基于圆弧合成孔径体制的跑道异物监测雷达成像研究
2021-08-30 02:26:52章林龙超童建文
航空工程进展 2021年4期
章林,龙超,童建文
(1.空中交通管理系统与技术国家重点实验室,南京210007)
(2.中国电子科技集团公司 第28研究所,南京210007)
0 引 言
跑道异物(Foreign Object Debris,简称FOD)是对影响机场航班起降的外来物质的总称,跑道异物监测目前靠人工实现,无法24小时进行监测,可靠性不高,影响机场航班秩序,造成大量的经济损失和时间损失。因此FOD监测设备的发展趋势是一种能够自动探测、定位和上报FOD信息的机场常设设施。
由于毫米波雷达对雨、雪、雾等气候条件和强光、夜晚等光照条件适应性好,且具备足够的探测和定位精度,因此是FOD监测系统不可或缺的技术手段。美国、英国、以色列、新加坡等国家近年来开展了跑道FOD监测系统的研发,英国的Tarsier技术成熟,检测率低,扫描速度慢,有盲区;以色列的FODetect系统检测性能较好,设备部署、维护成本高;新加坡iFerret设备安装、维护成本较低,易受天气影响;美国FOD Finder系统部署使用方便,但不能连续工作;此外,加拿大的Pavemetrics公司最近研制出了一套LFOD(Laser Foreign Object Debris)移动式探测系统,德国的费劳恩霍夫技术研究院研制的基于220 GHz FMCW毫米波逆合于成孔径雷达技术的COR‐BA-220系统,日本东京电子导航技术研究所ENRI以及法国尼斯大学的天线实验室LETA研制的采用类光学透镜天线的FMCW毫米波雷达等,但距离产品成熟度还有一定距离。国内,近5年来在FOD探测雷达技术方面取得了较大的进展。中国电子科技集团公司第50研究所研制了类似Traiser系统的塔台式FOD监测系统,由毫米波雷达和光电设备组成;成都赛英公司研制了基于FMCW体制的W波段毫米波FOD探测雷达,最大作用距离达到350 m;中国航空工业集团公司第607研究所研制了类似FODFinder的车载式FOD监测系统;中国电子科技集团公司第29研究所联合中国民航局第2研究所研制了边灯式的FOD监测设备。
