系留悬浮式风力发电技术的研究进展与展望
2021-08-30 02:26刘耀广王耀坤万志强严德
航空工程进展 2021年4期
刘耀广,王耀坤,万志强,严德
(北京航空航天大学航空科学与工程学院,北京100191)
0 引 言
清洁能源的开发已成为各国的研究重点,而风能作为一种无污染、可再生、成本低、相对安全、方便采集的新能源有着巨大的发展潜力,近十年全球风力发电规模保持快速稳定的增长趋势。我国自2005年颁布《可再生能源法》以来,已形成上网电价、研发补贴、税收优惠等多种鼓励政策,形成良好的发展环境。现如今中国已成为全球规模最大、增长最快的风电市场。因此作为我国第三大电力能源的风力发电仍然具备强有力的发展势头。
目前开发风能的主要方式是低空架设风力发电设备,其本身存在局限性:(1)主要利用200 m以下的低空风能,风速较低且通常是湍流,风力发电容量系数(风力机年平均输出功率与其额定输出功率的比值)一般低于35%;(2)基建与安装复杂,成本昂贵,与高度的5次方成正比;(3)只能固定安装在常年风场条件较佳的地区,部署受限。因此,低空架设风力发电设备无法依靠传统形式获得高产能、低成本的电力资源。
500~12 000 m的高空范围内蕴含丰富的风能资源,足以满足全世界的能源需求。为此在20世纪70年代诞生一种利用系留飞行器进行高空风能发电的设计概念,但早期受制于技术难度大、成本投入高等问题,高空风力发电优势不明显,研究不多。近几年得益于航空材料、飞行控制、空气动力学等航空技术的深入研究,以及对清洁可再生能源的重视,已有包括Makani、KiteGen等50多家高空风电机构利用系留式的固定翼、风筝、多旋翼、浮空器等航空器进行试验研究。其应用优势主要体现以下3点:(1)高空强劲的风场使风力发电容量系数达70%以上;(2)降低土地需求和建设成本;(3)可移动部署,应用场景多样化。预计未来高空风力发电将迎来新一轮发展契机。
高空风力发电技术形式繁多,导致现有研究类型划分和研究重点各不相同。王若钦等根据飞行原理的不同,将高空风力发电分为切风模式和非切风模式,并对切风模式的特点与挑战进行了论述;M.Barnard根据飞行状态的不同,将其分为切风飞行和静态飞行;高金兰等则主要根据飞行平台的结构形式和发电方式将切风飞行的风力发电飞行平台划分为不同种类。而本文所述的系留悬浮式风力发电是指飞行平台通过缆绳系留地面,并以非切风的方式飞行,相对静止或单纯的上下浮动,整体速度较低。该形式控制简单、飞行安全可靠、功率输出相对平稳,具有显著的发展优势。
本文通过分析系留悬浮式风力发电系统的组成和发展现状,梳理系留悬浮式风力发电的主要技术类型和特点,归纳并展望未来需要进一步探索的关键技术。
1 系留悬浮式风力发电的一般系统组成与发展现状
1.1 系留悬浮式风力发电的一般系统组成
系留悬浮式风力发电平台主要由飞行平台、系留缆绳、发电机、地面基站四部分组成。
(1)飞行平台的主要作用是提供维持留空的升力,包括浮升力或气动升力以维持空中悬浮,部分也提供姿态调整的气动控制力,并搭载发电机等设备捕获风能。
(2)系留缆绳连接飞行平台和地面基站,将飞行平台束缚在一定的高度区域内运行,也可具备电力传输的功能。
(3)发电机主要作用是将风能转化为电能,但为满足提供气动升力的需求,也存在发/用电状态的电动发电机。根据发电机位置不同,可以分为空基和陆基两种,即发电机安装在飞行平台上或发电机置于地面。空基高空风电与传统风电模式类似,利用气流吹过叶片平面带动发电机发电;陆基高空风电则主要通过飞行平台以某种飞行方式带动缆绳往复牵引地面发电机转盘旋转,从而产生电能。
(4)地面基站主要控制缆绳的长度,同时使发电机输出电力可利用,实现电力储存或并网。
1.2 系留悬浮式风力发电技术发展现状
国内外对系留悬浮式风力发电研究较多,且技术形式多样,不同之处主要体现在飞行平台飞行原理和发电方式,技术形式各有优势。目前筒形浮空风力发电、基于马格努斯效应的浮空风力发电、高空多旋翼风力发电以及伞梯组合式风力发电均有所突破,下面对国内外这四种类型进行详细阐述与分析。
