
数字图像重建的三维图像自动化视觉传达优化系统
2021-08-29 08:33:36刘润红
制造业自动化 2021年8期
刘润红
(郑州师范学院,郑州 450000)
0 引言
图像重建技术可在数字处理手段的支持下,通过测量物体外部数据的方式,获得与该三维物体相关的物理形状信息,其大体执行环节由投影重建、形状恢复、视觉重建、激光测距等多个步骤共同组成。应用扫描激光对物体景观进行测距处理时,首先会获得一系列的三维数据,然后经过多次坐标换算,直至准确恢复该物体的所有三维形状数值。大多数情况下,图像重建技术的测距能力极为准确,若采用固定激光源,则可令物体处于转动状态,并在多次升降操作后,录取各个剖面中所包含的三维数据,以用于三维图像的后续重建;若采用移动光源,则可将物体固定在一个锥形区域内,并在前视扫描仪的作用下,获得多组三维数据参量[1]。
在自动化视觉传达领域中,数字图像三维影像感观重建总是受到多个建模条件的限制影响,一方面会导致重建后图像出现不完整或破损的情况,另一方面也会导致图像节点的分辨率水平持续下降。传统视觉传达系统借助高斯滤波模型提取关键的影像特征点,再利用深度摄像机与图像处理器完成对三维数字影像的重建与维护。然而此系统的重建能力有限,并不能实现对图像节点分辨率水平的有效提升。为解决此问题,设计基于数字图像重建的三维图像自动化视觉传达优化系统,在红外实感摄像头、图像传感器等多个硬件设备结构体的支持下,对三维数字图像的分辨率水平进行初步估计,再以此为基础,计算时域松弛因子的具体数值结果。
1 数字图像重建的三维去雾处理
数字图像重建的三维去雾处理由图像分辨率估计、重建节点迭代修正、时域松弛因子计算三个步骤共同组成,具体操作方法如下。
1.1 三维数字图像的分辨率估计
三维数字图像重建理论指出分辨率初始节点的选择应是任意的,在实际成像空间中,所有元素都可被视为估算初始点。实际操作过程中,为了简便且快捷地计算得出三维数字图像的分辨率数值,通常采取单独放大某一特定帧分辨率图像的处理方法,并将该物理帧节点定义为三维数字图像的参考帧,在后续视觉处理环节中,参考帧可用来构造分辨率水平更高的三维数字图像[2]。在自动化视觉传达系统中,重建所有数字图像都应以参考帧条件作为基础。规定在保持原始序列形式的三维图像中,参考帧节点的分辨率水平能够反映重建后图像的分辨率水平均值。设x1、x2分别代表两个不同的参考帧节点横坐标,y1、y2分别代表两个不同的参考帧节点纵坐标,在上述指标参量值对应匹配为节点(x1,x2)、节点(x2,y2)的情况下,可将三维数字图像的分辨率估计结果表示为:
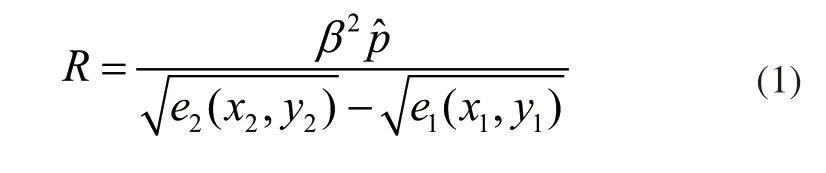
其中,e1、e2分别代表两个不同的三维节点判别系数,β代表重建后三维图像的成像条件,pˆ代表三维图像的成像特征值。
