
一种磁斥力负刚度结构的线性优化设计
2021-08-26 11:01王卫荣张子文葛新方
机械设计与制造 2021年8期
王卫荣,张子文,葛新方
(合肥工业大学机械工程学院,安徽 合肥 230009)
1 引言
由于振动在机械制造和应用的诸多领域中往往会带来不利影响,例如产生噪声,降低精度,缩减寿命等,因而始终是人们关注并着力解决的重要问题。为了尽可能消除振动的危害,形成了被动隔振、主动隔振、半主动隔振以及混合隔振等诸多解决方案。被动隔振由于结构简单,成本低廉而被广泛应用,但传统被动隔振结构在精密加工中的低频和超低频隔振问题中受自身特性所限而无法使用,因而人们往往采用造价较高,结构复杂的主动隔振结构[1]。近年来,各国学者开始广泛关注可应用于低频隔振的被动隔振结构[2、3],其中最具有代表性的就是正负刚度并联结构[4]。通过构造负刚度与正刚度结构的并联,可以解决单纯串联正刚度结构带来的支撑力不足和稳定性缺失问题,有效降低系统动态刚度的同时保持较高静态刚度,从而降低系统固有频率,提高其低频隔振性能[5]。磁致负刚度结构是其中应用较多的结构之一[6]。文献[7-8]分别提出了基于永磁体间磁引力和磁斥力的三磁体负刚度结构,较好地降低了系统的固有频率。文献[9]在此基础上用电磁铁作为替代,研究了对应负刚度结构的特性。文献[10]则研究了基于磁力的准零刚度隔振器特性。但目前常见的负刚度结构仍然存在一些问题,尤其是负刚度值的非线性较强,会随负刚度结构的振动位移发生显著变化,难以在整个振动位移范围内保持稳定,振动位移较大时,负刚度值甚至会急剧衰减,这就导致整个结构在工作中无法保持稳定不变的性质,限制了这样的负刚度结构在更多场合的应用。而在分析计算时,由于其非线性较强,一般只能在微振动时将其负刚度值视作不变或线性,大大增加了计算的复杂性。为了尽可能实现负刚度结构的刚度线性化,文献[11]从磁体尺寸入手,在一定程度上降低了磁致负刚度结构的刚度非线性。文献[15]通过改变三磁体负刚度结构的磁体尺寸和间距,将结构的最大非线性度从70%降低至25%,取得了良好的效果。总体上讲,虽然部分研究涉及到一些负刚度结构的刚度线性优化问题,但对于负刚度结构刚度线性化设计的专门研究工作目前还不是很多。
为此,设计了一种基于磁斥力的负刚度结构设计,仿真结果和动力学分析表明,它能显著改善基于磁斥力的三磁体负刚度结构刚度值的非线性,提高在较大位移范围内的负刚度值稳定性,从而相应提升负刚度结构的可用振动位移范围,为负刚度结构的应用提供理论参考。
2 磁斥力负刚度结构的基本原理
2.1 正负刚度并联结构工作原理及负刚度结构特性
虽然正刚度结构直接串联可以降低系统刚度,获得更低的固有频率,但同时也会使系统出现支撑力不足的问题,导致稳定性大幅下降。而对于正负刚度并联结构,则是首先单纯利用正刚度元件使系统达到静平衡,再在这个静平衡位置给系统施加负刚度。由于负刚度结构不提供支持力,所以静止时系统的质量完全由正刚度元件支撑,负刚度结构完全不影响正刚度结构的性能,而运动时,负刚度结构脱离平衡位置开始工作,就可以达到降低系统动态刚度的目的[12]。由于结构的构造原因,负刚度结构的刚度曲线往往是非线性的[13],需要分析其具体模型,而其性质与正刚度结构相反。理论和实验研究表明,正负刚度并联结构的静载能力不会因此降低,反而会相应提高[4]。
2.2 永磁体间的磁斥力模型
磁斥力负刚度的实现依靠磁体之间的相互排斥作用,下面对永磁体模型进行简单分析[14-15]。设两长方体磁体M和m,尺寸分别为2A×2B×2C和2a×2b×2c,根据矩形永磁体之间的受力关系可知磁体m受磁体M的作用力为:

2.3 基于磁斥力的三磁体负刚度结构
下面简要分析基于磁斥力的三磁体负刚度结构的负刚度形成原理。将磁体M1、M2和m作竖直平行布置,磁极方向应使磁体m与M1、M2均互斥,m位于固定的M1、M2的连线中点处,此时m受力平衡,如图1所示。假设受到外界扰动,磁体m脱离平衡位置且沿y方向运动且无法自行恢复,表现出y方向的负刚度特性。基于式(1)以及刚度的定义,该结构在y方向上的刚度为:


图1 磁斥力负刚度的形成原理Fig.1 Principle of Triple-Magnet Repulsion Force Negative Stiffness
假设永磁体为钕铁硼材料[18],相应的,J、j的大小取1.35T。令磁体M1、M2和m的尺寸均为(200×20×20)mm(分别为x、y和z方向上的尺寸,下同),可以得到Ky变化的三维曲线,由磁体在z方向的尺寸可知,zd至少为20mm,如图2所示。

图2 zd或ym一定时的刚度特性变化曲线Fig.2 Stiffness Characteristic Curve(zd or ym is constant)
可以看出,给定磁体m在y方向的位移ym和M,m的间距zd,结构刚度唯一确定。在|ym|=0的平衡位置附近刚度为负,且负刚度值随着zd的增大而减小。|ym|增大时,负刚度值会在一定范围内迅速减小(后面的讨论都只限于这个负刚度值单调变化的位移范围),甚至变为正值,造成负刚度结构失效,且负刚度值越大其非线性程度越强。因此,在使用这样的结构时,负刚度值虽然理论上是|ym|=0时的刚度值,但一旦位移较大或安装位置不够理想时都无法保证这个值的稳定。
3 新型磁斥力负刚度结构模型
3.1 新型磁斥力负刚度结构设计
前面介绍了基于磁斥力的三磁体负刚度结构(以下简称三磁体结构)形成负刚度的原理,由于负刚度结构的不稳定性,实际使用时需并联正刚度元件。之前提到,正负刚度并联结构是在正刚度元件使系统达到静平衡时施加负刚度,因此负刚度结构不影响静态时系统的支撑性能。由于二者可以直接并联,这样工作时的总刚度即为二者之和,所以可以单独研究负刚度结构。
根据前面的分析,三磁体结构的刚度特性取决于其中的三块磁体,其刚度曲线为图2所示的形式,因此存在非线性特性强的问题。为了改善这类磁致负刚度结构的刚度非线性度,下面就以三磁体结构为基础,设计一种刚度非线性度较低的磁致负刚度结构。
考虑图中的结构,两边分别采用铰接连杆与三磁体结构构成两个对称布置的负刚度单元,如图3所示。
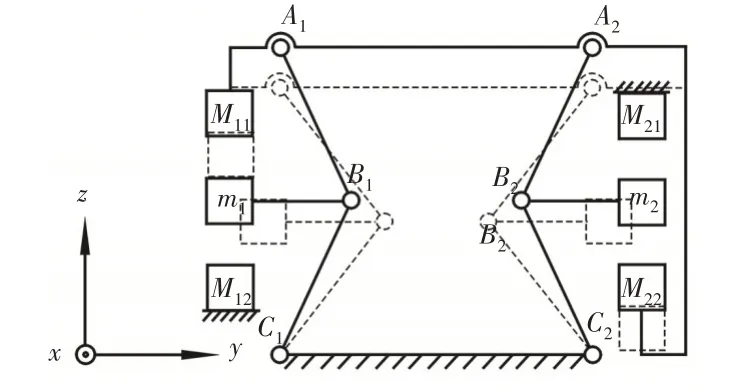
图3 新型磁斥力负刚度结构简图Fig.3 Structure Diagram of the New Type of Negative Stiffness Structure Based on Magnetic Repulsion Force
图中实线部分为平衡位置,此时磁体m1、m2不受力。设杆A1A2只有z方向的平动。首先分析-z方向,如图中虚线部分所示,受到扰动后,连杆机构会带动磁体m1、m2分别产生+y和-y方向的位移,从而脱离平衡位置,形成负刚度,并通过传导,最终得到-z方向(即A1A2与C1C2之间)的负刚度。与此同时,M11和M22会随A1A2向下移动。因为磁斥力比m的重力大很多,能达到其几十甚至上百倍,因此忽略m的重力。从而由于+z和-z方向的斥力,m能始终保持在上下两磁体的中间平面上。对于+z方向,分析与-z方向对称,这里不再赘述。
3.2 结构的刚度特性分析
为了简便分析图中的部分,如图4所示。即图3中某一侧的负刚度单元。其中L为杆AB及BC的长度,h、d分别为磁体m位于平衡位置时B点与A、C两点的竖直和水平距离。在从图示实线位置运动到虚线位置的过程中,磁体m以及杆A1A2均会下降,导致zd发生变化。根据几何关系容易得到zM,zm,zd和ym之间的关系为:
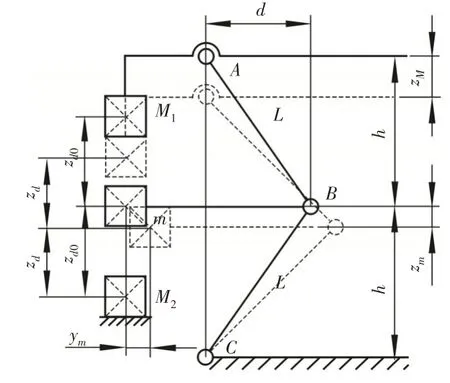
图4 新型负刚度结构特性分析Fig.4 Characteristics Analysis of the New Type of Negative Stiffness Structure