(1)筒形浮空风力发电
飞行平台外形类似筒形气囊,飞行原理与浮空飞行器相似,依靠筒形气囊内氦气的浮升力升空,筒形中间为变截面的气流通道,通道中央的风力发电机迎风发电,通过飞行平台的系留缆绳将电能传输至地面。这种形式的好处是风能提取有超越贝茨极限(贝茨极限是指风力发电机在理想条件下,将自由气流动能最大程度转化为风轮输出功率的比例为59.3%)的可能,现实中常规风力发电机的风力利用系数无法达到这一数值,而筒形浮空风力发电利用先收缩后扩张的变截面气流通道,提高叶轮前的气流速度,即V
>V
,发电机转盘平面上的气流功率超过环境自由流中的气流功率,在一定程度上能使功率系数超过贝茨极限。气流通道形状如图1所示。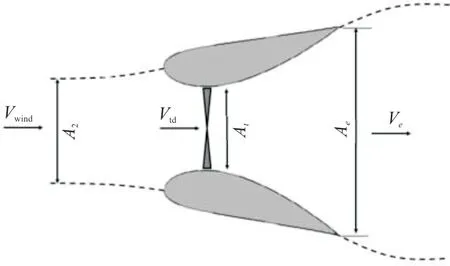
图1 气流通道形状[12]Fig.1 Shape of airflow channel[12]
该技术形式以美国Altaeros Energies公司研制 的Buoyant Airborne Turbine(BAT)为 代 表 ,BAT运行高度最高达600 m以上,最大可承受44.7 m/s的风速,可自主起飞或降落,能够自动调整引导平台进入强风高度,并且在大风或强降雨等恶劣的天气时,能够自主停靠地面站点,待条件允许后继续升空发电。BAT试验机如图2所示。

图2 BAT试验机[13]Fig.2 Test generator of BAT[13]
这种技术类型由于依靠浮升力升空,无需通过消耗额外能源克服飞行平台重力,使其可以最大限度将风能转化为电能;对风场条件要求较低,易实现自动起飞降落;工作状态相对稳定安全,且容易运输部署。这些特点更适合在风场条件不佳或不稳定区域发挥作用,比如灾区或者军事基地等地区的临时紧急供电。多股系留缆绳不仅控制飞行平台整体运行高度,其缆绳间的差动控制也可调整飞行平台姿态,因此姿态控制方式简单。但是由于无法保证气囊完全密闭,氦气等轻质气体存在泄漏,需要定期补充,增加额外的运营成本;且受制于浮空气囊庞大的体积、重量受限和结构刚度等问题,工作高度难以提升,发电功率规模也难以做大。
(2)基于马格努斯效应的浮空风力发电
该类型飞行平台主体近似椭球形浮空器,运行时椭球轴线与地面平行同时垂直气流方向,内部氦气提供浮升力;囊体外安装有气流叶片,两端设有发电机,再通过系留缆绳连接地面,气流经过表面叶片时提供旋转扭矩,气囊整体绕轴线旋转带动两端发电机工作,通过缆绳向地面输出功率。该类型充分利用马格努斯效应,即垂直于气流方向旋转的物体,由于流经物体两侧表面的相对流速不同,使得两侧面产生压力差,进而产生向上的偏转力,且随风速增加而增大。
Magenn Power公司采用此技术路线,其研制的风力发电平台命名为Magenn Air Rotor System(MARS),MARS工作在300 m以内的高度范围内,适用风速为2.5~30 m/s。MARS试验机如图3所示。

图3 Magenn Power的试验机[17]Fig.3 Test generator of Magenn Power[17]
此种形式的升力来源主要为浮升力,但与传统浮空器不同,其还利用马格努斯效应产生部分动升力;马格努斯效应提高总升力的同时,也能使空中平台稳定在预设高度受控且受限的范围内,减小平台向后向下漂移。另外其风力发电模式与传统方式不同,平台整体垂直于风向旋转产生陀螺效应,具有稳定性;且转速较低,对鸟类相对安全。但是此形式具有较大的迎风面积,同时整体绕转轴旋转,对浮空气囊结构的强度和刚度提出较高要求,另外也面临气体泄漏以及工作高度和发电规模受限的情况。
(3)高空多旋翼风力发电
