空域网格化方法及其在空管中的应用研究
2021-08-30 02:26朱永文谢华蒲钒张颖何巍巍
航空工程进展 2021年4期
朱永文,谢华,蒲钒,张颖,何巍巍
(1.国家空域技术重点实验室,北京100085)
(2.南京航空航天大学 民航学院,南京211106)
(3.国家空管飞行流量管理技术重点实验室,南京211106)
(4.中国航空无线电电子研究所,上海200241)
(5.民航空管航空电子技术重点实验室,上海200241)
0 引 言
空中交通管制和流量管理技术都是基于特定的空域结构开展的。现有空域结构建模包括两种方式:第一种是空中交通管理分区的结构,对应于从空中交通航路管制中心区域、终端管制区域及其内在划分的空中交通管制扇区,采用基于欧拉模型(Eulerian Models)的空中交通流量管理方法,主要是对这种空域结构建模,按照面元进行空中交通流量分布计算控制,实现其状态转移控制策略分析;第二种是对空中交通流的路径建立结构,按照空中交通路径分配空中交通流,制定控制策略及模型,形成问题分析的另一种思路方法,即拉格朗日模型(Lagrangian Models)方法。这两种空域结构建模,实际上是从问题分析的不同角度出发建立的控制策略方法,具有不同的适用性。随着研究的深入,尤其是空中交通运行积累了大量的数据之后,从数据中抽象模型参数及问题特征,逐渐对第一种基于空中交通管理分区的欧拉模型进行拓展应用,从而形成了对空域数字化建模的系列进展。
空中交通管理研究属于空间位置转换、同现实需求密切相关的研究领域。空间位置定义及描述,伴随数字地球概念的提出与研究的深入,对交通发展造成了影响巨大。美国运输研究会提出“交通地理信息系统(数字地球的核心技术之一)在未来交通系统各部门的使用,将像现在使用Of‐fice那样普遍”。空中数字交通系统从数字地球的战略高度规划交通飞行信息采集、处理和综合应用,按照空间、时间坐标将与空中飞行相关的信息记录下来,建立基于四维时空框架的数据组织管理方法,开展分析获取研究对象的特征、模式和规律,进而实现对系统的管理控制。从数字地球技术视角,建立空域格网单元剖分方法,构建基于网络索引的空中交通大数据分析框架,也有助于开展有关的空域性能度量测量技术方法研究。
传统的空中交通在信息技术推动下,目前处于“空中数字交通”时代,随着人工智能技术的兴起,未来向着“空中智慧交通”发展。传统的空中交通,主要通过人工调查和模型推断,构建空中交通各机场之间的源端—目的端需求矩阵,获取空中交通静态需求分析矩阵,制定相应大尺度空间的空中交通管理策略,规划空中交通航路网,按照空中航路网实施空中交通组织与管理控制。“空中数字交通”,建立在空地一体化通信网络、星基与地基综合的高精度航空导航、融合增强的空地协同监视和计算技术基础上,其基本构成内容包括动态、实时、全面的空中交通位置感知识别,冲突探测和解脱,空域动态管理控制。未来“空中智慧交通”强调对空中交通数据的深层次挖掘和知识获取,实现具有自学习、联想、推断等智能化特征的空中交通路径设计与选择,形成智能化的空中交通状态预测预估告警、空域复杂度管理与控制,围绕空中交通流需求动态供给空域资源使用,实现空域与空中交通流量自适应协同。不管是目前正在深化发展的空中数字交通,还是未来的空中智慧交通,构建空域离散格网单元并建立空域数字化模型都是空中交通管理的重要基础。
本文首先介绍空域网格的基本概念,对空域网格化方法进行总结;然后对空域网格化方法在空管航迹规划、冲突探测、空域规划及空域配置等方向的应用研究进行综述;最后总结了空域网格化的研究重点,指出了空域网格化及其应用研究的未来发展趋势。
1 基本概念
1.1 空域格网单元定义
根据空中交通特性将空中交通管理区域递归划分成若干大小一致、相互链接的基本空域体单元,每个单元在空中交通数据组织管理之中相对独立,称这些单元为空域格网单元。
该定义说明,空域格网单元不仅仅是一个几何空间体,还是一个空中交通数据组织索引,其不同于空中交通航路网络形态,强调的是在空中交通航路网络空间划分的基础上,实现将几何空间体及空中交通数据和信息的物理划分管理。空域格网单元具有如下特性:一是动态性,空域格网单元的动态性不是指动态空域格网单元,而是指静态空域格网单元具有的动态性,即在一定时间周期内是相对稳定和固定的,但随着空中交通系统的发展,如空中交通密度、航路网结构变化等,其尺寸大小可不断精细化,其对数据的组织管理呈现动态性;二是虚拟性,空域格网单元并不是在空域内明确划分出格网单元来,而是作为一种数据处理、优化配置和调度管理的基本单位,是一种在信息空间内建立的虚拟结构;三是自治性,划分空域格网单元的一个重要目的就是降低空中交通的复杂程度,使得空中交通格网单元内的飞行管理控制在一定范围内,能够充分自治,相当于一个相对的整体运行于空中交通系统之中;四是精确性,通过空域格网单元可以将空中交通控制域具体定量化、单元化,有助于动态配置和管理空域;五是协同性,空中交通系统的强耦合特点,决定了不具有可以完全独立存在的空域格网单元,这样不同层次空域格网单元之间就存在协同的问题。