国内,程一帆采用图像的方法分离背景与前景实现FOD异物检测;成威对雷达采集图像进行FOD异物检测;李海翔提出了基于图像处理方法的FOD检测系统的软硬件构架。国内一些研究所和公司近几年也研发了几款FOD设备,一些高校开展了FOD技术研究,但目前均处于研究阶段,尚未正式在民用或军用机场正式投入使用。
本文采用一种全新的雷达体制——圆弧合成孔径雷达(ArcSAR),通过体制上的创新来解决实孔径扫描体制存在的原理性问题,通过比较实孔径扫描和圆弧合成孔径雷达的优缺点开展信号模型仿真,并与实测数据进行对比验证。
1 ArcSAR雷达体制及成像原理
ArcSAR利用长转臂旋转,使得转臂顶端的低增益天线运动形成圆弧轨迹,然后通过沿圆弧轨迹利用合成孔径原理,在数字域综合出高分辨率成像波束。ArcSAR由基座、转臂和天线支架等组成,如图1所示。

图1 ArcSAR体制FOD监测雷达组成Fig.1 ArcSAR FOD monitoring radar composition
ArcSAR成像几何模型如图2所示,假设远处存在目标点P
,雷达天线的相位中心为S
,雷达至目标P
的俯视角为β
,天线转台相对目标高度H
,天线转动的角速度为ω
,转臂长度为L
,转臂旋转轴中心到目标的距离为r
,起始时刻为τ
,R
(τ
)为雷达与目标P的瞬时斜距,τ
为慢时间,t
为快时间。其中目标斜距R
(τ
)可表示为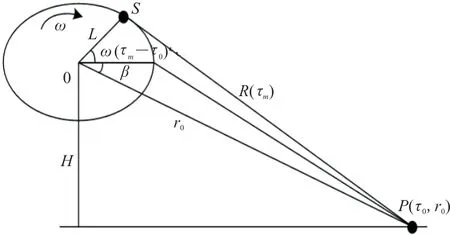
图2 成像几何原理图Fig.2 Imaging geometry schematic diagram

r
,通过泰勒展开得到目标斜距的近似表达式为
2 ArcSAR信号模型
ArcSAR以线性调频连续波(FMCW)信号体制为例,雷达发射调频连续波信号s
(t
)为
P
的雷达回波信号为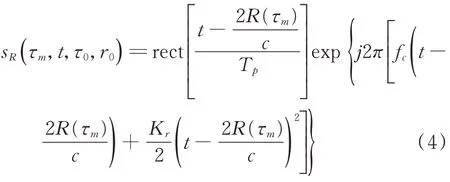
β
=H r
,因此: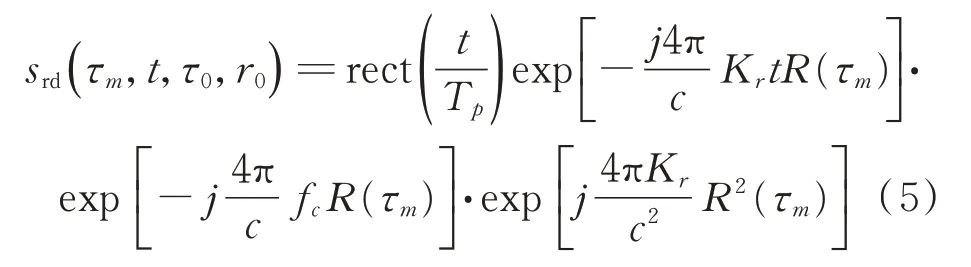
K
为调频斜率;T
