
基于车辆与车辆的车联网分布式协同感知定位
2021-07-31 12:41谯小康屈小媚
控制理论与应用 2021年7期
谯小康,屈小媚
(西南民族大学计算机系统国家民委重点实验室,四川成都 610041)
1 引言
随着城市化进程的不断推进,车辆基数的高速增长导致交通问题日益突出.车辆定位技术作为智能交通系统的核心技术,受到国内外学者的高度重视[1].基于车联网的定位技术主要包括差分定位[2](differential positioning,DP)技术与协同定位[3](cooperative positioning,CP)技术.由于多路径效应[4]的存在,在城市环境下DP技术无法实现定位精度提升,文[5]中的实验结果也验证了这一结论.图1展示了一种GPS(global positioning system)卫星信号受到多路径效应导致反射、阻隔的场景.协同定位是近几年来国内外研究热点[6–8].基于车联网的协同定位是指车辆通过车路协同系统(vehicle to everything,V2X)进行信息交换融合定位,其通信方式主要包括车辆与车辆(vehicle to vehicle,V2V)、车辆与路边节点(vehicle to infrastructure,V2I)以及车辆与行人(vehicle to pedestrian,V2P),融合的信息包括到达角度(angle of arrival,AOA)、到达时间(time of arrival,TOA)、接收信号强度(received signal strength,RSS)、载波频率偏移(carrier frequency offset,CFO),或这些测量的混合[9–11].协同定位并不局限于车辆应用,也已被应用于其他具有或不具有移动性的传感器网络[12–14].
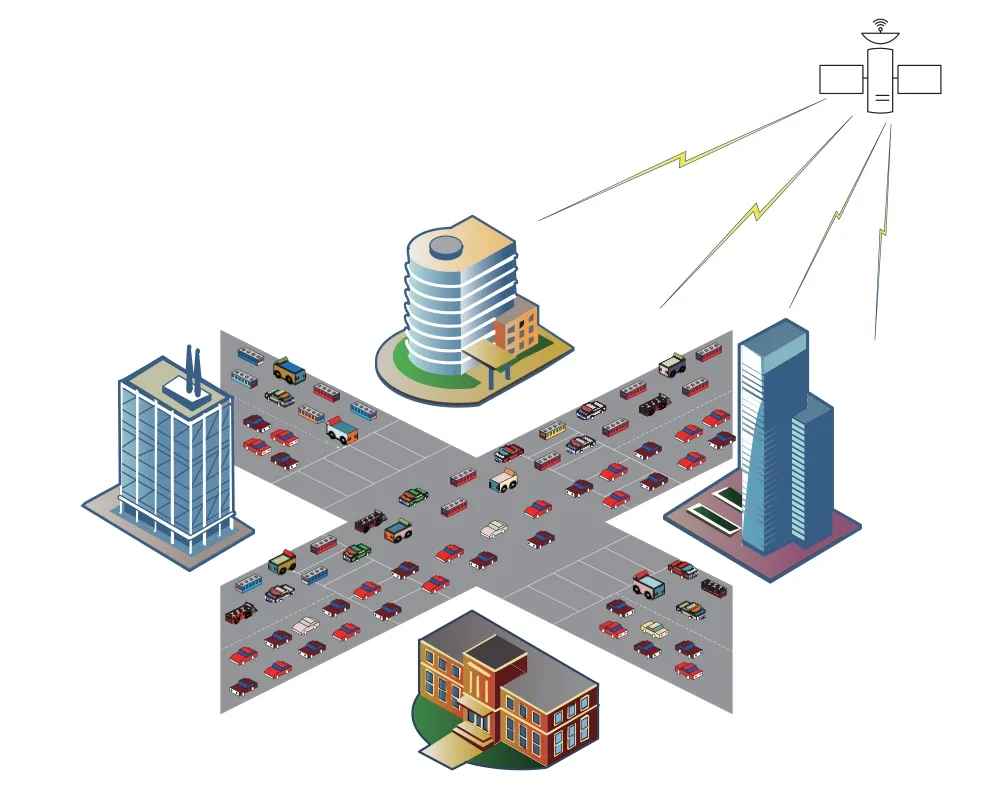
图1 多路径效应场景Fig.1 Multipath effect scenario
为处理GPS多路径问题,基于车联网V2X通信的协同定位可有效增强GPS的定位精度[15–17].文[17]中,待估车辆利用V2X来获取辅助车辆以及路边节点的位置信息,采用3个滤波器结构,选取最优效果作为主滤波器,一定程度上改进了车辆定位精度.然而,该方法路边节点位置信息丢失时定位性能一般,且采用3个滤波器造成计算资源浪费.另一方面,依赖于V2I通信的协同定位需要沿路安装基础设施,其成本过高不易实现.最近,文[18]提出利用V2P测得车辆到行人的距离信息,从而改进GPS的定位精度.然而,由于行人是非协作地被动定位,在行人数量较多的情况下,难以对V2P观测进行准确的数据关联.
因此,本文考虑在基于V2V的车载自组织网络中,利用GPS、航位推算DR(dead reckoning)以及车辆之间的TOA测量进行分布式协同定位.DR是一种独立定位技术,它依靠传感器来获取车辆的位移和航向等信息,成本低且易于实现,其定位误差随着时间推移不断累积[19]与GPS有很强的互补关系.在V2V场景下对于每个车辆而言,既是待估车辆,同时又是其他车辆的辅助车辆.由于TOA是非线性测量,一些方法用扩展卡尔曼滤波(extended Kalman filter,EKF)来预处理TOA观测[20],以获得动态定位.然而,由于EKF基于非线性系统的一阶泰勒近似来传递观测的均值和协方差,在一阶近似误差较大的情况下,其定位性能不能取得很好的效果.
无迹卡尔曼滤波(unscented Kalman filter,UKF)[21]是另一种广泛应用的非线性滤波方法.UKF 的基本原理是无迹变换(unscented transform,UT).首先生成一组sigma点,然后将系统非线性函数应用于每个sigma点,得到变换后的向量.最后,变换向量的样本均值和样本协方差给出真实均值和协方差的估计.理论上,如果系统非线性函数完全确定,即不含未知变量,UKF能达到非线性系统的二阶近似精度.
然而,在本文的V2V协同定位场景中,TOA测量函数既是待估车辆位置的非线性函数,也是辅助车辆位置的非线性函数.辅助车辆的真实位置是未知的,因此非线性TOA测量函数包含未知的随机参数,转换sigma点的步骤不可直接实现.克服这一困难的传统UKF方法是在转换sigma点过程中直接使用GPS观测.注意到GPS观测存在观测误差,这将导致相应的无迹变换中的误差增大,特别是在GPS定位误差较大的情况下.