1.2 格网单元地址编码转换
根据空域网格化剖分建模方法,空域投影在地球的表面之后,通过全球格网模型,建立逐级递归的球面剖分,构建空域格网系统(Airspace Pro‐jection Plane Grid System,简称APPGS),对格网系统的一个剖分单元建立其唯一的二进制地址Morton码;将APPGS单元映射到矩阵空间内,可以构建相应维度的大规模矩阵G
,按照对应的行列与APPGS的剖分单元建立一一对应关系,根据所建立的格网模型特征,把相应真实存在的有意义格网单元的地址码作为矩阵元素,不存在的无意义的格网单元对应的矩阵元素填充“-1”,则可以实现空域格网系统与矩阵空间元素的一一对应关系,也可以实现格网单元二进制地址Morton码与矩阵的行号、列号的相互转换。1.3 格网单元包含关系判断
设格网单元A
的二进制编码M
,其长度为Len
(A
),设格网单元B
的二进制编码M
,其长度为Len
(B
),则给出如下定义:如果Len
(B
)<Len
(A
),则格网单元A
的剖分层级高于格网单元B
,即A
是更为精细的剖分格网单元,如果格网单元A
的编码前Len
(B
)位与格网单元B
的编码完全一致,称格网单元B
包含格网单元A
,即B
⊃A
。1.4 格网单元邻域定义
在各类空间关系之中,邻近关系是最重要的一类。格网单元的领域可以分为两种,一种是边相邻,称“边邻域”,因为在平面中一个格网单元都有四个边邻域,所以又称为四邻域(三角形形则是三邻域);另一种是角对角的邻域,称“角邻域”。这样任一格网单元的领域都有8个(三角形则有6个)邻域,称八邻域(三角形则称六邻域)。
1.5 空域四维时空框架定义
空域四维时空框架包含空域的平面格网系统、高度上下限及分层编码、时间离散间隔及编码等,是适应空中交通宏观的空中交通流量、大尺度空间复杂空中交通群体动力学、战场空域使用高动态性及安全态势高时变性管理等需求,建立的一种解决分析问题的基础技术框架。
空域四维时空框架示意图如图1所示,该框架是在空域平面格网系统基础上,增加了空域垂直方向的高度划分及格网单元的时间属性,用于计算机的信息空间内,对空域对象、空中运动对象的时空位置关系等进行建模,为开展基于空域的空中交通计算奠定基础。基于格网单元的三元组数组 结 构G
(Index
,Time
,Property
),用 于 组 织 空 中交通运行的各类数据,其中Index
为格网单元空间编码,Time
为时间戳,Property
为属性集合。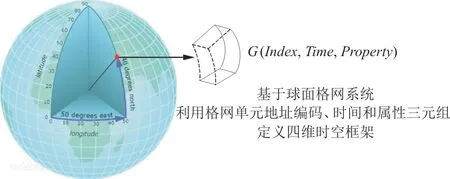
图1 空域四维时空框架的虚拟结构Fig.1 Virtual structure of four-dimensional space-time frame in airspace
2 空域网格化方法
空域格网单元剖分,其核心目标是分析空中交通管理结构、空中交通流量结构及空域配置结构、空中交通运行数据集等时间属性特征和空间属性特征,包括空中交通的空间尺度、时间范围、运动特性、飞行冲突、空域容量、安全等级、航空效率及管制负荷、空域复杂度等,根据此情况开展空中交通管理的空域格网单元剖分,确定格网单元的空间和时间精度,分析格网单元对应的索引性能、空中交通演化态势计算等,从而实现把连续空中交通空域离散成为多级格网单元系统,形成统一的时空描述方法,即空中交通管理的四维时空框架,对应的研究主体如图2所示。
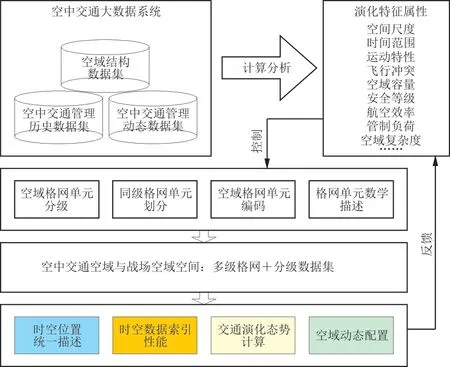
图2 空域格网剖分研究的主体框架结构Fig.2 Main frame structure of the airspace grid division research
空域格网剖分实际上是要建立一种全新的空中交通管理与空域管制的四维时空框架,具体如图3所示,核心实现将物理空间通过空域规则剖分后,利用矩阵空间管理空中交通的空间几何结构和空域结构,利用空域剖分建立的唯一全球地址码,建立空中交通和空域管制的时空大数据库,管理和监视空中安全态势、容量态势及空中运动演化态势,为开展管理控制空中交通提供决策的数据计算方法等。
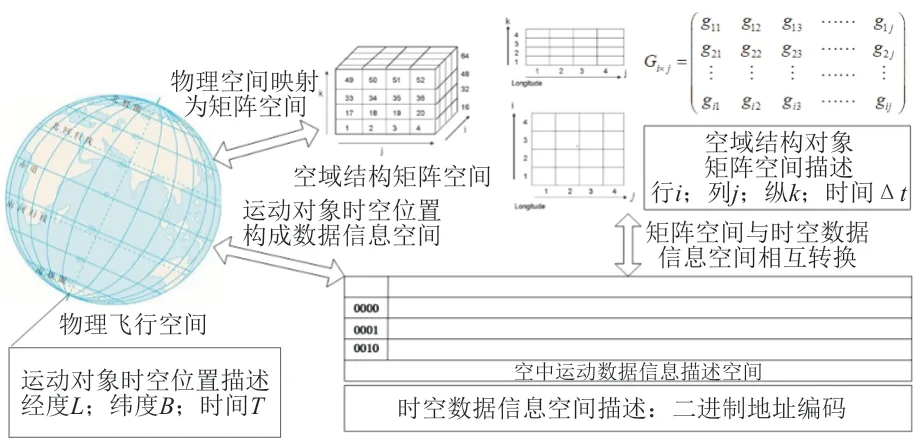
