
玫瑰采摘机器人的简要设计
2021-08-07 04:11吴汶奇周建平
绿色科技 2021年14期
吴汶奇,周建平
(新疆大学 机械工程学院,新疆 乌鲁木齐 830047)
1 引言
随着生活水平的提高,人们对玫瑰精油、玫瑰化妆品、玫瑰保健品、玫瑰饮料[1]等产品需求日益增大,现在国外和国内主要是依靠人力采摘。这种采摘方式效率低,成本高,采摘花朵质量参差不齐且受环境天气影响,而本文设计的自动采摘机器人以Raspberry Pi微型电脑为主控,搭载AI人工智能识别系统,实现颜色识别追踪与自动采摘,可以全天候,全时段进行采摘,不受天气和环境的影响。
2 系统设计
该机器人由执行机构、驱动传动系统、控制系统和AI自动识别系统4部分组成。其原理可以概括为摄像头收集信息,识别系统判别信息,控制系统处理信息并发出指令,指挥执行机构进行运动进给,当机器人要转移位置时,驱动传动系统提供动力带动系统整体前进。
2.1 执行机构的组成
执行机构由履带式行走器、基座、机械臂、末端执行装置组成。
2.1.1 履带式行走器
由履带式底盘组成,该底盘具有重心低,驱动稳定等优良特点。行走装置主体由不锈钢组成,保证在固定上坚实可靠。履带中有2个驱动轮和6个承重轮。驱动轮的驱动电机可以提供最大13.5 kg扭矩,确保有效载荷在10 kg左右。同时,驱动电机上配有高低电瓶磁性霍尔编码器,从而为后期开发更多功能留下了空间。
2.1.2 基座
基座是整个采摘机器人机械臂的支撑,用来联接机械臂、驱动装置、Raspberry Pi微型电脑和AI识别系统。为保证机器臂运行的稳定性,其主体基座将使用实心铸铁,该基座最下端将与履带式行走器相接。
2.1.3 机械臂
机械臂由大小臂构成,大臂长130 mm,小臂长90 mm,有2个自由度,即伸缩回转,俯仰或升降。机械臂采用合金材质,确保有足够的承载能力和刚度,同时较轻的重量能增强机械臂采摘的精度和平稳性。
