
一种用于潜标的基阵信号采集系统
2021-07-26 05:54王玥
声学与电子工程 2021年2期
王玥
(第七一五研究所,杭州,310023)
我国是一个海洋大国,拥有丰富的海洋资源,对海洋资源的开发,不仅可以获得巨大的经济利益,也可以彰显强大的科技实力。从20 世纪60 年代开始,美国就借助于舰船、潜艇、飞机、浮潜标、无人航行器和卫星等手段收集各地海域信息,在水面及水下利用声学手段扩大信息交互范围,通过组网实现每个传感器的信息共享。自20 世纪70 年代以来,国外各种潜标就得到了广泛的应用。随着海洋科学研究、综合利用和环境监测力度的加强,20 世纪90 年代后我国潜标的应用也越来越多[1-2]。
本文中的潜标具备主动发射和被动接收功能,利用其主动发射功能对水下的其它潜标进行唤醒。当载有本潜标的移动平台到达工作目的地附近时,上位机发出唤醒命令,潜标通过功率放大器把已知电信号经功率放大后送到发射换能器,经发射换能器电声转换后,将信号以声波的形式在目标场所发布。当目标场所中的潜标收到唤醒信号时,通过主动功能进行回应。本潜标根据回应内容,逐步接近并找到回应的潜标。
1 系统架构
系统构成如图1 所示。信号发射时,由显示及控制设备发送指令,选择相应的信号模式,信号处理设备产生相应的信号,通过功率放大设备对电信号进行功率放大,通过干湿端的互联介质传输到电声转换元件,把电信号以声波的方式进行发射。在显示控制设备进行发送指令的同时还把指令发送至接收设备。
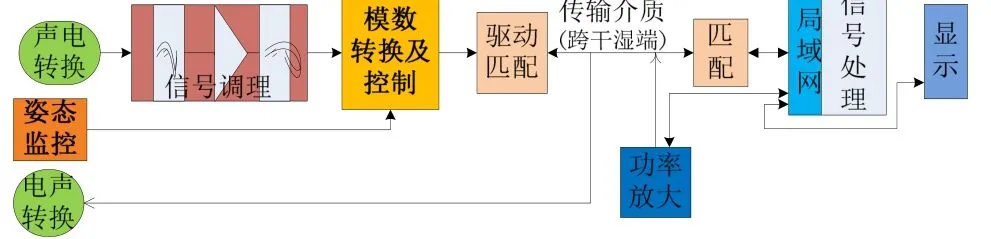
图1 潜标系统构成
在进行信号接收时,声电转换元件把声信号转换为微弱电信号,经信号调理电路,把微弱电信号高保真地放大,充分利用模数转换的动态范围。对信号完成模数转换后,按一定数据格式对其进行编码后发送到干端局域网。信号传输时要求干湿端具有相应的匹配和驱动电路。信号处理设备接收局域网数据,完成信号处理,将结果送到显控设备。为了对设备进行运行姿态监测,需要安装若干姿态传感器。姿态传感器信号通过控制电路、复用声接收信号的传输链路把相关数据送入局域网。
姿态监控传感器选用一个温深传感器和一个航向传感器,声电转换采用16 通道的陶瓷水听器基阵,水听器信号调理采用16 个调理电路,16 路水听器信号和2 路传感器信号的采集传输采用1 个采集传输模块,干湿端的数据传输介质采用1310 nm 的光纤,传输体制选用以太网,基阵信号进行同步采集。相关的功能框图如图2 所示。图中,温深传感器和航向传感器采用RS485 与采集传输模块进行信号交互,水声信号调理模块以模拟差分信号与采集传输模块对接。

图2 接收系统简要架构
采集传输模块由模数转换、控制模块和以太网光接口电路组成,完成16 路信号的同步采集并按IEEE802.3 相关协议的要求[3],将数据组成UDP-IP帧,通过光纤链路将数据送到干端,传感器数据也按照类似的方式,采集传输模块通过RS-485 接口接收传感器数据。采集传输模块还需要通过以太网接收来自显示控制设备的命令,完成相应动作[4]。
2 采集传输电路模块设计
采集传输电路采用AD8476 作为调理信号的缓冲器,ADS1278 作为模数转换芯片,XC3S500E 型FPGA 作为控制单元,XCFS04 作为FPGA 的配置芯片,DM9000BI 作为以太网物理层芯片,MAX3283E 作为RS485 接口芯片。
采集传输电路采用8 V 和±8 V 两组电源供电,板上采用二次稳压技术。根据各芯片的工作电压及工作环境,8 V 电源经二次稳压后,产生数字电路所需的5 V、3.3 V、2.5 V、1.8 V、1.2 V 电压;±8 V电源经二次稳压后,产生模拟电路工作所需的±5 V电压。在采集传输模块中,ADS1278、XC3S500E和DM9000BI 是核心芯片。其中,ADS1278 是一块8 通道同步采样24 位型模数转换芯片,具有最高128 kHz 的采样率;在高速采样模式下,具有111 dB的信噪比。模拟信号侧与AD8476 的接口如图3 所示。