图3 空域格网划分核心内容Fig.3 Core content of airspace grid division
空域平面格网模型是空域空间网格化的基础,空域三维空间格网模型基于空中交通运行规则形成空域高度维度的划分方法,并与空域平面格网模型相结合构成三维空间格网模型。
2.1 空域平面格网模型
空域格网剖分实际上是对航空器飞行的地理空间划分,由于传统的地理空间信息组织多采用平面投影模型,即通过把地球的球面投影到平面上,从而建立球面空间与平面空间的一一映射关系。从球面到平面的投影过程不可避免地会产生形变,但空中交通是大尺度空间的飞行,在全球化的今天,跨国和跨洲际飞行已成为航空的重点组成,当空中交通区域拓展到全球范围,投影产生的形变就变得不可忽视。为此美欧国家和地区提出了全球离散格网系统(Discrete Global Grid Sys‐tem,简称DGGS),是一种具有全球无缝衔接和层次递归特性的格网框架,通过对球面进行无限递归细分拟合地球表面,避免了平面投影产生的各种形变及数据裂缝的问题。不同层次的格网单元除包含位置信息外,还记录比例尺和精度信息,每个格网单元具有全球唯一的编码信息,采用地址编码代替地理坐标进行操作,可解决传统投影模型不适用全球范围空间组织建模的问题。目前构建全球平面格网主要方法有经纬格网、正多面体格网和自适应格网三类。
2.1.1 经纬格网
球面经纬格网是最为简单的一种球面格网,研究应用也比较多,其以一定的纬度和经度间隔划分地球表面,可视为等经纬网格也可视为变经纬网格。等经纬网格是指由按固定间隔交织于球面的经线和纬度组成的网格单元。如美国国家航空航天局发布的开源软件(World Wind),就是采用等经纬全球剖分的典型系统,但是该格网单元的形变从赤道开始随着维度增大而变大,至两极退化为三角形。为了使每个格网单元的面积近似相等或控制在可接受范围,在等经纬格网基础上发展变经纬格网,如目前SkyLine、GoogleEarth等软件,按照等圆柱投影面,并以一定的经纬间距进行剖分,以格网单元的四个角所在的经纬度为地理索引。
2.1.2 正多面体格网
为有效表达全球多尺度空间并满足不同应用的需求,美欧国家和地区开发了基于规则多面体的全球网格模型,可以在球形表面上投影以产生具有相同形状的球形多边形且顶点在多边形有5种,被称为理想多面体。
递归剖分的主要目的是构建具有多分辨率格网,通常使用三角形,菱形或六边形。正八面体和正十二面体均由三角形网格构成,常采用四分和九分进行球面三角剖分。与经纬格网相比,正多面体格网具有多层次、多分辨率及格网大小近似等特点,使全球空间数据不受投影形变影响,更适于球面空间的数据建模与编码。
2.1.3 自适应格网
经纬格网、正多面体格网都是基于经纬度进行球面剖分,而自适应格网则是基于球面实体要素,以其某种特征进行剖分。基于Voronoi剖分的自适应格网具有更大灵活性,但递归步骤相当困难,对需要不同分辨率的应用非常不利。
针对全球统一标识需要,美军建立了空间格网参考系统(Military Grid Reference System,简称MGRS),如图4所示,即在美国军用地图上,除去经纬网之外,加绘相互垂直且间隔一定的方格网。
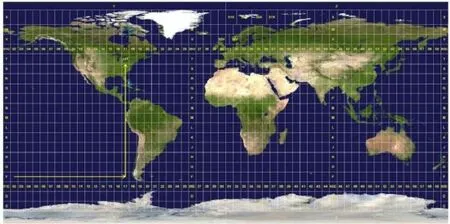
图4 美军空间格网参考系统Fig.4 Space grid reference system of U.S.military
MGRS在南纬80°至北纬84°之间,按照经差6°从经度180°开始由西向东将全球分成60个投影带(北京处于第50带),以1~60编号,每一带各自采用UTM投影,中央经线上长度比为0.999 6,以中央经线与赤道作为坐标轴,交点为原点,为避免坐标出现负值,将坐标纵轴西移500 km,在南半球将横轴南移10 000 km;纬差按照8°从南纬80°起划分,字母顺序以C~X标识。MGRS在两极地区采用通用极球面投影,即地球面为椭球面的等角正方位的投影。平面与地球的南北极在某一纬度相割,中央经线、极点分别为投影坐标系纵轴与原点,极点长度比0.994,割线纬线纬度大约为81°07′。为避免坐标出现负值,UPS投影坐标纵轴西移2 000 km,坐标横轴南移2 000 km。
2.2 空域空间格网模型
2.2.1 基于飞行高度层划分的空域空间格网模型
