动中通天线的俯仰角自动跟踪方法
2021-08-16 05:02罗帆飞
中国新通信 2021年11期
【摘要】 本文介绍了一种悬浮式动中通天线,并对其具体结构、工作原理及实现方法做了详细阐述。实验表明这一装置在载体运动时可自动保持天线的俯仰角不变,对提高对星速度和精度有利。
【关键词】 动中通 天线 悬浮式 重心调节
Sat-com on The Move Automatic Tracking Method of Antenna Pitch Angle
Luo fanfei East Power Plant of Shenzhen Energy Group Co. Ltd. Shenzhen 518000
Abstract: In this paper, a kind of floating dynamic medium pass antenna is introduced, and its specific structure, working principle and implementation method are described in detail. Experimental results show that this device can automatically keep the antenna pitch Angle unchanged when the carrier is moving, which is beneficial to improve the velocity and precision of the satellite.
Key words:Sat-com on the Move Antenna Floated Center of Gravity Adjustment
引言:
移動中的卫星地面站通信系统,英文简写为“Sat-com on the move”,俗称动中通,可以装载在汽车、轮船等交通工具上,运动过程中实时跟踪卫星等平台,传递语音、数据、图像等多媒体信息,为行进中的交通工具提供卫星通信服务,是一种新的通信模式。
因是运动中的卫星通信,天线对星精度问题显然是保证通信质量的关键技术所在,是天线生产中重点关注的问题。根据对星方式的不同,天线结构差异很大,天线从技术上可以分为相控阵天线(平板)、光导陀螺天线(包括光纤陀螺和激光陀螺)和信标跟踪天线。无论何种形式的天线,都是通过检测天线在随载体运动时产生的位置变化信息,自调整或通过控制枢纽指挥伺服机构动作,调整天线的俯仰角、方位角和极化角,达到保持对星精度的目的。
然而,现有生产的各类天线的对星精度受位置信息检测机构的精度和伺服机构的响应时间的约束,无论是载体运动中的实时对星,还是载体通过隧道、涵洞等信号盲区后的重新对星,反应速度和精度还存在很大的提升空间。下面介绍一种悬浮式天线架,可在载体运动时自动保持天线俯仰角不变,对提高天线的对星精度和增大反应速度有利,其结构和工作原理分述如下:
一、悬浮式天线座的结构和工作原理
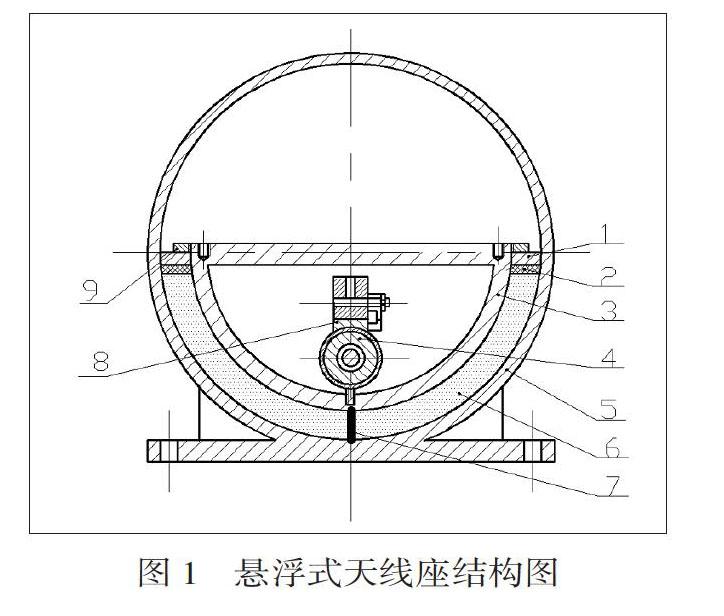
