
基于零件特征单元的零件相似度评价*
2021-08-31 04:50谢京玮谌炎辉
组合机床与自动化加工技术 2021年8期
谢京玮,谌炎辉
(广西科技大学机械与交通工程学院,广西 柳州 545616)
0 引言
在产品设计过程中仅有很少一部分零件是通过完全重新设计而组合到产品中,采用基于案例推理的方法可以帮助设计人员提高产品的设计效率,降低产品整体设计难度,因此需要对零件库中的零件进行相似度分析,使新产品中的零件在设计及制造阶段共享某些设计参数,该方法可以通过零件之间的替换和归并提高零件的重用度、减小亢余的零部件。
近年来零件相似度的研究大体分为三种:基于零件骨架、基于B-rep模型和基于零件特征。朱文博等[1]提出了一种两阶段的基于骨架树的三维模型检索方法,分析零件骨架形状相似度;张祥等[2]提出了一种基于机械零件模型骨架的检索方法,利用骨架树匹配计算零件模型的相似度。徐静等[3]提出一种基于区域分割的零件三维模型检索方法,利用区域结构码对零件的相似性进行研究。罗石林等[4]提出通过对零件类编码、零件装配关系编码、零件规格相似度计算的方式对零件的相似度进行计算。徐春光等[5]运用可拓基元的方式表达零件模型,采用相似度评价方法,得到结构较为相似的若干零件,运用可拓综合关联方法进行零件的匹配。晁永生等[6]分别从零件主、辅特征形状相似度;零件间的几何尺寸相似度;零件间从材料相似度三个方面计算了零件间的相似度。
基于零件骨架和基于B-rep的零件相似度研究方法都以零件整体为研究对象分析零件之间的相似程度,但是在对零件中部分特征单元模块的相似度分析的能力较弱,难以帮助设计者设计或归并仅仅在零件某个区域的不同的零件。本文使用特征结合体素构造的方法对零件的相似度进行研究,提取各个特征在结构方面的精确位置及几何信息,并通过逐一对比特征在拓扑、位置、几何三方面的信息,得到零件各个特征的相似性,再通过计算得到零件的整体相似性。相较于之前的方法,该方法不仅可以定量的分析不同零件整体的相似度,还可以对不同零件的不同区域进行相似度分析,相较于先前的方法更为灵活、准确。
1 零件模型的建立