采用基于空中交通运行规则的高度划分建立空域空间格网模型,其主要考虑原因如下:一是从空中交通的巡航阶段看,其垂直飞行高度基于飞行高度层进行安排,并在这个高度上进行长距离的飞行,从而使得空域空间格网在垂直方向上与平面方向上难以建立统一的划分基准。二是空中交通飞行的巡航高度基准使用标准大气气压基准(在标准大气条件下海平面的气压,其值为101 325 Pa或760 mm汞柱)的高度;机场周边低空飞行一般采用修正海平面气压基准(将观测到的场面气压,按照标准大气压条件修正到平均海平面的气压)的高度;军事飞行有时在机场周边低空飞行采用场面气压基准,即航空器着陆区域最高点的气压;随着卫星导航技术的发展,高度定位的精确度和完好性越来越好,其测量高度基准是海平面。由于多种气压高度基准的存在,难以在空域空间格网模型的垂直方向上进行统一。三是实际空域管理使用中,主要通过设置空域的高度上下限,来建立空域的垂直方向的界面划分和使用控制,并且这种划分具有大空间尺度的一致性应用要求,从而难以对空域在高度方向进行精细的二等分划分。
2.2.2 将高度作为属性描述的空域空间格网模型
空域空间格网剖分建立在空域的平面格网系统基础上,按照空中交通飞行高度层对地球表面空间向上进行拓展,建立垂直方向的划分,如图5所示。
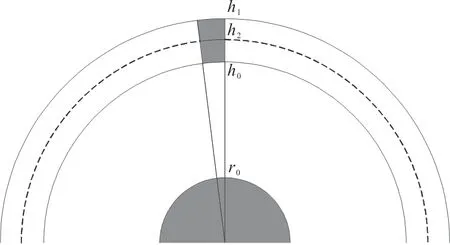
图5 空域空间垂直方向格网Fig.5 Vertical grid of airspace
根据惯例,对空中交通空域按照飞行高度的上下限建立其对应的描述方法。结合图1的描述,对于G
(Index
,Time
,Property
)三元组来说,可以在Property
属性域中管理空域空间格网的高度参数(上 限高H
=h
、下限高H
=h
、中间高H
=h
,h
=h
+(h
-h
)/2)。2.2.3 基于固定飞行高度层的空域空间格网模型
空域的空间格网是在空域平面格网系统基础上,增加了垂直方向的高度层分割,构成了三维空间的格网系统,又把这种三维格网系统称为“晶格”系统,如图6所示。
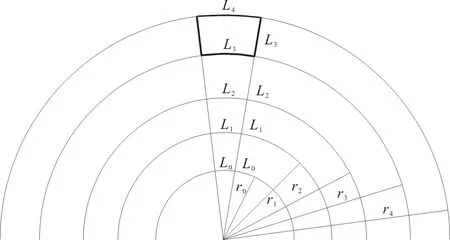
图6 空域空间格网剖分示意结构Fig.6 Schematic structure of space grid division
由于空域剖分单元都投影到球面,剖分单元每个边长l
都对应球面上的一个大圆弧或小圆弧,由于地球是一个椭圆,在垂直高度方向上的距离差Δr
,可以得到剖分单元的上下边边长l
及上下边边长差Δl
:l
=r
×θ
,Δl
=Δr
×θ
。由于空中交通巡航阶段飞行通常采用基于飞行高度层划分,可以在空域平面格网系统基础上,独立开展空域垂直方向的一维高度剖分,即按高度对空域进行空间圈层划分。设定“高高空空域”范围12 800~30 500 m;“高空空域”范围7 950~12 800 m;“中高空空域”范围3 450~7 950 m;“中低空空域”范围1 050~3 450 m;“低空空域”范围1 050 m以下。按照不同种类空域范围,共分成5个圈层,分别基于同一地理经纬线进行空域圈层划分,编号01H-05H(十六进制),如图7所示。
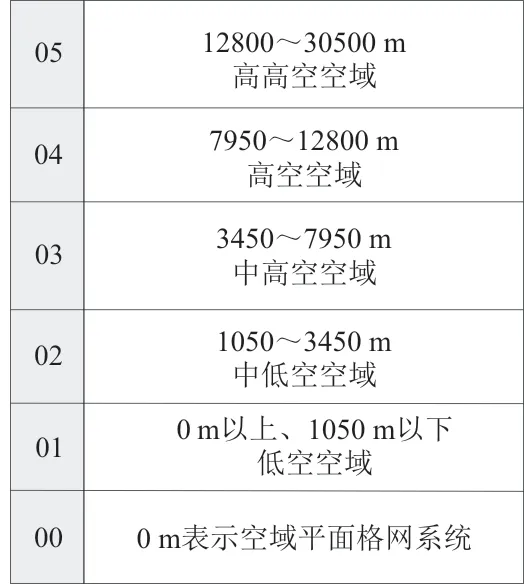
图7 空域圈层划分Fig.7 Division of space layer
3 空域网格化在空管中的应用
当前空域与空中交通流量管理的基础性原理方法,基本上都是建立在空域离散数字化建模基础上,并取得了系列进展和应用效果,具体体现如表1所示。
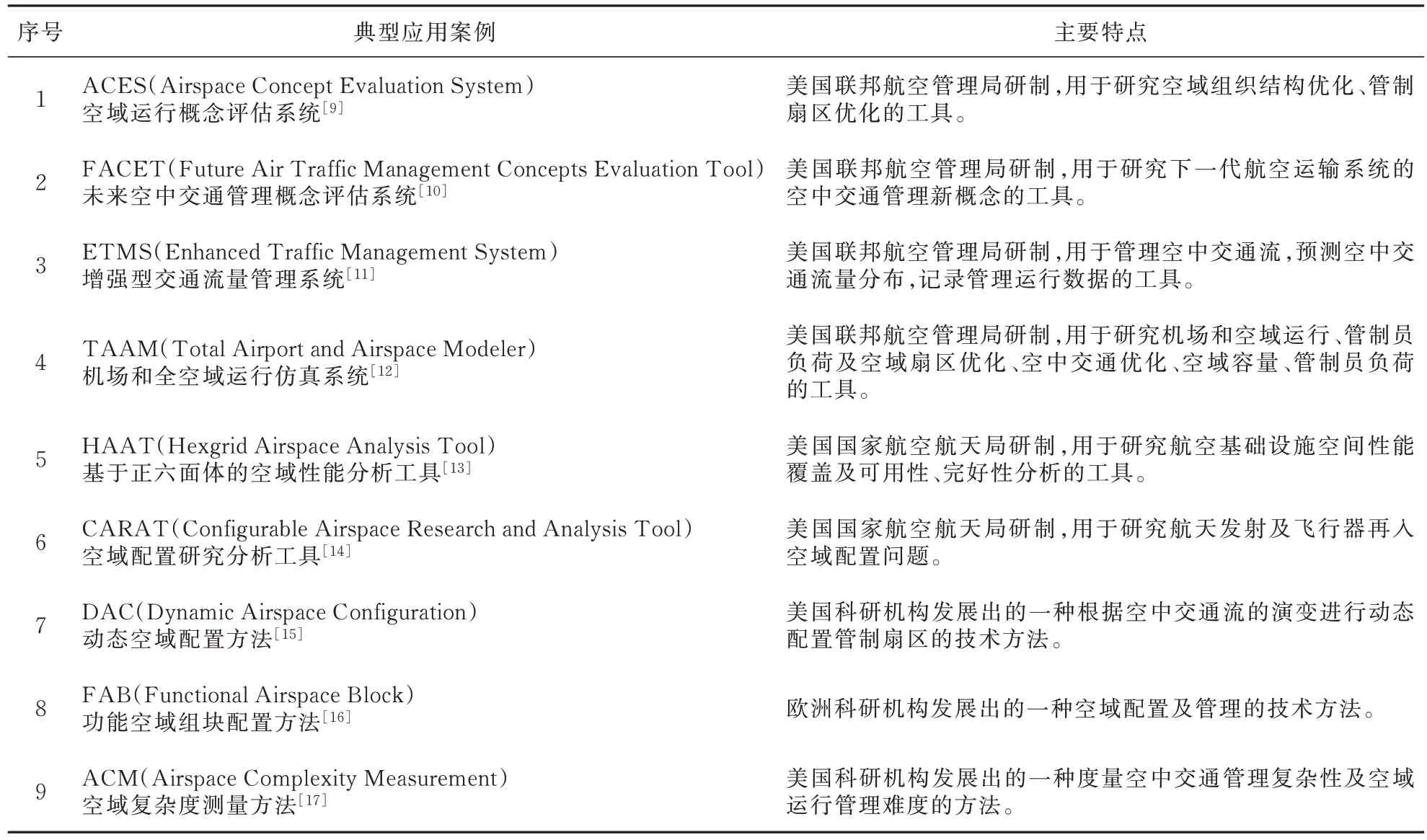
表1 空域离散数字化建模及典型应用Table 1 Spatial discrete digital modeling and typical applications
表1主要涉及空域数字化建模的工具和技术方法,还有其他的一些研究,如气象领域基于地理空间格网单元管理各类数据,划分天气影响区域及演化趋势概率等。空域网格化方法主要应用于航迹规划、空中交通飞行冲突探测与解脱、动态空域配置及功能空域构建等研究方向。
3.1 航迹规划
网格化处理的方法应用于航迹规划可以减少计算,加快最优航迹规划。空域网格化在航迹规划中的应用主要是低空空域中无人机、飞行器的航迹规划,研究人员提出将空域构建成网格单元,采用启发式算法将航迹规划问题转化为路径最优问题,也有研究者将空域网格化用于不规则的限制性空域的表达,还有研究者将空域网格化应用于大量航迹的存储应用之中。