1.2 重建节点的迭代修正
数字图像重建节点迭代修正的另一个核心问题就是完成基于视觉传达的图像信息搜索,该项操作是指如何在指定区域内,选取多个与迭代修正行为相关的节点匹配位置。搜索策略的应用能够较好解决三维数字图像分辨率水平过低的问题,并可以此为基础,实现对自动化节点的按需分配。在已知三维数字图像分辨率估计结果的基础上,重建节点的迭代修正就是针对成像空间进行连续性约束投影的处理过程[3]。因此,数字图像重建节点迭代修正处理应以构造信息参考集为首要目标,在后续处理过程中,可将已有先验约束信息填充到原始参考集合中,从而完成对节点参量结果的修正与维护处理。设tmax代表最大的三维图像信息搜索权限值,tmin代表最小的三维图像信息搜索权限值,联立式(1),可将数字图像重建节点的迭代修正结果表示为:

式中,λ为重建后数字图像的三维区域划分系数,f为基于视觉传达的自动化节点分配条件,I1、I2为两个不同的自动化节点位移矢量值,为I1与I2系数的均值结果。
1.3 时域松弛因子计算
三维数字图像重建质量受到视觉传达节点运动估计误差等多个物理条件的共同影响,其他因素诸如随机噪声值、图像节点偏移等也会导致重建后图像的质量水平严重下降,因此仅参考重建节点的迭代修正结果是远远不够的。基于此提出时域松弛因子的计算思想,一般情况下,当参考帧距离观测帧较远时,重建后三维数字图像的时域松弛因子数值相对较小,即参考帧与观测帧的差异值水平较小;当参考帧距离观测帧较近时,重建后三维数字图像的时域松弛因子数值相对较大,即参考帧与观测帧的差异值水平较大[4]。相对于其他应用思想而言,时域松弛因子可为三维数字图像重建提供更多的参考帧信息参量,从而实现对自动化视觉传达系统的优化处理。设s1、s2分别代表两个不同的参考帧定义项,联立式(2),可将时域松弛因子计算结果表示为:

其中,A代表参考帧节点与观测帧节点间的距离系数,q0代表观测帧节点定义项,代表基于观测帧节点的三维图像重建指征。
2 三维图像自动化视觉传达系统的设计及优化
按照数字图像重建的三维去雾处理需求,按需连接红外实感摄像头、图像传感器与视觉传达处理设备,实现三维图像自动化视觉传达系统的设计及优化。
2.1 红外实感摄像头
红外实感摄像头负责三维图像的采集,可在同一时间点获取多个连续的视觉影像,并可按照图像中重建节点间色彩数据的配比关系,对原始数据图像进行重建与融合处理。在原有的自动化视觉传达系统中,深度摄像机只能采集到黑白或单色的图像信息,且这些信息参量也只能短暂存储于系统数据库主机之中[5]。为从根本上减轻数据库主机的存储压力,自动化视觉传达优化系统采用红外实感摄像头对三维图像信息进行采集,一方面可按照数据参量间的色彩配比关系,安排其重建处理行为的执行方向,另一方面也可通过红外测定的方式,判断相关节点处的数字图像分辨率水平,从而使得修正后的迭代系数能够更好应用于三维图像节点重建的处理过程中。