为脉冲调制周期;f
为载波频率;R
(τ
)为目标真实距离;c
为光速。
ω
-k
等成像算法生成二维雷达图像,其中BP算法没有成像几何的近似,更适合SAR高分辨率精细成像应用,因此本文以BP成像算法为例进行分析。对式(5)进行快时间t
的傅里叶变换得到目标回波频谱:
f
=2r K c
,得到目标回波一维距离像:
θ
,r
)的雷达复散射图像I
(θ
,r
)为积累角范围内各方位一维距离像对应距离值进行相位补偿后并相干积累的结果:
θ
=ω
(τ
-τ
)为图像像素(θ
,r
)对应的方位角;τ
和τ
分别为积累角确定的像素点(θ
,r
)的雷达照射起止时刻。采用式(8)可以获得二维极坐标形式的雷达图像,因此通过对雷达图像序列进行目标检测,获得FOD检测结果。
3 ArcSAR信号仿真分析
按照我国民航的最高测试要求,采用直径1 cm和高1 cm的金属圆柱体,探测距离为75 m,则其雷达横截面(RCS)为-40 d Bsm或1 cm(实际圆柱体RCS大于此值),其参数如表1所示。
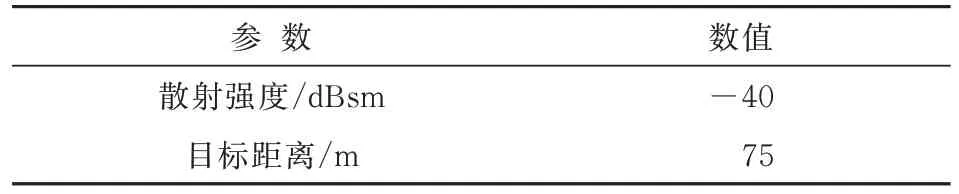
表1 仿真目标参数Table 1 Simulation target parameters
雷达仿真参数如表2所示,信号体制为FM‐CW,通过信号模型构建雷达信号回波进行仿真验证。

表2 圆弧合成孔径FOD监测雷达参数Table 2 Parameters of ArcSAR FOD monitoring radar
根据雷达方程进行计算,整机系统设计指标如表3所示。

表3 整机系统设计指标Table 3 Design index of whole machine system
圆弧合成孔径FOD设计指标与实孔径的比较如表4所示。
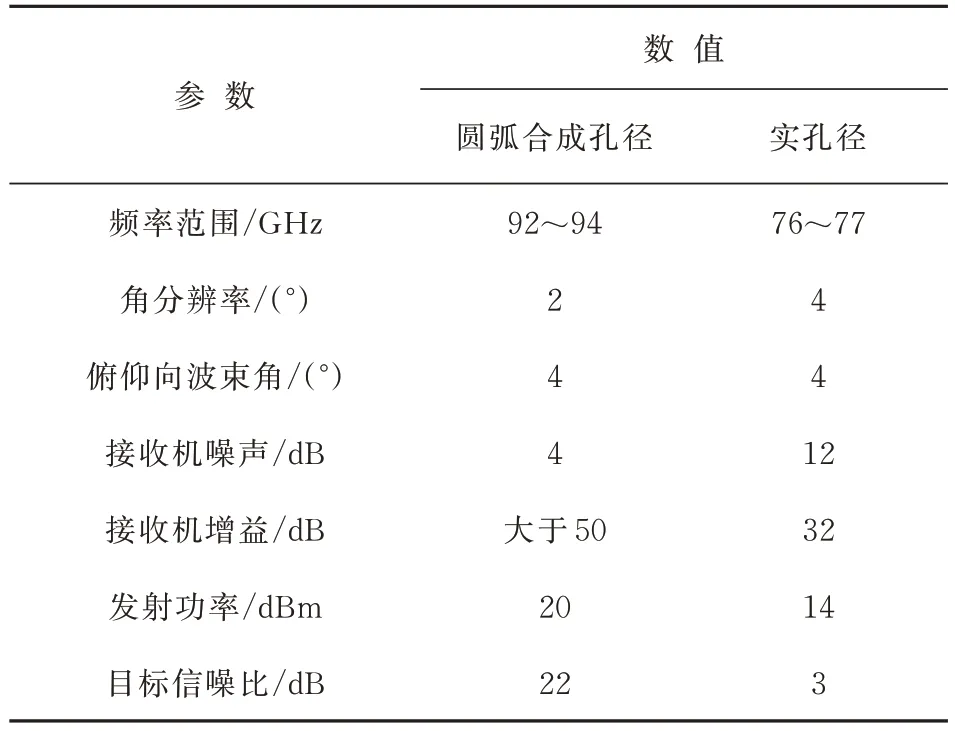
表4 圆弧合成孔径FOD与实孔径设备指标比较Table 4 Comparison of parameters between ArcSAR FOD and real aperture equipment
