:04:53
数学年刊A辑(中文版)(2014年1期)2014-10-30 01:48:12