含SVG 的新能源多馈入系统振荡分析和广义短路比计算
2021-07-30 02:53辛焕海王冠中牛拴保王铁柱柯贤波马士聪
电力系统自动化 2021年14期
袁 辉,辛焕海,王冠中,牛拴保,王铁柱,柯贤波,马士聪
(1. 浙江大学电气工程学院,浙江省杭州市 310027; 2. 国家电网有限公司西北分部,陕西省西安市 710048;3. 中国电力科学研究院有限公司,北京市 100192)
0 引言
随着以风力发电和光伏发电为代表的新能源大力发展,中国电网逐渐演变为含高比例新能源和高比例电力电子设备的双高电力系统[1-3]。双高电力系统的重要特点之一为短路比(short-circuit ratio,SCR)低,使得基于锁相环同步的矢量控制策略动态性能变差,新能源设备间及其与电网间耦合程度增加,导致系统容易发生振荡等失稳问题[4-7]。因此,大规模新能源基地常配置高可控性的静止无功发生器(static var generator,SVG)以维持并网点电压稳定。然而,现有研究表明SVG 与新能源设备存在相互作用,但失稳机理尚待进一步研究[8-10]。
现有含SVG 的新能源多馈入系统(以下简称“多馈入系统”)稳定性(本文特指系统的小干扰稳定性和静态电压稳定)分析主要有2 类方法:基于状态空间的仿真或特征值分析[11]和基于复频域的阻抗分析[12]。基于状态空间的电磁暂态模型过于复杂,其特征值计算非常困难,而时域仿真分析难以揭示系统失稳机理且存在数值稳定性等问题。相对应地,复频域阻抗法适合分析单输入单输出系统,但在考虑多电力电子设备接入时难以找到解析方法,难以量化系统的稳定裕度。
基于SCR 的稳定性分析方法[13-15]是分析电力电子设备(直流、风机、光伏等)接入后电力系统电网强度和稳定裕度的重要切入点。其优势在于:对于单馈入系统,SCR 计算简单且物理意义清晰。具体地,对于基于锁相环矢量控制策略的电力电子设备并网系统,存在反映系统临界稳定的临界SCR(critical SCR,CSCR),而SCR 与CSCR 的差值反映了系统稳定裕度。若该差值大于0,则表明系统稳定,差值小于0 则表明系统不稳定。此外,该差值越大,说明稳定裕度越大,即系统越稳定。
为实现SCR 指标由单馈入系统向多馈入系统的推广,文献[16]针对一类相似电力电子设备接入的同构多馈入系统,提出广义短路比(generalized SCR,GSCR)的概念,其值记为γGSCR。其主要思想为:在接入设备同构的假设条件下,证明了多馈入系统的动态可解耦为多个单馈入系统的动态,并将稳定裕度最小的单馈入系统的SCR 定义为多馈入系统的GSCR,并得到系统稳定性和交流网络特征之间的显性关系,从而实现了多馈入系统稳定裕度的量化。进一步地,文献[17-18]基于模态摄动理论,论证了GSCR 适用于多样化新能源馈入系统的稳定性分析,并给出了此时GSCR 的详细计算方法。然而,这些工作都未考虑SVG 的影响,且消去了网络的无源节点,导致不能直接分析无源节点增加辅助设备或者网络线路改变等因素导致的系统特性变化。SVG 和新能源设备因控制目标存在较大差异,两者的外特性也差异较大。因此,GSCR 如何用于含SVG 的新能源多馈入系统稳定性分析还需要进一步深入研究。
为此,本文针对含SVG 的新能源多馈入系统,说明了GSCR 在量度系统电网强度和稳定裕度方面的有效性,并在此基础上给出了系统GSCR 及其临界值的计算方法。研究表明,GSCR 的定义仍然适用,但临界GSCR(critical GSCR,CGSCR)由新能源设备和SVG 加权平均后的等值单馈入系统决定,物理上解释为SVG 的接入改变了新能源并网所需的最小SCR,其值记为γCGSCR。最后,仿真算例验证了所提方法的有效性。
1 多馈入系统稳定问题及建模
1.1 多馈入系统及稳定问题描述
图1 为含k台SVG 和n台新能源设备(或新能源场站)的多馈入系统等效电路图。不失一般性,令图1 中节点1 至n连接新能源设备;节点n+1 至n+m为不考虑SVG 接入时网络中的m个无源节点,其中k个SVG 设备接入这m个无源节点中的部分节点(k≤m);剩余节点为无穷大节点。图1 中,I和φ分别为新能源设备节点注入电流幅值和相角;U和θ分别为新能源设备节点端电压幅值和相角;Is和φs分别为SVG 节点注入电流幅值和相角;Us和θs分别为SVG 节点端电压幅值和相角;E和θE分别为无穷大节点电压幅值和相角;下标i表示序号。

