
果园株间除草装置的优化设计
2021-09-02 08:14梁晓兵
新疆农机化 2021年4期
梁晓兵
(河南机电职业学院,河南郑州451191)
0 引言
2019年新疆特色林果业种植面积为165万hm2,果实产量达1 729.44万t,相比2018年增长了7.8%[1],新疆特色林果业种植已形成较大规模,在全国占有重要地位,是新疆经济发展的重要保障。目前,林果业全程机械化作业进程中果树之间的杂草清除较为困难,依旧采用人工清除杂草的方式,幼年果树株间相邻区域杂草生长迅猛,对幼年果树的成活率和产值时间影响较大[2],且清除杂草耗时耗力,严重影响其经济效益,因此果园管理过程中株间除草装置必不可少。
国外农机产业较为发达,除草机械设备十分成熟。德国的A.SL JH和Singh S等人将旋耕装置与农用机械动力输出轴相连接,组装成一种新型果园整地机械[3];意大利农机厂商Rinieri自主研发了一种适用于清除果树株间杂草的机械设备[4];德国农机企业Dutzi研发了一种果园作业机械的专用刀具,其结构形式为齿状旋耕刀[5]。由于国外果园除草设备与我国的作业工况和农艺要求不符,且机械自动化程度较高,修理困难、维修成本较高,因此国内使用较少。我国对株间除草机械的研究主要集中在高校与科研院所,大多数处于试验阶段,还未进行推广应用。目前市场上的果园除草设备大多是小型的耕耘机,生产效率低、适用性差,在作业过程中存在少耕、漏耕或伤树等现象[6],后续仍需人工再次耕作,此耕作方式不能满足目前新疆果园的需求[7-8]。
综上所述,为了去除果园株间杂草,提高机械除草作业效率,降低漏耕率与伤树率,设计了一种果园株间除草装置,能实现果树株间除草与避让,根据作业工况要求,通过理论分析,建立其避让执行机构数学模型,确定机构各参数之间的关系,运用MathCAD和Lingo两款软件对机构中的液压缸参数进行优化设计,为果园设备的研制提供理论依据和参考。
1 果园除草装置
1.1 整机结构
果园除草装置由行间和株间除草两大装置组成。株间除草装置主要由触碰杆、液压缸、刀轴与刀具等组成,可连接在行间装置的单侧或两侧。行间装置通过悬挂连接动力配套设备,株间除草装置的液压总成与动力配套设备液压驱动相连接,整机结构如图1。
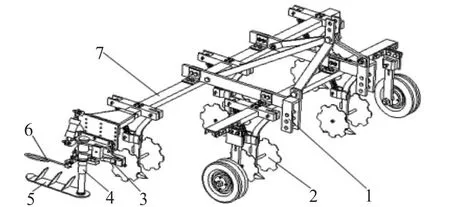
图1 整机结构示意
1.2 工作原理
在除草作业过程中,拖拉机牵引除草装置前进,株间除草装置的刀具处于两果树株间并垂直于机具前进方向,触碰杆处于未受力状态,此时株间除草装置为直线作业方式,如图3(a);随着机具不断前进,当触碰杆与果树相遇,触碰杆受力会绕果树进行转动,转动角度大于特定幅值时触碰压力控制阀,控制执行机构驱动液压油缸运动,执行机构将液压油缸水平方向的直线运动转换成刀具竖直方向的旋转运动,改变刀具的运动轨迹,使其避开果树,如图3(b),此过程中触碰杆受力作为系统信号输入,执行机构作为系统执行部件;触碰杆无受力时系统无信号输入,压力控制阀关闭,执行机构驱动刀具回转,保持正常直线作业方式,如图3(d)。为了保持稳定的作业质量,除草作业过程中执行机构液压油缸为保压状态。工作原理如图2。
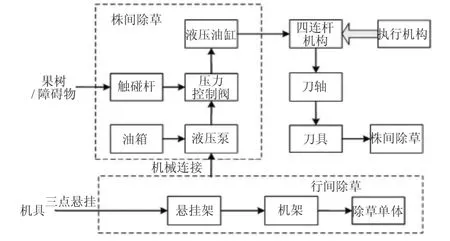
图2 整机工作原理
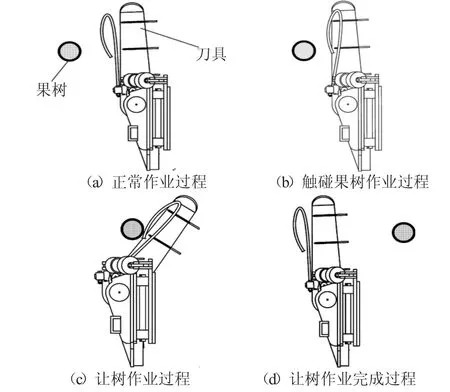
图3 果园株间除草装置工作原理
1.3 果园株间作业要求
果园作业不同于田间作业,田间作业的作业对象是空旷的田地或者是成垄的农作物,其作业可分为播种前整地作业以及中耕施肥两类,播种前整地作业时田间空旷无作物,只需按照顺序耕地,此过程中整地机械作业方式为无障碍的宽幅作业。中耕施肥是按照作物种植行间方向进行耕作,此时为直线作业。而果园作业对象是果树,行间与株间都需要除草,因此果园除草作业时将除去株间杂草而不损伤果树作为除草作业的目标,此时果树成为了除草机作业时必须考虑的避让物体,除草设备靠近果树时必须改变作业路径避开果树,避免损伤果树,降低刀具磨损。机具在普通田间作业路径与果园作业路径如图4。
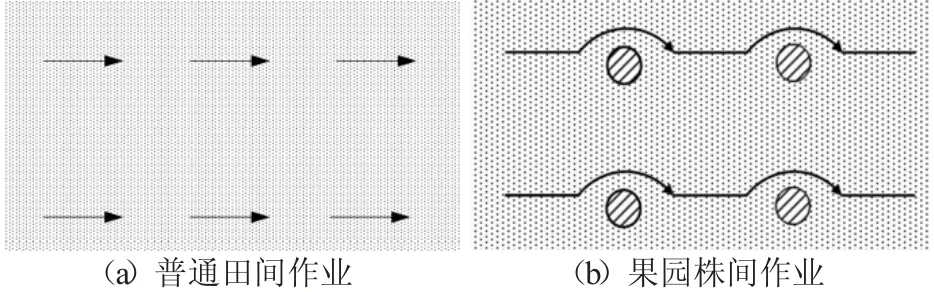
图4 不同的作业路径
1.4 存在的问题
果园株间除草装置由液压缸驱动刀具,所以液压缸的参数与选型对保证果园株间除草装置的工作效率十分重要。若液压缸选型不当会有如下问题:
(1)液压缸工作压力不足时,驱动刀轴十分困难,将导致刀具无法避让果树,使伤树率上升;
(2)液压杆行程不满足要求时,驱动刀具旋转角度小于要求角度,易损伤果树,增大装置的伤树率;
(3)液压缸型号过大时,功耗较大,易造成浪费。
综上所述,本文对果园株间除草装置的执行机构进行数学建模,并确定液压缸的活塞杆行程,进行分析与计算并选型,保证装置的工作效率。
2 建立数学模型
根据刀具的运动形式以及运动轨迹要求,将执行机构设计为带摆动油缸的四连杆机构,如图5。
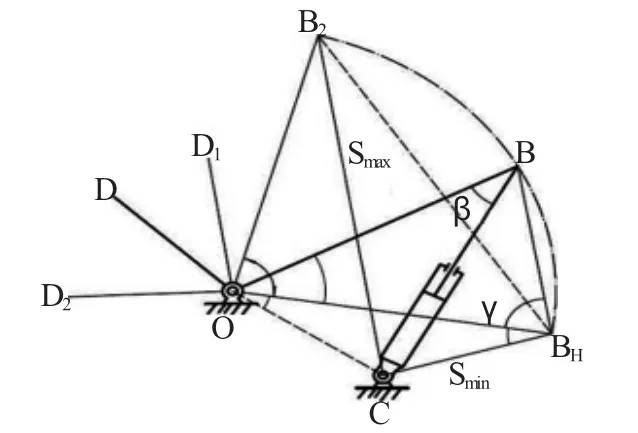
图5 带摆动油缸的四连杆机构
根据执行机构模型和已知杆长和角度参数φk和k=Smax/Smin,形成以l为函数的四连杆机构参数,且l=OBH/Smin。当k=S时四连杆机构点O、BH和C的始末位置可由以下公式确定。