文[22]提出了一种改进的UKF算法,通过将随机参数扩维到状态向量来提升算法性能.理论分析证明,在非线性系统中噪声概率密度函数是正态分布的情况下,通过改进的UT变换得到的近似均值和协方差具有三阶近似精度.因此,本文将辅助车辆的位置信息作为随机参数扩维到状态向量,建立扩维后的运动模型.在相应的改进无迹变换中,由于状态向量的维数增加,使得sigma点的数目增大.此外,每个改进的sigma点都包含待估车辆状态和辅助车辆的位置,因此在转换sigma点的步骤中,非线性TOA测量函数不再含有未知参数.虽然改进的UKF方法具有更高的计算复杂度,但与传统UKF方法相比,其估计性能明显提高,如Monte Carlo仿真所示.
论文的其余结构安排如下,第2节描述了车联网的分布式协同定位模型.第3节介绍了传统UKF与改进UKF下的协同定位算法.第4节提供了车辆直线行驶下和环线行驶下的Monte Carlo数值模拟结果,第5节给出了本文的结论.
2 车联网协同定位模型
考虑某段道路上的车载自组织网络由n个车辆节点组成,每个车辆都可通过车载自组织网络与辅助车辆进行V2V实时通信.一个典型的协同定位场景如图2所示.考虑各车辆利用GPS,DR以及车辆之间的TOA测量进行协同定位.文献[23]指出基于TOA的二维目标定位需要至少3个辅助平台,因此本文假设车辆的数量n≥4.假设各车辆的真实位置分布在一个二维平面上,车辆i(i=1,···,n)在k时刻的状态向量记为,其中符号“′”表示转置,和分别表示车辆位置与速度矢量,为其加速度.
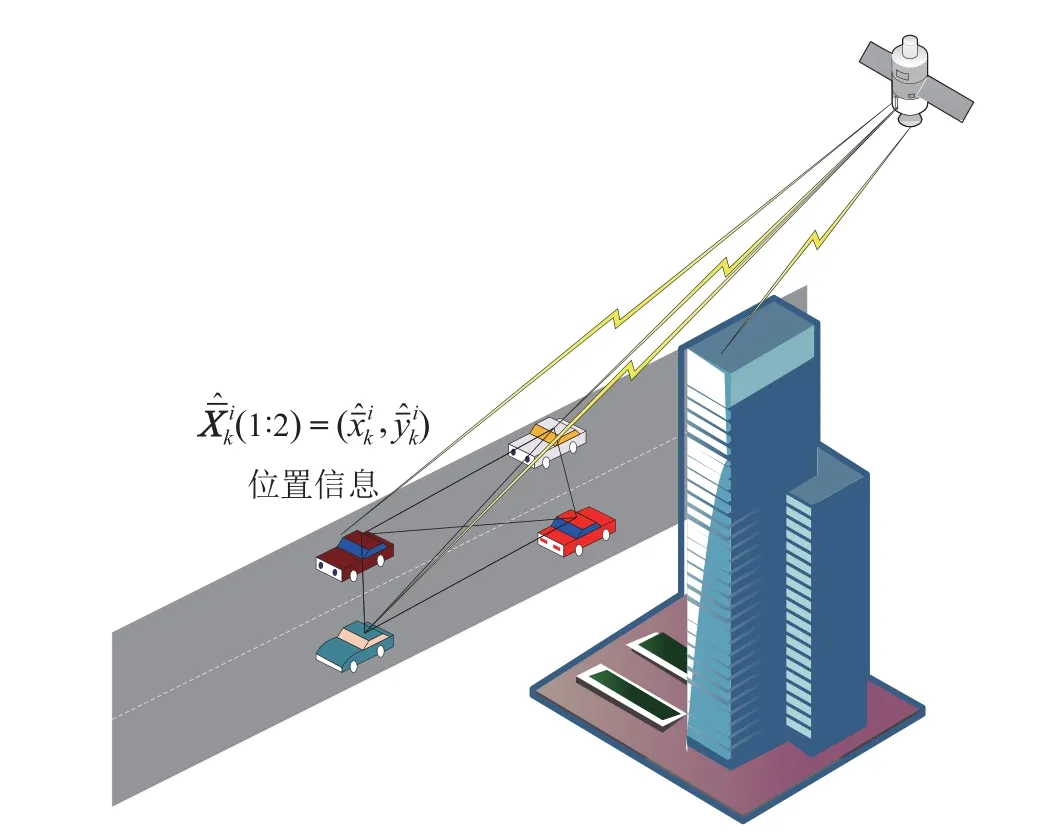
图2 车辆协同定位场景Fig.2 Vehicle co-positioning scenario
本文所涉及的公式符号较多,为方便阅读给出了如表1所示的部分符号说明.

表1 符号说明Table 1 Symbol description
实际应用中,每个车辆的真实位置信息均未知,但可通过GPS卫星导航系统得到位置信息的一个实时观测,其观测模型为

另一方面,各车辆自带的惯性导航系统可用于DR航位推算.基于DR和GPS信息融合的车辆定位可以描述为如下的线性系统

其中:矩阵F,G为状态方程参数,观测矩阵

向量ωk−1是零均值高斯白噪声,其协方差矩阵记为.该线性系统可直接应用著名的Kalman滤波算法进行迭代预测.
本文的目的在于,在车辆GPS观测和DR动态运动模型的基础上,结合车载自组织网络中的TOA观测和V2V 信息传输,实现各车辆动态定位精度的提升.在下文中,对待估车辆l的状态记为,其辅助车辆i(i≠l)的位置信息为.
待估车辆l与辅助车辆i之间的TOA观测数学模型可以描述为

其观测误差向量的协方差矩阵记为Qt.
本文考虑对车载自组织网络中的每个待估车辆l,利用测距雷达获取其辅助车辆的TOA 观测,利用V2V信息传输获取辅助车辆的位置信息,并结合自身的DR动态运动模型,来设计一种改进的无迹卡尔曼滤波器.该滤波器的创新点在于充分考虑了辅助车辆位置的不确定性,从而提高滤波性能.
各车辆节点均利用本文提出的改进无迹卡尔曼滤波器进行分布式计算,得到自己及其辅助车辆的位置估计,然后各车辆将计算得到的估计值通过V2V通信进行信息传输,其信息传输方式如图3所示.
图3给出a,b,c3辆车在协同定位过程中的信息流向,图中实线表示k −1时刻的信息流向,3辆车两两互相传输信息,i=a,b,c,其中为k −1 时刻车辆i的位置估计,为k −1时刻车辆i的位置估计的协方差矩阵.