图3 ADS1278 模拟信号侧接口
AD8476 采用双电源供电,接收调理电路的差分信号,并以Vcom 引脚的电压为基准,输出ADS1278 所能接受的信号。R1、R2、C4、C5、C6构成简单的滤波网络。
ADS1278 数字侧的接口有两种协议:SPI 和帧同步接口协议,都是通过相同的引脚,实现不同的协议来完成。本设计中采用的是SPI 协议,其模式选择位FORMAT[2:0]置为“001”。这时,数据位置固定,DOUT 模式为TDM,其接口如图4 所示。时序逻辑如图5 所示[5]。

图5 FPGA 驱动ADS1278 的时序逻辑
FPGA 在完成声通道信号的模数转换和传感器信号的接收后,按UDP-IP 协议的要求,将数据组成UDP-IP 帧送以太网物理层芯片DM9000BI,FPGA 与DM9000BI 的数字接口如图6 所示,逻辑关系如图7 所示[6]。

图6 FPGA 与DM9000BI 的数据接口电路
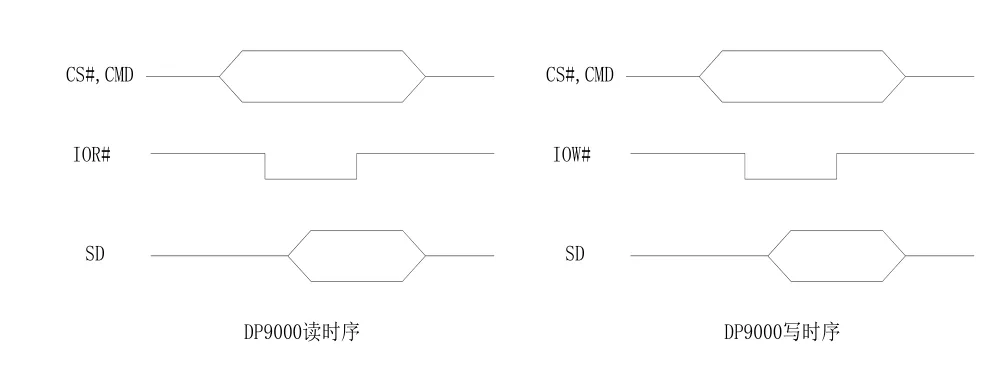
图7 FPGA 读写DM9000BI 的时序逻辑
采集传输电路还有一个功能是接收来自干端的下行命令,其过程基本与上行数据进行UDP-IP组帧的过程相逆。下行命令为干端发送、湿端接收的UDP-IP 帧,主要作用为指令发送,如增益控制、TVG 控制、开始采集、停止采集等。FPGA 根据以上各数字接口的逻辑及初始化要求完成相应的编码,经下载测试后,功能正常。
3 测试数据及分析
采集传输系统设计完成后,测量其相位一致性、幅度一致性和噪声值如表1、2 所示。从表中数据可见,各通道的相位差<1°,幅度不一致性<0.5 dB。
