
纯电动汽车复合电源再生制动控制策略的研究
2021-08-26 11:06王昕灿吕立亚潘道远
机械设计与制造 2021年8期
王昕灿,吕立亚,潘道远,陈 松
(1.江苏航运职业技术学院交通工程学院,江苏 南通 226010;2.南京林业大学汽车与交通工程学院,江苏 南京 210037;3.安徽工程大学机械与汽车工程学院,安徽 芜湖 241000)
1 引言
虽然锂离子电池因其高能量密度和高循环寿命等优点而在电动汽车领域得到了广泛应用,但距离高续航里程、充电速度快的高性能电池目标还有所差距。故充分利用动力系统的能量,提高能量利用率,是提升电动汽车续航里程的重要方式之一。电动汽车在制动时,电机可产生制动转矩并转成发电机对储能系统进行充电[1]。目前国内纯电动汽车应用的多数为单电源型再生制动系统,且控制策略一般采用固定比值分配的并联制动力分配策略或基于理想曲线的最佳感觉制动力分配策略,结构简单且再生制动回收率有限[2]。学者某团队在研究再生制动系统时,以飞轮电池作为储能系统,建立了由飞轮、调速电机、驱动电机、电磁离合器等其他部件组成的再生制动回收试验台架,完成了多种车速下的再生制动试验,将电机再生制动的能量回收至飞轮电池中,但试验过程未充分考虑路况、电池SOC(State of Charge,剩余电荷)等影响因素,控制策略有待完善。文献[3]和文献[4]中均利用模糊控制方法对再生制动控制策略进行了仿真研究,前者仅考虑车速和SOC影响因素,采用固定比值进行制动力分配,能量回收率有待提高;后者加入ECE制动法规线,增加模糊控制的输入量;两者均为考虑路面影响因素,在实车应用中得不到安全保证。
而较为典型的是最佳感觉再生制动控制策略及并联再生制动控制策略[5],前者尽可能使制动力按照理想I曲线进行分配,实际应用中难以严格按照曲线分配,与所设计的改进型控制策略相比,再生制动回收效果欠佳;后者按照固定比例进行制动力分配,缺乏驾驶感觉和制动效果。故在前人研究基础上,为进一步提高纯电动汽车电机再生制动回收率,提升能源利用率,增加电动汽车续航里程,对复合电源纯电动汽车再生制动控制策略展开研究。建立串并联可变结构复合电源储能系统,利用SVPWM调制方法控制电机三相整流器的转矩输出,全面考虑能源SOC、车速、制动强度对电机制动转矩的影响,并建立路面特征值数学模型识别路面状态,建立了不同附着系数下以f线组、r线组、理想I曲线和ECE法规线为制动力分配基础的再生制动力控制策略。利用MATLAB∕SIMULINK仿真软件建立复合电源和再生制动控制系统仿真模型,嵌入ADVISOR纯电动汽车整车模型,进行不同制动强度下的再生制动过程仿真,并选取CYC_ECE和CYC_UDDS两种道路循环工况,对嵌入的控制策略模型进行整车仿真,与AD⁃VISOR原有模型的仿真结果进行对比分析。仿真结果表明,所设计的改进型再生制动控制策略能量回收效果更佳,能有效提高1续驶里程。
2 复合电源结构设计
针对单一串联或并联型双能源储能系统存在回收能量损耗率较高等问题,提出一种串、并联可随时转换的双向DC∕DC变换器复合能源结构,如图1所示。利用再生制动控制器控制开关K,K接通时,锂离子电池和超级电容并联,驱动电机处于驱动状态;K断开时,锂离子电池和超级电容串联,电机处于再生制动状态,能量通过DC∕DC1给超级电容充电。超级电容器具有充电极快、储能容量大等优点,而再生制动时电机输出电压一般低于动力电池的端电压,难以直接给动力电池充电[6],故当K断开时,电机转变为发电机产生低压大电流经过DC∕DC1转换后直接给超级电容充电,避免大电流对动力电池产生冲击的同时,能更快更安全地回收能量,提升制动能量回收率。