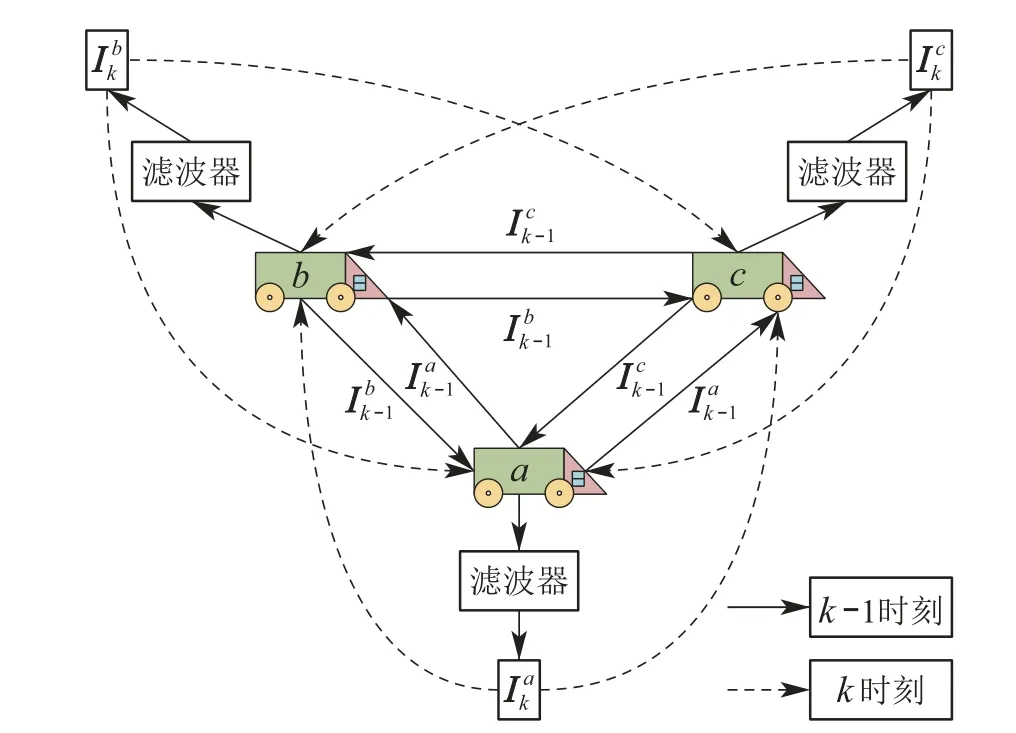
图3 车辆协同定位信息流向Fig.3 Information flow of co-positioning
每辆车将收到的信息通过滤波器进行数据融合得到k时刻的信息,然后通过如虚线所示信息流向将下一刻的状态向量以及协方差传输给邻近车辆,从而实现分布式协同定位.
3 协同定位算法
3.1 UKF协同定位算法
在车联网协同定位模型中,TOA观测向量tk相对于状态向量Xk以及辅助车辆的真实位置均是非线性的.对于传统的UKF方法而言,可以利用辅助车辆的GPS观测值作为辅助车辆位置的估计,因此待估车辆的定位问题可以描述为如下的离散时间非线性系统:

对于传统的无迹卡尔曼滤波先初始化状态向量和协方差,然后生成sigma点并加权求和预测状态向量的均值和先验协方差.根据得到的先验协方差生成新的sigma点,并加权求和预测观测向量的均值和协方差以及状态向量均值与观测向量均值之间的协方差.值得注意的是在对观测向量进行预测时没有辅助车辆的真实位置,这里使用辅助车辆GPS位置代替真实位置进行预测估计.最后,使用标准卡尔曼滤波进行状态估计的预测更新.
3.2 改进UKF分布式协同定位算法
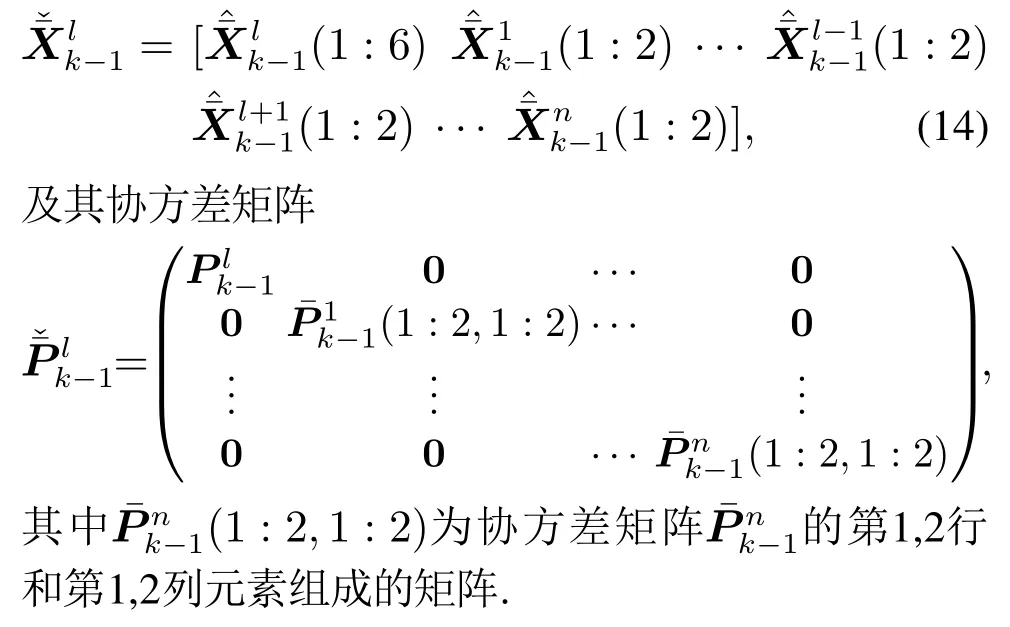
注意到观测方程(4)中,TOA测量函数既是待估车辆位置的非线性函数,也是辅助车辆位置的非线性函数.上一小节中的传统UKF方法使用GPS观测来代替辅助车量的真实位置.在本小节中,将提出一种改进的无迹卡尔曼滤波方法.通过分析辅助车辆的真实位置与待估车辆真实位置都不可获得,为了处理这种情况,将辅助车辆的位置扩维到状态向量上,如下所示:

在第k −1步,经过车联网V2V信息传输,即图3中实线部分的信息传输,扩维后系统(10)的初始状态更新为
基于扩维后的运动模型,其simga点的数量增加到2(2(n −1)+6)+1=4n+9,生成的sigma点具体如下:

参数λ应满足2n+4+λ>0,相应的加权系数为