高空多旋翼风力发电是一种类似于系留多旋翼的设计,不同之处在于采用电动发电机,既能用电提供升力,又能在气流带动下发电输出电力。平台升空时类似于系留多旋翼飞行器,由地面提供电力通过系留缆绳驱动电动发电机带动旋翼产生升力升空,待到达目标高度,控制器将使多旋翼平台整体倾斜一定角度,在此过程中双工况电机逐渐由用电转为发电,在空中旋翼平面与水平面成一定角度,气流流过旋翼平面,旋翼旋转带动双工况电机发电,同时旋翼受力的竖直分量作为升力,保持平台稳定悬浮在空中,旋翼产生的电能通过系留缆绳传输至地面。平台姿态控制通过旋翼之间的差动实现。
美国Sky Windpower公司研制的Flying Elec‐tric Generator(FEG)风力发电技术采用此种形式,在机架上安装有四个双工况旋翼,机架通过系留缆绳连接地面。FEG设计目标是利用4 500~9 000 m高空内的大气急流区的高速气流,旋翼平面最高可倾斜50°,在4 600 m的运行高度上,满足滞空和能量输出的最小风速约为10 m/s。目前该公司已经完成原型机的测试,能够完成从自动起飞、到达预定高度、转换工作模式到自动着陆完整工作流程。FEG模型如图4所示。

图4 FEG模型[21]Fig.4 Model of FEG[21]
该形式飞行平台起飞或降落时对旋翼供电产生升力,易实现自主起飞降落;主要适用高风速环境,因此高海拔可以充分利用高速气流的优势;但对高风速环境的依赖又限制了多样化应用,应用场景较为单一。同时为了避免高海拔对航空安全的影响,也要增大多设备同时运行时的间距,系留缆绳的重量也成为影响平台性能的重要因素;倾斜角度与风速有关,因此气流并非垂直进入旋翼平面,很大一部分风能用来维持平台滞空,影响风力发电转化效率。
(4)伞梯组合式风力发电
该类型主要包括空中系统和地面系统:地面系统主要为发电机及附属设备;空中系统由多个做功伞、平衡伞以及飘空气球组成,间隔分布在缆绳上,利用多伞兜风实现风能的高效利用,飘空气球和一直处于打开状态的平衡伞提供系统升力和保持系统空中稳定。做功伞在风场内通过反复开合带动空中整体上下往复运动,牵引缆绳带动地面发电机发电;做功伞打开时整体拉升处于发电状态,做功伞收起时整体下落,处于发电准备状态。伞与伞之间、做功伞与地面系统之间是通过轻质高强度缆绳连接。伞梯组合演示图如图5所示。

图5 伞梯组合演示图[23]Fig.5 Illustration of multi-stage umbrella[23]
我国广东高空风能技术有限公司研发的伞梯组合式风力发电命名为天风技术。该系统设计目标工作在500~10 000 m高空,系统采用模块组合结构,通过调整系统运行高度和改变模块数量实现发电功率10~1 000 MW可调节,目前已突破空中系统控制稳定性问题。
伞梯组合式风力发电运用全新的理念,将升力平衡系统和做功系统分开、单独控制,两者互不影响,同时由于圆形伞结构的单一自由度,系统只需控制伞的开合带动牵引缆绳实现升降运动,自稳定性较好;伞梯组合受风面积更大,单位面积下的风能利用率更高;另外可以通过改变做功伞的数量实现稳定的功率输出或系统功率的扩容;但其复杂的工作模式对飞行控制要求较高;同时由于往复运动的发电模式导致功率输出不稳定。
2 系留悬浮式风力发电的关键技术
通过对国内外现有系留悬浮式风力发电技术原理与特点的分析,充分结合当前空气动力学、航空材料、飞行控制等专业的发展,以及目前国内外相关的研究热点与进展,归纳出未来系留漂浮式风力发电中需要重点突破的航空相关技术。
2.1 轻质高强系留缆绳设计与制造技术
飞行平台的升空、回收均由系留缆绳提供牵引功能,承受较大拉力;数百米的系留缆绳被提升至空中,为飞行平台带来额外的重量,同时系留缆绳受到的气动阻力也是限制工作高度上限和效率的主要因素之一;产生的电力只能依靠缆绳传输至地面,需要满足电力传输效率,部分还具有信号传输的要求,以监控设备运行;另外为保护设备免受雷击破坏,系留缆绳也应具有一定的防雷、泄雷作用。因此系留缆绳需要同时具有系留强度、轻质密度、电力传输、防雷击等各项综合性能。