目前在低空空域的航迹规划中常用方法是将空域进行三维网格化处理,采用启发式算法进行无人机航迹路径优化规划。2011年,K.Kaufik等在对无人飞行器的路径规划问题,采用改进的滚动时域三维空间A算法,将空间中的位置看作节点用坐标系进行表示,通过探测到周围节点的代价最小进行选择,得到最优的无人飞行器路径;同年,江磊针对飞行器航迹规划问题,提出了基于航迹片段的航迹规划方法,将规划空间划分成便于数据存储和管理的网格,预先规划出多条可飞的航迹片段,在进行具体的航迹规划时,选择合适的航迹片段组合,生成满足约束条件的航迹;2014年,王磊等提出了基于三维空域网格节点的低空飞行航迹规划方法,将低空空域划分成空域网格,生成多个航迹节点,结合天气、地形、飞行规则和航空器性能等多种约束,使用改进的A算法规划单个航空器初始飞行计划轨迹;2016年,曾国奇等提出了网格概率地图法(Grid Prob‐abilistic Roadmap,简称GPRM),实现无人机多约束快速航路规划;2016年,王莉莉等采用了平面坐标网格化解决航迹规划问题,针对恶劣天气影响下航路非正常使用的情况,基于恶劣天气数值预报特征,采用网格法建立空域环境模型,在考虑空中交通规则和飞机性能的基础上,提出了一种基于改进蚁群算法的航迹规划方法;2018年,S.Yang等提出了一种使用网格单元排序的历史轨迹数据集的存储方法,将大型时空数据空间划分为多个网格单元,并以两种不同的方式对这些网格单元进行排序,首先通过对查询模式不敏感的传统的空间填充曲线进行排序,然后采用基于图形的排序方法(Graph-based Ordering Approach,简称GBO),基于排序结果对轨迹进行聚类并储存到二级存储器,在进行查询时能实现快速查找;2019年,王瑛等提出了基于两阶段分析的改航路径网络规划方法,利用栅格法模拟改航环境,基于单一改航路径形成路径网络,考虑流量约束建立网络规划模型,采用基于改航点布局的求解策略并设计NSGA-Ⅲ算法进行求解。
部分研究者在航迹规划时考虑了限制性空域,2014年,An J X等将空域进行离散网格化,以空域中心为原点建立二维坐标系,考虑将禁区转化为规则的几何图形,基于坐标点进行航路规划,避开禁区找到最优的路径;2016年,Wang Shi‐jin等在建立航路网络时将航路网络空域划分成规则均匀的网格空域,将禁区、限制区和危险区转化为规则网格区域,提出一种自适应蚁群算法,实现空域网格环境下的航迹规划。
在气象网格的划分方面,二进制网格(GRIB)数据是国际民用航空组织(ICAO)和世界气象组织(WMO)提供的一种数值预报产品,GRIB数据得到的气象资料是按照经纬度网格分布的格点数据,网格有0.75°×0.75°、1.25°×1.25°等多种大小可选。2013年,武晓光等研究了GRIB数据及其在航迹预测中的应用;同年,Wei P等研究了三维气象网格,让飞机在不同的高层巡航,同时考虑到燃料燃烧、飞行水平操作等限制,采用高度层转换方法,当发现在高度层l
+1进行巡航产生的总体凝结尾频率指数(Contrail Frequency Index,简称CFI)比l
高度层少时,系统将l
高度层的所有飞机移至l
+1高度层,另一种网格转换方法,只移动当从l
转移到l
+1高度层能产生较少CFI的航空器,网格转换方法下的航迹移动更加准确,并有望提供更好的减少凝结尾及燃油消耗的效果。3.2 冲突探测
部分研究基于平面坐标网格化方法解决航路空域的航迹规划及冲突探测,采用三维空域网格化方法对战略阶段航路空域的冲突进行探测的研究较为丰富:1997年,B.Sridhar等给出了一种基于分类算法的战略飞行冲突探测算法,基于飞行冲突的发生一般总是存在于处于相邻区域的飞机之间这一事实,在水平面上将全空域离散化为各个格网单元,对每个格网单元编号,建立基于网格化的冲突探测算法;2005年,R.J.Matt研究了战略阶段的冲突探测,提出基于网格的随机冲突探测算法,用空间及时间四维网格来表示空域运行,计算航空器的4D航迹并将航空器对应到相应的时空网格中,通过对网格是否被占用可以对战略航迹冲突做出判断,不仅引入了确定性冲突探测算法,而且形成了考虑轨迹以及风暴单元预测不确定性效应的随机冲突探测算法,并提出可以将网格化空域方法推广应用于空中交通拥堵监控方面;2011年,S.Ruiz等提出一种基于空间数据结构的冲突探测算法,将空间划分成小正方体构成的网格空间,将航迹信息储存到网格中,通过对对应航迹点的时间范围内周围的航迹点识别,采用基于相关联空间数据结构以及基于时空数据结构的冲突探测方法实现快速冲突探测,较传统的取样成对比较冲突探测方法的探测速度更快;2014年,An J X等对航班航路与限制区之间的冲突进行探测,生成与限制区无冲突的飞行航路;2016年,顾俊伟在进行多航空器间飞行冲突探测时,提出基于4D网格的飞行冲突初筛算法,用一个四维的时空网格离散整个飞行空域,通过检查每个非空的相邻网格探测出潜在的飞行冲突,并提出网格大小的划分可能会影响安全间隔的判断,容易造成过多的虚假警报;2018年,Hao