通过DR动态运动模型对各sigma点进行预测,并预测状态向量的均值
相应的先验协方差为
根据得到均值及协方差,生成新的sigma点
对于改进的无迹卡尔曼滤波而言,每个sigma点都应该使用系统的非线性测量函数进行变换,因此转换后的sigma点计算如下:
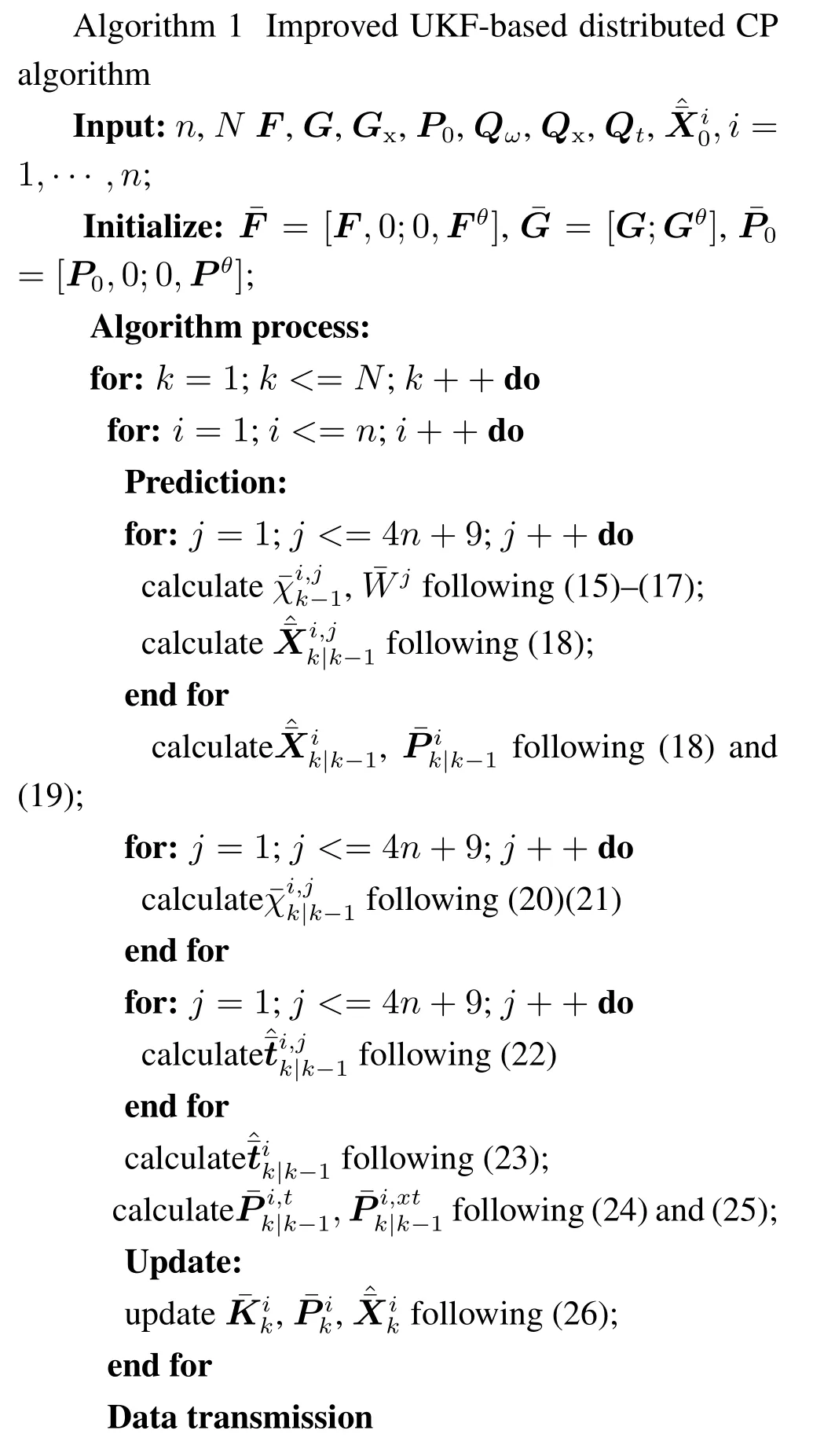
为直观的理解整个算法的流程,给出如下算法1所示的伪代码,其中:N表示采样次数,n代表车辆总数.

最后,车联网中的车辆再进行如图3虚线部分所示的两两数据传输,各车辆节点根据接收到的信息再进行下一步的分布式定位.
本文通过将TOA观测函数中辅助车辆位置扩维到状态向量来改进UKF中UT变换的近似精度.传统的UKF滤波在UT变换过程中直接使用带噪声的GPS观测,并忽略其观测误差,这在理论上无法保证UT变换后的近似精度.下面的引理在理论上保证了本文的改进UKF方法能达到非线性系统的三阶近似精度[22].
引理1对于具有对称概率密度函数的随机向量,如果非线性函数包含未知随机参数,则通过改进的无迹变换(23)–(24)得到的t的近似均值和协方差具有三阶近似精度.
4 仿真实验与结果分析
在数值模拟实验中,假设车载自组织网络中的车辆总数n=4,时间步长δt=0.2 s,采样点数为100.车辆机动参数设定为:假设车载GPS定位误差方差为,里程计和陀螺仪测量误差方差分别为和,加速度误差方差为,所有车辆都有V2V通信和TOA设备模块,TOA测量误差为零均值高斯白噪声,其方差为(2s/c)2,c为信号的传播速度.车辆定位精度由均方根误差来比较,其定义为RMSE,其中L=1000为Monte Carlo仿真次数.
4.1 仿真实验1
为验证本文提出的改进UKF的GPS/DR/TOA分布式协同定位方法的性能,通过数值模拟实验比较了GPS定位、GPS/DR定位、UKF的GPS/DR/TOA协同定位以及改进UKF的GPS/DR/TOA协同定位4种方法在以速度vx=vy=15 m/s匀速直线行驶下位置估计的RMSE.车辆的直线行驶轨迹如图4所示.