综上,采用圆弧合成孔径技术,比实孔径的接收性能及国内相似方案有显著的性能提升,对同样目标的探测距离将提高2~3倍。
ArcSAR成像结果如图3所示。为了说明ArcSAR体制对“闪烁”杂波的抑制作用,对大雨情况下的实孔径与ArcSAR成像结果进行仿真分析。
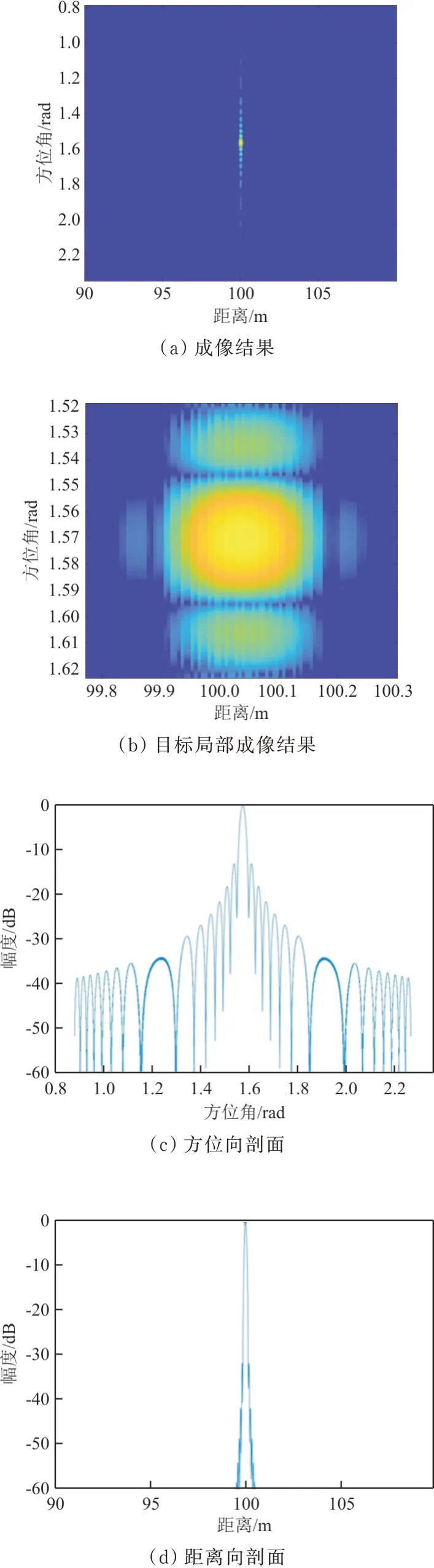
图3 圆弧合成孔径(ArcSAR)FOD监测雷达仿真成像结果Fig.3 Simulation imaging results of ArcSAR FOD
假定雨滴在跑道上形成的水花雷达散射截面积为均值-30 d Bm和标准差-305 d Bm的正态分布,水花出现频率为20个/秒/平方米,持续使时间为200 ms,目标雷达横截面积为-20 d Bm,仍然采用上述仿真参数,仿真结果如图4所示(图像归一化,且最小幅度限制到-10 d B),可以看出:实孔径体制无法抑制水花这类“闪烁”杂波,图像中形成密集的杂散,严重影响了多目标的检测和判决;ArcSAR体制通过时间上的平均,可以有效抑制此类“闪烁”噪声,背景更为干净。
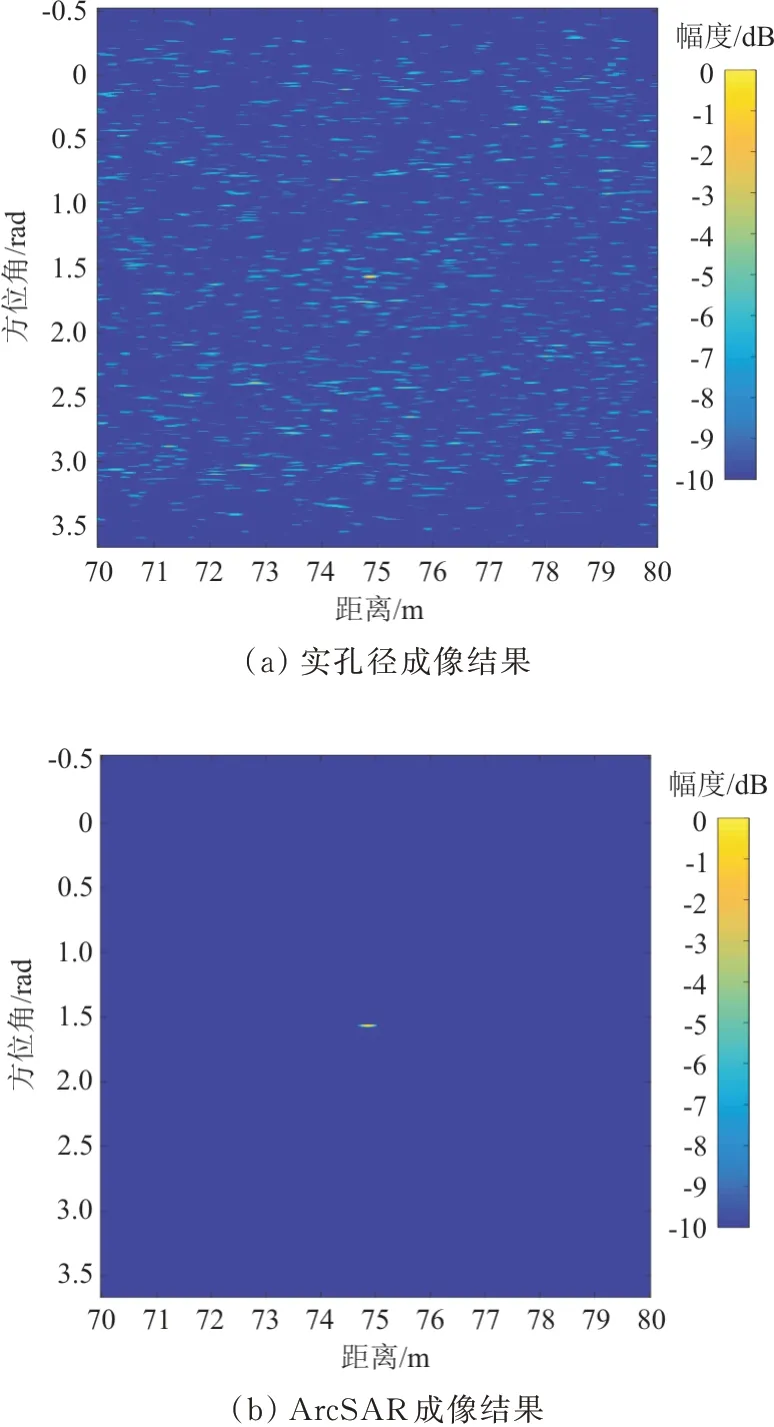
图4 实孔径与ArcSAR成像体制对“闪烁”杂波抑制能力的仿真比较Fig.4 Simulation comparison of“flicker”clutter suppres‐sion ability between real aperture and ArcSAR
4 ArcSAR实测数据验证
为了对技术原理进行验证,同时对部分关键技术进行预先突破,构建的原理验证平台如图5所示,考虑到降低实现难度,原理验证平台采用92 GHz频段,并将转臂长度增加到1 m。

图5 ArcSAR FOD监测雷达原理验证平台外场试验照片Fig.5 Photos of field test of principle verification platform
在长沙浏阳河鸭子铺段进行大范围成像试验,最远探测距离超过1 km,结果如图6所示。