Siqi等结合时间地理学的思想,将冲突航迹的预测与解脱转换到4D路径点约束下的可达空间,提出一种新的基于航迹预测的多航空器预冲突探测与解脱的算法,为了在计算中更好地表示航迹点,基于网格化的思想将空域进行离散化处理,划分成三阶的立方体结构,并确定了临近点的个数,通过时空棱镜来表示飞行员意图的不确定性,通过对时空棱镜是否相交的判断来进行冲突探测;2019年,Han Yunxiang等提出了在给定的起始和目标位置下,在指定空域内寻找飞机最优飞行轨迹的问题,通过选择网格大小和空间边界,首先在模型构建中引入了现实约束条件,如转弯率和空间布局,然后采用顺序规划方法生成最优轨迹,并且设计一种最优飞行轨迹搜索方法,建立四维坐标系,坐标轴分别代表水平坐标、高度和真空速,这种方法表明多条航迹间的冲突解脱问题可以通过空间离散化来描述,所采取的方法是将三维空间数字化成节点网格;同年,J.J.Acevedo等将空域表示成四维网格,给定一组无人机预定4D飞行轨迹,将整个空域场景离散为4D网格,通过将轨迹中的每个路径点填充进适当的网格单元并检查相邻网格单元来探测冲突,该方法可以很好的扩展用于大量的无人机以及每条轨迹上的航路点;2020年,Zhang Z等提出了基于经典电磁理论的自由飞行下冲突预测及空域安全评估模型,空域内自由飞行的航班被认为是带电粒子,通过将空域划分为基本网格,利用网格顶点的静电势来预测轨迹对之间的冲突,此外,从整个空域的冲突来看,网格顶点电位的平均值可以解释为安全水平,即整个空域内自由航空器之间的冲突数。
部分研究者针对低空空域冲突探测进行了研究,2014年,王磊等将低空空域网格化,生成单个航班初始优化航迹,并在此基础上分别通过调整航空器的起飞时刻和改变航空器飞行轨迹实现战略阶段多航空器的无冲突航迹规划;2018年,Tang J等为了解决低空空域中小型固定翼航空器的冲突问题,将航空器的航路点记录为具有相应时间标记的三维空间信息,为了判断两架航空器是否会有冲突,应当判断两条航迹是否会在同一个时间窗口经过同一个空域网格;2019年,Miao S等提出了一种基于多层次网格时空的低空飞行冲突检测算法,首先,建立了基于空域的时空细分编码模型,该模型描述了轨迹、低空障碍物或危险区域的几何形状,并使用网格代码识别网格,然后设计网格的数据库表结构并创建网格数据库,最后建立了多级网格时空索引,设计了查询优化方案,并对网格数据库中的飞行冲突检测结果进行了检验。
基于空域网格化的冲突探测主要采用网格单元中航空器的占用情况并结合高效的数据存储结构来判断冲突,能有效提高冲突探测的速度。
3.3 考虑交通流特性的空域规划及空域配置
空域格网化为优化空域组织结构提供了一种途径,这种途径源于利用基本空域体可以动态配置与重构现实所需的空中交通结构,从而实现空域规划及动态配置。一般来说,终端区管制扇区的划分依照管制工作负荷均等的原则进行,高空扇区的划分需解决空域碎片化的问题。目前其核心研究方法,则是根据空域配置目标要求,建立混合整数规划模型,研究传统最优化方法或现代优化方法,如遗传算法、粒子群算法、模拟退火算法等进行求解,或者按照既定规则设计启发式算法,进行空中交通航路网的结构优化、飞行空域或限制性空域的结构优化、管制扇区的动态配置等。
网格化方法在空域规划及空域配置方面的应用研究包括航路网络规划及空域划设,基于网格化方法的终端区扇区配置和高空扇区配置。
在航路网络规划方面,网格化方法主要用于基于无扇区空中交通管理运行概念下的全局航路网络规划,2004年,T.Riviere等研究了欧洲航路网络规划,以经纬网格覆盖整个欧洲,通过选择、评估、判断进行航路网络规划,并于次年改进算法求解性能。空域划设方面,从下向上的“网格”生长算法是典型的空域划设方法,但是空域划设生长算法也存在网格选择任意、不能与地图相匹配、信息素收集困难且需专门设计边缘平滑算法等问题,2019年,文秘等针对空域划设生长算法现存问题提出了基于弧度制的全球网格剖分,能极大提升空域划设效率,从而改进空域划设生长算法。