建立零件信息模型表达式Part(X)={A,B,C,D,E},A表示零件X所包含特征单元的数量,B表示零件X特征单元之间关系的总量,C表示零件X中特征之间的拓扑关系,D表示零件X各个特征单元的位置参数,E表示零件X中各个特征单元的几何参数。
1.1 零件特征拓扑信息建模
零件特征拓扑信息是指特征与特征在空间位置上的关系,特征间的关系分为邻接关系、包含关系、参数关系和位置关系。①邻接关系是指两个特征在空间上拼接在一起,且两特征之间不存在任何重叠及包含;②包含关系指某一特征位于另一特征内部,其中被包含特征的体积会占用包含特征的体积;③参数关系是指两特征之间其中一个特征参数改变,另一个特征参数也需随之改变;④位置关系是指多个特征之间存在的位置或角度关系,任意一个特征可以通过线性尺寸、偏差、尺寸向量、角度尺寸、偏差、旋向及观察方向表示其余的特征。
通过矩阵来表示零件中两两特征间的关系,特征单元之间的邻接关系、包含关系、参数关系、位置关系分别用数字0.2、0.4、0.6、0.8来表示,两特征不存在任何关系用数字0表示,同一特征用1表示。如图1示例零件所示,该零件有8个特征单元,拓扑结构关系矩阵表示如表1示例零件拓扑结构关系矩阵所示。
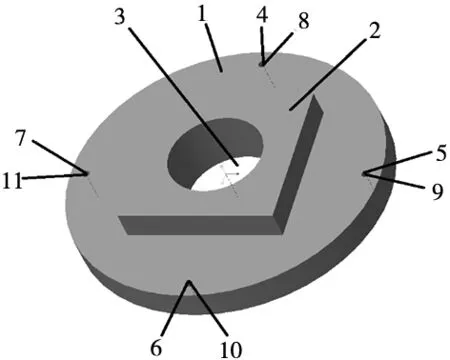
图1 示例零件
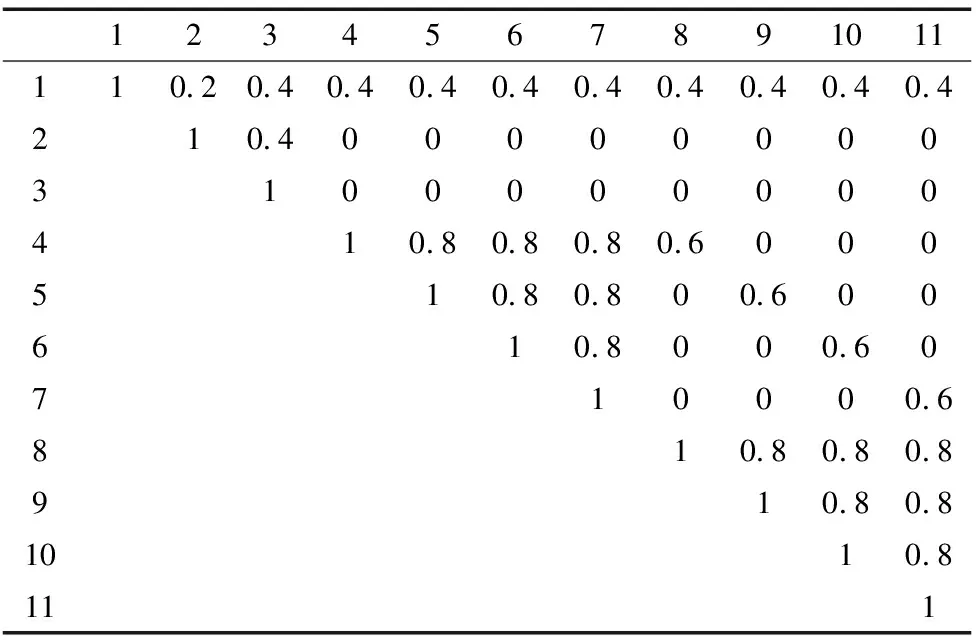
表1 示例零件拓扑结构关系矩阵
1.2 零件主特征位置信息建模
研究零件内各个特征的位置信息,需要建立笛卡尔坐标系表达特征单元在三维空间内的位置坐标。对于一系列需要对比相似性的零件,需要选取一个相同且合适的坐标系原点。特征单元分为主特征和辅助特征,主特征形成零件的主体形状骨架,是辅特征的载体;辅特征形成零件的次要几何形状,是对主特征的局部修饰和补充[7]。设每个主特征由二维几何图形通过扫描一条穿过该二维图形的扫描线段拉伸而构成的三维体积,扫描线段或由一个或多个直线段构成,或由处于不同平面的弧线段构成,或由直线段和弧线段组合构成。扫描段可以是封闭的也可以是不封闭的,若该线段为一条直线段则该扫描称为平移扫描,若该线段为一个圆或一段弧则该扫描称为旋转扫描。扫描线段的位置即代表该特征的位置信息。
