倾斜摄影与精细建模技术在城市三维建模中的实践与精度分析
2021-08-31 03:29许中胜
科技经济导刊 2021年22期
许中胜
(安徽省第二测绘院,安徽 合肥 230031)
2017年7月淮北市获批为国家“智慧城市时空大数据与云平台建设”试点城市。城市三维建模项目是智慧城市建设的子项目。淮北市城市三维建模项目,需新增建城区40平方千米城市三维实景模型,其中有20平方千米为普通建模,另外20平方千米为精细建模。
1.基于倾斜摄影实景城市三维建模的主要技术要点
1.1 现场踏勘
对测区地形地貌、人员密集区域、建筑物高度等进行现场查看,标注并记录。经过现场踏勘,将测区分为A、B、C、D四个大区域。其中A区划分为13个小区域,B区划分为12个小区域,C区划分为12个小区域,D区划分为12个小区域。这里仅介绍B区踏勘情况:
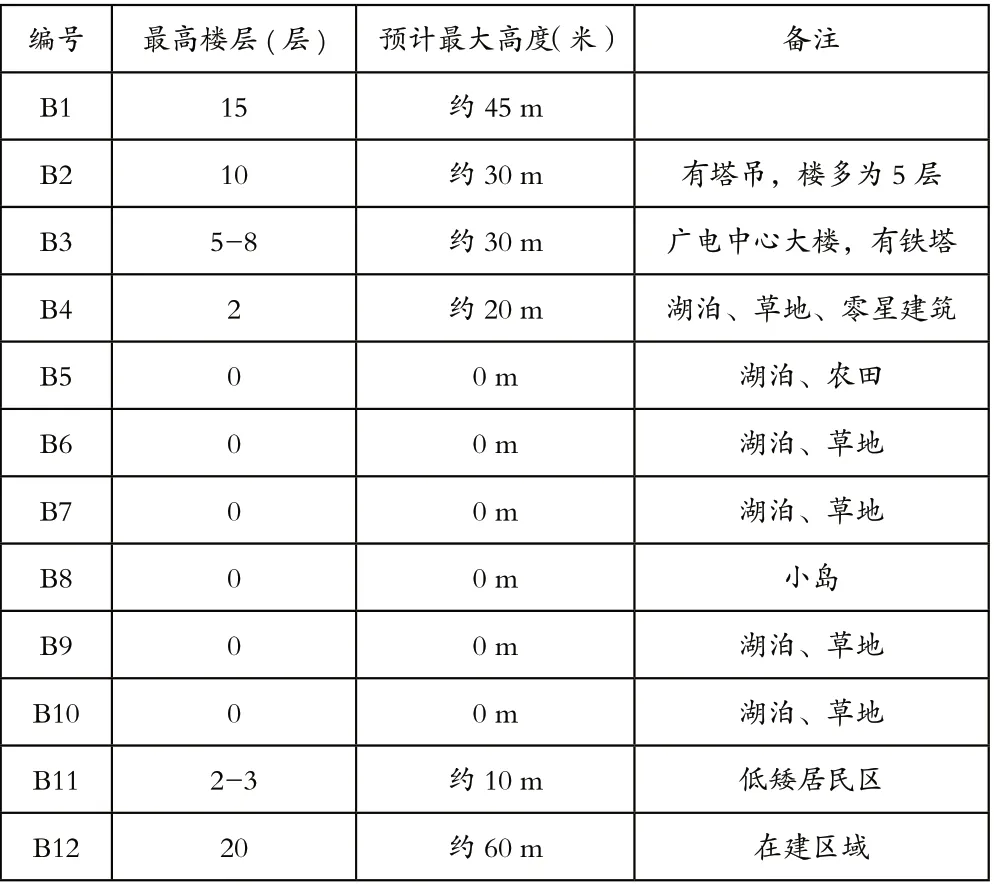
表1 B区踏勘记录表
1.2 航线规划、像控预布设
经过前期现场踏勘,项目组决定采用划分多个区块的方式进行航线规划,使得飞机在飞手的可控视线范围之内,降低飞行风险和工作量。
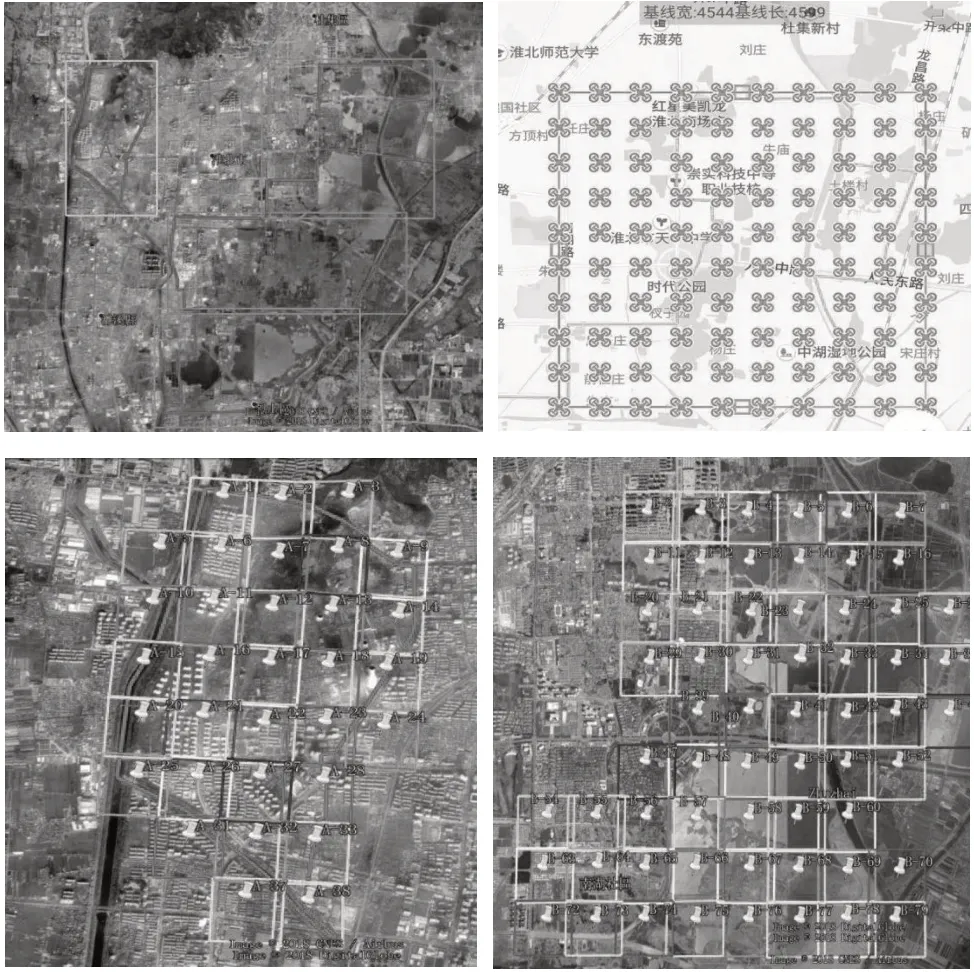