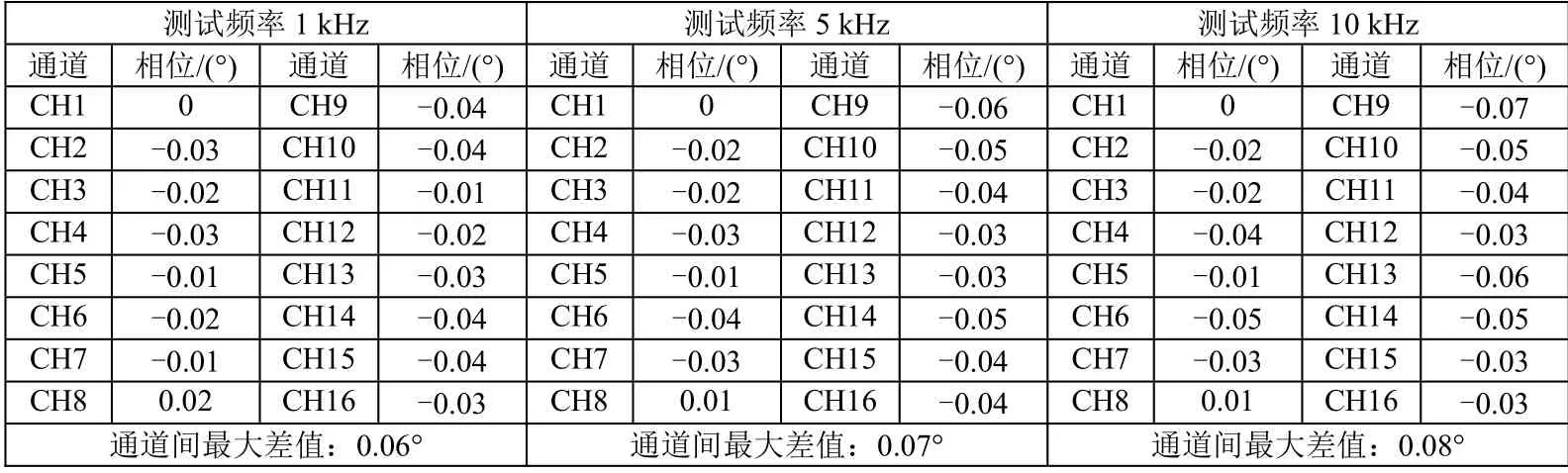
表1 16 通道相位一致性数据表(以第1 通道为基准)
图8 为单通道短路噪声幅度谱,带宽为10 kHz,其随机噪声<-120 dB/√Hz,与ADS1278 的器件手册相符。潜标在安静测试环境下,通过显控软件接收数据包,测得1 kHz 处噪声约为35 dB,低于大洋深处0 级海况的环境噪声45 dB@1 kHz。在全频带内满足各种低噪声海洋环境中的应用。
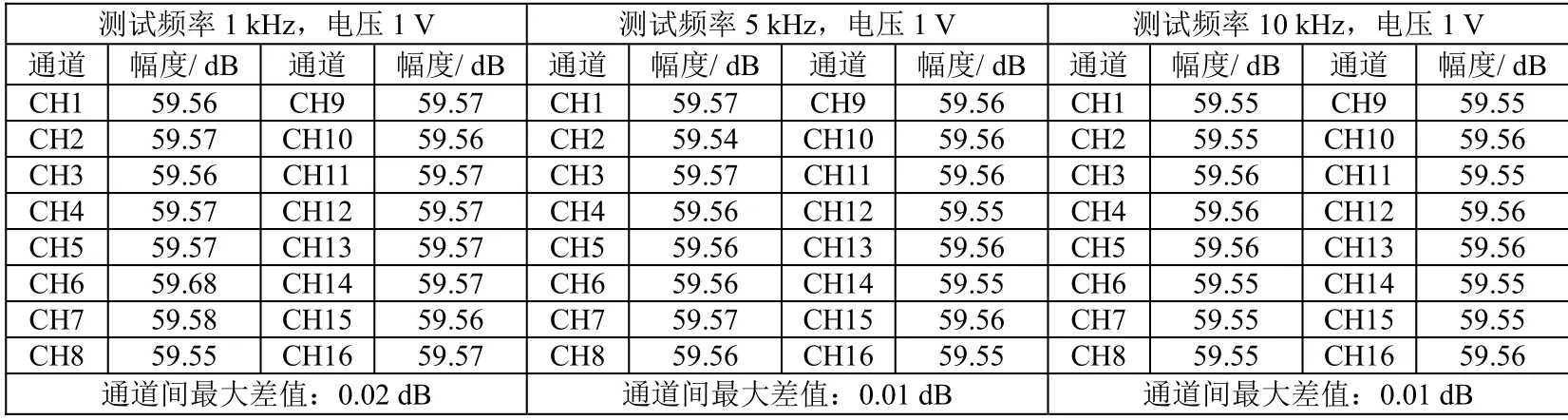
表2 16 通道幅度一致性数据表

图8 单通道短路噪声频谱
4 结论
本文介绍了一种用于潜标的采集传输系统,可以实现多路水声信号、传感器信号的并行采集以及网络传输。系统的噪声低于“0”级海况的海洋环境噪声,具有较好的应用价值。对用于潜标的采集传输系统,将来可以向多元化发展。根据不同的应用场合可以在湿端完成水声信号处理,采用低功耗电子线路设计技术和自容式技术,形成系列化、模块化、标准化产品。
猜你喜欢
环球时报(2022-09-29)2022-09-29
今日农业(2021年19期)2021-11-27
发明与创新(2021年17期)2021-07-05
军民两用技术与产品(2021年12期)2021-03-09
装备制造技术(2020年1期)2020-12-25
今日农业(2020年13期)2020-08-24
中国洗涤用品工业(2019年4期)2019-05-11
今日农业(2019年16期)2019-01-03
电子制作(2017年24期)2017-02-02
中国交通信息化(2015年11期)2015-06-06