图6 扫描扇区的二维高分辨直角坐标雷达图像(白色方框为标定三面角)Fig.6 Two dimensional high resolution Cartesian coordinate radar image with scanning sector
标定的三面角成像结果如图7所示。

图7 标定三面角成像结果及距离/方面剖面Fig.7 Imaging results and range/aspect profile

由于雷达发射信号带宽为200 MHz,因此其理论的加窗距离分辨率为0.97 m;由于转臂长1 m且天线波束角为50°,因此其理论的方位向角分辨率为0.11°。根据标定三面角的图像分析可知,实际的距离向分辨率为0.98 m,方位向角分辨率为0.15°,与理论值基本吻合,证明了ArcSAR系统及成像算法的有效性。
为了进一步论证本文方法有效性,在开慧通用机场采用ArcSAR系统对FOD进行成像试验。试验包括两个部分:在保证雷达位置不动的情况下,首先不在场景中放入任何FOD目标进行成像,如图8(a)所示;然后将多个FOD目标(如4 cm螺柱、2 cm钢珠等)沿雷达径向放入场景进行成像,如图8(b)所示,目标清晰可见,因此ArcSAR系统能够实现对FOD目标有效探测。在大兴机场的试验中,采用半窗杂波跟踪算法,提高复杂背景形式下目标判断和跟踪,实现了对直径厘米级(最小粒径1 cm)异物的稳健检测(以色列2.5 cm);探测时间60 s(以色列120 s),具备更加及时的异物发现报告能力。
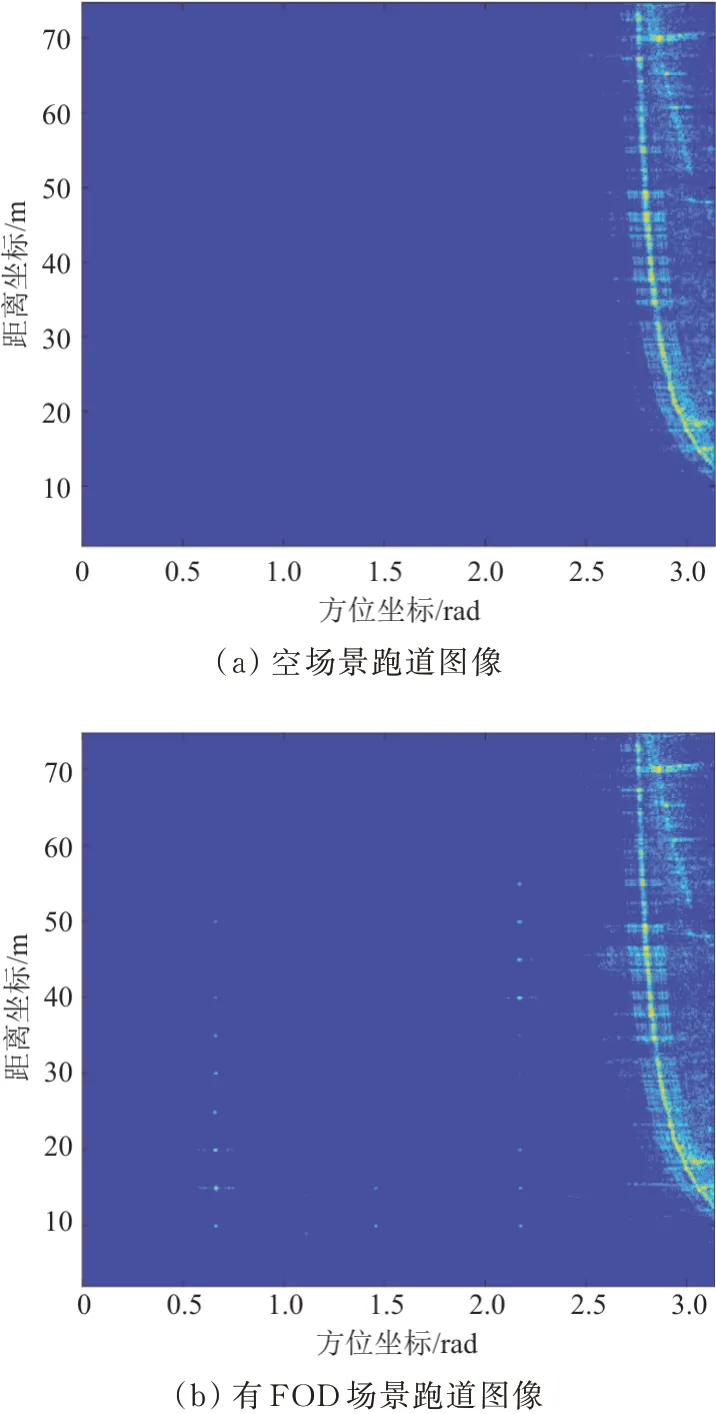
图8 开慧通用机场ArcSAR系统成像Fig.8 ArcSAR imaging system of Kaihui general airport
ArcSAR体制实际上是通过多帧低增益天线回波形成的时间序列图像的相参积累而获得目标图像,在时间上有平均和积累的效果,因此具备以下独特优点:
(1)实孔径对目标的照射时间为毫秒级,对于雨滴/雪粒、跑道上移动的树叶/草团、偶尔停留的鸟、雨滴在跑道上溅起的水花等“闪烁”杂波,在扫描期间无法与静止图像区别开,因此对此类“闪烁”杂波抑制能力弱,时间上突发的杂波会在整个扫描周期内停留于图像中。如果需要进行杂波抑制,必须通过多帧扫描图像进行平均抑制,但又增加了处理时间,无法满足FOD监测对实时性的要求。本文对环境适应性将显著优于常规实孔径扫描体制。