图1 任务拆分航线规划设计图
1.3 空三加密
空三加密是整个数据生产的关键。航片的重叠率、清晰度和旋偏角等因素都会影响空三加密的运算结果。每次空三加密完成后需要查看算出的加密点是否有漂移;如有漂移,判断漂移的区域是边缘还是中心;整个空三加密点的相对位置是否正确等。如果空三加密点相对位置不正确或者漂移,并且漂移的区域是中心地段或者是重要区域,就必须重新进行计算。多次计算都未成功,可以删除一些质量和姿态较差的航片再次尝试。
多架次的不同高度的航片融合,计算可能会失败,或者是计算出的加密点漂移。该状况下,需先创建多个块。将不同航高的航片导入至不同的块,分别进行空三加密计算。该步骤计算完成后,记录解算出来的航片位置与姿态信息。再新建一个块,加载所有的航片。输入之前分开算好的航片位置与姿态信息,融合起来进行空三加密计算。此方法可解决不同架次、不同航高航线空三加密问题。
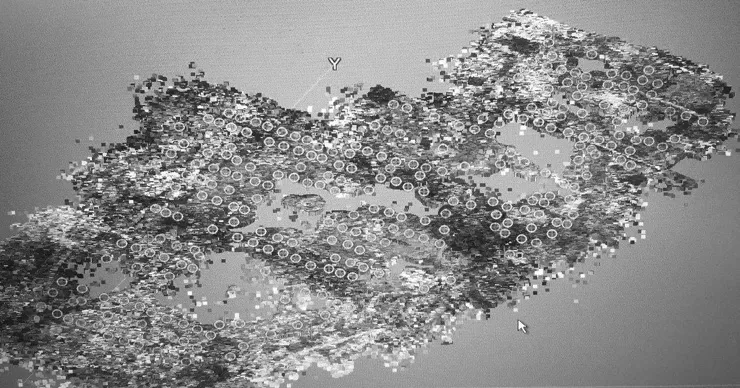
图2 空三成果展示图
本项目内业数据处理过程中调用10台服务器,将任务由大化小,分块进行计算,最终结算点云结果如图上所示,模型控制点精度如下图所示:

图3 空三像控精度
由精度报告中得出相片所刺控制点精度都控制在厘米级。
1.4 三维重建
空三加密、控制点刺完之后就开始模型建立贴图。软件通过空三加密点计算出不同规则三角网TIN,并且生成白模的三维模型。再通过三维模型形状位置从航片里面选取最合适的进行纹理的贴合,最后输出纹理逼真的实景三维模型。把模型切分为多块来建立模型,这样可以把系统计算不好的或者是计算机自动不好处理的如水域等单独提出来进行第三方软件构网贴图。

图4 实景三维模型成果展示
1.5 精细拼接合并
整个模型数据最终需要合并成一个整体,将合并之后的空三点云数据在同一空间框架之下进行切片分割。所有分割模型需统一使用同一坐标原点,且使用同一个切片框架。保证无重复的瓦块命名。

图5 区块合并,统一切片片面示意
1.6 精细建模
对划定的20平方公里范围的建筑物和构筑物,进行模型测高、外业纹理拍摄、纹理处理,利用实景三维模型基础图,基于3DMAX软件生产制作,形成精细三维模型数据。

图6 精细建模流程图
根据DOM影像数据、倾斜摄影三维模型数据,获取模型的轮廓底图及尺寸数据。建模之前,需要在外业,运用地面数码相机拍摄的照片为贴图,制作建筑物立面纹理。
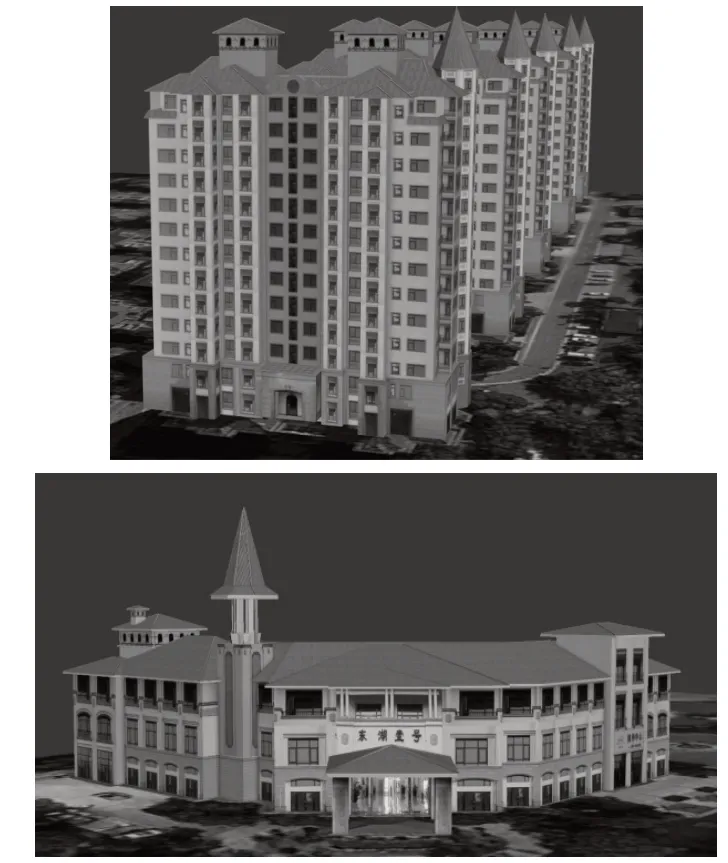
图7 精细模型单体展示
1.7 模型整合、平台可视化
对实景三维模型进行裁切,以瓦块整合至同一空间框架之下,生成osgb格式的模型数据,加载至椭球平台。导入水面模型,将高程调整至与实景三维模型高程相匹配。对实景三维模型当中结构不完整的楼体结构进行压平面操作。在此基础上叠加融合相对应的精细建筑物模型,进一步导入到平台,进行可视化操作。