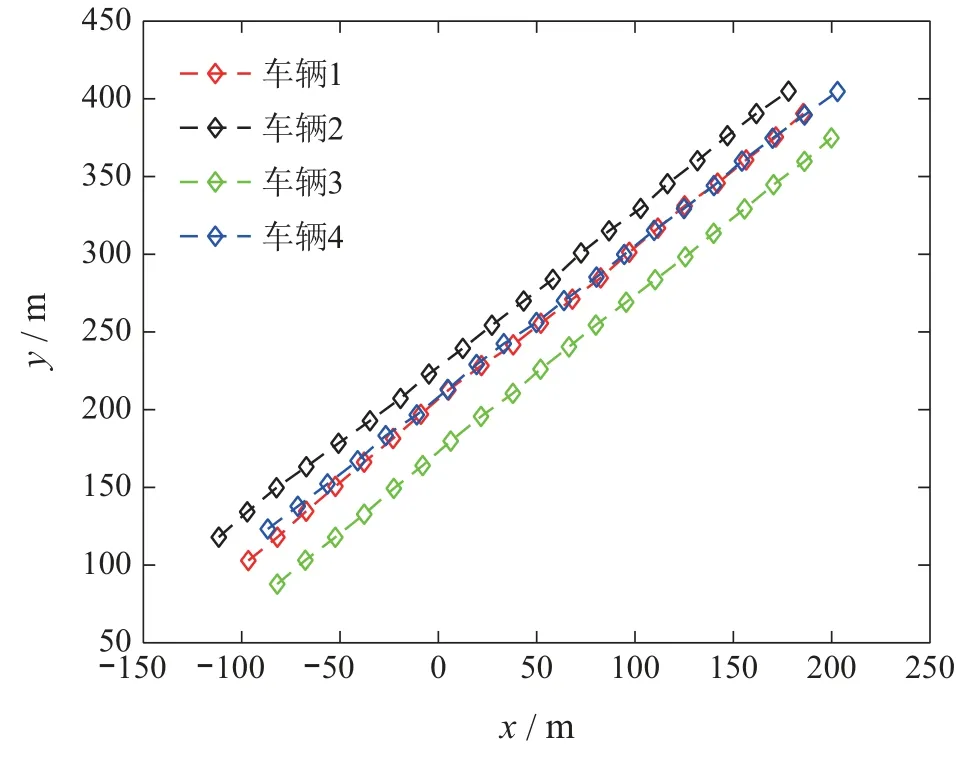
图4 直线行驶下的车辆轨迹Fig.4 Trajectory of vehicles with straight-line travel
各车辆在4种方法下的RMSE展示在图5–8中.从图5–8的结果可以看出单独GPS的定位效果是最差的,定位精度只有4.9862 m.基于KF的GPS/DR定位能够很大程度上提高定位精度,定位精度能够达到3.3977 m.UKF的GPS/DR/TOA定位能够进一步的提高定位精度,定位精度能够达到2.3723 m.改进UKF的GPS/DR/TOA定位能够更进一步的提高定位精度,定位精度能够达到1.9743 m左右.

图5 直线行驶下车辆1位置估计的RMSEFig.5 RMSE of location estimation for vehicle 1 with straight-line travel
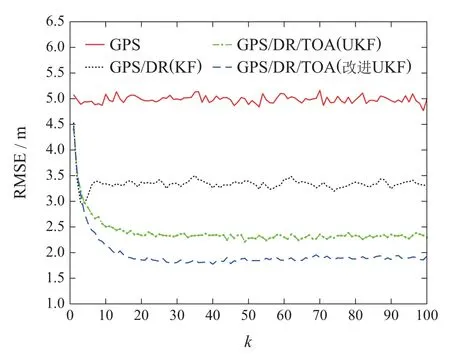
图6 直线行驶下车辆2位置估计的RMSEFig.6 RMSE of location estimation for vehicle 2 with straight-line travel
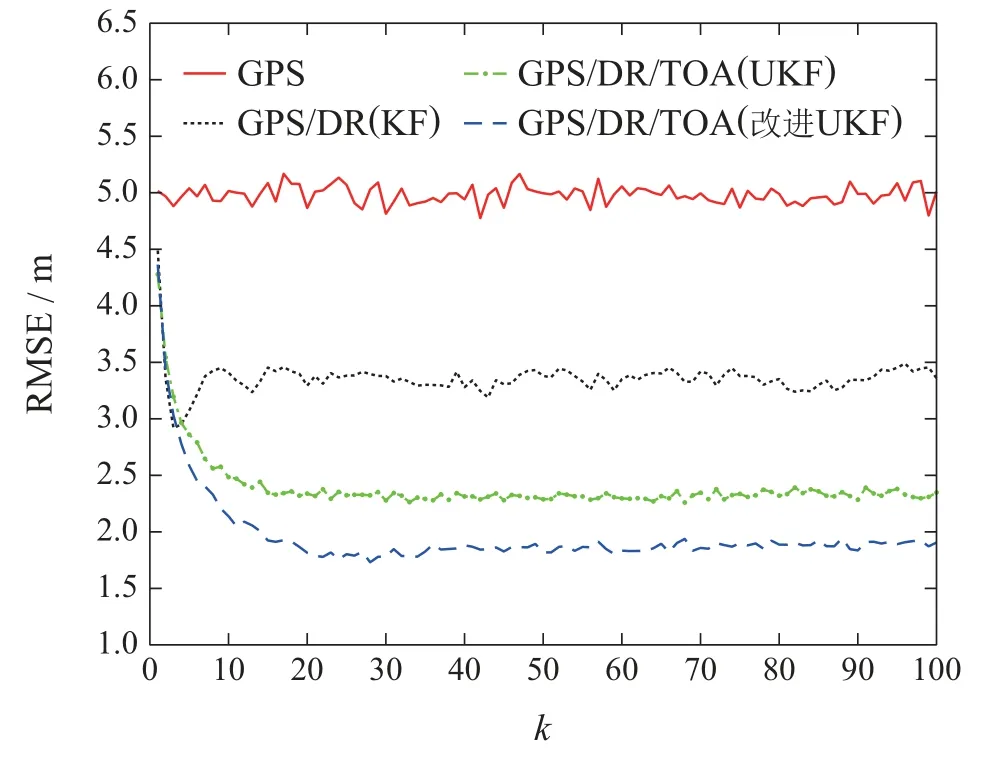
图7 直线行驶下车辆3位置估计的RMSEFig.7 RMSE of location estimation for vehicle 3 with straight-line travel