众所周知,盛放在容器内的液体,在液体表面不产生波动的情况下,无论容器发生前后左右任意位置的倾斜,液体表面将维持与地平面的平行不变。显然,如果将天线悬浮在容器的液体内,当容器发生倾斜时,天线的俯仰角将不会发生改变,放置在车辆上,无论行进中的车辆上下坡还是左右摇晃,天线的俯仰角都自动维持最初校正好的角度不变,换言之,具有悬浮结构的天线,在载体运动时,能自动维持天线的俯仰角不变,对行进中维持对星精度和载体通过信号盲区后的快速对星都十分有利。悬浮式天线座具体结构如下图1所示。
图中5为球形液体容器,为了获得足够大的浮力,容器下部的液体用的是水银6。3是悬浮座,用来放置天线,图中天线未画出。
1.1防止水银溢出的措施
为了防止水银溢出到悬浮座上部,加装了滑套密封环 2 和保持环 1。密封环用来防止水银溢出;保持环用来定位密封环的位置。装配时根据整个悬浮装置浮出液面的高度调整水银加入量和保持环的位置,使保持环上表面与通过容器 5直径的水平切面平齐。调整完毕,用定位螺纹环 9 将位置固定。保持环 1 上表面为圆形,其直径等于容器 5 内壁的直径,保持环 1 和密封环 2 的侧面为弧形结构,使二者随悬浮座 3 运动时能与容器 5 内壁始终接触良好,既能自由运动,又能良好密封,阻止容器 5 下部液体渗漏到容器上部。
1.2减缓液面波动的措施
为了减小载体运动时液体惯性力对天线俯仰角的影响,增强俯仰角的稳定性,另外附加有弹性连接带7, 其二端通过胶粘连接容器 5和悬浮座 3,连接带具有良好的弹性,可有力减缓整个悬浮体的波动。
二、悬浮体重心调节方法及作用
根据物理学理论,为了保证包括天线和悬浮座在内的整个悬浮体在水银中不发生倾倒,其重心必须在容器5下部,且重心线通过容器5的球心。
2.1静态下重心调节方法
因此在悬浮体上安装了调整平衡块8 和重心自动调节装置4。平衡块的位置和重量,必须保证整个悬浮体的重心在液面以下,并使整个悬浮体的重心通过容器5的球心,确保整个悬浮体悬浮在水银中不会发生倾斜和侧翻。
2.2动态下的重心自动调节方法
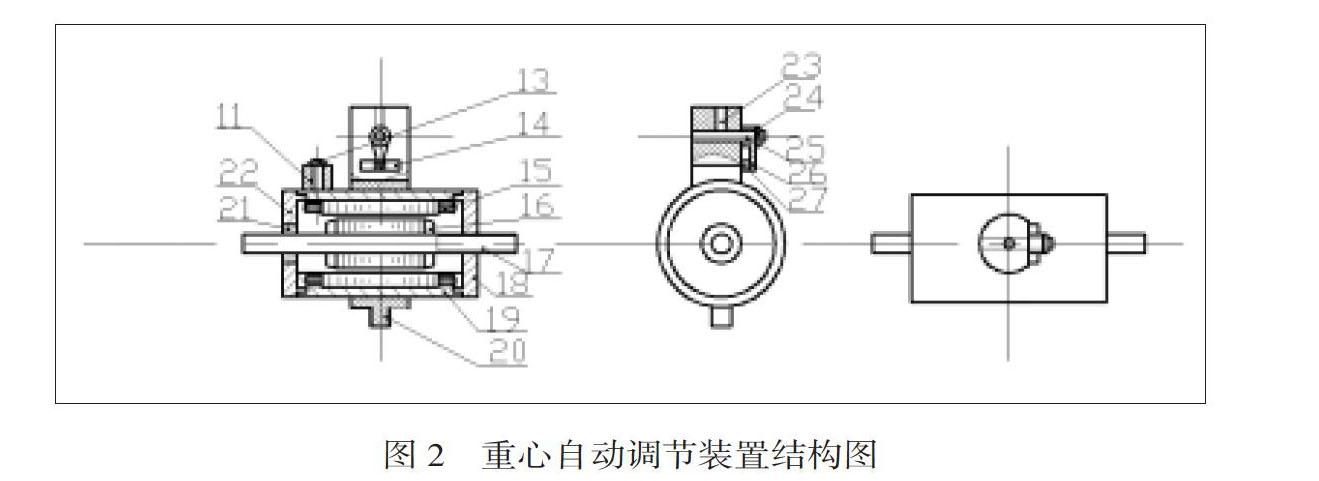
重心自动调节装置结构如图2所示。
图2所示重心自动调节装置包括重心调节电机和平衡检测装置二部分。重心调节电机包括机壳 19、定子 15、转子 16、轴 17、前端盖 18、后端盖 22 和滑动轴承 21。其中,轴 17位于前端盖 18 一端有螺纹,与端盖 18 为螺纹连接;轴 17 在后端盖22 一端与滑动轴承 21 配合中没有轴向定位,滑动轴承轴向固定,轴可以沿轴向运动。当重心调节电机给电后,因前端盖 18 与轴 17 为螺纹连接,该电机正、反转时,转子 16 将随轴 17 做轴向移动,整个重心调节电机的重心也将沿轴向移动,由于该电机通过固定环 20安装在悬浮座 3 中,电机重心的改变也就改变了整个悬浮装置的重心。平衡块 8 安装在机壳 19 上,用于俯仰角调整前悬浮装置的重心和平衡调节,在俯仰角调整过程中其位置固定不变。
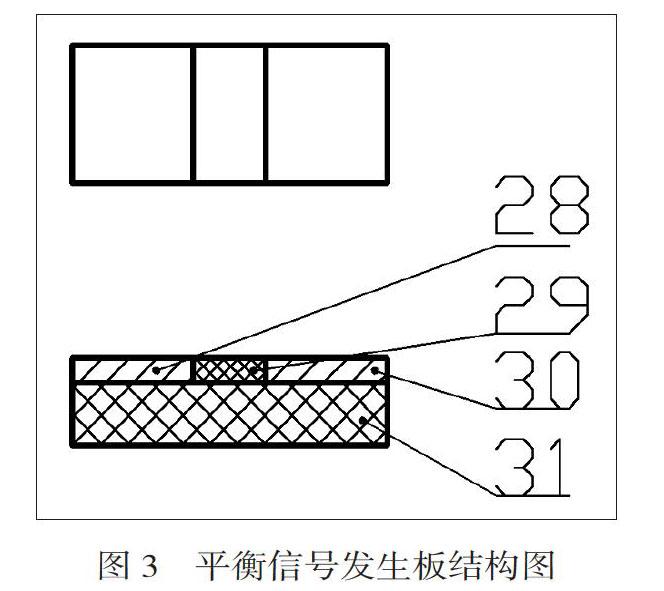