图1 双向DC∕DC复合能源串并联结构Fig.1 Structure of Bi Directional DC∕DC Composite Energy
3 再生制动控制策略
3.1 电机最大制动转矩和制动功率
电动汽车控制系统基于MOSFET的永磁同步电机三相整流电路,采用SVPWM(Space Vector Pulse Width Modulation,空间矢量脉宽调制)磁场定向控制算法(FOC,Field Oriented Control)对驱动电机进行驱动和再生制动时的整流,故建立永磁同步电机(PMSM)转子同步旋转坐标系,实现电机数学模型的解耦。其驱动及再生制动状态时的相量图,如图2所示。图中:q、d—定子两相静止坐标系;Ra—定子绕组相电阻;ψf—转子磁链矢量;iq—定子q轴电流;iqt—定子等效的q轴转矩电流。
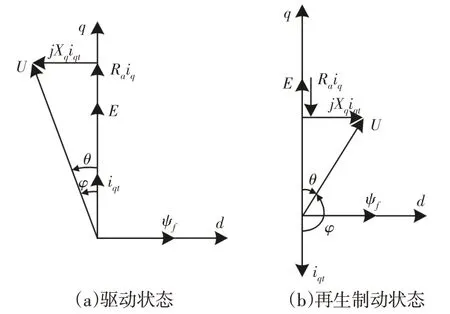
图2 电机在q、d轴的磁场定向控制算法相量图Fig.2 Phasor Diagram of Field Oriented Control Algorithm for Motor on q and d Axis
PMSM在再生制动状态时,q轴电流方向与其驱动状态时相反,电流iq流向双DC∕DC复合储能装置进行充电,通过磁场定向控制算法控制电机最大回收功率和最大转矩电流,即实现电机再生制动时最大转矩和最大功率的输出控制。PMSM无弱磁控制时,d轴电流id=0,可忽略铁损电流,稳态下PMSM输入功率和电磁功率为:

式中:Pin—PMSM输入功率;
Pe—PMSM电磁功率;
ω—转子角速度。
建立Pin与iq二次函数关系如图3所示,再生制动状态时iq<,此时电机回收功率最大;当iq=-ωψf∕Ra,此时电机再生制动转矩最大。
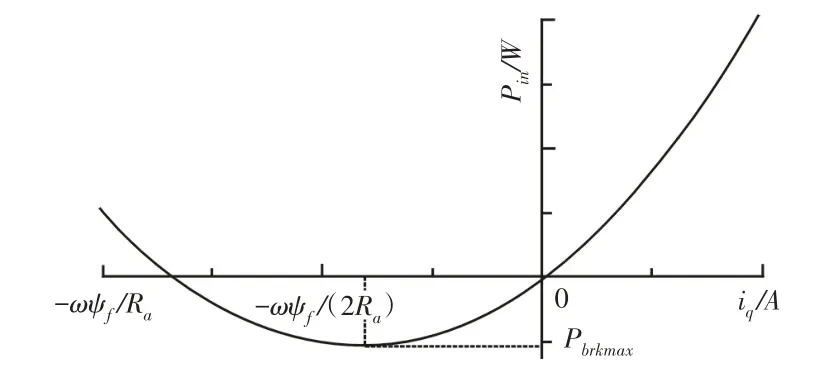
图3 电机功率与iq关系曲线图Fig.3 Relation Curve Between Motor Power and iq Current
故电机处于再生制动时可产生的最大电磁转矩为:

电机处于再生制动时产生最大功率时的电磁转矩为:

3.2 超级电容数学模型
超级电容能量回收结构简化图,如图4所示。图4中:Tebrk—电机需求制动转矩;Pebrk—制动需求功率;n—电机实际转速;ηm—电机转换效率;ηr—三相整流器转换效率;ηd—双向DCDC变换器效率;I d—三相整流器与双向DCDC转换器间电流;P c—超级电容回收功率;U c—电机至超级电容输出电压;I c—由双向DCDC转换后至超级电容的输出电流。

图4 电机再生制动功率平衡图Fig.4 Motor Regenerative Braking Power Balance Diagram
双向DCDC转换器的转换效率一般达95%以上,近似100%,在实际运用中取值1[7];超级电容的内阻一般低于0.5mΩ,可忽略不计,故在电机给超级电容充电过程中,效率计为100%。再生制动时超级电容的回收功率Pc为:

综上分析,通过控制电机三相整流器q轴电流Iq双向DCDC转换器的输出电流Ic,即可对电机再生制动转矩和再生制动功率进行调节控制,实现电机制动力和摩擦制动力的分配。
3.3 路面识别数学模型
路面状态直接影响制动过程,引入路面状态特征值,结合车轮滑动率和附着系数判别车辆行驶的路面状态。路面状态识别特征参数定义为:

式中:τ—路面状态特征值;ϕ(s)—附着系数,制动时称为制动力系数;s—制动过程的滑动率。
用车轮滑动率和附着系数的数学模型表征车轮与路面的附着特性,Burckhardt半经验轮胎数学模型[8]表达式为:

为更全面表征附着特性,Kiencke在半经验模型[9]基础上提出附着系数与滑动率的数学模型,表达式为:
式中:C1、C2、C3、P1、P2—不同路面状况相关常数;ϕk—附着系数与滑动率关系曲线的斜率,所有路面均取30。
将式(6)、式(7)代入式(5),令滑动率s和积分上限s分别取值Burckhardt和Kiencke模型的最佳滑动率Sp,得出不同路面特征值区间,如表1所示。判断路面特征值所在区间即可识别常见路面状况及平均附着系数。


表1 路面特征值区间Tab.1 Eigenvalue Interval of Pavements
3.4 制动力分配策略
纯电动汽车再生制动控制策略包括前、后轮制动力分配及摩擦制动力与电机再生制动力的分配,控制策略在保证制动安全和行驶稳定性的前提下,尽可能提高能量回收率。以ADVISOR(Advanced VehIcle SimulatOR,整车仿真软件)前轮驱动纯电动汽车为研究对象,建立再生制动控制策略仿真模型,整车参数,如表2所示。

表2 ADVISOR整车相关参数Tab.2 Relevant Vehicle Parameters in ADVISOR
3.4.1 制动力分配策略
以车辆制动力学为理论基础,建立以前轮制动力为X轴、后轮制动力为Y轴的笛卡尔坐标系,将ECE R13制动法规线、I线组、f线组和r线组作为制动力分配依据,建立不同附着系数下的改进型分配策略。分配策略如下:
(1)确立临界附着系数
如图5所示,针对所研究的纯电动汽车模型参数,确立临界附着系数ϕx值,将临界附着系数ϕx所对应的f线命名为fx。计算得出ECE法规线与X轴交点M处前轮制动力为2413.02N,与X轴交点Mx以公式M x=M∕0.9计算得出为2681.13N,同时将(Mx,0)代入式F br=F bf(L-ϕh g)∕(ϕh g)-Gb∕h g计算得出ϕx为0.38。其中,Fbr为后轮制动力,Fb f为前轮制动力。
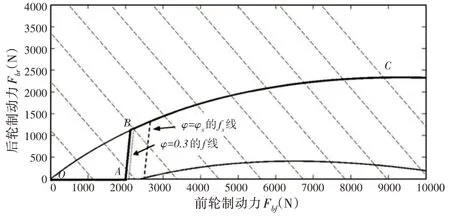
图5 低附着系数的制动力分配策略Fig.5 Distribution Strategy of Braking Force with Low Coefficient of Adhesion
(2)附着系数较小时(ϕ≤ϕx)
低附着系数的制动力分配控制线,如图5所示(图中设定ϕ=0.3),制动强度z在线段OA区间时,由电机提供再生制动力满足制动需求,后轮制动力为0;制动强度在线段AB区间时,前、后轮制动力按照AB线分配,即此时附着系数对应f线的90%,电机可提供的最大再生制动力和摩擦制动力共同承担。制动强度在线段B C区间时,前、后轮制动力按照制动理想曲线I曲线进行分配,电机可提供的最大再生制动力和摩擦制动力共同满足需求制动力。前轮制动力为:

(3)附着系数较大时(ϕ>ϕx)
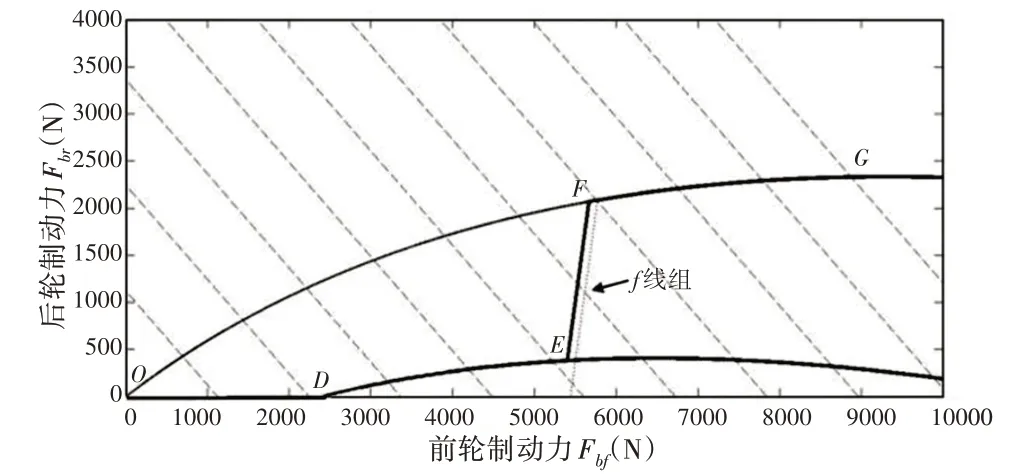
图6高附着系数的制动力分配策略Fig.6 Distribution Strategy of Braking Force with High Coefficient of Adhesion
当附着系数大于临界附着系数时,如图6所示。增加一段制动法规分配控制线D E线段,此时全状态下的前轮制动力为:

3.4.2实际电机再生制动力计算
根据PMSM电机工作特性,电机转速过低时,电机反电动势过低,不能给动力电池充电;电机转速大于电机额定转速时,电机再生制动转矩随着电机转速的增大而减小[9],故结合式(2)和式(3)综合分析得出在电机特性约束下的电机再生制动力为:

式中:ig—车辆变速器传动比;i0—车辆主减速器传动比;n0—电机参与再生制动的临界转速,转速过低时动能过小,不宜进行回馈制动;nrate d—电机基速,即电机额定转速。
超级电容的充电功率和电机再生制动功率存在单值递增关系[10],适当提高超级电容充电功率可提高再生制动回馈率,同时考虑超级电容参数特性和充放电特性,设最大充电电流不超过5C,并将再生制动回收的储能系统SOC上限值设定95%,以免过充影响电池健康程度。故当SOC≤95%时,超级电容充电功率P c=U c⋅i c,反之当SOC>95%,充电功率P c为0。在动力电池充电特性约束下的再生制动力为:

实际电机可参与的实际再生制动力除了与制动强度有关外,还与车速、储能系统SOC因素相关,为增加摩擦制动与再生制动的衔接平缓性,引入车速、SOC干扰因数函数[11~12],具体可表示为:

式中:υ—车速;λ1—车速干扰因数;λ2—电池荷电状态SOC干扰因数。
综上分析,PMSM电机在车速、储能系统和电机特性约束下可参与的最大再生制动力为:

4仿真分析
利用MATLAB∕SIMULINK建立复合电源再生制动系统模型,并将模型嵌入ADVISOR整车仿真软件中进行不同制动强度下的再生制动过程仿真,同时选取CYC_ECE和CYC_UDDS两种道路循环工况,对嵌入的控制策略模型进行整车仿真,将结果与ADVISOR原有模型的仿真结果进行对比分析。
4.1仿真模型建立
提出一种基于复合电源的改进型再生制动控制策略,在保证制动安全的前提能量回收率更高。建立双电层电容器仿真模型,利用SIMULINK的stern方程建立以超级电容输出电压为输出端的超级电容模型,其输出端电压为:

式中:Ns—超级电容串联数;N p—超级电容并联数;Ne—电容层电极数量;Q T—电容电荷;D—分子半径;ε0—电容材料介电参数;ε—自由间隙介电参数;R—理想气体常数;T—超级电容模拟工作温度;F—法拉第常数;Ai—电容电解质和电极间的界面面积;C—摩尔浓度;Rsc—超级电容总电阻;isc—超级电容总电流。

图7超级电容SIMULINK模型Fig.7 The Super Capacitor Simulation Model in SIMULINK
双层超级电容内部封装仿真模型,如图7所示。该部分由SOC估算模块、自放电模块和Stern电压计算模块组成。需求制动力分配控制仿真模型,如图8所示。以地面与车身垂直载荷的比值估算实时制动力系数,确立实时附着系数判断路面状态,仿真模型中建立“function”功能模块和“if”语句计算模块,以附着系数大小作为高、低附着状态控制策略的选择依据,以制动强度、车速高低、SOC状态、电机可实现的最大再生制动力作为制动力分配策略的控制依据。
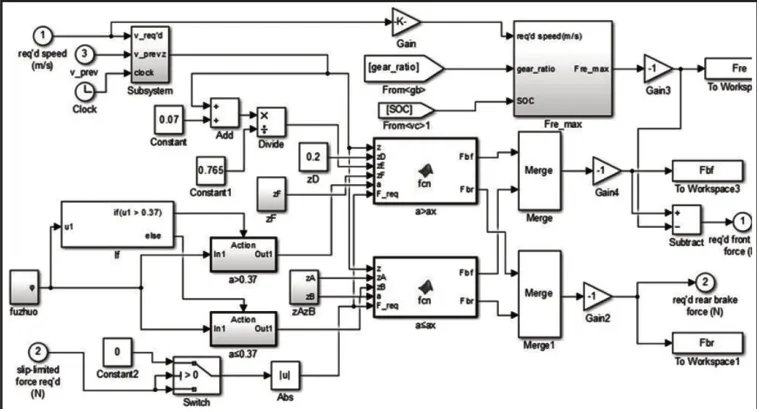
图8 需求制动力分配控制SIMULINK仿真模型Fig.8 Optimized Calculation Moduleof Braking Force Demanded Distribution
4.2 仿真结果分析
随机任一制动强度下,DC∕DC变换器实际电流和需求电流随时间的变化曲线,随着制动过程车速下降,制动功率降低,电流随时间非线性下降,与实际制动功率变化保持一致,如图9所示。再生制动回收时超级电容器的输入电流、端电压及SOC随时间的变化曲线,三者值皆随着再生制动的过程呈现非线性递增趋势,符合超级电容能量回收特征,如图10所示。

