
220kV带电线路树枝修剪机器人结构设计及实现
2021-08-26 11:00吴功平秦志军
机械设计与制造 2021年8期
姜 鹏,吴功平,杨 松,秦志军
(1.武汉大学动力与机械学院,湖北 武汉 430072;2.国网吉林省电力有限公司白山供电公司,吉林 白山 134300)
1 前言
高压输电线路走廊树木的生长及在大风天气下的摆动等情况使树枝很容易与高压线路距离过近导致短路,造成巨大的经济损失。目前采取的措施是人工爬树修剪或者相关作业车辆辅助人工修剪,这两种方式劳动强度大,风险高。对于车辆难以进入的原始森林地区有时甚至会砍伐树木,这将可能引发相关社会与法律问题。故利用机器人修剪高压输电线路走廊树枝成为迫切需求。
美国安达略水力发电厂开发的一种修剪树木的机器人系统,通过手动控制器遥控架空装置末端的锯片对树枝进行修剪作业,使作业人员远离这种危险的环境[1],但对于车辆无法到达的山区线路无法进行修剪作业。文献[2]提出了一种沿树干直爬和螺旋攀爬两种方式的机器人,在攀爬的同时完成对树枝修剪的机器人[2]。文献[3]设计了一款由爬升机构、链锯机构、和控制器三部分组成,保持机器人始终在树上而完成树枝修剪作业的机器人[3],但文献[2-3]中的机器人均对树木的形状有一定的限制。文献4研究了不同刀具刀片材料对切削力的影响,为末端执行机构修剪作业时切削力的计算提供了理论依据[4]。文献[5]设计了一种通过超长绝缘操作臂携带末端工具实现对高压线路走廊下方及两侧树枝修剪作业的机器人构型[5],但由于是在下相导线上行走,机器人上线后带来的附加弧垂可能导致导线与树枝间距离小于所要求的安全距离。
基于上述现状,这里提出了沿地线行走的树枝修剪机器人(Branch Trimming Robot,BTR),包括移动机器人平台、绝缘绳卷扬升降及回转平台、末端作业平台三部分。根据作业空间分析得出树枝修剪机器人构型原理,并依此确定了相关构型参数;在SOLIDWORKS里建立了三维模型;利用遗传算法求解得到了质量最小的绝缘组合臂参数最优解,并在ABAQUS里对绝缘组合臂进行了应力应变分析及模态分析;利用试验样机在吉林浑白线上进行了多次试验,试验结果表明其能够完成对220kV带电线路走廊树枝修剪作业,验证了其设计的合理性与可行性。
2 树枝修剪机器人作业空间及构型原理
2.1 作业空间分析
如图1(a)所示,当高压输电线路走廊树枝与下相导线间距离小于相应电压等级输电线路所要求的距离时就可能导致短路跳闸等事故,故树枝修剪机器人的作业任务就是修剪该区域内的树枝,将该区域称为待修剪区域,如图1(b)中圆1,其半径为R1。圆2为导线的危险区域,半径为R2。
考虑到移动平台若在下相导线上行走,在自重作用下带来的附加弧垂可能导致机器人刚上线便会使下相导线与树枝间距离过近发生短路的问题,故机器人选择在地线上行走。尽管如此,为了上下线的方便及防止附加弧垂导致地线与上相导线间距离过近,须严格控制整个机器人的重量。为满足图1(b)中所示的待修剪区域,树枝修剪机器人构型参数需满足式(1)。