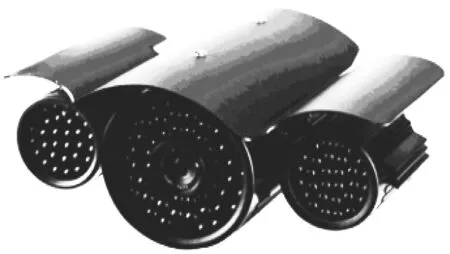
图1 红外实感摄像头示意图
2.2 图像传感器
三维图像传感器可用于稳定多个红外实感摄像头之间的物理连接关系,在进行数字图像的深度拍摄时,基础传感模块与影像传感器主机同步开启连接状态,可在维持三维数字图像原始分辨率水平的同时,实现对自动化视觉传达优化系统执行环境的有效维护。三维传感模块能够准确记录重建后图像的时域松弛因子数值,并可遵照重建节点的迭代修正结果,探测现有处理图像的平均分辨率水平。影像传感器则具备较强的辅助执行能力,可对红外实感摄像头所采集到的连续图像信息进行二次处理,并从中筛选、剔除非必要的颜色信息参量,从而使得重建后数字图像具备更高的视觉传达能力。
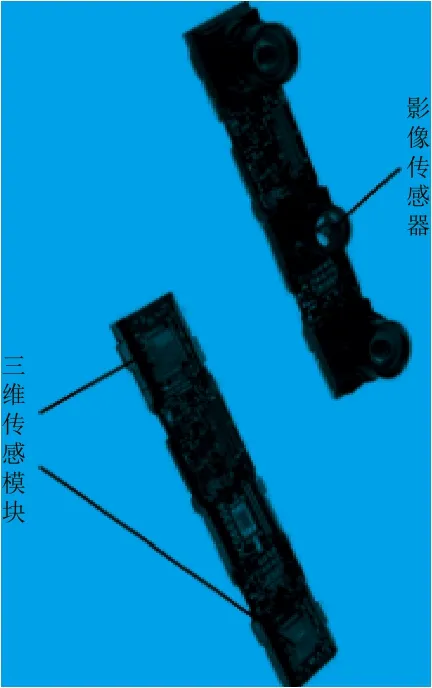
图2 三维图像传感器示意图
2.3 视觉传达处理设备
视觉传达处理设备作为数字图像重建处理的关键执行元件,可在红外实感摄像头、图像传感器两类硬件设备结构体的支持下,对三维图像节点的分辨率水平进行检测与跟踪,从而使得系统显示屏幕中图像信息参量的存在形式得以丰富。传统视觉传达系统中只存在JPG一种格式的数字图像,随视觉传达指令的不断执行,原图像的分辨率水平会不断下降,直至最终输出图像的清晰度受到严重影响[6]。新型自动化视觉传达优化系统中增设了RCB格式的数字图像,这种图像信息在原始图像的基础上,针对三维节点分辨率水平较低的问题进行改进,不仅解决了红外实感摄像头在图像信息采集过程中可能出现的物理晃动问题,也可实现对图像信息文件的长期存储。
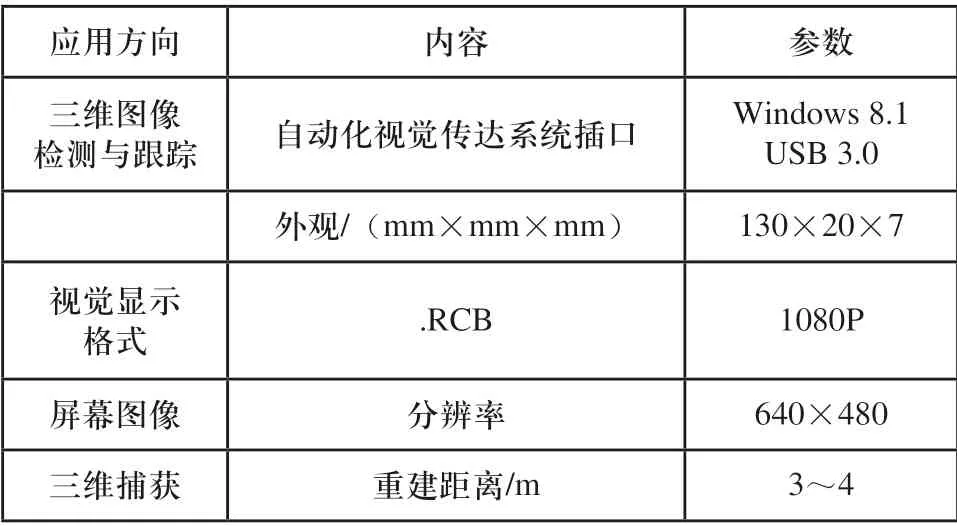
表1 视觉传达处理设备参数设定
3 系统实用能力测试
为验证数字图像重建三维图像自动化视觉传达优化系统的应用可行性,设定如下测试环节,通过对比重建后图像的平均分辨率水平,来判断实验组、对照组系统的实际应用能力,其中实验组主机平台搭载基于数字图像重建的三维图像自动化视觉传达优化系统,对照组主机平台搭载传统视觉传达系统。
遵循三维数字图像信息的提取结果,构建如图3所示重建测试平台,以3D制作设备、影像编辑工具、专业引擎元件作为实验基础,在C语言开发软件的支持下,采用多构架网络对三维图像数据信息进行传输处理,从而使其时效性及完整性得到有效保障。

图3 影像重建测试平台
表2记录了重建后三维数字图像的理想分辨率数值、实验组分辨率数值及对照组分辨率数值。

表2 分辨率数值对比