图9 任一制度强度的DC∕DC电流变化Fig.9 DC∕DC Current Variation of Any Braking Strength

图10 超级电容输入电流、端电压及SOC变化曲线Fig.10 Change Curve of Input Current,Terminal Voltage and SOC of Super Capacitor
ECE和UDDS工况的SOC对比图,如图11所示。CYC_ECE和CYC_UDDS工况下,能量管理系统SOC在改进再生制动控制策略和原制动力分配策略下的对比曲线,如图11(a)和图11(b)所示。图11(a)和图11(b)中,曲线1为ADVISOR原模型仿真所得SOC变化,曲线2为嵌入模型仿真所得综合SOC变化,对比1和2可知,嵌入的改进型控制策略模型所得SOC值下降速率减缓,整体值高于原策略SOC值,故所改进的再生制动控制策略可以回收更多的能量,提高回收效率。
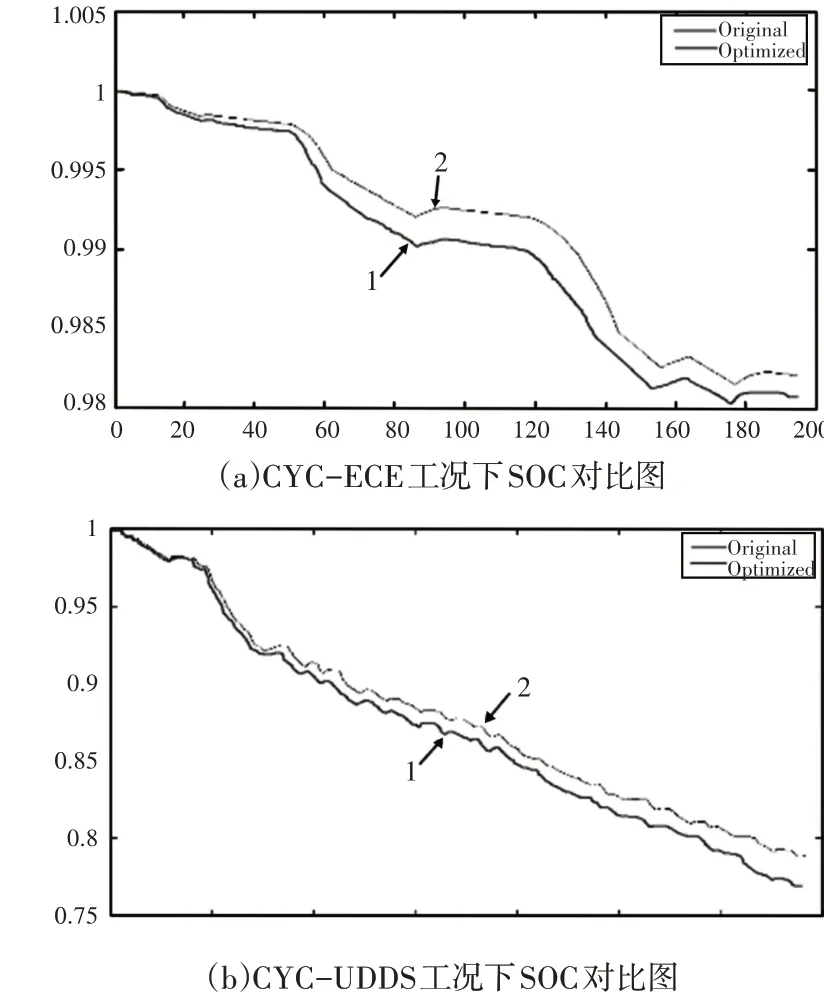
图11 ECE和UDDS工况的SOC对比图Fig.11 SOC Comparison Chart of ECE and UDDS
CYC_ECE和CYC_UDDS工况下,电机实际输出转矩在两种控制策略下的对比曲线,如图12所示。其中,电机转矩为负数且幅值较小的曲线为原控制策略仿真结果,反之电机转矩为负数且幅值较大的曲线为改进型控制策略仿真结果。对比可知,电机转矩为正时,两者曲线几乎重叠,即车辆处于驱动状态下,电机输出转矩一致;电机转矩为负时车辆处于制动状态,改进型再生制动控制策略电机输出转矩幅值更大,制动能量回收效果更佳。

图12 ECE和UDDS工况的电机输出转矩对比图Fig.12 Comparison of Motor OutputTorque in ECE and UDDS
5 结束语
提出一种串、并联可随时转换的双向DC∕DC变换器复合能源结构,采用SVPWM空间矢量脉宽调制方法控制电机再生制动输出转矩和输出功率,并考虑车速、制动强度、SOC影响因素,建立可识别路面附着系数、以f线组、r线组、理想I曲线和ECE法规线为制动力分配基础的再生制动力控制策略。以MATLAB∕SIMULINK为模型建立平台,以ADVISOR为整车仿真平台,进行了不同制动强度的再生制动仿真测试,并选取CYC_ECE和CYC_UDDS两种道路循环工况,对嵌入的控制策略模型进行整车仿真,与ADVISOR原有模型的仿真结果进行了对比分析,证明了所设计控制策略的合理有效性。
猜你喜欢
山东冶金(2019年3期)2019-07-10
四川冶金(2018年1期)2018-09-25
消费导刊(2018年10期)2018-08-20
通信电源技术(2016年1期)2016-04-16
电测与仪表(2016年20期)2016-04-11
电源技术(2015年1期)2015-08-22
电源技术(2015年7期)2015-08-22
电机与控制应用(2015年3期)2015-03-01
河南科技(2014年12期)2014-02-27
常熟理工学院学报(2011年4期)2011-03-20