常规系留缆绳的承力元件一般由纤维制成。目前Kevlar 49芳纶纤维是大多数系留缆绳的首选材料,线密度为1.44 g/cm,具有2.8 GPa的抗拉强度、500℃的耐热温度以及115 GPa的拉伸模量,材料成本较低;而PBO纤维在1.54 g/cm的线密度下具有5.8 GPa的抗拉强度、270 GPa的拉伸模量和650℃的耐热温度,其强度和模量约为普通芳纶的2倍,特别是弹性模量,由于其直链高分子的特征,被认为具有极限的弹性模量,综合性能及其优越,但受到国外垄断和进口限制,价格昂贵,无法普及应用。系留缆绳在长期反复承受大拉力情况下,其各层抗拉结构间容易产生磨损,产生疲劳损伤,导致性能下降,影响安全性与可靠性,这是系留缆绳设计过程中着重需要注意的问题。
结合目前系留缆绳的现状与应用,总结未来发展趋势主要集中在以下3点:(1)小型轻质化,新型材料技术的不断应用,可以利用体积与密度较小的抗拉件、电力传输件达到较高的抗拉强度与电力传输效率要求,也利于提高运行高度,这对提高飞行平台整体性能具有重要作用;(2)高强度与耐疲劳,高强度与耐疲劳属性确保系留缆绳寿命与使用可靠性;(3)功能多样化,目前系留缆绳可以实现高载重、高抗拉强度与耐疲劳性能、优良电力与光纤传输等要求,但随着系留飞行技术的不断发展,必然出现满足更多功能需求的复合型系留缆绳。进一步探究和提升轻质高强系留缆绳设计与制造技术,很有必要综合考虑成本、密度、强度与耐疲劳性能、环境适用性等各方面因素。
2.2 高性能囊体复合材料技术
系留悬浮式风力发电技术的目标是在足够的高度下长时间滞空运行,因此浮升囊体材料的重量与气密性是决定浮升平台能力的关键。而气体透过率大小与气体、材料种类、材料的宏微观结构、环境温度、缝合工艺等方面都有显著的关系。
目前具备优良性能的复合材料技术被少数先进国家掌握,导致价格高昂、使用受控。如德国齐柏林飞艇公司skyship600载人飞艇的囊体采用层压工艺,具有优良的气密性,使氦气损耗率维持在每月1%的水平;美国TCOM公司的Mark-7s系留气球材料利用不同属性的层压材料制成,抗拉强度40 kg/cm,氦气渗漏率0.5 L/(m·d·atm),面密度278 g/m,而国内大部分中小型系留艇由于囊体材料揉搓后气密性变差以及制作工艺差距导致材料连接处易泄露,氦气耗损率高达每月10%。
开发特性优异的囊体复合材料以及加工工艺精细化是囊体材料技术的关键,而具备强度高、重量轻、耐环境、低气体透过性、抗皱折、耐刮擦等优良性能的囊体材料将大幅提高浮空飞行器性能,因此先进的复合材料设计技术与制备工艺将会是囊体材料的重要突破口。
2.3 稳定与智能控制技术
保证发电持续性和稳定性的控制技术是目前高空风力发电主要技术难题之一。目前系留悬浮式风力发电控制还难以在完全脱离人工干预下自动运行,并且高空风并非一成不变,存在风速风向突变与风梯度渐变的问题,导致飞行平台飞行轨迹偏离、飞行状态紊乱以及影响系统做功的稳定输出,尤其在运动系统和做功系统相互耦合、相互影响的情况下,持续性和稳定性更难以得到保障。
王英勋等将飞行器的自主控制能力由低到高分为六级,最高程度的自主控制表述为能够自学习且具有集群自组织协调的能力。高级的自主系统必须具有良好的学习和自我修复能力,能够及时适应环境突变,解决不确定性带来的复杂问题,在无人介入的情况下实现高效稳定运行。因此对于系留悬浮式风力发电的控制系统,应实时感知甚至预测周围风场变化,并及时给予调整来适应环境,保证运行稳定。且当环境不利于正常运行时可自动回收待机,待环境允许时再自动放飞运行,达到高可靠性的目标。另外平台若能够获取周围风场参数,感知一定区域风场内高风速位置,控制系统在没有人工干预的条件下,自动调整工作状态,使风力发电平台飘移至高风速处运行,即控制系统具有趋利飞行的能力,最大程度提高发电功率,并且近几年不断推陈出新,对各类新型飞行器的控制机理、复杂的耦合特性、气动弹性效应等研究也将逐步深入。因此未来系留悬浮式风力发电控制技术将实现控制稳定可靠、趋利智能等目标。