式中:R1—作业半径;
f1—机器人上线后地线的总弧垂;
1997年,河北华雨与中国农机研究院合作,开创了大型电动喷灌机事业,逐步形成年产1000台套的生产能力。2012年创建了齐齐哈尔华雨机械制造有限公司,新增年产1500台套的生产能力。公司先后完成国家“九五”攻关项目DPP平移式喷灌机、DYP系列电动圆形喷灌机等多项重大科技攻关项目。其中“DYP系列电动圆形喷灌机”已列入国家支持推广产品及各省补贴产品目录。
f2—下相导线自然弧垂;
H1—地线悬挂点到下相导线悬挂点的垂直距离;
L1—作业臂长度;
L2—移动平台到末端作业平台的最大距离。
根据文献[7]规定,220kV输电线路导线与树木(考虑自然生长高度)之间的最小垂直距离应该大于4.5m,即作业半径R1=4.5m,故作业臂长度L1=4.5m[7]。根据文献8,220kV输电线路杆塔地线到下相导线最大距离为H1=22m[8],f1与f2之差较小,此处忽略,故取L2=27m。另外,为保证修剪作业过程中的安全性,整个末端作业平台需满足220kV输电线路带电作业工具绝缘性能要求,故L2构件及L1构件应耐压220kV,且作业臂的有效绝缘距离须大于R2=2.1m[7]。
如图1(b)所示,当树枝修剪机器人构型参数满足上述要求后,其实际修剪区域为矩形EFGH区域,与待修剪区域圆1相比,图中阴影部分区域无法覆盖。故在实际应用过程中,对于不同型号的杆塔,须根据实际情况在作业臂根部加装长度为L3的绝缘管,以完成对待修剪区域内所有树枝的修剪。

图1 树枝修剪机器人作业空间分析图Fig.1 Working Space Analysis of BTR
2.2 树枝修剪机器人构型原理
根据2.1分析,设计的树枝修剪机器人构型原理图,如图2所示。

图2 树枝修剪机器人构型原理图Fig.2 BTR’s Mechanism Diagram
(1)移动平台沿着地线通过行走轮的两个旋转关节1和2行走到达待修剪区域,移动关节5和6可实现“蠕动”式行走以利于通过线路上的防振锤等线路金具。
(2)到达待修剪区域后,两个纵移关节3和4压紧地线,防止机器人在修剪作业过程中发生倾覆。通过卷扬及定滑轮构成的关节7和8带动末端作业平台在铅垂面内上下移动,调整末端作业平台与树枝间的铅垂距离。同时,结合可以在水平面内360°旋转的关节9,可以调整机器人末端与树枝间的位姿状态。
(3)调整好姿态后,考虑到树枝的弹性,对于成束的树枝及较粗的树枝,首先利用夹爪上的两个旋转关节10和11夹住树枝,在旋转关节12的驱动下实现锯片的缓慢进刀,完成对树枝的修剪。
3 主要机械结构设计
根据树枝修剪机器人构型原理图,设计出树枝修剪机器人虚拟样机,如图3所示。
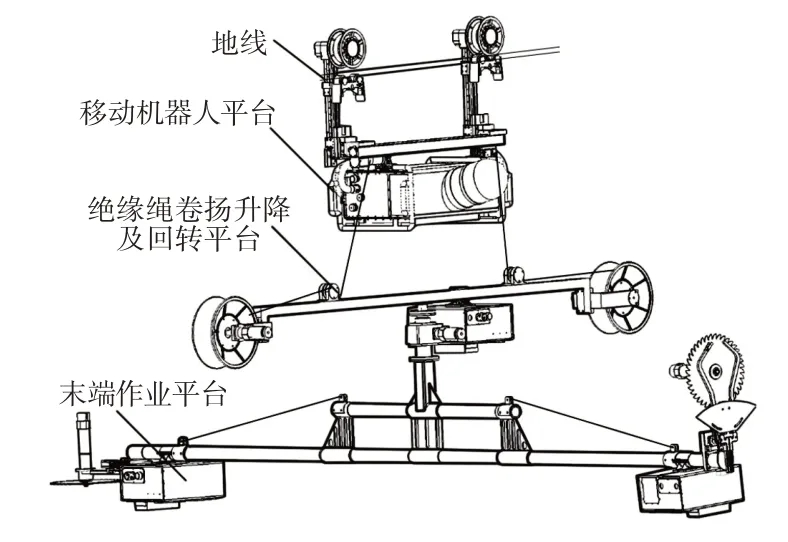
图3 树枝修剪机器人虚拟样机Fig.3 Virtual Prototype of BTR
树枝修剪机器人主要包括移动机器人平台、绝缘绳卷扬升降及回转平台、末端作业平台三部分。绝缘绳卷扬升降及回转平台通过两根绝缘绳连接在移动机器人机械臂两端,利用卷扬可以调整末端作业平台相对下相导线的距离,实现对不同高度树枝的修剪。同时,通过减速箱中的蜗轮蜗杆机构带动整个末端作业平台在水平面内360°旋转,调整末端作业平台与树枝间的位姿关系。
如图4(a)所示,绝缘绳卷扬升降及回转平台主要包括绝缘绳,卷扬机构(包括卷扬滚筒、卷扬电机、滑轮)及横杆。因为绝缘绳卷扬升降及回转平台分别与上相、中相、下相导线接触,故绝缘绳必须满足耐压220kV要求。所选绝缘绳为防潮蚕丝绳,满足绝缘性能要求。两根绝缘绳绕过卷扬滚筒通过定滑轮改变方向,结合卷扬滚筒v字形结构,在重力作用下可以使绝缘绳在缠绕过程中尽量向滚筒的中垂面靠拢,极大的减小滚筒的直径。