图1 网络结构保持的含SVG 的新能源多馈入系统示意图Fig.1 Schematic diagram of multi-infeed system with renewable energy and SVGs
含SVG 的多馈入系统可按图1 划分为设备侧和网络侧2 个部分。设备侧包括新能源设备和SVG,网络侧包括交流网络节点和无穷大电源。本文考虑的新能源设备[18]和SVG[8]的控制结构如附录A 图A1 所示,都采用基于锁相环锁相的矢量控制策略。
为了不失一般性和表述方便,假设网络线路电阻R和电感L之比为定值且忽略网络中电容的影响[19]。对于该多馈入系统,本文拟讨论的问题如下。
问题1:当考虑n个新能源设备和k个SVG 并网运行时,系统是否小干扰稳定和静态电压稳定,稳定裕度如何利用GSCR 进行量化。
问题2:网络结构、接入容量和控制参数对稳定性影响的规律如何用GSCR 表征,且GSCR 及其临界值如何计算。
为分析方便,本文主要考虑额定工况的情况。如果运行在非额定工况,需要将下文的GSCR 推广为运行GSCR[20]即可,下文分析思路仍然适用,限于篇幅本文不做过多探讨。
为回答上述问题,先建立分析模型。图1 中含SVG 的新能源多馈入系统可在频域中建立特征值分析或稳定分析模型,并表示为多变量反馈系统形式[21],分为设备侧传递函数矩阵YGm(s)和网络侧传递函数矩阵Ynetm(s)[17](YGm(s)和Ynetm(s)都为导纳形式,为表述方便,下文统一称为导纳传函矩阵),其特征方程表示为:

式中:det(·)表示求矩阵的行列式;s为拉普拉斯算子。
求解上式中s值得到系统特征根,进而可分析含SVG 的新能源多馈入系统小干扰稳定性。下面在全局同步xy坐标系中,推导Ynetm(s)和YGm(s)的具体表达式。
1.2 网络结构保持的导纳传函矩阵推导
在全局同步xy坐标系下,任意节点i和节点j间的线路动态方程为:

式中:ω0为系统额定角速度;下标x和y分别表示x轴和y轴电气分量;Ui和Iij分别为节点电压和线路电流;Lij和Rij分别为线路电感和电阻。
线性化式(2)可得:

由式(3)可知,SVG 的接入不影响网络侧导纳传函矩阵(仅跟线路阻抗参数有关),故参考文献[18],网络结构保持时(保留中间无源节点)网络侧导纳传函矩阵可表示为:

式中:⊗表示矩阵的Kronecker 积。B的标幺值和电感标幺值相等,故也可以用电感构成的矩阵表示,将其表述为如下分块形式:

式 中 :B11∈Rn×n,B12∈Rn×m,B21∈Rm×n,B22∈Rm×m。
式(8)的推导考虑了线路的动态特性,并在此基础上获得了网络导纳传函矩阵。然而,由于交流网络的特殊性质,导纳传函矩阵可以用工频下的导纳矩阵和另一个传递函数矩阵的乘积表示,而且该导纳矩阵是个常矩阵,工频下的导纳矩阵就能反映网络的特性。因此,下文阐述的GSCR 虽然是工频下的静态指标(需要特别强调的是,GSCR 仅与网络导纳矩阵B和新能源设备容量SBi有关,与设备自身动态无关[18];而GSCR 的临界值与设备自身动态相关),但却可以反映系统小干扰稳定裕度,这也是GSCR 区别于其他SCR 指标的一个重要特征,它本质是反映设备间的电网连接强度,或者可以将设备和电网组成一个网络动力学系统,GSCR 反映了设备到网络中心的一种“综合电气距离”。
1.3 新能源和SVG 侧导纳传函矩阵推导
设备侧导纳传函矩阵具体包括新能源设备导纳传函矩阵和SVG 导纳传函矩阵。
首先,推导新能源设备导纳传函矩阵。不失一般性,考虑在本地同步dq坐标系下(也可以在极坐标等其他坐标系下等价表示[22]),新能源设备导纳传函矩阵表示为:

式中:下标d和q分别表示d轴和q轴分量;Gidd(s)、Gidq(s)、Giqd(s)和Giqq(s)为设备侧导纳传函矩阵Gidq(s)的元素,由于下文推导不涉及设备侧导纳传函矩阵的具体表达式,故略去Gidq(s)的表达式,具体可参考文献[18]。
从xy坐标系到dq坐标系存在如下转换关系。

式中:Md和Mq分别为M在dq坐标系中d轴和q轴分量,其中M代表任意电气量;Mx和My分别为M在xy坐标系中x轴和y轴分量;xy坐标系和dq坐标系间的夹角为θ(由于dq坐标系中d轴常定位在本地端电压方向上,故θ也为端电压相角)。
将式(11)代入式(10)可得,在xy坐标系下节点i接入的新能源设备导纳传函矩阵表示为:

式中:Gixy(s)为在全局同步xy坐标系下基于自身容量基准的新能源设备导纳传函矩阵。
结合式(12),新能源设备导纳传函矩阵为:

式中:diag(·)表示块对角阵;SBiGixy(s)为对角块元素;0 为零矩阵。
类似地,可以推导得到SVG 设备导纳传函矩阵为:


式中:SBsj为SVG 的容量,j=n+1,n+2,…,n+m,当节点j未接入SVG 时,SBsj为0;Gsidq(s) 和Gsixy(s)分别为SVG 在本地同步dq坐标系和全局同步xy坐标系下的导纳传函矩阵,其中Gsidq(s)具体可参考文献[10]。
将新能源设备导纳传函矩阵式(14)和SVG 设备导纳传函矩阵式(15)相加,得到设备侧导纳传函矩阵YGm(s)为:

需要指出的是,上述特征方程的推导基于全局同步xy坐标系。实际上,如果基于其他坐标系或者雅可比传递函数矩阵得到的结论是一致的。例如,文献[22]讨论了极坐标系导纳传函矩阵和雅可比传递函数矩阵得到的系统模型之间的转换关系。
2 多馈入系统的稳定性分析
2.1 特征方程的等价变换

为叙述方便,将含SVG 的新能源多馈入系统结构保持下的动态模型Σ1记为:

值得说明的是,在分析多馈入系统稳定性时,相关文献通常分析消去中间无源节点的系统特征方程。事实上,考虑结构保持的系统特征方程与消去无源节点的系统特征方程是等价的(两者都是求解系统行列式等于零时变量s的解,即系统的特征根)。然而,结构保持的系统特征方程优势在于:对应结构保持的系统闭环传递函数矩阵保留了网络全部信息,可以详细分析网络所有线路以及无源节点辅助设备的参与因子等信息,相比于中间无源节点消去的情况,可更方便进行网络薄弱点定位和关键线路的识别等操作[23]。
2.2 网络结构保持的等效多馈入系统
为评估原含SVG 的新能源多馈入系统稳定裕度,本文参考文献[17]的思路,通过构造一个等效的同构多馈入系统Σˉ0去逼近原含SVG 的新能源多馈入系统稳定性,从而将异构系统稳定裕度评估问题转化为同构系统稳定裕度评估问题,而GSCR 可用于量化同构系统稳定裕度,进而将原含SVG 的新能源多馈入系统稳定分析和裕度评估问题转化为GSCR 及其临界值计算问题。
定义网络结构保持的等效n馈入系统Σˉ0为:

2.3 含SVG 新能源多馈入系统Σ1 稳定性近似方法


式中:o(⋅)为高阶无穷小量;‖ ‖⋅ 为矩阵的范数。矩阵的广义特征值定义见文献[24]。
证明:将文献[17]的特征值摄动结果替换为文献[25]中关于广义特征值的摄动结果(定理2.2)即可得结论,具体过程略。
由定理1 可知,Σ1和Σˉ0这2 个系统的广义特征函数的误差是摄动量的高阶无穷小量,故与系统主导特征值(稳定性最差的特征值[18])相关的主导广义特征函数也近似相等,因此,2 个系统的主导特征值也近似相等。换句话说,要分析系统Σ1的稳定性并量化其裕度,只需要分析构造出来的同构系统的GSCR 及其临界值即可。为此,下文将给出含SVG 的新能源多馈入系统GSCR 定义及其临界值计算方法。
在上述分析中,并没有认为系统Σ1所接入的新能源完全一致,而是适合存在多样化的新能源接入。因此,本文可看成是文献[18]的进一步深入和拓展,考虑网络结构保持后适合解决的问题更加一般化。
3 GSCR 及其临界值计算方法
3.1 GSCR 和稳定裕度计算流程
含SVG 的新能源多馈入系统Σ1稳定性可由等效同构系统近似,而等效同构系统稳定裕度可由GSCR 刻画。为此,将系统的GSCR 定义为含SVG 的新能源多馈入系统Σ1的GSCR,用于评估系统电网强度和稳定裕度。
定义1:含SVG 的新能源多馈入系统GSCR 定义为拓展导纳矩阵Jeq的最小特征值。其具体表达式为:
式中:eig(⋅)为求解矩阵特征值函数;SB为新能源设备容量矩阵;Bred为中间节点消去后的导纳矩阵。
或者用网络阻抗形式表示为:

式中:Z=(B11−B12B−122B21)−1为中间节点消去后的网络阻抗矩阵。
此外,文献[17]还给出了基于容量加权的GSCR 等价定义,表达式如下。

式中:Sai为节点i的短路容量[13];γFij为广义相互作用因子(generalized multi-infeed interaction factor,gMIIF)的数值;Zij为阻抗矩阵Z中的元素。