zd0为m在平衡位置时与任一M的距离,称为基准间距。由于zd也发生了变化,因此Ky曲线将不再是图2(a)的形式。
鉴于我们设计结构的负刚度值最终表现在z方向,这里直接计算Kz。
m在x方向没有位移,结合式(1)、式(11),可以得到m受力也即B点受力F(yzM),方向水平向右,即Fy可完全由zM确定。进而等效到竖直方向上的力为
根据负刚度的定义,得到这一侧的负刚度单元在z方向上的刚度为
此外,由于zd改变,M1和M2之间也会由于引力作用产生一个动刚度Kzp,但由于m的阻隔,M1、M2之间的磁通主要是用于排斥m,仅有外部极少的剩余磁通能够产生二者之间的引力,因此Kzp往往比Kz小几个数量级,可忽略不计。同理,另一侧负刚度单元的刚度为K′z。由于结构的对称性,K′z的曲线与Kz在平面坐标上关于纵轴对称。整个结构在z方向上的总刚度为:K=Kz+K′z(14)
通过前面的分析可知,由于zd一定,三磁体负结构的刚度曲线为图2(a)中形式,刚度值仅是ym的函数,且总是相对于平衡位置对称变化的。但对于我们设计的新型负刚度结构中的负刚度单元而言,Ky同时受ym和zd两个变量影响。
如图4,当m向右侧移动时,|ym|增大,m离开平衡位置,Ky随之减小,但同时zd减小,M1、M2互相靠近,又会导致Ky增大;而m向左侧移动时,也会离开平衡位置,Ky随之减小,同时zd增大,Ky将进一步减小。如果zd对Ky的影响占主导地位,就能使这个范围内Ky曲线单调增加或减少,进而使Kz曲线发生类似改变。若能使Kz、K′z曲线较好地保持线性增减,整个结构的负刚度值K即二者之和,就能较为稳定。为此,需要对结构参数进行具体设计。
4 新型磁斥力负刚度结构的设计
4.1 结构参数对刚度的影响
为了获得理想的单调变化曲线,得到相对较大振幅中更稳定的负刚度值,需调整结构参数,为此要了解各参数对负刚度特性的影响,从多种影响因素中找出并分析相对重要的。首先分析磁体尺寸对刚度曲线的影响。对磁体尺寸均为(200×20×20)mm的三磁体结构,改变A或C作出Ky图像,发现磁体在x、z方向的尺寸变化只影响Ky的大小,对Ky曲线的形状无本质影响。
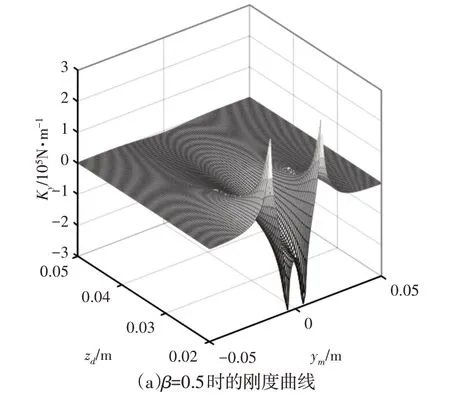
因此主要考虑磁体M1、M2和m在y方向上的尺寸变化。在α=γ=1时改变B值,分别取β=B∕b=0.5、2,作出Ky图像。观察图5发现,当M1、M2在y方向上的尺寸与m不同时,负刚度值会出现“双峰值”现象,即最大负刚度值不再位于平衡位置,而是对称的出现在某一位移处,也就是说有两个负刚度峰值,其余性质则与之前相同。而当β和zd的取值合适时,两峰值之间Ky为负且能在较大位移内保持相对平缓的变化,这一特点正符合我们设计的新型负刚度结构的要求。