2.1.4 末端执行装置
机器人的手又称为末端执行装置,它使机器人直接用于采摘操作的部件。它具有模仿人手动作的功能,并安装于机器人手臂的前端。由于本装置是对玫瑰花进行夹取,因此本文选用的是夹钳式取料手,该执行装置由一个舵机,一对齿轮,一对夹取爪组成,其中夹取抓最前端装有一对刀片,在夹取时将玫瑰的茎切断,防止采摘花朵时对玫瑰植株造成损伤。抓取果实的机械臂由数字舵机与支架构成,数字舵机发送一次 PWM 信号就能锁定角度不变,而且可以通过上位机软件与舵机控制板通信直接调节舵机角度,在利用舵机控制 板控制舵机时,注意电源供电不足,会引起舵机乱动,或者舵机不受控。供电不足表示电流不够,不是电压不够,而且舵机控制板是个辅助工具,只能接收单片机发送的命令,或者执行事先设置好的命令,不能对其编程只能作为一 个 驱 动 板。在与单片机通信时,要严格按照所用舵机控制板的协议来通信,否 则,可能损坏舵机控制板或者舵机。在给舵机控制板通电时,舵机可能会乱动,这是上电复位的情况。可以在电脑上先设置一个简单的动作组,并且用上位机软件设置为脱机工作,这样就可以解决舵机在刚通电时乱动的问题[2]。
2.2 驱动装置
驱动系统采用13.5kg扭矩的直流步进电机驱动的方式为机器人履带行走提供动力。同时霍尔电机保存了编码输入功能,在保证机器人可以向任何方向、任何角度进行移动的前提下,为后期扩展留下了空间。
2.3 AI自动识别系统
AI自动识别由摄像头hv3808负责,该摄像头是COMS的传感类型,拥有30万个动态像素,能提供480P、30PFS高清晰度延迟图像,可将拍摄到的照片以最低0.1LUX传到Raspberry Pi微型电脑Open Source CV图像处理库,通过Al视觉算法来定位需要采摘的玫瑰花朵,然后向控制系统传输PWM脉冲,反馈识别结果。
