
地面机动雷达水平及方位传感器的使用和标定*
2021-08-23 03:55冯玥
电子机械工程 2021年4期
冯 玥
(南京电子技术研究所,江苏 南京 210039)
引 言
地面雷达的机动性体现了雷达的快速部署能力和生存能力,雷达总体技术的发展也要求天线及天线车平台的姿态的各种实时测量数据日益精准。为保障雷达快速展开并高性能作战,雷达伺服系统必须提高或融合寻北仪、水平仪等传感器的应用精度,并使之容易设计,可靠安装,精确标定。然而如何正确运用高精度传感器,如何将个体传感器的精度与雷达的系统精度相融合,在实际使用中如何避免因使用不当导致的传感器的精度损失,是设计者必须面对的问题。本文以静态时的水平度和方位角度为例,说明了传感器使用中应该关注的问题,以及当其成为系统指标时与雷达联合标校的方法[1]。
1 水平度传感器的使用标校及补偿
1.1 水平仪的使用
本文所描述的水平度传感器专指静态水平仪(以下简称水平仪)。它分单轴和双轴两种,一般放置在雷达载车平台上或载车上安装的转动平台上。
实际使用中最为困扰的问题之一是:如果载车的刚性较差或载车平台较长较大,则调平数据只反映水平仪安放处的水平度,而实际载车平台有可能发生扭曲[2]。
这一问题可以通过合理配置单轴水平仪和双轴水平仪来解决。水平仪放置方式如图1所示,图中x,x1,x2表示载车宽度方向水平度,y表示载车长度方向水平度,虚线圆表示载车转台位置。水平仪放置方式根据实际使用的载车形式及载车可能发生的变形状态决定,可选用单一的双轴水平仪,也可选用一个双轴水平仪配一个单轴水平仪或一个双轴水平仪配两个单轴水平仪,甚至可以是更多个双轴或单轴水平仪的组合。
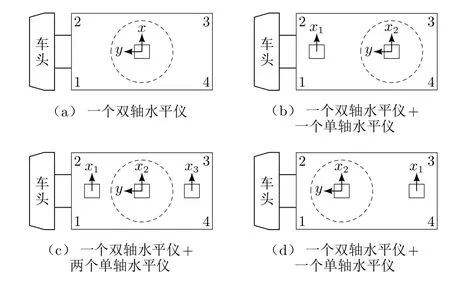
图1 水平仪放置方式
水平仪放置的一般原则是:
1)采用两轴的水平仪测量转台转动部分的水平值,确保转台的水平度满足要求。此双轴水平仪为主测量传感器,其精度直接影响调平精度指标,应该根据系统指标要求选择满足精度要求的双轴水平仪。系统的调平精度指标主要由双轴水平传感器的测量精度δ1和调平软件设定的门限δ2决定,即调平精度:

δ应小于系统调平精度指标。
2)合理选择单轴水平仪的放置位置,避免调平过程中及调平结束后载车平台的扭曲。尽管单轴水平仪为辅助测量传感器,但其精度选择也应与主测量传感器相匹配。一般情况下,单轴水平仪精度可比双轴水平仪精度略低。
1.2 系统水平度标校方法
如果系统采用多个水平仪,但不能保证其测量的是同一水平面,则调平控制失去了依据。在实际控制中,若不进行标定,则:1)如果载车平台具有特别好的刚性,则调平后载车易出现虚支撑;2)如果载车平台不具备较好的刚性,则尽管虚支撑概率减小,但会把扭曲面作为水平状态来使用。因此在调平控制前必须完成对载车水平度的标定。
由于天线载车安装面不是一块整体平板,结构比较复杂,传感器的安装又需要同时考虑紧凑防雨等要求,很难直接标定多个传感器是否在一个平行安装面上,因此,本文给出了一种比较实用的静态水平度标定方法:1)确定转动水平的标校基准面,其平整度应符合传感器安装要求。2)在雷达天线工作状态时,将高精度合像水平仪置于标校基准面上,选择自动调平时的角度位置为第一次测量位置,通过伸收调平腿调整载车平台的高低,使合像水平仪的测量为水平。3)转动转台,每隔30°(或更小的角度间距)进行测量和调整,最后回归至第一次测量位置,使得在整个圆周范围内,转台的水平度满足要求。4)通过承重传感器检测各调平腿的承载值也可验证水平度状况。如果载车重心设置合理,则在水平状态下天线转动一周的过程中,各调平腿的承载变化较小[3]。5)对双轴水平仪及单轴水平仪的读数进行补偿,使其显示为0°。一般软件上给出了补偿的范围,比如10′,若超出软件补偿范围,则应在结构上对水平仪的安装平面进行调整。
1.3 系统水平度补偿
系统水平度的补偿可以通过结构方式调整完成,如调整水平仪的安装平面等,也可以通过软件完成,将补偿值存储在可断电保存的Flash器件中,同时将这类出厂值放置在主控计算机的配置文件内,以备查询及系统复原。为避免Flash中存储数据丢失这类极小概率事件发生给系统精度带来的损失,系统的主要误差需要在结构上进行修正。例如,设计中应使安装水平仪的面在一个平面内,并能真实反映载车平台的水平度,对于小的修正补偿值,由于结构不好调整,可通过软件进行存储修正,同时控制系统应提供补偿值丢失报警提示。
2 寻北仪的使用标校及补偿
2.1 寻北仪的使用
目前寻北仪的种类很多,有挠性陀螺寻北仪、光纤陀螺寻北仪、激光陀螺寻北仪等,也有捷联模式或转位模式的动态陀螺寻北仪等。不同类型的寻北仪的用途不同,安装方式也各异,应根据不同陀螺的特点选择安装位置及安装方式。比如,普通的挠性陀螺寻北仪应安装在刚性较好的平台上,避免低频扰动对测量精度的影响[4]。
寻北仪主要用于转移阵地时自动测量雷达天线法线与正北的夹角。实现该功能的前提是寻北仪的指向边应与雷达天线法线平行,如图2所示。
在实际使用中,很难实现寻北指向与天线法线指向绝对平行,安装完毕后,两者之间存在固定误差,必须通过方位标定进行消除。雷达架设展开并转动时,所有方位轴角转换值均应去除该固定误差,才是修正后的雷达方位角度。以安装在平台上而非转台上的寻北模式为例,对于只在图2所示的固定位置寻北的自动修正方式,修正算法为:

图2 运输位置寻北示意图

式中:γ为修正角度;Φ为修正前的实时的轴角数字转换器(Resolver-to-Digital Converter,RDC)值;B为寻北角度;ε为寻北误差消除角度;y为寻北时RDC原码(寻北时修正前的RDC值,在该位置Φ=y)。
如果雷达展开转动至图3所示的位置,此时寻北仪的指向与天线法线指向不一致,这种情况下要实现雷达任意位置寻北,则还需对雷达方位轴角转换值进行标定,使得当天线法线指向与寻北仪指向相同时,对应方位轴角转换值为0°。
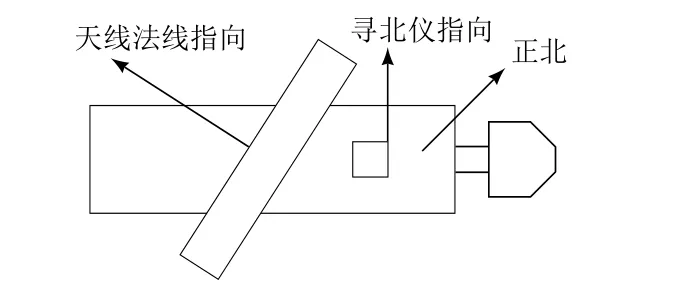
图3 任意位置寻北示意图
对于任意位置寻北的自动修正方式,修正算法为:

式中,ε′为寻北合并轴角误差消除值。
2.2 系统方位标校方法
系统方位标定通过两个步骤完成。
(1)步骤一
在厂房内完成对雷达阵面法线方位的标定,即阵面机械轴的标定。标定的作用是找出ε或ε′,标定方法与自动修正的算法相关。
使用式(2)的固定位置寻北的标定方法如下:1)首先雷达天线在可寻北位置展开并锁定,第一次ε取0值,启动自动寻北及修正功能,读取修正后伺服显示的雷达方位角度γ(即B值);2)对天线阵面进行贴标后,通过高精度陀螺测量仪测出雷达天线法线与正北的夹角Ψ[5];3)计算Ψ-γ,此值即为ε值,存入Flash;4)在此位置再次启动寻北及自动修正进行验证,确认γ与Ψ是否一致,如果两者差值在允许的精度范围内,则标定完成。对于上述固定位置寻北模式,在出厂时手动输入并保存一次ε值,在寻北时自动保存(B+ε)-y值。
使用式(3)的任意位置寻北的标定方法如下:1)首先雷达天线在任意可锁定位置展开,读取修正前伺服显示的雷达方位角度Φ,即此时的RDC原码;2)第一次ε′取0值,启动自动寻北及修正功能,读取寻北角度B;3)对天线阵面进行贴标后,通过高精度陀螺测量仪测出雷达天线法线与正北的夹角Ψ;4)计算Ψ-B-Φ,此值即为ε′值,存入Flash;5)在此位置再次启动寻北及自动修正进行验证,确认γ与Ψ是否一致,如果两者差值在允许的精度范围内,则标定完成。对于上述任意位置寻北模式,也可以采用调整旋转变压器轴位置以使Ψ与修正后RDC值相等的方法,只在寻北时自动保存B值。
(2)步骤二
在外场完成雷达阵面电轴和机械轴夹角的标定,并完成补偿。其标定方法如下:1)在外场与雷达有一定距离的标校塔上放置一信号源,雷达接收信号源的信号,调整雷达方位角度直至所接收的信号最强,锁定雷达方位作为标定状态,读取此时伺服显示的雷达方位角度α,如图4所示。2)通过高精度陀螺测量仪测出高塔上信号源至雷达中心点连线与雷达机械轴的夹角θ,假设电轴偏向如图5中实线所示,则在软件上补偿-θ即可,补偿后的实际方位角度为α-θ。3)在实际的标定中不容易将雷达天线恰好定位至信号最强处。对于具有电扫功能的雷达,可停在信号最强附近,如图5中虚线所示,读取此时伺服显示的雷达方位角度α1,通过电扫获得当前偏离最强信号的角度X,通过高精度陀螺测量仪测出高塔上信号源至雷达中心点连线与雷达机械轴的夹角β, 则软件上计算补偿角度的公式为:
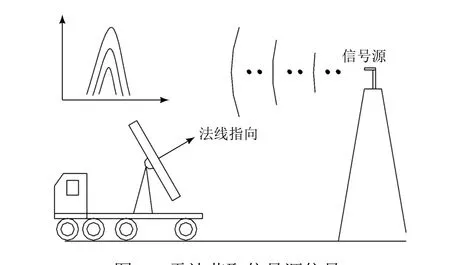
图4 雷达获取信号源信号
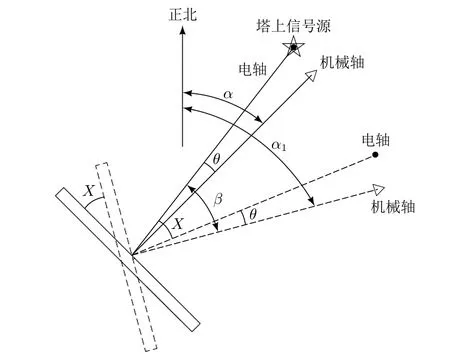
图5 电轴标定图解

补偿后的实际方位角度为α1-θ。
2.3 系统方位值补偿
由上述分析可知,系统的方位补偿由多个部分组成,主要源于以下的系统固定误差:1)寻北位置寻北指向与雷达阵面天线法线(机械轴)不平行带来的误差;2)雷达电轴和机械轴不重合带来的方位定向精度误差;3)任意位置寻北时方位轴角转换值不能完全归零导致的误差等。一般电轴和机械轴的固定误差由雷达主控软件补偿修正,其他固定误差由伺服系统以配置文件形式存储在Flash中,以备查询及系统复原。结构设计时,应使所有补偿值越小越好,对于需要软件保存的值,控制系统应提供补偿值丢失报警提示[6]。
3 结束语
本文所描述的静态水平仪、寻北仪等设备的使用,与系统的结构有着紧密的关系,充分了解它们的特点,合理设置、正确标定,可以消除系统的固定误差,充分发挥它们的性能。随着水平测量技术和惯导技术的发展,动态水平仪和高精度惯导设备在雷达系统上的使用日益广泛,此类设备与雷达系统的标校更为复杂,有待专文描述。
猜你喜欢
汽车实用技术(2022年6期)2022-04-02
今日自动化(2021年6期)2021-09-03
建材发展导向(2021年13期)2021-07-28
建材发展导向(2021年13期)2021-07-28
质量技术监督研究(2018年6期)2019-01-15
装备制造技术(2018年6期)2018-08-04
山东工业技术(2018年10期)2018-06-26
测绘工程(2018年1期)2018-01-09
制造技术与机床(2017年8期)2017-11-27
电子机械工程(2016年3期)2016-09-07