式中:ω1为系统临界稳定时对应的振荡频率。
综上,关于多馈入系统GSCR 的计算和稳定性分析流程如图2 所示,总结如下。

图2 含SVG 的新能源多馈入系统GSCR 的计算和稳定性分析流程图Fig.2 Flow chart of GSCR calculation and stability analysis for multi-infeed system with renewable energy and SVGs
1)根据网络信息和新能源设备容量信息,得到网络结构保持的导纳矩阵B(式(9))以及拓展导纳矩阵Jeq(式(33))。
2)根据Jeq计算γGSCR(式(32)),并结合SVG 落点位置和容量信息SBsj计算新能源设备权重系数p1i(式(26))和SVG 权重系数p2j(式(27))。
3)根据权重信息p1i和p2j、各新能源设备动态以及SVG 动态构造等效同构系统式(23))。
5) 根 据 GSCR 与 CGSCR 的 差 值(γGSCR−γCGSCR)判断含SVG 的新能源多馈入系统稳定裕度:当差值小于零,说明系统不稳定;反之,则系统是稳定的,且差值越大说明系统稳定裕度越大。
3.2 GSCR 计算方法的讨论
由3.1 节所提关于CGSCR 的计算方法可得如下2 个特点:①考虑接入SVG 前后,网络结构保持的导纳传函矩阵不变,等效同构系统的GSCR 与不考虑SVG 接入时多馈入系统的GSCR 相同;②等效同构系统的设备动态为新能源设备动态与SVG 动态的加权平均。
因此,SVG 的接入可理解为设备侧动态发生了改变,但网络动态不变,SVG 接入前后系统GSCR不变而GSCR 的临界值发生了变化。换句话说,SVG 的作用可等效为改变了新能源接入系统所需的最小SCR 要求,从而改变了系统的稳定裕度。此外,由于式(40)只说明SVG 的加入可以等价为新能源设备的动态特性发生改变,但是否提升稳定性以及提升程度与SVG 的实际控制策略有关(SVG 可能让系统变得更稳定,也可能恶化系统稳定性)。因此,如何通过修正SVG 的控制策略使系统稳定性提升成为可能,将是未来需要进一步开展的研究。
值得一提的是,本文理论推导具有一定的普适性。不仅是SVG,静止无功补偿装置(static var compensator,SVC)、模块化多电平换流器(modular multilevel converter,MMC)和以变流器为端口的负荷等容量小、动态模型元素小的电力电子设备同样可借鉴本文理论推导,分析系统小干扰稳定裕度和电网强度。
此外,静态电压稳定分析模型可看成是小干扰稳定模型在s=0 时的特例,故本文相关理论推导同样适用于分析考虑多类型装备接入的多直流馈入系统的电网强度和静态电压稳定分析。而GSCR 可分别从静态电压稳定和小干扰稳定分析异构系统交流电网强度和稳定裕度。
GSCR 临界值的计算可分为2 种情况考虑:①当SVG 和新能源设备参数已知时,可根据式(41)解析计算得到CGSCR;②当SVG 和新能源设备的控制参数未知时,可在实验平台搭建单馈入系统(式(40)),并通过控制器在环的半实物仿真得到临界值。
4 仿真与分析
为验证前文分析的有效性,在MATLAB/Simulink 环境下搭建如图3(a)所示三馈入系统。新能源设备和SVG 的控制参数分别见附录A 表A1 和表A2。网络参数和设备容量分别见附录A 表A3 和表A4。计算可得,不考虑SVG 情况下系统的GSCR 和CGSCR 分别为4.519 和2.450。此外,图3(b)给出考虑SVG 接入的三馈入系统对应的等效单馈入系统(式(39))结构示意图,其中SB为新能源设备容量,SBs为SVG 的容量,Lg为线路电抗。

图3 三馈入系统以及等效单馈入系统Σs0 单线图Fi g.3 One-linediagram ofthree-feed systemand equivalentsingle-infeedsystem Σs0
4.1 系统 与Σ1 主导特征模式近似效果分析


图4 L78变化时系统主导特征根轨迹对比Fig.4 Comparison of dominant root loci in systems with varying L78
4.2 基于GSCR 的系统稳定性分析

另一方面,根据式(41)可得系统Σs0的CGSCR为3.642,与实际值3.626 的相对误差约为0.44%,误差较小,说明采用系统Σs0的CGSCR 近似含SVG 的新能源多馈入系统CGSCR 的思路是可行的。
进一步,从时域角度说明基于GSCR 的分析方法是有效的。对于4.1 节含双SVG 的三馈入系统(L78=0.1 p.u.),t=1 s 时,无穷大电源11 发生持续0.05 s的0.1 p.u.电压跌落。将L78增加到0.162 p.u.,重复上述实验,图5 给出2 种情况下新能源设备1 输出有功功率的振荡波形。