2.4 控制系统
控制系统是人们向机器人发出各种指令,让其按照要求完成各种任务的装置[3]。本机器人采用Raspberry Pi微型电脑为主控,搭载AI人工智能识别系统和GPS定位系统,控制机器人按规定的程序运动,把接受的指令信息存储起来,然后对各末端操作器发出指令,让机器人自动识别需要采摘的玫瑰花朵,采摘后放入指定的容器中,一个区域采摘结束后,按照设定的路线对下一个区域进行扫描识别(图1)。
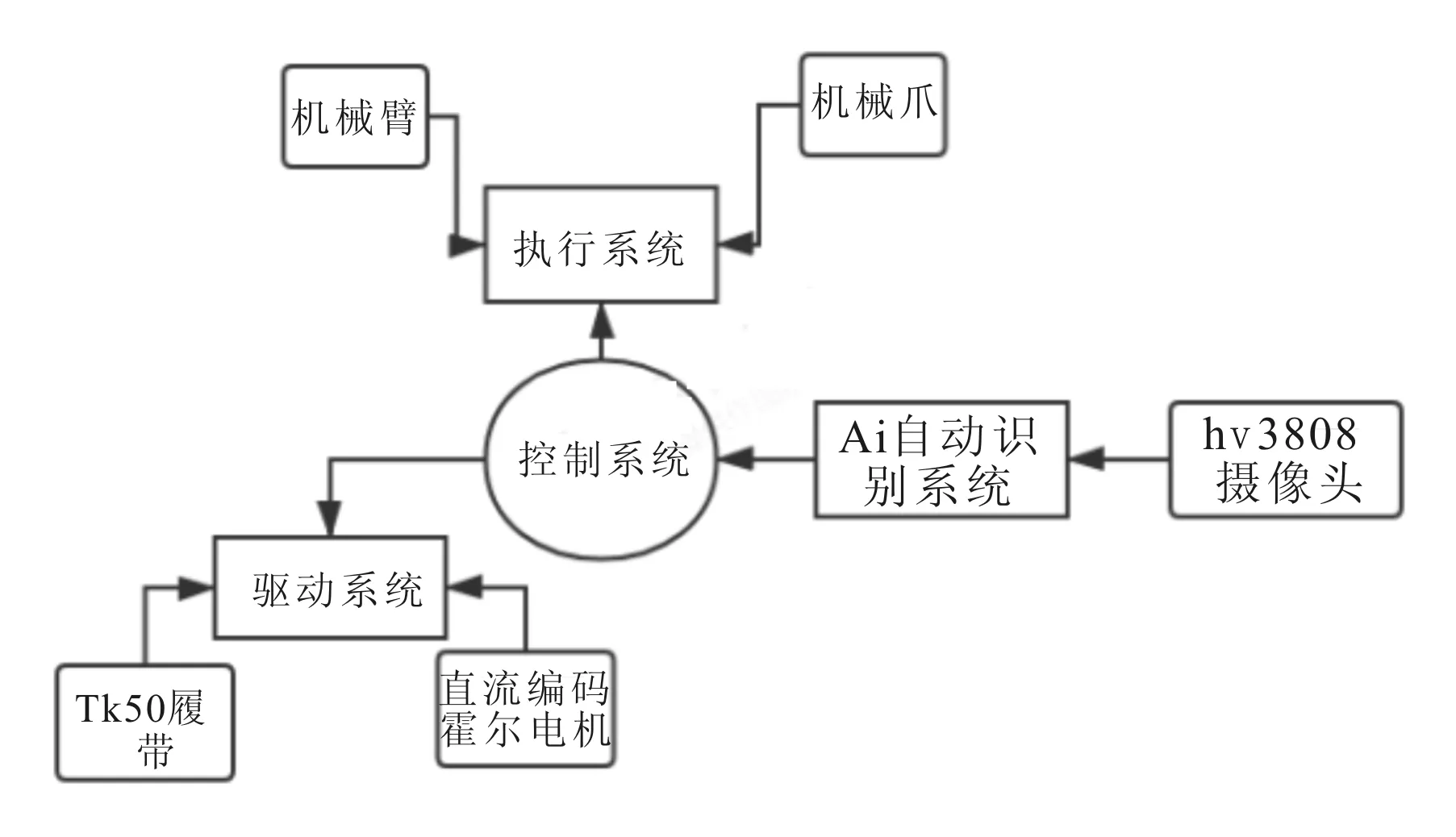
图1 控制系统图
3 运动学算法
由于机械臂的采摘运动是由各个关节部位的旋转、平移所构成,因此解决关节的运动学算法,就可以完成机械臂的采摘进给运动。
3.1 坐标系的选择
笛卡尔坐标系是目前常用的描述速度、加速度、角速度的空间坐标系,因此在该算法中选择笛卡尔坐标系。当绕一个轴旋转多少度时用右手定则来判断。
3.2 平移和位移
位置是使用一个三维向量来表示,平移变换是坐标系空间位置的变换,可以用坐标系原点О的位置向量表示,如图2所示。多次平移变换也很简单,向量之间直接相加就可以求空间中一个点的位置在经过平移变换后的坐标系{B}中的坐标。
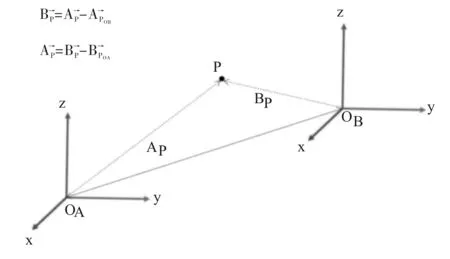
图2 平移变换图
3.3 角度、方向、旋转变换
表示一个物体的三维位置和朝向,通常都会在物体上提前建立一个跟着它转动的坐标系,然后通过描述这个坐标系与参考坐标系的关系来描述这个物体[4]。一个物体在坐标系中的位置和朝向的变化,可以认为是两个参考坐标系之间的关系。这里讲角度、方向表示法,只要讲两个坐标系之间的关系就可以了。要知道一个坐标系相对于另一个坐标系如何旋转、旋转了多少,可以从二维角度先分析(图3)。