2.4 高效风力发电飞行平台总体设计技术
国内外各研究机构自20世纪便提出形式多样的高空风力发电技术形式和专利,但目前广泛应用的类型局限在几种特定形式,依托常规飞行平台升空,缺少总体方案与构型的创新设计,优化措施大多限制在结构材料、系统稳定控制等,对风力发电能力和环境适用性的提升并不明显。如高空多旋翼风力发电为满足悬浮条件,桨叶平面与风向并不垂直,难以实现风能的高效转化;同时其完全依靠旋翼动升力升空,实现空中稳定悬浮与功率输出必须依赖长久稳定的大风速环境。
高空风力发电应紧密结合飞行器前沿研究。闫溟等以筒形浮空风力发电为基础,探究浮空器几何尺寸、风速、风轮半径和转速变化对飞行平台运行高度、发电功率输出以及发电成本产生的影响,并得到该形式下的最佳发电模式;另外杨穆清等针对升浮一体飞行器的研究表明,其与常规飞行器相比具有较为突出的综合优势。因此高效风力发电飞行平台总体设计技术是技术突破的重要途径,从飞行器总体设计与方案优化的角度入手,进行创新性布局以及系统的综合优化,进而探索新型高效的系留悬浮式风力发电技术模式。
2.5 便利展开部署技术
目前部分系留悬浮式风力发电技术已具备快捷回收、起飞或可运输的功能,如BAT可实现与运输车辆一体化安装设计,系统可在24 h之内部署。但在设计上普遍还无法达到整机一体化、功能多样化、快速部署等目标,考虑到未来具有商业化的趋势,同时具有规模化应用到灾区、军事基地等特殊场景的需求,方便快捷地部署、起飞、收纳和运输也将会成为表征技术性能的重要指标。
美国的REAP快速升空气球平台的地面系统集成在一辆多用途机动轮车上,车上安装有氦气储存罐,可直接向气囊充入氦气,进行放飞;另外与常规的单点或多点系留飞艇起落架装置相比,新型气垫式起降装置是柔性体与刚性体的结合,能够提供更加稳定、可靠的起降过程,但目前仍处于试验阶段。同时集成多种功能的地面基站的重要性并不亚于飞行平台本身,如多功能随动基站的设计保证飞行平台状态变化时,基站控制多点系留缆绳快速响应并给出适应性调整。对于发电功率不连续的陆基发电机,需要配备相应的整流与变压设备。因此针对便利快捷放飞运行的目标,需要在辅助设备集成、运输车辆适配、功能多样化等多个角度进行针对性研究,便利展开部署也将成为系留悬浮式风力发电技术的重要研究方向。
3 结束语
在风力发电高速发展的总体趋势下,系留悬浮式风力发电作为一种结合航空技术拓宽风能利用范围的技术形式,在应用场景多样化、相对简单可靠、低成本与高产能等综合优势下,必将迎来新一轮的发展机遇。
但目前整体仍处于初步研究发展阶段,尤其国内该领域研究大部分仍停留在专利技术论证,还未形成工程应用的趋势,已与国外形成明显差距。同时由于系留悬浮式风力发电技术依托飞行平台总体设计、高性能复合材料、飞行与运行可靠控制等多种相关关键技术,是较为敏感的前沿技术领域,受到国外的严密封锁,关键部件仍依赖进口。因此系留悬浮式风力发电技术发展亟需复合材料、总体设计、自动控制等多学科的协同发展与综合运用以及相关核心技术的创新性突破,以促进我国在该领域实现超前设计与应用。在重视可再生清洁能源的有利背景下,抓住当前发展契机,进而保障我国在风力发电领域的总体优势。
猜你喜欢
航空学报(2022年7期)2022-09-05
中国新通信(2021年11期)2021-08-16
直升机技术(2021年2期)2021-06-17
科技创新与应用(2020年10期)2020-04-24
上海海事大学学报(2019年4期)2019-12-30
工业设计(2019年9期)2019-11-04
航空模型(2017年3期)2017-07-28
珠江水运(2017年11期)2017-06-27
企业文化·下旬刊(2016年9期)2016-11-05
广东第二课堂·小学(2016年6期)2016-05-14