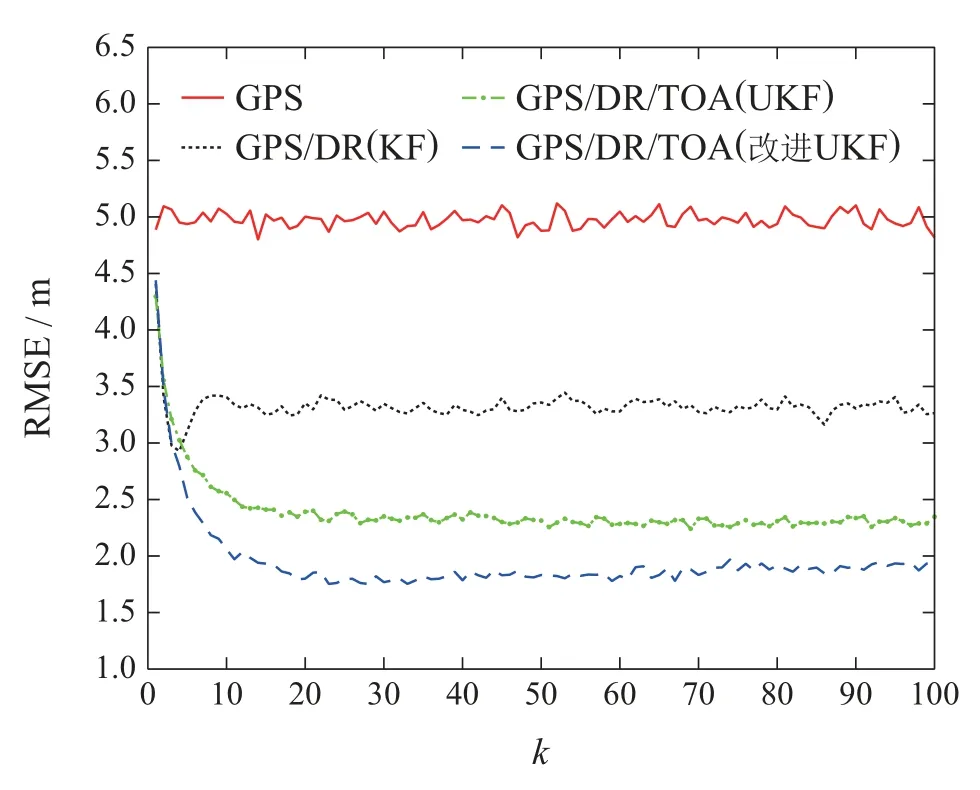
图8 直线行驶下车辆4位置估计的RMSEFig.8 RMSE of position estimation for vehicle 4 with straight-line travel
4.2 仿真实验2
为了进一步验证比较改进UKF的GPS/DR/TOA分布式协同定位方法的性能,再次比较了4种方法在环线行驶下位置估计的RMSE,环线行驶阶段可以分为4个阶段,其中4辆车行驶的第1阶段k=1,···,25速度分别为
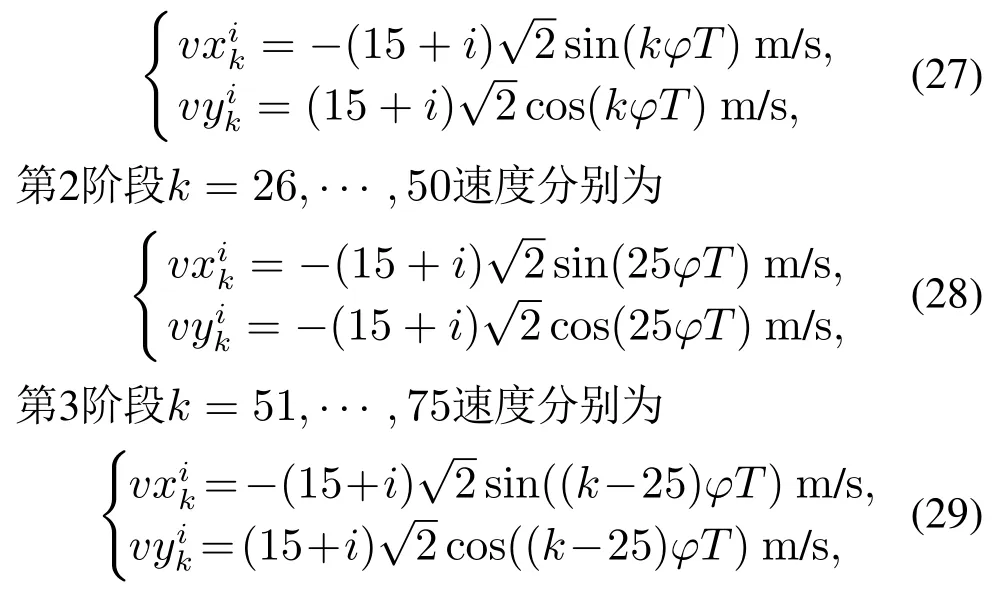
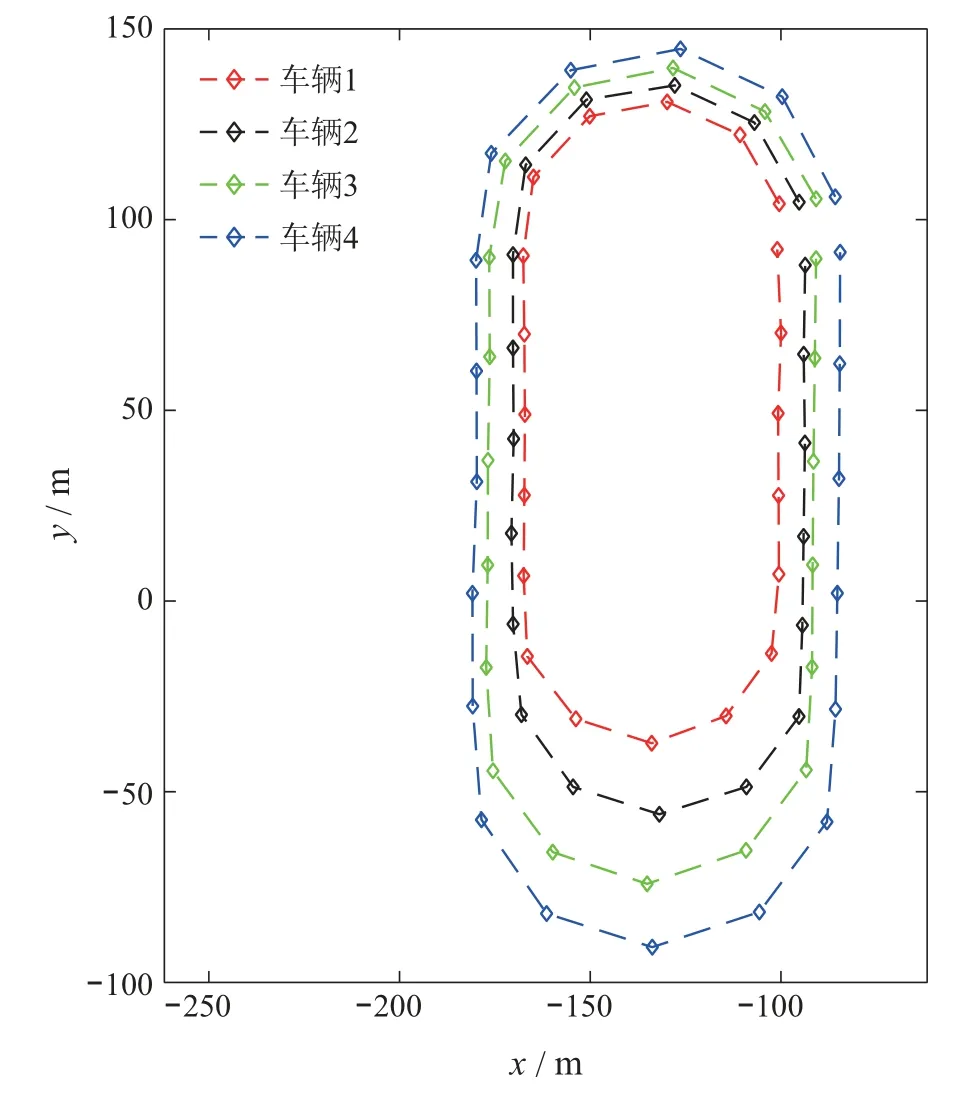
图9 环线行驶下的车辆轨迹Fig.9 Trajectory of vehicles with ring-line travel
各车辆在4种方法下的RMSE展示在图10–13中.从图10–13的结果可以看出,单独的GPS定位效果是最差的,定位精度只有5.043 m.基于KF的GPS/DR 定位能够很大程度上提高定位精度,定位精度能够达到3.5962 m.UKF的GPS/DR/TOA定位能够进一步的提高定位精度,定位精度能够达到2.9228 m.改进UKF的GPS/DR/TOA定位能够更进一步的提高定位精度,定位精度能够达到2.3468 m.