图4 树枝修剪机器人各部件结构图Fig.4 The Structure of BTR Assembly
如图4(b)所示,末端作业平台包括绝缘组合臂、末端执行机构、控制箱三部分。为减小绝缘组合臂末端的挠度,将其设计为三段式结构,其中,中间一段采用两根绝缘管上下并排布置的方式,另外两段为单根绝缘管,再通过张紧的绝缘绳将中间一段绝缘管的上面一根绝缘管的两端分别与第一段和第三段绝缘管连接在一起。其中,中间一段绝缘管长度为6m,其他两段长度均为1.5m,即每侧的有效绝缘距离为4.5m,大于2.1m,满足220kV输电线路带电作业工具绝缘要求。另外,绝缘管的材料为环氧树脂,这种材料具有较高的强度和柔韧性,且密度相对较低,斜拉式绝缘绳是直径为8mm的防潮蚕丝绳,二者均满足220kV耐压要求。
如图4(b)所示,考虑到树枝的不同生长形态,末端执行机构根据圆盘锯与水平面间夹角关系分为水平与垂直两种布置方式,对于与水平面间夹角较大的树枝,用水平布置的末端执行机构修剪。反之,则用垂直布置的末端执行机构修剪。如图5(a)所示,因为树枝具有一定的弹性,在锯片修剪过程中可能发生反弹,必须先将树枝夹住然后进行修剪,故设计的末端执行机构主要包括圆盘锯、曲柄和夹爪三部分。因水平与垂直布置的末端执行机构修剪过程相同,此处只介绍垂直布置的末端执行机构修剪原理。对于直径较小的树枝,利用初始状态进行修剪,如图5(b)所示;对于直径较大及成束的树枝,首先曲柄旋转90°,通过水平极限位传感器检测确定曲柄到达水平位置,接着夹爪张开到最大角度120°,如图5(c),调整末端位姿,夹爪夹住树枝,如图5(d),最后锯片在曲柄旋转带动下缓慢进给,完成对已被夹爪夹住树枝的修剪,恢复到图5(b)所示状态,该状态是通过竖直极限位传感器确定曲柄到达竖直位置的。其中,末端挡板可以随夹爪的开合而上下运动,可以有效的防止细小树枝进入到夹爪的铰接区域阻碍夹爪的开合。