理想情况下,重建后三维数值图像的分辨率最小值为67.2dpi、最大值为67.5dpi,剩余记录数值则始终在该物理区间内来回波动变化。实验组重建后三维数值图像的分辨率最小值为57.6dpi、最大值为64.6dpi,与理想情况相比,其数值波动区间虽然明显增大、平均数值水平也出现了下降,但其实际记录数值已经在不断向着理想化数值结果靠近。对照组三维数值图像的分辨率最小值为34.0dpi、最大值为35.2dpi,与理想情况相比,其数值波动区间虽然没有明显变化,但其均值水平却出现了明显下降的变化趋势,也远不及实验组的数值记录结果。
QSI指标能够反映视觉传达系统所具备的图像去雾能力,通常情况下,QSI指标数值越大,视觉传达系统所具备的图像去雾能力也就越强。下表记录了实验组、对照组QSI指标数值的实际变化情况。
表3中,实验组QSI指标在前35min的实验时间内,一直维持不断上升的数值变化趋势,但中后期这种数值上升的变化幅度明显减小,从第40min开始,实验组QSI指标的数值变化趋势开始逐渐趋于稳定。对照组QSI指标在整个实验过程中,始终保持不断下降的数值变化趋势,但实验后期的下降幅度明显小于实验前期,全局最大数值结果达到了60.7%,与实验组最大值88.3%相比,下降了27.6%。
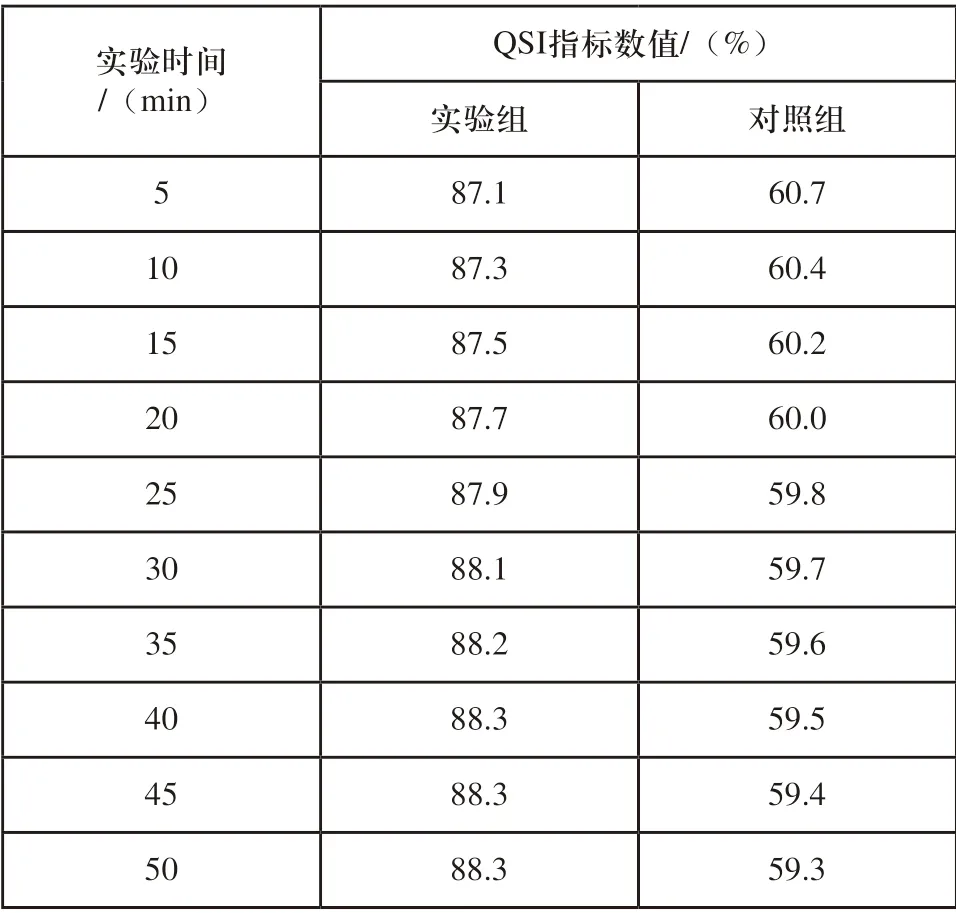
表3 QSI指标数值
总结上述所有数值记录结果可知,应用三维图像自动化视觉传达优化系统后,数值重建图像的分辨率数值水平得到了有效保障,且QSI指标数值也开始不断提升,能够较好地实现对待重建图像的去雾化处理。
4 结语
三维图像自动化视觉传达优化系统在传统视觉传达系统的基础上,针对重建后数字图像的分辨率数值进行初步估计,又联合重建节点的迭代修正结果,对时域松弛因子进行精准计算。由于红外实感摄像头、图像传感器等多个硬件设备结构体元件的接入,视觉传达处理设备可对各级数字图像信息进行同步处理与协调,一方面实现了对数字化图像的重建与处理,另一方面也可满足准确监测自动化节点处三维图像分辨率水平的实际应用需求。在三维重建思想的作用下,数字图像的复原与修复成为了可能,不仅能够弥补视觉传达思想在应用方面的不足之处,也可有效抑制图像起雾行为的出现。
猜你喜欢
当代陕西(2020年13期)2020-08-24 08:22:00
测控技术(2018年11期)2018-12-07 05:49:02
商情(2018年38期)2018-09-30 03:11:22
艺术品鉴证.中国艺术金融(2018年12期)2018-08-26 06:04:34
课程教育研究·学法教法研究(2018年21期)2018-08-10 10:29:48
都市家教·上半月(2017年10期)2017-11-07 19:24:21
系统工程与电子技术(2016年7期)2016-08-21 13:59:14
西北工业大学学报(2015年4期)2016-01-19 03:31:55
池州学院学报(2015年3期)2016-01-05 01:13:17
电测与仪表(2015年2期)2015-04-09 11:28:50