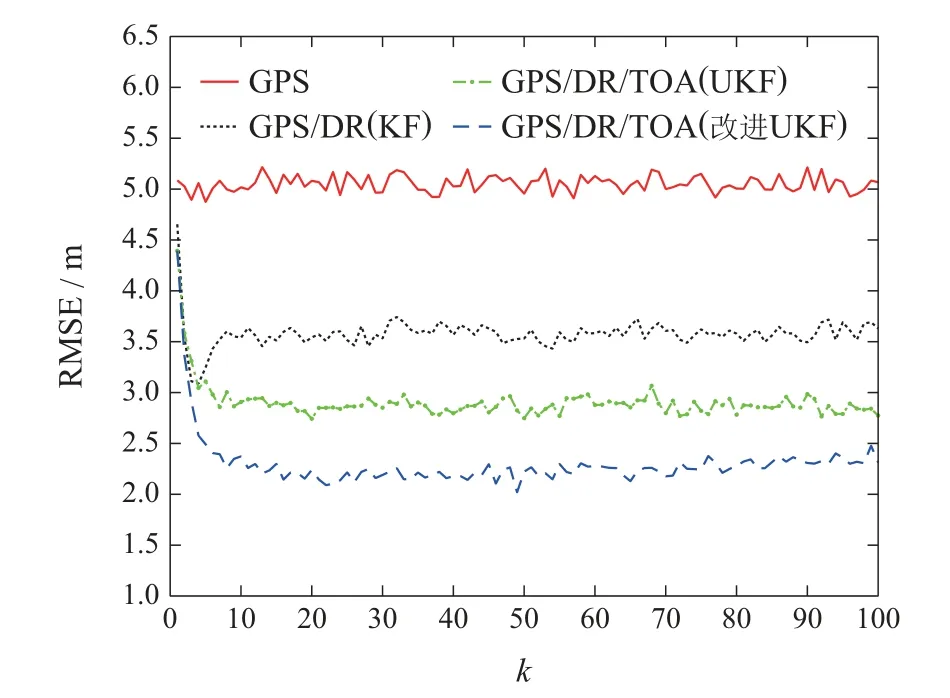
图10 环线行驶下车辆1位置估计的RMSEFig.10 RMSE of location estimation for vehicle 1 with ring-line travel
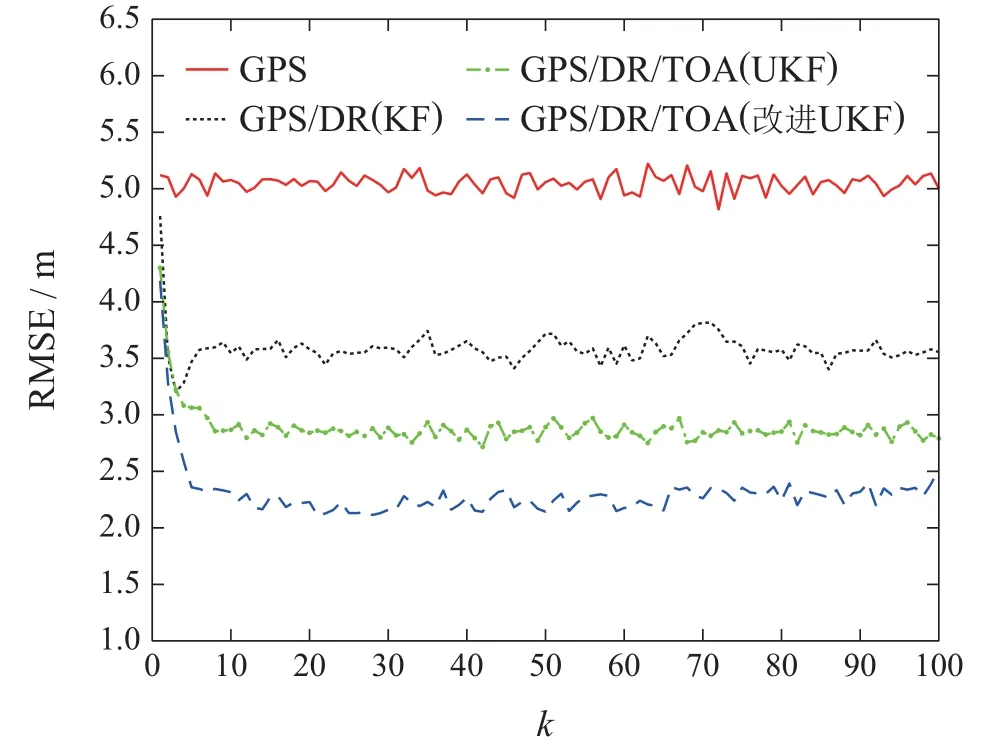
图11 环线行驶下车辆2位置估计的RMSEFig.11 RMSE of location estimation for vehicle 2 with ring-line travel
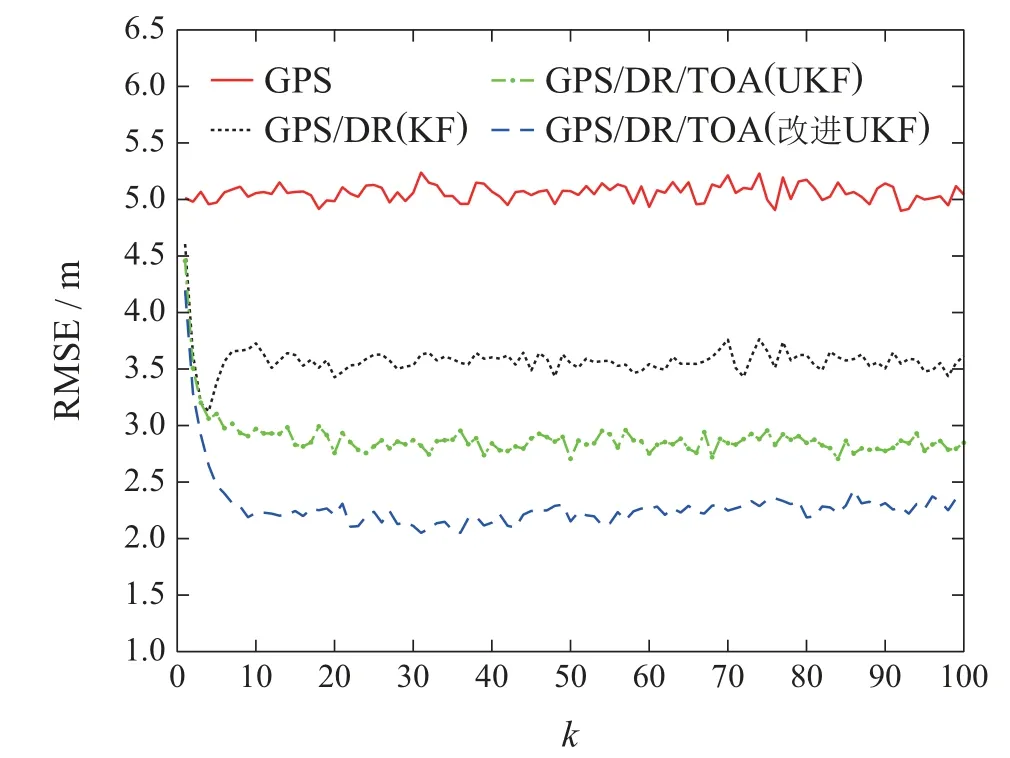
图12 环线行驶下车辆3位置估计的RMSEFig.12 RMSE of location estimation for vehicle 3 with ring-line travel
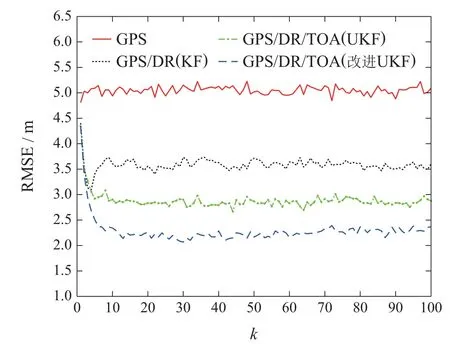
图13 环线行驶下车辆4位置估计的RMSEFig.13 RMSE of location estimation for vehicle 4 with ring-line travel
式(31)定义性能提升率参数µ,作为评价定位性能相对改善程度的指标:

其中:RMSEA表示改进UKF 的协同定位精度,RMSEB表示其它方法的定位精度.若µ为正说明改进协同定位相较其它方法定位性能得到改善,值越大说明改善的程度越高,反之则说明性能恶化.改进的UKF协同定位方法与独立的GPS定位和GPS/DR以及传统的UKF协同定位性能比较如表2所示,结果表明在匀速直线行驶的情况下,改进的UKF协同定位方法与独立的GPS定位和GPS/DR以及传统的UKF协同定位性能相比较,性能分别提升了60%,42%和17%,在环线行驶的情况下,性能提升率分别为53%,35%和20%.