图5 末端执行机构及工作状态图Fig.5 End Effector and Working Condition Diagram
4 绝缘组合臂的优化及分析
4.1 基于遗传算法的绝缘组合臂优化
根据上述树枝修剪机器人构型设计,考虑到绝缘组合臂长度较长且为悬臂梁结构,同时为控制机器人重量,需对其参数进行优化设计。构型参数最优解主要从3个方面考虑:(1)满足材料强度要求;(2)结构质量较小;(3)绝缘组合臂末端挠度较小。故将结构质量作为期望目标,建立数学优化模型,如式(2)、式(3)所示[9-10]。

图6 绝缘组合臂Fig.6 Insulated Arm
目标函数为:

式中:D1—D4—绝缘臂的直径;L0—L2—各段绝缘臂长度,L0=4500mm;h1—h2—绝缘臂壁厚;F为绝缘臂自重、末端集中载荷及斜拉绝缘绳向上分力三者等效在末端处的总载荷;I1—I2—各段绝缘臂的惯性矩;m0为绝缘组合臂的质量;绝缘臂的弹性模量E=14000MPa;绝缘臂许用应力[σ]=40MPa;w—末端挠度值;W—抗弯截面系数;Mmax—最大力矩;绝缘管密度ρ=1.8g∕cm3;实验测得斜拉绝缘绳可提供的F拉=230N。为保证修剪过程中树枝与绝缘组合臂尽可能少发生干涉,以及留出控制箱和末端执行机构的安装位置,取L2=1.5m,h=0.2m。
根据上述建立的优化数学模型,可利用遗传算法进行求解。因为从统计学来讲,对于此类目标优化问题采用遗传算法可以加快得到最优解的速度。设定种群大小为200,后代交叉比例为0.6,最大迭代次数为200,种群进化完毕后可得到pareto图,如图7所示。从图中可以看出,采用遗传算法经过105次迭代后,目标函数开始收敛。计算的最优解结果,如表1所示。