图5 β不同时的刚度特性曲线Fig.5 Stiffness Curve whenβis Different
其次是基准间距zd0。观察曲线可知,增大zd可以相应减小负刚度值并降低其非线性程度。若要使结构工作在较大的zd处并降低Kz,可以相应取较大的z d0。
最后分析传动机构。其参数有L、h、d,但L一定时,确定h就能确定d,故以h为主要参数。由式(11)得,ym越大zd变化越快非线性越强,而h增大会使机构工作在非线性较小的区间,同时由式(12)知h增大也会使Fz增大从而提高Kz。
这样在得到较稳定的刚度变化曲线以后,还可以通过适当选择相关参数实现对负刚度值的调整。
4.2 结构参数设计实例
通过下面的设计实例,将可以看到我们设计的新型负刚度结构相对于三磁体结构对负刚度值非线性度的优化。这里采用的作为对比的三磁体结构中,三块磁体的尺寸均为(200×20×20)mm。
根据之前内容,设计的新型负刚度结构包含两对称布置的负刚度单元,每个都由一个三磁体结构和相应的铰接连杆构成。初定新型负刚度结构中磁体的尺寸与三磁体结构相同,均为(200×20×20)mm。由于两个负刚度单元包含两个三磁体结构,因此在得到新型负刚度结构的刚度值后,我们取该值的1∕2与作为对比的三磁体结构的刚度值放在一起比较。
从降低非线性度和保证两侧负刚度单元的负刚度值单调变化两方面考虑,初定zd0=50mm。经计算,此条件下上述三磁体结构的负刚度最大值即理论值为-1.2535×104N∕m。分析设计的新型负刚度结构时,仍然先得到-侧刚度Kz,再由对称性得到另一边刚度K′z,以得到新型结构的总刚度K=Kz+K′z。
由于振动位移相对于传动机构的尺寸较小时容易保持稳定,初定L=250mm,h=200mm。鉴于传动机构输入输出的非线性,直接分析K曲线较为简便。利用前述方法建立模型,得到结构刚度K关于z方向位移zM的曲线。固定m1和m2尺寸不变,改变M11、M12、M21和M22尺寸,不同β对应的K曲线,如图6所示。可以看到不同β会带来K值大小和非线性的变化。为了得到良好的线性度,同时希望新型结构的刚度值能尽可能接近作为对比的三磁体结构的刚度值,因此选择β=3。由于K值略大于我们的期望值,因此适当调整h、zd0以及磁体尺寸。最终得到结构参数为:M11、M12、M21和M22的尺寸均为(200×60×20)mm,m1和m2的尺寸均为(198.8×20×20)mm,h=210mm,zd0=57.2mm。将K值取1∕2与作为对比的三磁体结构比较,二者刚度曲线,如图7所示。两种结构在不同振动位移的详细负刚度值及误差,如表1所示。

图6 不同β取值时的K曲线Fig.6 Curve of K whenβis Different

图7 三磁体结构与新型结构的负刚度稳定性对比Fig.7 Comparison of Negative Stiffness Stability between the Triple-Magnet Structure and the New Structure