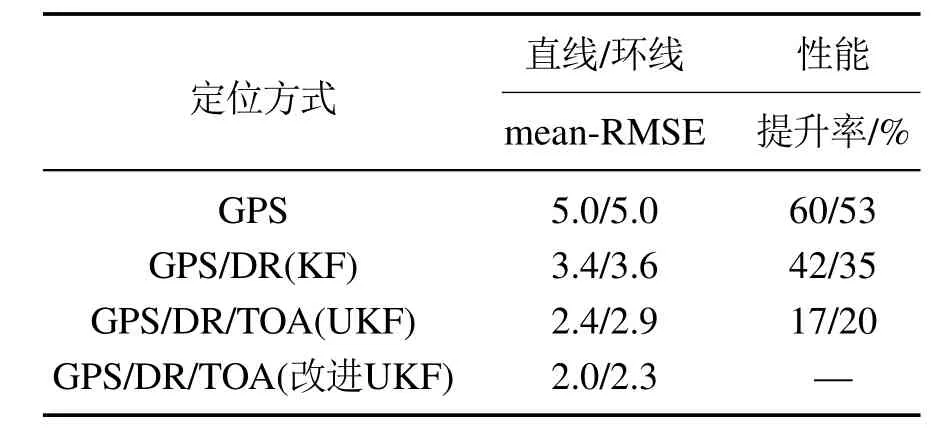
表2 改进UKF协同定位的性能提升率Table 2 Performance improvement rate of improved UKF co-positioning
5 总结
本文针对车辆定位场景中GPS信号容易受到多路径效应的影响,在道路上修建路边节点成本过高等实际问题,提出利用车载自组织网络中的V2V通信进行车辆分布式协同定位的问题.在车辆之间的TOA观测模型中,存在辅助车辆真实位置未知的问题,本文提出的改进UKF协同定位方法通过将辅助车辆位置扩维到状态向量,使得辅助车辆位置信息能够跟随待估车辆状态信息同步更新以提高定位性能.Monte Carlo仿真结果表明,改进的UKF分布式协同定位系统显著增强了车辆定位的精度.
猜你喜欢
物联网技术(2022年7期)2022-07-21
鸭绿江(2021年26期)2021-11-11
导航定位学报(2021年4期)2021-08-29
领导文萃(2021年5期)2021-04-02
智富时代(2019年4期)2019-06-01
智富时代(2019年4期)2019-06-01
计算机应用与软件(2019年2期)2019-04-01
经济研究导刊(2018年19期)2018-07-24
当代教育(2018年4期)2018-01-23
雷达学报(2017年3期)2018-01-19