基于网格化方法的终端区扇区配置相关研究包括:1998年,W.S.Pawlak等总结了利用有限元法与基于遗传算法的扇区配置方法,提出了基于格网单元构建管制扇区的一种配置方法,实现根据空中交通密度进行扇区划分;2007年,S.A.Martinez等介绍了一种将空域划分为更小区域进行管理的方法,由于管制员的监视和提供间隔保持服务的能力是有限度的,对空服务的通信频率点也是有限度的,这样一个空域内的飞行总量必须控制在一定限制以内,才能保持空域容量和空中交通流量的匹配,为了满足空中交通需要,发展出了动态空域配置方法,以根据空中交通流量的变化调整空域边界及构型,满足空中交通运行需求;2009年,R.Kicinger等研究了一种动态空域配置方法,通过重组管制扇区边界来满足空中交通运行需求,提升空中交通容量和效率,按照飞行高度层和经纬网线,将空域按照垂直高度和平面区域进行等间距划分,以方便管制员开展空中交通管制与飞行实时调配;2014年,J.Wei等提出了终端空域的水平维度可以被划分为一个平面网格,同时,真实的交通流和预期飞行轨迹被投影到水平网格中,飞行轨迹经过的网格单元被识别出来,并在图中着色,显示交通的离散水平分布,之后,每个网格单元内飞行段的最大高度和最小高度分别定义为网格的最高值和最低值;2017年,戴福青等将终端区空域划分为离散的矩形栅格单元,以交通量为依据建立扇区优化模型。
基于网格化方法的高空空域扇区配置相关研究包括:2008年,S.Alam等提出一种空中交通运行及管理仿真系统,在进行空域建模时将空域离散化为等大小的超矩形单元格,以大地坐标系为基准以及高度和时间信息,提出4D网格化的模拟器,模拟实现端对端空域运行和传统空中交通导航程序,以及模拟自由飞行,模型中考虑大气和风的影响,可以进行精确的航迹预测;2009年,C.R.Brinton等提出了一种基于动态密度进行管制扇区切分的方法,其中采用了基于格网单元增加的扇区生成算法,将全美空域划分成1 n mile(1 n mile=1.852 km)尺寸的正方形格网单元,由于格网单元数据巨大,进行增量计算复杂,由此,可以在不同格网单元剖分层次上进行初次计算优化,再映射到更为精细的格网单元层次上,得出问题的求解结论;2012年,J.Stankūnas等对欧洲的空域结构进行分析,提出将被国界线切分的离散的空域进行重新建模,以空域块的方式进行管理,提出以结构化加权的矩形网格单元结构对离散化空域进行分析,利用层次聚类的方法确定网格单元的最优数量,充分考虑了交通流的特性实现空域建模,解决空域碎片化的问题;同年,V.Kon‐droška等针对欧洲空域碎片化的问题,提出用网格的方法进行数据处理,将空域划分成网格空间,根据飞行的次数对网格定义权重系数,然后通过聚类的方法,把空域分成空域块,使得在本区域内的航空器产生高效连续的水平飞行轨迹。
4 空域网格化及数字化研究重点及发展趋势
不管是目前正在深化发展的空中数字交通,还是今后的空中智慧交通,构建空域离散格网单元并建立数字化模型是基础,其需要研究的重点有三方面。
(1)空域格网单元划分原则和方法,即解决如何实现连续空域离散成格网单元的问题。空域格网单元作为空域管理的基本空域体单元,决定了不能简单地采用一般的地理格网单元划分方法,否则将不能使得基于空域格网单元组织的数据还保留空中交通系统特性。据此需要研究空域格网单元划分的原则方法,解决格网单元分类、划分依据及信息空间内的建模问题。
(2)空中交通大数据的空域格网单元索引管理,即如何通过空域格网单元建立空中交通大数据的时空索引的问题,这样可以高效利用空中交通历史大数据,开展数据分析和挖掘工作。据此需要研究采用什么样的样式来组织存储、调用数据,这是网络化空中交通数据组织研究的核心内容。
(3)空中交通历史数据挖掘分析技术,即如何从网络化管理的数据样本中,提取有用的空中交通管理信息,实现以提供准确的交通演化态势为目标的数据挖掘、搜索和快速决策。
总体上看,目前空域离散数字化建模及应用,呈现出如下四个方面的研究趋势。
(1)空域数字化建模技术,作为把物理飞行空间映射到信息空间中的一种方法,为各类优化计算方法在空域与空中交通流量管理中的应用奠定了基础,已成为现代空域管理技术研究的核心内容。从美欧国家和地区科研机构形成的各类空域与空中交通流量管理工具、系统平台及新技术构想等情况看,已建立了拉格朗日格网(Air Traffic Monotonic Lagrangian Grid,简称ATMLG)单元、地理空间格网单元(如基于地理坐标系的经纬度划分格网单元、基于空间笛卡尔直角坐标系的正方形格网单元、基于局部极坐标系的圆周格网单元等),这些格网单元依照研究空域与空中交通流量协同管理的不同视角,建立起其应用概念、范围及模式,其基本思想都是基于将连续空域进行离散化成组分单元或基本空域体,在此基础上,形成了空间索引标识,该标识同地理空间位置和定位关联,成为空中运动对象的空间地理坐标表征的一种替代。如果对基本空域体进行编码,则这个编码同地理位置坐标建立起了一一对应的关系,为简化对空域结构对象描述、空中交通流量的宏观抽象表征等提供了全新的思路,尤其是利用空域格网单元编码索引,进行空中交通历史数据、仿真数据的组织管理,成为开展空域复杂度监测、分析空中交通密度分布及拥堵演化、评估空中交通安全性等所需的重要基础数据组织架构,并逐渐发展成为空中交通管理的时空大数据分析架构。