图7 遗传算法在Matlab里运行的结果Fig.7 Results of Genetic Algorithm in Matlab

表1 优化后的绝缘组合臂参数Tab.1 The Parameters of the Optimized Insulated Arm
4.2 绝缘组合臂的有限元分析
利用ABAQUS对上述求得的绝缘组合臂进行有限元分析,包括建立模型,设定材料属性,进行网格划分,添加载荷及边界条件,提交计算。由图8(a)知,最大应力在绝缘臂1的根部,值为35.2MPa,小于许用应力40MPa,满足强度要求。其中沿绝缘臂长度方向的应力分布不均匀,主要由两根绝缘臂的连接件处有应力集中引起,远离连接处其应力分布均匀。由8(b)知,最大应变为154mm,与4.1中计算的应力及挠度值基本吻合。同时,利用ABAQUS对组合绝缘臂进行模态分析,前四阶振型频率分别为3Hz、7Hz、13Hz、14Hz,而末端锯片的转速为3000r∕min,即频率为50Hz,绝缘组合臂振型频率远小于末端锯片的频率,故不会发生共振,符合设计要求[11]。
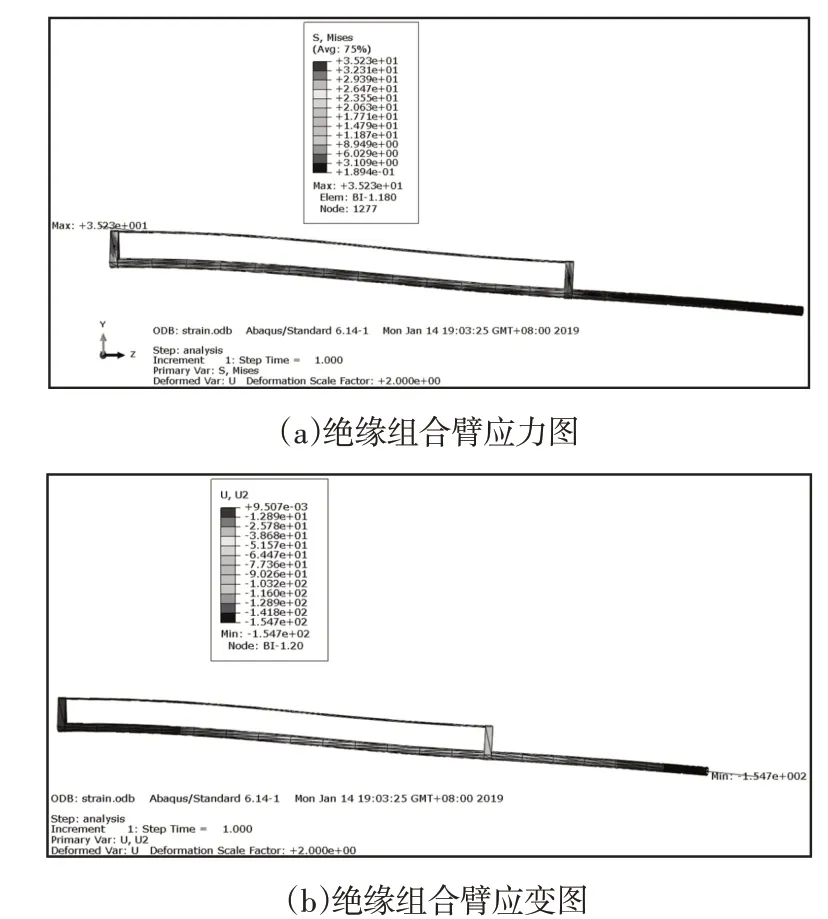
图8 绝缘组合臂应力应变图Fig.8 Insulated Arm’s Stress-Strain Diagram
5 树枝修剪机器人试验样机
根据上述分析和计算,设计并开发出树枝修剪机器人试验样机,并在吉林白山浑白线7号~8号杆塔档段处进行现场试验。试验内容包括验证树枝修剪机器人各运动关节的运动性能和验证树枝修剪机器人对带电线路走廊树枝修剪的可行性。

图9 树枝修剪机器人现场作业Fig.9 The Operating Site of BTR
现场试验时,树枝修剪机器人在220kV带电线路进行树枝修剪的作业状态,如图10所示。

图10 树枝修剪机器人末端执行机构现场作业Fig.10 The Operating Site of BTR’s End Effector
经试验,在220kV带电线路环境中,树枝修剪机器人各关节的运动性能良好,各机构耐压性能良好,修剪过后的输电线路走廊树枝与导线间距离大于4.5m,能够满足220kV带电线路走廊树枝修剪作业要求。
6 结论
(1)根据220kV输电线路走廊树枝与导线间距离标准,确定了具体详细的树枝修剪机器人作业区域,由此确定了树枝修剪机器人的构型参数,进一步建立了树枝修剪机器人的三维模型。
(2)在保证结构强度和刚度以及实际需求的前提下,利用遗传算法求得了绝缘组合臂质量最小的最优解,并利用ABAQUS对其进行了应力应变计算及模态分析,验证了设计的合理性。
(3)将树枝修剪机器人试验样机应用到吉林浑白线上进行树枝修剪作业,可以完成对输电线路走廊树枝的修剪作业,验证了树枝修剪机器人设计的合理性与实用性。
猜你喜欢
天然气与石油(2022年5期)2022-11-01
天然气与石油(2022年4期)2022-09-21
快乐语文(2021年11期)2021-07-20
中学生数理化(高中版.高考理化)(2021年12期)2021-03-08
意林(儿童绘本)(2019年3期)2019-04-04
北京航空航天大学学报(2017年10期)2017-04-20
山东青年(2016年3期)2016-02-28
小朋友·快乐手工(2015年5期)2015-06-06
航天返回与遥感(2014年4期)2014-07-31
导航定位与授时(2014年2期)2014-04-27