(2)图像方位向分辨率由天线波束宽度决定,为了提高分辨率,因此天线增益很高,造成很强的等效全向辐射功率(EIRP),如此强辐射能量可能会造成未来潜在的电磁兼容问题,带来机载设备安全风险,或人身健康风险。本文所用天线增益为12 d Bi,低增益天线有助于降低EIRP,从而易于满足未来电磁兼容性和人体安全要求。
(3)毫米波频段上实现极窄的波束宽度,对反射式天线的加工精度要求极高,而且实孔径成像对转台位置精度的要求也很高,采用波导组件,造成加工成本也大幅提高,其制造成本较高。本文低增益天线价格低,降低了制造和维护成本。
5 结 论
(1)本文开展了圆弧合成孔径雷达信号模型研究,圆弧合成孔径成像雷达不仅具有常规机载或星载的线性轨迹合成孔径雷达成像能力,又由于转臂的旋转使得其具备全方位观测能力。
(2)圆弧合成孔径雷达对同样目标的探测距离提高2~3倍,并能有效抑制雨雪等“闪烁”杂波。
(3)此外,圆弧合成孔径雷达采用低增益天线设计,制造和维护成本低,满足电磁兼容性和人体安全要求,市场前景广阔。
猜你喜欢
建材发展导向(2022年4期)2022-03-16 06:11:48
科学与信息化(2021年30期)2021-12-24 08:00:20
科学技术创新(2020年6期)2020-04-18 06:17:46
西南石油大学学报(自然科学版)(2018年2期)2018-06-26 06:19:12
雷达学报(2017年1期)2017-05-17 04:48:53
光学精密工程(2016年1期)2016-11-07 09:01:53
西北工业大学学报(2015年3期)2015-12-14 13:08:44
遥测遥控(2015年2期)2015-04-23 08:15:22
机械工程师(2015年10期)2015-02-02 01:13:57
西安建筑科技大学学报(自然科学版)(2014年1期)2014-11-12 13:03:36