Di(X)={Str,Arc}代表第i个特征在三维坐标系中的扫描线段,Di(X)中包含两类参数,即直线段(Str)参数:起始点三维坐标(xs,ys,zs)和终止点三维坐标(xe,ye,ze);弧线段(Arc)参数:圆弧所在平面的法向量(u,v,w)、弧心点的三维坐标(xa,ya,za)、起始点三维坐标(xs,ys,zs)、终止点三维坐标(xe,ye,ze)和半径r。图2表示三维坐标系中的扫描线段AB,该线段为直线段,则Di(X)中的参数为起始点三维坐标(5,6,7)和终止点三维坐标(13,12,11)。
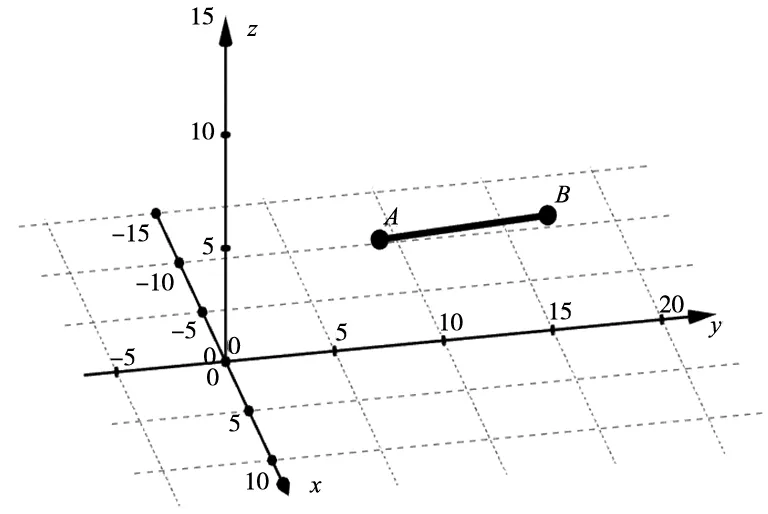
图2 零件特征位置信息
1.3 零件主特征几何信息建模
采用基于扫描构造基面的体素表示方法来表达特征的几何信息,只要清楚线段在三维坐标系中的位置与扫描线段起点和终点的二维图形在三维坐标系中的信息就可以采用扫描法来表示特征单元。特征单元分为正特征单元和负特征单元,正特征单元之间不存在体积的重叠,负特征单元不可以单独出现或与其它负特征单元搭配出现,零件总体积等于正特征单元体积之和减去负特征单元体积之和。
Ei(X)={Sta,End,Sym}代表零件X第i个特征单元的几何信息,Sta表示扫面线段起点的二维图形,End表示扫面线段终点的二维图形,Sym采用±符号来表示该特征单元为正特征或负特征。
图3表示扫描线段起点的二维图形和扫面线段终点的二维图形,图3a是圆心为(5,6,7)半径为3的圆,图3b为点(13,12,11)。扫描线段AB与二维图形Sta、End共同构成圆锥体正特征,如图3所示。

(a)扫描线段起终点二维图形
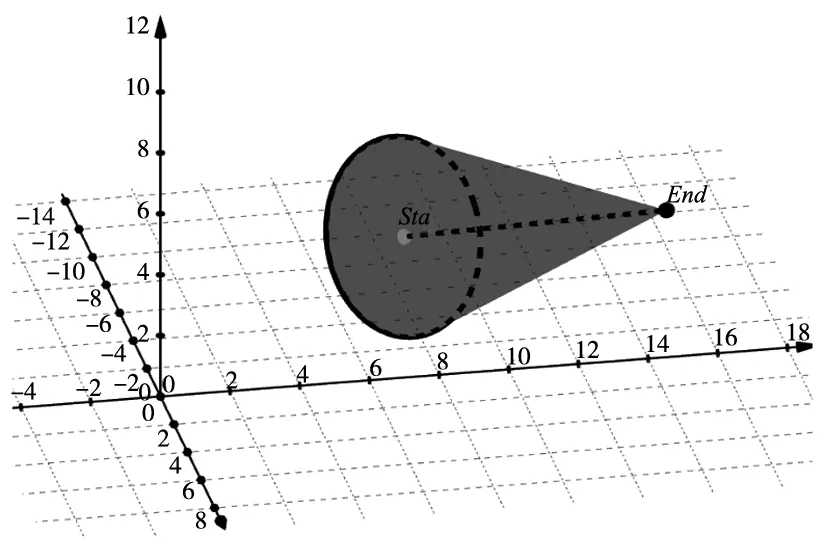
(b)圆锥体正特征图3 零件主特征几何信息
2 零件相似性评价方法
评价零件相似度,应先检索零件库中的所有零件,分拣出在功能、结构上大体相似的一类零件,然后使用相同的零件建模方法对这一类零件进行构建,最后构建数学评价模型依次比较每个特征在位置上、几何上和拓扑关系上的相同或不同程度。
2.1 相似零件检索