(2)空域格网单元既是对空中运动对象位置的一种描述,又是一种全域空间离散成局域的处理思路,为开展空中交通飞行战略冲突探测和解脱提供了一种全新的基础时空架构,据此利用空域格网单元的位置表征,开展空中交通位置计算及飞行冲突探测,并可以建立一种简化计算方法,提高计算效率,实现对大尺度空间高密集飞行活动的冲突管理。
(3)空域格网化为优化空域组织结构提供了一种途径,这种途径源于利用基本空域体可以动态配置与重构现实所需的空中交通结构,实现空域动态配置。目前其核心研究方法,则是根据空域配置目标要求,建立混合整数规划模型,研究传统的最优化方法或现代优化方法,如采用遗传算法、粒子群算法、模拟退火算法等进行模型求解,或者研究一种启发式算法,按照既定规则进行空域格网单元动态配置,实现管制扇区的重组优化、空中交通航路网的结构优化、飞行空域或限制性空域的结构优化等。
(4)空域格网单元的离散化同气象格网单元的离散化存在共通性,尤其是气象格网单元已成为处理大范围天气对空中交通影响的基础性架构,因此当前需要研究这两类格网单元的相互转换和兼容问题,实现两者的统一,从而在空中交通管理领域,建立全新的底层时空组织架构,据此发展一套全新的计算空域理论方法,即空域数值计算理论方法、空中数字交通理论方法。
从当前新一轮信息技术发展重点趋势看,人工智能技术将被广泛应用,今后发展智能空中交通管理系统(Intelligent Air Traffic ManagementSystem,简称IATM)成为一种主流趋势,实现空中交通数字化、信息化和智能化已成为一种得到广泛共识的思路。空域离散数字化建模,则是一种对空域和空中交通流量的系统划分和组织形式,目的则是通过系统的格网化来降低空中交通运行的复杂度,从而提高空域容量、空中交通运行效率和安全性,改善当前空中交通抗扰动能力。不管是空中交通系统,还是战场空域管制系统,其本身就是一个复杂的大系统,空中交通飞行众多、航空器类型异构、航空基础设施复杂,且各组分系统之间联系紧密,构成了一种网络。航空器飞行具有智能性,能够对周围环境作出反应,具有自组织、自适应、自驱动能力;空中交通飞行和航路航线网络、管制扇区之间存在非线性相互作用,同时空中交通还存在层次性和整体性特性,往往形成容流失衡状况,使得系统整体处于动态非平衡状态;空中交通需求和空域使用要求存在随机性,参与空中交通管理的多主体之间存在信息不对称性等。这些都迫切需要将复杂的空中交通管理进行网络解耦,实现管理的定量化和精确化。
从当前技术发展看,研究基于空域格网单元的空中交通划分与多层次、多尺度级联控制方法,将成为今后一个重要的研究领域。主要体现在,不太可能将大尺度空中交通或战场空域系统看作一个整体,不太可能采用一种模式解决所有的空域飞行问题,如何在相对较小的单元内去解决局部空中交通问题,在相对较高层次进行策略协同,解决广域空中交通问题,成为空域格网单元调度控制的重要内容;如何在复杂的空中交通系统中进行合理聚类、分类,并以一种新的整体形态存在于全局系统之中,从而实现对复杂关联的空中交通或空域的管控,进行降维计算处理,也成为一个重要的研究点;此外随着大数据技术飞速发展,空中交通海量历史轨迹数据的采集、传输、分析技术逐步成熟,将飞机轨迹数据与划分的空域格网单元进行匹配,提取格网单元交通运行指数,通过挖掘数据对终端区、航路空中交通运行状态进行判别,以及基于数据驱动训练学习人工智能算法等也都是重要的研究点,这些支撑性研究都将为智能交通处理计算方法奠定基础。
5 结束语
空域网格化方法将广泛应用于空中交通管理各个研究领域,包括航迹规划、航迹冲突探测、空域规划及空域配置等,空域网格化方法将与大数据技术实现更多对接,在精细化、数字化方面获得不断发展,空域网格化在应用于空管各研究领域中也将与相关领域技术产生更多交互,相互促进,为未来更为自由灵活的新一代空管概念的实现提供技术支撑。
猜你喜欢
航空学报(2022年9期)2022-10-14
舰船科学技术(2022年11期)2022-07-15
舰船科学技术(2022年10期)2022-06-17
科学与生活(2021年21期)2021-11-10
环球时报(2021-02-01)2021-02-01
科技视界(2020年8期)2020-05-18
科学与财富(2016年27期)2017-03-24
商(2016年28期)2016-10-27
珠江水运(2015年11期)2015-07-24