
基于CA 模型下自动驾驶汽车对交通堵塞影响的仿真模拟
2021-08-23 07:15章子皓虞千迪
科学技术创新 2021年23期
潘 昊 章子皓 虞千迪
(南京信息工程大学大气物理学院,江苏 南京 210044)
1 背景介绍
1.1 问题背景
随着科学技术的发展、生产力的提升与人们消费水平的提高,自动驾驶汽车在公路中占交通流的比重越来越大。由于道路交通容量有限,每日高峰期通常会出现拥堵情况,而机动车汽车之间的协作作用将为影响交通流的主要因素。随着未来自动驾驶技术的普及,人工驾驶-自动驾驶汽车之间的协作作用将为影响交通流的主要因素。为此,本文从交通流机理出发,建立了一种元胞自动机模型,并对美国各公路不同车道数的情况进行了模拟。
1.2 基本假设
1.2.1 不考虑突发性交通事故造成的公路堵塞效应。
1.2.2 假设人工驾驶汽车的驾驶决策与操作执行仅与驾驶员的判断和心理状况有关。
2 模型构建
2.1 模型定义
为了对速度改变和换道策略进行讨论,我们定义同一车道上两车的实际距离Dreal。同时,定义同一车道的安全距离Dsafe。安全距离是指当其前方车辆紧急刹车时为了避免发生追尾碰撞,应当保持的安全的车间距,其计算公式为:

式中,Dsafe表示两辆车之间所需要的安全距离。xn(t)表示车辆n 在t 时刻所处位置。xn+1(t)表示车辆n 在t 时刻其前方车辆所处位置。l 统一表示车辆的长度,λ 表示观测反应时间,d 表示车辆的常规减速度。vn(t)为车辆n 在t 时刻的行驶速度,同理,vn+1(t)表示车辆n 在t 时刻其前方车辆的速度。
2.2 人工驾驶汽车与自动驾驶汽车反应时间参数的确定
假定人与自动驾驶系统对前车实际距离的信息观测速度相同,那么人工驾驶汽车与自动驾驶汽车的区别主要在于(1)式中λ 取值。我们取人的反应时间为0.4s,接收路况信息后操作时间为0.35s,那么人工驾驶汽车λ 为0.75s。
自动驾驶车辆的观测反应时间λ,

式中,Kn是操作对象n 在持续横纵向车辆控制中观测反应时间,En是操作对象n 在物体和事件探测响应的反应时间,Hn为操作对象n 动态驾驶任务支援接管的反应时间。不同自动驾驶等级汽车的观测反应时间如表1 所示。

表1 自动驾驶汽车观测反应时间
本文我们所讨论的自动驾驶汽车,均视为l4级别。
2.3 车辆的换道策略
定义换道决策车辆相邻左侧道路的投影与前车的实际距离为Dlf-real,与后车实际距离为Dlb-real;同样定义,换道决策车辆相邻右侧道路的投影与前车的实际距离为Drf-real,与后车实际距离为Drb-real,并用Dlf-safe、Drf-safe、Dlb-safe、Drb-safe分别表示相应的安全距离。换道策略及其判断步骤为:
2.3.4 若符合条件2.3.1、2.3.2、2.3.3,则车辆考虑换道,并基于安全距离考虑向左右相邻车道移动的决策,

定义换道概率P 为在满足换道策略条件下,执行换道的概率。自动驾驶汽车在计算出满足换道策略的情况下,通常会选择执行换道操作。这样,自动驾驶汽车的换道概率PA=1。
公路上换道的概率与前车有关,当前车达到公路限制速度时,后车基本不会执行换道,而前车速度与公路限制速度之差越大,后车执行换道的概率也越大,公式如下:

2.4 参数标定
为了能在仿真模拟的过程中给出更精确的结果,需进行模型标定。模型参数标定可以抽象为一个求非线性规划最优解的问题。

式中,Fobj为目标函数,为车辆形式状态(速度、位置、加速度等)的函数,v,x,a 分别是车辆的速度、位置和加速度,p 为需要进行标定的参数,h1(p)是有关p 线性约束,gj(p)是非线性约束,nh和ng是线性和非线性约束条件的数量。
目标函数Fobj采用Theil'sU 函数,