表1 两种结构在相同位移下的负刚度值及误差对比Tab.1 Comparison of Specific Negative Stiffness Values and Errors between Two Structures under Same Displacement Conditions
可见,新型负刚度结构与三磁体结构在振动位移为0时刚度值非常接近,说明达到了预期刚度值。但三磁体结构在位移较大时无法保持负刚度值稳定,超过±1mm后随位移增大负刚度快速衰减,结构失去原特性。而最终得到的新型负刚度结构的误差相比则大幅降低,尤其在较大位移±5mm和±10mm时,由9.15%和33.41%分别降低至0.27%和0.79%左右。因而新型负刚度结构能大大改善三磁体结构的非线性特性,提高可用振动位移范围,在一定振动位移下也能提供更高稳定性。
当然,如2.3部分所述,|ym|增大过程中三磁体结构的负刚度值单调变化这一性质只在一定范围内成立,因此新型负刚度结构也有相应的允许最大振动位移,即负刚度单元的负刚度随位移增大而单调变化的区间,观察对应的K-zM曲线即可知道允许的最大振动位移。
4.3 动力学特性分析
用上面作为对比的两种负刚度结构分别构成正负刚度并联弹簧,并研究基础受到简谐激励情况(即被动隔振情况)下的系统响应。设并联的正刚度弹簧刚度为2.0000×104N∕m,负载为100kg,则并联后系统固有频率约为ωn=8.6rad∕s。为了便于计算,根据图7中的数据,可以通过拟合得到二者的近似刚度曲线为二次曲线,则系统弹性力为三次函数。设两系统均在x方向振动,则运动方程为:
式中:xr—负载相对于基础的位移;Fb—基础振动的振幅;ε—非线性弹性系数。
利用谐波平衡法求解,可得负载相对运动的一次谐波解为:

式中:λ—频率比。则负载的绝对运动为:

由此得两正负刚度并联系统在相同基础激励下绝对运动的幅频特性,如图8所示。这里取足够大的10mm为基础振幅。可以看到,其他条件均相同的情况下,未经优化的三磁体结构构成的系统的幅频特性表现出了较强的非线性特性,阻尼比ξ提高到0.4左右时跳跃现象才会消失,通过计算可知,ξ降低到0.33以下其响应会出现无界的情况。我们设计的新型负刚度结构与之相比非线性特性则有所减弱,ξ提高到0.09左右跳跃现象就会消失。选取两种结构均无跳跃现象的阻尼比ξ=0.4,此时相同激励频率(λ=1.5)下两种结构的时域响应波形,如图9所示。可以看到,新结构的响应振幅更小,结合图8可知,非线性的减弱使其出现共振的频率与三磁体结构相比进一步下降,共振频率下的响应振幅也小于三磁体结构,因此隔振效果更优。事实上,如果激励幅值降低,刚度非线性系统响应的非线性特性会随之减弱。因此,在更小的振幅下,新型负刚度结构的非线性特性将会进一步减弱。这无论是对于非线性系统的近似分析,还是将其近似简化为线性系统处理,都能提供一定的帮助。

图8 不同阻尼比下两种系统的频域响应Fig.8 Frequency Response of Two Systems with Different Damping Ratios

图9 相同条件下两种系统的时域响应Fig.9 Time-Domain Response of Two Systems under Same Condition
5 结论
(1)通过对三磁体负刚度结构的刚度变化曲线及特性的分析,设计了一种基于磁斥力的新型负刚度结构。静力学和动力学仿真结果表明,相对于原有的基于磁斥力的三磁体负刚度结构,新型负刚度结构能够获得期望的负刚度值,并大幅降低负刚度值的非线性特性,从而可以大大扩展负刚度结构的振动位移范围,提高稳定性。在进行动力学分析时,这种负刚度结构的弱非线性特性也有利于近似分析或是将系统简化为线性系统处理。
(2)结构中各参数既会影响结构负刚度的非线性度,也会影响结构的负刚度大小,为了降低结构负刚度的非线性度,同时调整得到符合期望的负刚度值,需要合理选择这些参数。
猜你喜欢
材料与冶金学报(2022年2期)2022-08-10
中学生数理化·中考版(2021年10期)2021-11-22
赤峰学院学报·自然科学版(2021年10期)2021-11-11
有色金属科学与工程(2019年2期)2019-05-10
中学物理·高中(2016年11期)2016-12-15
中国环境监察(2016年7期)2016-10-23
通信电源技术(2016年1期)2016-04-16
通信电源技术(2016年5期)2016-03-22
材料与冶金学报(2015年3期)2015-12-23
考试周刊(2015年68期)2015-09-10