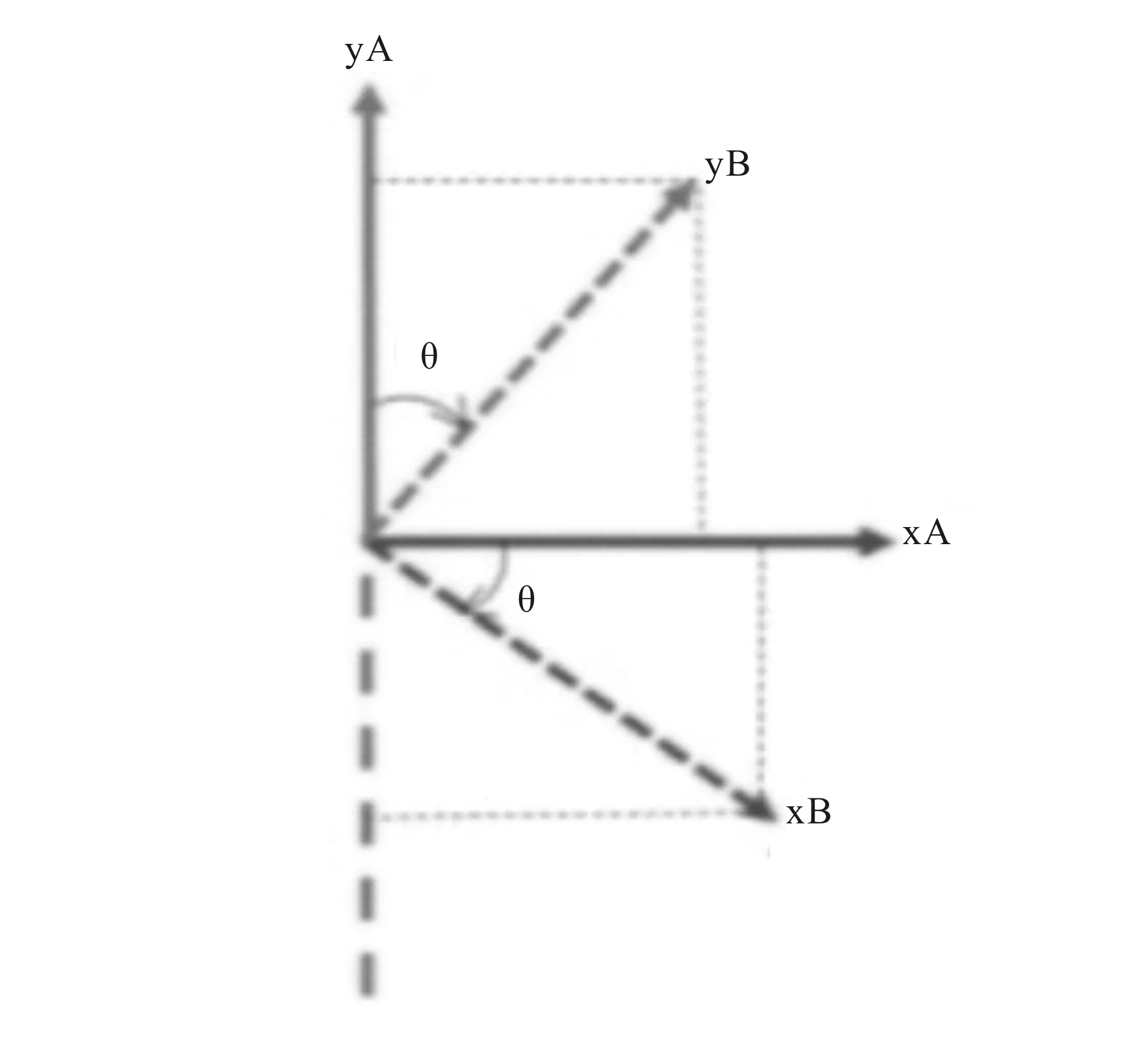
图3 旋转变换图
3.4 旋转矩阵

3.5 正运动学
需要用一系列参数来表达两对关节连杆之间位置角度关系的机械臂数学模型,因此选用DH 4个参数。这4个参数分别是:
(1)link length(连杆长度):两个关节的轴(旋转关节的旋转轴,平移关节的平移轴)之间的公共法线长度。
(2)link twist(连杆扭转):一个关节的轴相对于另一个关节的轴绕它们的公共法线旋转的角度。
(3)link offset(连杆偏移):一个关节与下一个关节的公共法线和它与上一个关节的公共法线沿这个关节轴的距离。
(4)joint angle(关节转角):一个关节与下一个关节的公共法线和它与上一个关节的公共法线绕这个关节轴的转角。
机器人在运动时需要一个参考系,为其关节进行的运动作为参考[5],因此需要在x,y,z三个坐标轴中挑选出一个作为其参考轴。
以Z轴为例,当关节开始进行旋转运动的时候,用右手定理来进行判断方向,而绕z轴旋转的角度是一个实时变化的量;当关节做滑动运动的时候,那么z轴的方向即是沿直线滑动的方向,沿Z轴的连杆长度d是关节变量。同理x,y也一样。确定好坐标系后,用新的方式表达4个参数:
(1)link length(连杆长度)a-1:沿Xi-1的Zi-1到Z的距离。
胜德(苏州)密封系统有限公司是一家成立于2009年的德国独资公司,是聚合物密封、胶粘和浇注系统、供料设备、自动化及应用服务领域的知名系统供应商,在行业内处于世界领先地位。产品主要应用于汽车、机柜、过滤器、电子及照明等行业。胜德总部位于德国科隆,在美国、意大利和西班牙等国家都设有分公司。
(2)link twist(连杆扭转)ai-1:Z相对于Zi-1.绕Xi-1旋转的角度。
(3)link offset(连杆偏移):沿Z的Xi-1到Xi的距离。