图5 不同L78下三馈入系统中设备1 功率振荡波形Fig.5 Power oscillation curves of device 1 in threeinfeed system with different L78
由图5 可知,L78=0.10 p.u.时,在外电网扰动下设备1 输出有功功率曲线振荡收敛,这说明系统小干扰稳定。另外,该工况下γGSCR=4.519>γCGSCR,说明系统是稳定的,且具有一定的稳定裕度。另一方面,由图5 可知,L78=0.162 p.u.时,外电网扰动下设备1 输出有功功率近似等幅振荡,系统处于临界稳定状态,而该工况下γGSCR=3.644≈γCGSCR,说明系统同样是临界稳定的。
综上,频域特征值分析和时域仿真分析都说明:在该算例中,GSCR 量化含SVG 的新能源多馈入系统稳定裕度的结果是正确的。
4.3 SVG 参数对GSCR 临界值影响规律
首先,考察不同参数下SVG 接入对系统稳定性的影响。已有研究表明,SVG 可能恶化新能源并网系统稳定性,也可能改善系统稳定性[9]。针对4.1 节含双SVG 的三馈入系统(L78=0.1 p.u.),这里分别考虑如下3 个算例。
算例1:不考虑SVG 接入。
算例2:双SVG 采用附录A 表A2 中参数①。
算例3:双SVG 采用附录A 表A2 中参数②。
表1 给出这3 个算例下,系统的主导特征根以及阻尼比。由表1 可知,对比不考虑SVG 接入的情况,参数①下的SVG 接入会恶化系统稳定性,而参数②下的SVG 接入有助于提升系统稳定性。
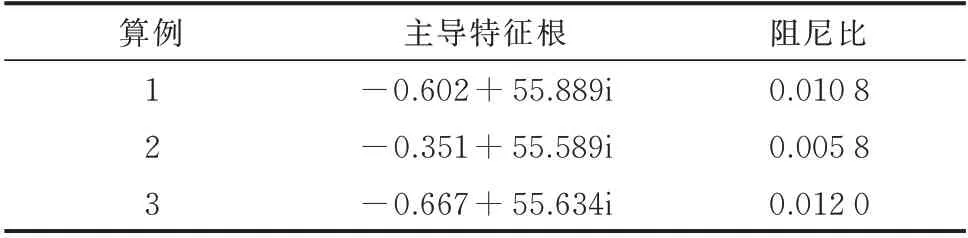
表1 不同SVG 参数下多馈入系统Σ1主导特征根和阻尼比Table 1 Dominant root and damping ratio of multiinfeed system Σ1 with different parameters of SVG
进一步地,分析考虑不同参数下的SVG 接入对新能源多馈入系统GSCR 临界值的影响。仍然针对本节3 个算例,增加电感L78直至系统临界稳定,表2 给出这3 个算例临界稳定时对应的L78大小以及系统CGSCR。

表2 不同SVG 参数下三馈入系统CGSCRTable 2 CGSCR of three-infeed systems with different parameters of SVG
由表2 可以看出,对比算例1(无SVG 接入),当SVG 采用参数①时,CGSCR 增大;当SVG 采用参数②时,CGSCR 减小。这说明当SVG 的接入有利于系统稳定性时,从GSCR 的角度可理解为SVG 的接入减小了系统的CGSCR,进而增大了系统的稳定裕度;反之,可理解为SVG 的接入增大了系统的CGSCR,导致系统稳定裕度降低,即SVG 的接入恶化了系统的稳定性。
5 结语
本文推导了网络结构保持下新能源多馈入系统的特征方程,提出了基于GSCR 且考虑SVG 影响的新能源多馈入系统小干扰稳定性分析方法。研究表明,GSCR 及其临界值可用于量化含SVG 的新能源多馈入系统稳定裕度,且GSCR 和新能源的动态特性无关,多机系统和单机系统的GSCR 临界值相等。此外,SVG 的作用可等效为改变了新能源接入系统所需的最小SCR 要求,从而改变了系统的稳定裕度,且改变程度与SVG 的控制策略有关。如何设计SVG 的控制策略从而提升系统的稳定性将是需要进一步开展的研究。
附录见本刊网络版(http://www.aeps-info.com/aeps/ch/index.aspx),扫英文摘要后二维码可以阅读网络全文。
猜你喜欢
中学生数理化·七年级数学人教版(2018年4期)2018-06-28
数学大世界(2018年1期)2018-04-12
中等数学(2017年2期)2017-06-01
瞭望东方周刊(2016年40期)2016-11-02
电测与仪表(2016年2期)2016-04-12
核科学与工程(2015年2期)2015-09-26
电测与仪表(2015年5期)2015-04-09
电测与仪表(2014年15期)2014-04-04
中国海洋大学学报(自然科学版)(2014年8期)2014-02-28
小学生导刊(高年级) (2006年6期)2006-06-27