(k2-1)>0,且l只能在0°≤βH≤180°范围内取正值,可得:
(1)当(βH+γk)=180°时:

(2)当βH=0时:

此外还应当考虑当l=lmax时,如果β=βH=0机构将会被卡住,因此规定最小允许角β=βH=10~30°。
3 软件优化求解
3.1 MathCAD求解
由Mathcad软件求解可得到最优结果:lmin中的取值为k=1.3,a=12.6;lmax中的取值为k=1.1,a=80。
3.2 Lingo求解
由Lingo软件求解可得最优结果:lmin中的取值为k=1.3,a=12.6;lmax中的取值为k=1.1,a=80。
以上述求解结果为选型依据,液压缸实际型号标准参照相关研究报道[9],确定液压缸行程为60mm。查阅资料,选用液压缸型号为:UYWE1150×80。
4 试验验证
通过前期理论分析,选取机具作业速度为试验因素,以株间除草装置漏耕率和避让成功率为指标进行试验。试验结果如表1。

表1 试验结果
试验结果表明:果园株间除草装置在作业速度为2~6 km/h,避让成功率为100%,漏耕率为5.19%,各项作业指标均满足国家林果业机械设计要求。
5 结论
(1)设计了一种适合新疆果园株间自动除草的装置,对其工作原理进行了分析,简化了执行机构并建立了数学模型,通过分析执行机构的始末位置,确定了执行机构液压油缸的行程,并对其进行了参数选型。
(2)基于MathCAD与Lingo软件对装置的执行机构进行优化设计,通过对比理论分析与软件求解得出优化结果,论证理论分析、数学建模以及软件求解优化基本正确。确定了果园株间除草装置的执行机构中的液压缸参数,并进行了验证试验,试验结果表明株间除草装置能够满足国家标准设计以及果园作业要求。
猜你喜欢
鞍钢技术(2022年3期)2022-06-12
科技创新与应用(2022年14期)2022-06-02
汽车零部件(2022年5期)2022-05-30
科学与财富(2021年35期)2021-05-10
科技与创新(2018年9期)2018-05-07
科技创新与品牌(2017年9期)2017-10-20
中国高新技术企业(2017年11期)2017-07-08
集装箱化(2016年8期)2016-10-20
中国高新技术企业(2015年17期)2015-05-18