重心调节电机的转向由平衡检测装置控制。它包括平衡指钟 26、指钟轴 25、平衡信号发生板 27、卡环 24 等,平衡指钟 26 滑套在指钟轴 25 上,可绕轴 25 自由转动,通过卡环 24 进行轴向限位,平衡指钟 26 与平衡信号发生板 27 表面接触,平衡指钟 26、平衡信号发生板 27 的二个金属片都有导线与外电路相连,导线通过出线孔 23 引出,图中连接导线没有画出,为了减少绝缘处理的难度,指钟轴 25 和安装指钟轴的固定环 20 都用绝缘材料制造,平衡信号发生板 27 的具体结构如图 3 所示。
图 3 中左金属片 28 和右金属片 30 之间嵌入绝缘片 29,三者通过粘接的方法固定在绝缘板 31 上,形成一個整体,三者的外表面平齐,保证平衡指钟 26 运动时与金属片和绝缘片都良好接触。当悬浮体重心偏离容器5球心线时,平衡指针将与左或右金属片接触,接通重心调节电机电源,电机旋转使悬浮体重心向球心线移动,当悬浮体重心与球心线重合时,平衡指针处于左右金属片中间俯结缘片上,截断重心调节电机电源,悬浮体重心位置维持不变。
2.3重心自动调节装置的工作时序
重心调节电机可用单相异步电机、直流电动机和步进电机等。由于天线的重心会随俯仰角不同发生变化,因此,重心调节电机必须在俯仰角和极化角电机停止工作后方可启动。因为通信卫星是与地球的同步卫星,在载体静态下调整好天线俯仰角,载体运动时俯仰角无须调整,只需维持不变,所以,重心调节电机滞后启动,不影响天线工作。具体控制可用继电器等有触点电路,也可用使用PLC或单片机等构成控制电路,不再赘述。
三、结束语
由上所述可知,通过重心自动调节装置及相应的附件保证了整个悬浮体重心线位置不变,保证了悬浮体稳定悬浮在水银容器中不发生倾倒。由于天线是整个悬浮体的一部分,因此,在载体运动中天线与地平面的角度不变。也就是说在天线对星完成后,载体运动中,无论上坡下岭或左右摇摆,无须天线中的俯仰角调整机构动作,天线的俯仰角可自动维持不变,既保证了载体运动时对星精度,又在载体通过信号盲区后缩短了重新对星时间。
参 考 文 献
[1]罗帆飞,液体悬浮式天线架及动中通天线自跟踪平台,专利号:201511033810.8
[2]姜安,朱军.基于相控阵天线的 “动中通”卫星通信终端研究[J],电子工程师,2008,34(10),24-26。
[3]余伟平.张鹏.伍宗伟.等,车载动中通伺服系统研究设计[J],武汉理工大学学报,2009,31 (6),98-101。
猜你喜欢
汽车观察(2020年4期)2020-05-27
工业设计(2019年9期)2019-11-04
汽车观察(2019年4期)2019-07-01
汽车观察(2019年4期)2019-07-01
移动通信(2019年2期)2019-03-27
发明与创新·大科技(2018年2期)2018-03-17
CHIP新电脑(2016年7期)2016-07-18
广东第二课堂·小学(2016年6期)2016-05-14
国外科技新书评介(2014年4期)2014-12-17
智慧与创想(2013年5期)2013-06-25