在产品族零件库中通过比较各个零件的特征总数和特征关系总数提高检索效率,淘汰差异大的一类零件。设第i个零件特征单元的总数为xi,特征间关系总数为yi。以零件特征单元总数和零件特征间关系总数构成多个二维数据点,采用欧式距离来判断每个零件数据点之间的距离,零件i,j的欧式距离计算公式如下,最后依此将距离最近的点聚合到一个集群并合并包含相同点的集群形成树状图。
(1)
2.2 零件特征拓扑关系相似度
零件特征拓扑关系相似度是指一个零件中特征的关系网络与需要进行比较零件中特征的关系网络的相似度。特征关系网络使用矩阵来表示,则只需要比较两个矩阵中各个元素的相似度即可得到两零件的特征拓扑关系相似度。设零件A、B的特征关系矩阵为m×m的对角矩阵与n×n的对角矩阵,若n>m,则在A矩阵的最后一行和列补充n-m行、列的矩阵,补充的行、列除对角线处的元素为1其余元素均取0,零件特征拓扑关系相似度计算公式如下:
(2)
其中,m,n表示零件A、B的总的特征单元数量,aij为代表零件A拓扑关系矩阵中第i行第j列的元素,bij为代表零件B拓扑关系矩阵中第i行第j列的元素。
2.3 零件特征位置相似度
不同零件的位置相似性的比较实质上是扫描线段在三维坐标系中位置的比较,扫描线段的类型有直线段、弧线段,任何线段都可以由这两种线段拼接而成。因此需要比较这两种线段中的各项数据的相似性即可得到两特征之间的相似性。
特征的位置信息分为两大类数据一共包含19个参数其中包括:直线段参数,起始点三维坐标(xs,ys,zs)和终止点三维坐标(xe,ye,ze);弧线段参数,圆弧所在平面的法向量(u,v,w)、弧心点的三维坐标(xa,ya,za)、起始点三维坐标(xs,ys,zs)、终止点三维坐标(xe,ye,ze)和半径r,若扫描线段为直线段则第7~19个参数取0。零件的位置相似度数学表达式如下:
(3)
2.4 零件特征几何相似度
已知由体素构造法得到的特征单元是由二维图形通过扫描线段而得到的,所以通过比较两个不同特征单元扫描线段起点和终点的二维图形即可得到这两个特征单元的几何相似度。以每条边的边长为参数,边为直线则比较直线段的长度,若边为弧线则比较弧线段所在圆的半径和弧度。圆是弧度为2π的弧线构成的扇形,只需要其半径数据即可。零件A、B中的第i个特征单元的几何相似度计算公式如下:
(4)
其中,Aik代表零件A第i个特征中的第k个参数;l表示零件A、B第i个特征中包含最多的参数个数,不存在的参数用数字0补全。零件A、B的几何相似度计算公式如下:
(5)
2.5 零件综合相似度
零件特征拓扑关系相似度、零件特征位置相似度和零件特征几何相似度三种数据对零件综合相似度的影响是不同的,所以采用加权数来表达三种参数对零件综合相似度影响的大小,参数加权数越大表面该参数对零件综合相似度的影响程度也越大。零件的综合相似度数学表达式如下:
S=ωpSp+ωgSg+ωtSt
(6)
其中,ωp为零件特征拓扑相似度的权重系数;ωg为零件特征位置相似度的权重系数;ωt为零件特征几何相似度的权重系数,其中ωp+ωg+ωt=1。最后选取一定的相似度阈值考察两零件的综合相似度。
3 实例分析
如图4所示法兰实例,图4a为平面突面整体法兰,图4 b为突面带颈螺纹钢制管法兰。
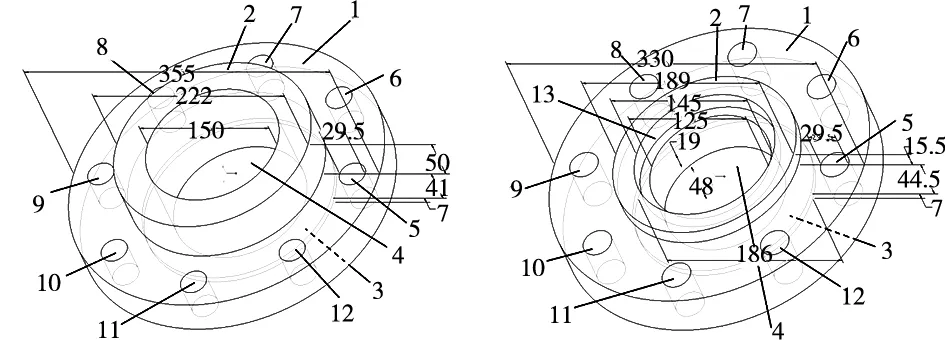
(a)平面突面整体法兰 (b)突面带颈螺纹钢制管法兰图4 法兰实例三维模型
3.1 零件特征模型的建立
两零件的特征1均为半径最大圆面的拉伸,但两圆面的半径不同;特征2为特征1上表面邻接的圆面拉伸;特征3为特征1下表面邻接的圆面拉伸;特征4为贯穿特征1、2、3的圆面拉伸负特征;5~12为特征1所包含的孔特征;突面带颈螺纹钢制管法兰中的特征13为特征4所邻接的圆面拉伸负特征。表2、表3分别是图4a零件和图4b零件的特征拓扑关系矩阵。
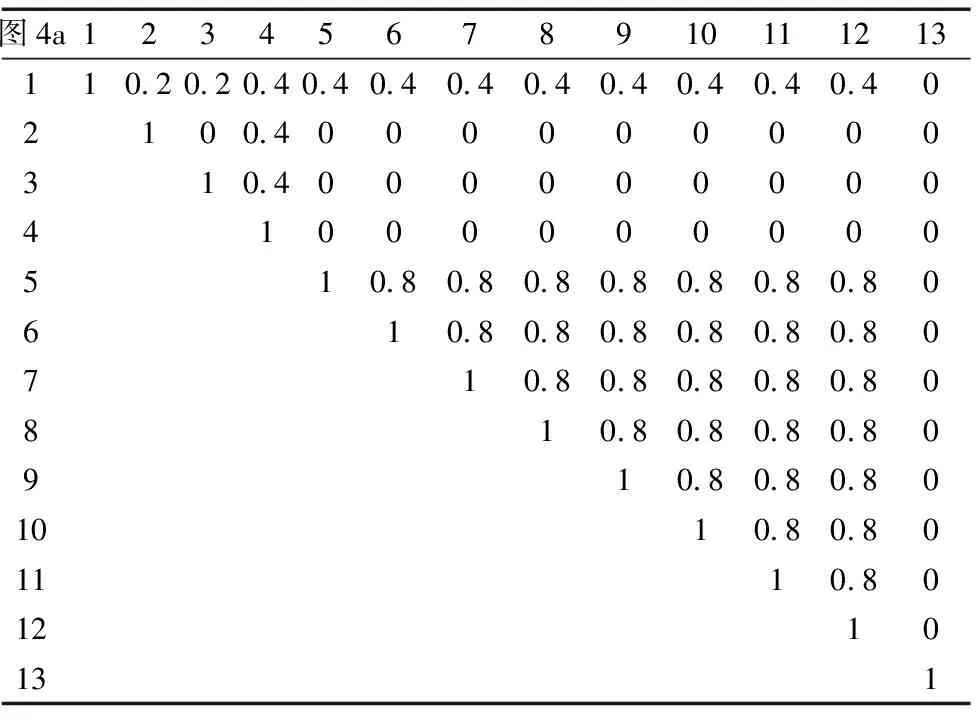
表2 平面突面整体法兰拓扑结构关系矩阵
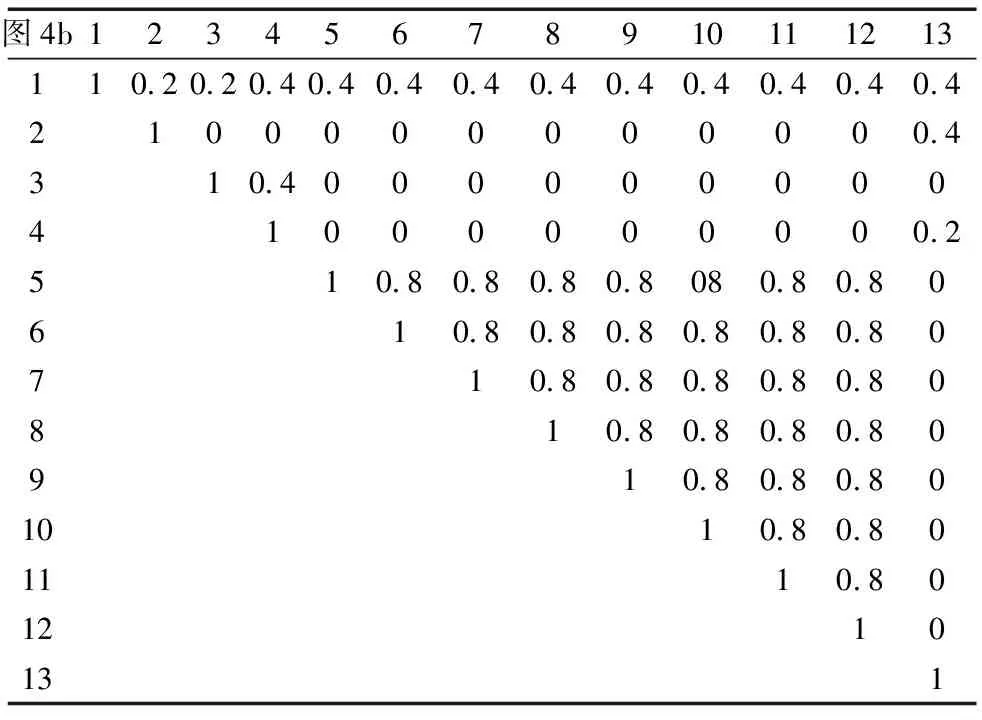
表3 突面带颈螺纹钢制管法兰拓扑结构关系矩阵
3.2 零件相似性计算
根据零件特征拓扑关系矩阵,由式(2)可得零件A、B的拓扑关系相似度为:St(AB)=0.985 6。根据零件特征在零件中的位置得到特征扫描线段的位置坐标,依据式(3)得到零件特征位置相似度为:Sp(AB)=0.892 7。通过对比扫描线段起点与终点的二维图形依据式(4)、式(5)计算得到零件特征的几何相似度为:Sg(AB)=0.950 1。最后由式(6)可得到零件的综合相似度为:
S(AB)=0.2·St(AB)+0.4·Sp(AB)+0.4·Sg(AB)=0.934 2 选取的阈值为0.900,零件A、B零件的相似度为0.934 2大于阈值,则零件A、B有较高的相似度,在设计、制造和使用阶段可以相互作为参考。
4 结论
本文采用体素构造法构造了基于零件特征的数字化信息模型,使用每个特征单元的拓扑信息、位置信息和几何信息表达零件的结构信息,若需要检索的零件较多,则通过各个零件特征单元的个数和特征单元间的关系数采用欧式距离聚类方法检索出大致相似的零件集合,再在该集合中进行具体零件的相似性研究,这样可以大大缩短零件的检索时间;然后,通过计算得到零件在拓扑、位置和几何三方面的相似程度;最后,通过加权计算得到零件的综合相似度,通过选取一定的阈值设置相似零件在设计、制造和使用阶段的参考范围。
该方法计算量小,检索速度快,在零件整体和局部都可以灵活地应用该方法计算其相似度,而且可以通过结合模块化设计的思想对零件特征单元模块进行相似度比较。帮助设计者在设计和制造阶段更快的检索借鉴模型,并通过个人需求修改或替换零件特征单元,更便捷的设计或制造各种零件,缩短产品的研制周期,使零件在设计及制造阶段共享某些设计参数,减少亢余零件提高零件的重用度。今后的研究会面向结构更为复杂、更多特征、特征间关系更为复杂、制造周期更长的一类零件。
猜你喜欢
贵州大学学报(自然科学版)(2021年4期)2021-09-12
小学生学习指导(高年级)(2021年5期)2021-05-18
汽车维修与保养(2021年12期)2021-03-08
汽车维修与保养(2020年10期)2021-01-22
小学生学习指导(低年级)(2019年3期)2019-04-22
小学生学习指导(低年级)(2019年4期)2019-04-22
小学生学习指导(低年级)(2018年12期)2018-12-29
科技创新与应用(2018年36期)2018-01-29
数字技术与应用(2016年6期)2016-07-09
现代制造技术与装备(2015年4期)2015-12-23