图8 平台可视化展示
2.质量检查
2.1 航空影像图件资料检查
以飞行区域为单位,检查各区航空影像数量、重叠率、色彩饱和度、像移等质量。影像应清晰,层次丰富,反差适中,色调柔和;能辨认出与地面分辨率相适应的细小地物影像,能够建立清晰的立体模型。因飞机航速的影响,在曝光瞬间造成的像点位移不应大于1个像素,最大不应大于1.5个像素。拼接影像应无明显模糊、重影和错位现象。融合形成的高分辨率彩色影像不应出现明显色彩偏移、重影、模糊等现象,检查结果以下表所示。
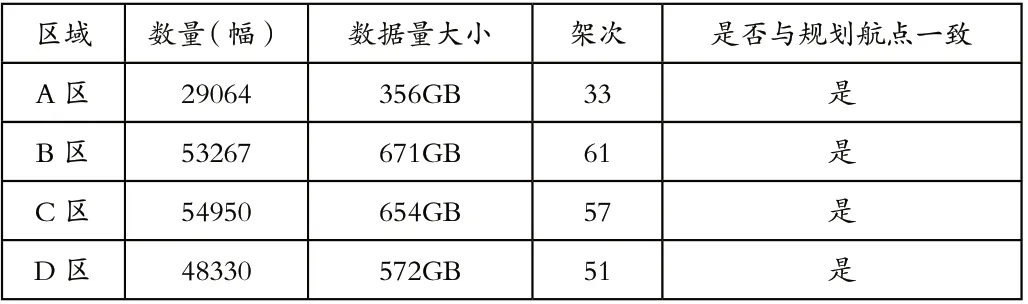
表1 影像数量检查

表2 影像重叠率检查表

表3 影像色彩饱和度检查

表4 影像曝光度检查表

表5 影像像移检查表
2.2 模型位置误差检查
采集模型点位数据与实地外业测量数据对比分析,分别求得点位平面中误差和高程中误差。根据《1:500地形图航空摄影测量内业规范》GB/T7930-2008关于像控点最大中误差的规范指标得出结论,此模型成果满足要求。

表6 样本模型精度检查主要质量元素

表7 模型精度检查主要质量元素3
3.结语
从本项目结合工程实际,采用倾斜摄影实景三维建模技术、精细建模等手段,有效提高城市三维建模数据加工生产的效率。在项目实施过程中,针对难点问题做好技术保障,做好各工序质量检查,确保产品质量。由此获得的淮北市城市三维模型美观逼真,精度良好。该项目实践和质检分析结果,能为类似作业提供有益参考。
猜你喜欢
导航定位学报(2022年5期)2022-10-13
一重技术(2021年5期)2022-01-18
国画家(2021年4期)2021-10-13
现代企业(2021年2期)2021-07-20
华人时刊(2021年23期)2021-03-08
电脑爱好者(2020年6期)2020-05-26
军民两用技术与产品(2019年12期)2020-01-19
课堂内外(小学版)(2017年5期)2017-06-07
汽车之友(2016年15期)2016-08-23
华人时刊(2016年16期)2016-04-05