(4)joint angle(关节转角):X相对于Xi-1;.绕Z旋转的角度。
然后根据各关节的旋转矩阵得到总体的末坐标方程:
通过输入x,y坐标,配合摄像头的俯视角度,可以得到舵机的旋转角度。
3.6 机械臂抓取
3.6.1 静止抓取
物体在视野中处于静止状态,通过计算机捕捉图样,反馈到中控处理器中,之后通过上述运动学算法,驱动舵机旋转,夹取相应的物块。
3.6.2 运动物体夹取
由于在实际环境中,会有风的影响,夹取时物体不是静止的,因此具有移动夹取功能是十分重要的。按照不同的速度移动小物块,测量反应时间和成功率,每组实验重复1000次以上(表1)。
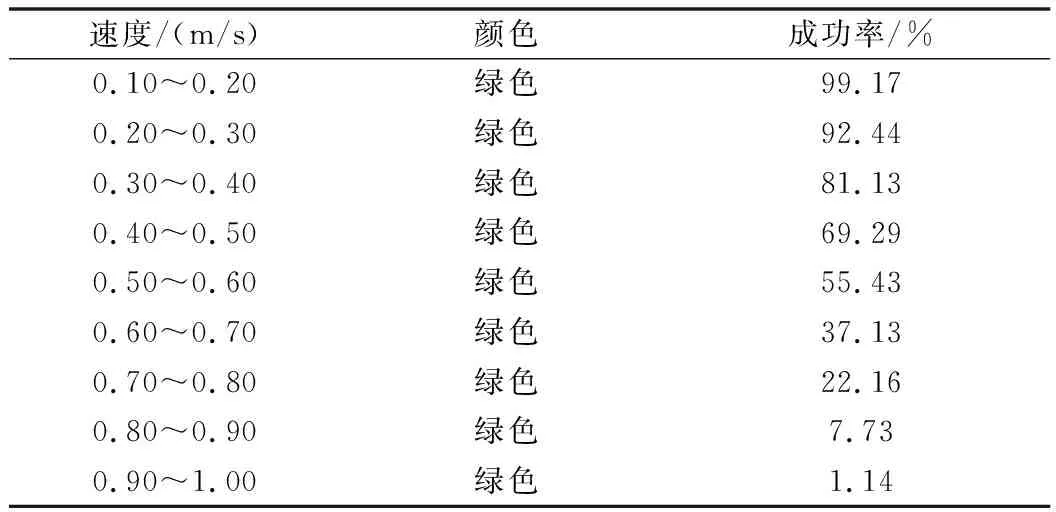
表1 机械臂抓取成功率测试统计
通过表1实验数据,可以观察发现在一般的风速条件下,成功率是在80%以上,性能相对非常稳定。
4 结论
本文阐述了玫瑰采摘机器人的组成、机械臂运动学算法原理和设计方案。该机器人能根据人们的需求选择性采摘玫瑰,极大程度替代了人工采摘,提高了采摘效率,对玫瑰精加工无益是革命性进步。
随着玫瑰采摘水平需求增高和科学技术的发展, 5G的应用,玫瑰采摘机器人智能化[6]的设计也变得越来越重要。这需要在设计与应用方面要有前瞻性,更多地使用现代科学技术,设计出效率更高、实用性更强的智能玫瑰采摘机器人。
猜你喜欢
农业装备与车辆工程(2022年5期)2022-10-31
科技信息·中旬刊(2018年9期)2018-10-21
教育教学论坛(2017年34期)2017-08-30
中国科技纵横(2017年13期)2017-08-09
航空模型(2016年5期)2016-07-25
航空模型(2015年6期)2015-10-21
中国信息技术教育(2014年5期)2014-03-17