式中,aireal是真实的加速度,aisim是模型中仿真的加速度,仿真模拟中车辆的编号为i。模拟宽度为12 英尺的多车道情况,每个元胞(网格)长度取为5m,则仿真中车身长取为5m,占据1个网格点。参数标定结果如表2 所示。

表2 自动-人工驾驶仿真模型参数标定取值
2.5 仿真步骤
根据以上分析,自动驾驶汽车和人工驾驶汽车在公路上的仿真过程如下:
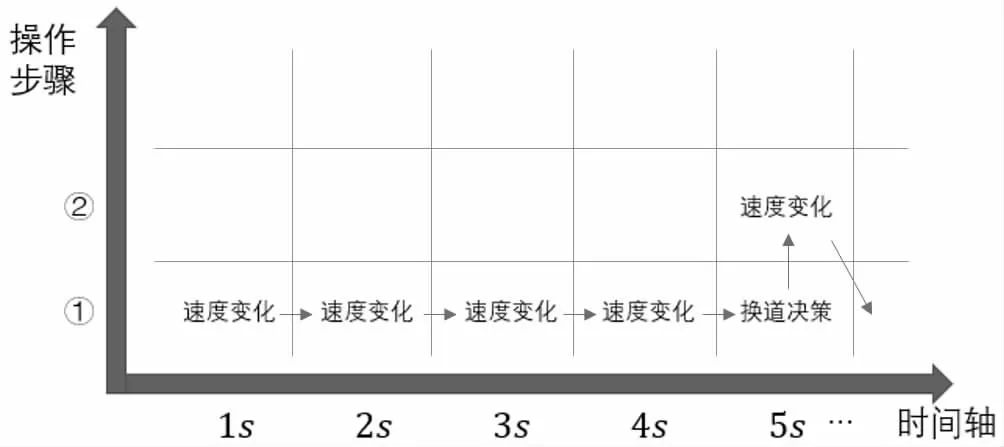
图1 仿真周期步骤
采用周期性边界,初始状态下N 辆车随机分布在道路上,N辆车的初始化速度设置为v=90km/h,那么交通流在t 时刻的平均速度为
仿真每一次运行演化50 时间步长,记录时间步演化完成后所有车辆的速度,求得每一时步内车辆的平均速度,最后将得到的速度值再作时间平均,得到平均速度v(t)。这也是仿真最常用的分析方法之一。
3 模拟结果与讨论
本文对美国5 号公路,90 号公路,405 号公路与520 号公路进行了仿真模拟,用某路段上车辆的平均速度是否小于20m/s来衡量该路段的拥堵情况。根据模拟的数值结果可知,5 号公路里程104.81——105.63 段(与101 号公路交汇处),在上行方向自动驾驶占比90%时,平均速度为19.79314m/s,该路段出现拥堵情况;5 号公路(131.35,132.89)与16 号公路交汇,在下行方向上自动驾驶占比10%、50%、90%均拥堵;5 号公路(135.32,136.51)中167 号公路汇入,在上下行方向上均拥堵;5 号公路(152.72,155.18)及(164.22,165.29)分别于405 号公路和90 号公路交汇,发生严重拥堵,平均速度为16.37284m/s;520 号公路(6.93,9.60)与405 号公路交汇,同样发生严重拥堵,平均速度为15.78389m/s。90 号公路与405 号公路在与其他路段的交汇中并没有出现拥堵情况,平均速度为27.84723m/s。
综合以上分析,路段的拥堵程度与车道的数量没有明显的关系,而与路段的交汇与汇入与拥堵有关,尤其当两段道路本身已经接近拥堵的情况下,交汇将使得拥堵情况变严重。而当人工驾驶汽车与自动驾驶汽车协作时,自动驾驶汽车占比的增加有助于降低道路的拥堵程度。
猜你喜欢
中国交通信息化(2022年9期)2022-10-28
中国交通信息化(2022年5期)2022-07-23
科学与财富(2021年33期)2021-05-10
初中生学习指导·提升版(2020年9期)2020-09-10
计算机系统应用(2019年6期)2019-07-23
汽车零部件(2018年5期)2018-06-13
中学生数理化·八年级物理人教版(2016年8期)2016-12-24
汽车文摘(2014年2期)2014-12-14
建材发展导向(2014年2期)2014-05-04
初中生世界·八年级物理版(2013年1期)2013-03-25
