
南海深海典型海深环境下声场分析
2021-07-26 05:54朱辉庆
声学与电子工程 2021年2期
朱辉庆
(海装驻杭州地区军事代表室,杭州,310023)
水下声传播的机理随着海深的增加将发生很大的改变,声传播特性从浅海的“近球/柱面扩展”向“稳定的结构性传播”转变。大深度特点以及典型的声速剖面结构形成了深海多途现象,包括直达声线传播、海底/海面反射声线传播、可靠声路径传播、会聚区传播、表面声道传播、深海声道轴传播等。影响声线传播结构的因素主要包括两大类:声速剖面和边界反射(包括海面、海底)。温度、盐度、深度等因素对声传播的影响最终都体现在声速剖面上。可以说,声速是影响声传播最基本、最重要的参数[1]。声速剖面可以根据温度的垂直分布形成典型的“三层结构”,即表面混合层、主跃层、深海等温层[2]。深海声速剖面比较重要的两个参数是声道轴深度、临界深度,影响了深海声道轴传播和会聚区传播的形成。会聚区作为深海最典型和重要的传播现象一直是国内外学者研究的重点。Hale[3]较早在海上实验中观测到会聚区现象,会聚区声强比按球面扩展计算的声强高出许多。Urick[4]和张仁和[5-6]均从理论上分析过会聚区的特征。我国南海有大范围深海区域,是研究深海声传播的重要环境,本文对南海典型海深位置进行声传播特性分析。
1 海深选择
图1 为中国南海海深概要图。可以发现,海南省三亚向东南方向,海深逐渐变深,海深呈现较为明显的由浅海向深海过度,到中沙群岛以南,便进入了4000 m 以上的深海区。为分析不同海深情况下的深海声场特性,本文选择了三处典型的海深,位置分别为:位置①[112.25°E,18.75°N]、位置②[113.25°E,17.75°N]、位置③[114.75°E,14.25°N],见图1 红色字体标注。本文所用数据来源于SODA,主要用其温盐深数据,计算获得声速剖面数据,用于仿真深海声场计算。

图1 中国南海海深概要图

声速计算公式采用下式[7]:
式中,c为声速,t为温度,s为盐度,h为深度。
数据选取2003~2007 年1 月份(冬季)的历史数据平均值,三个位置处的声速剖面(Sound Speed Profile,SSP)如图2~4 所示,分别代表了约1500 m、2500 m和4500 m的典型海深情况。从声速剖面看,三处声速剖面结构较为相似,主要包括以下几点:(1)存在典型的表面混合层,即典型的冬季表面声道;(2)声道轴均在1100 m 附近;(3)在声道轴以下,存在明显的深海等温层,声速随深度(压力)增大而增大;(4)均为非完全深海声速剖面(即海底声速小于海表面声速),其中需要注意的是,位置③即便海深达到4000 m 以上,依然是非完全深海声速剖面。
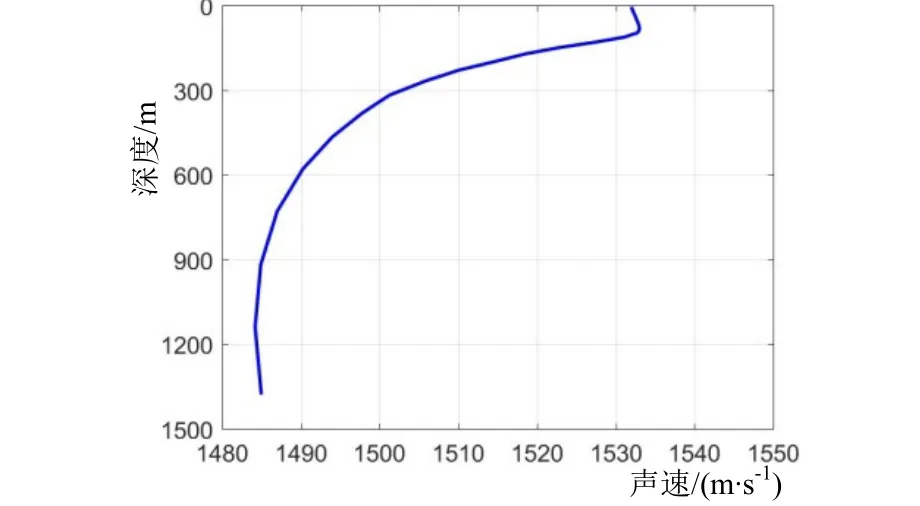
图2 位置①的SSP
2 声场分析
利用声场射线模型,对三处典型海深环境进行声传播分析,并总结其声场特征规律。仿真频率取1000 Hz。
2.1 海深1500 m
针对深海水下目标,其工作深度通常较大,本文以100 m、300 m 作为典型目标深度进行分析,分别仿真不同深度下的传播损失结构,如图5 所示,SSP 见图2。从仿真结果看,在位置①,当声源较浅时(≤100 m 的情况),表面声道作用明显,声信号除了与海底海面反射外,存在一部分沿表面声道传播的声能量。仿真结果表明,表面声道的传播距离较远,若以80 dB 的传播损失为参考,表面声道传播距离可达20 km 以上。深海表面声道传播可用于远距离目标探测、深海声通讯等。而随着声源深度的增大,表面声道的作用逐渐减弱,当声源深度增大至300 m 时,如图5(b)所示,声传播以海底反射为主。由于海深深度不够,该种情况下无法形成典型的会聚区现象。声场呈现出连续反射的、参差起伏的强弱结构。
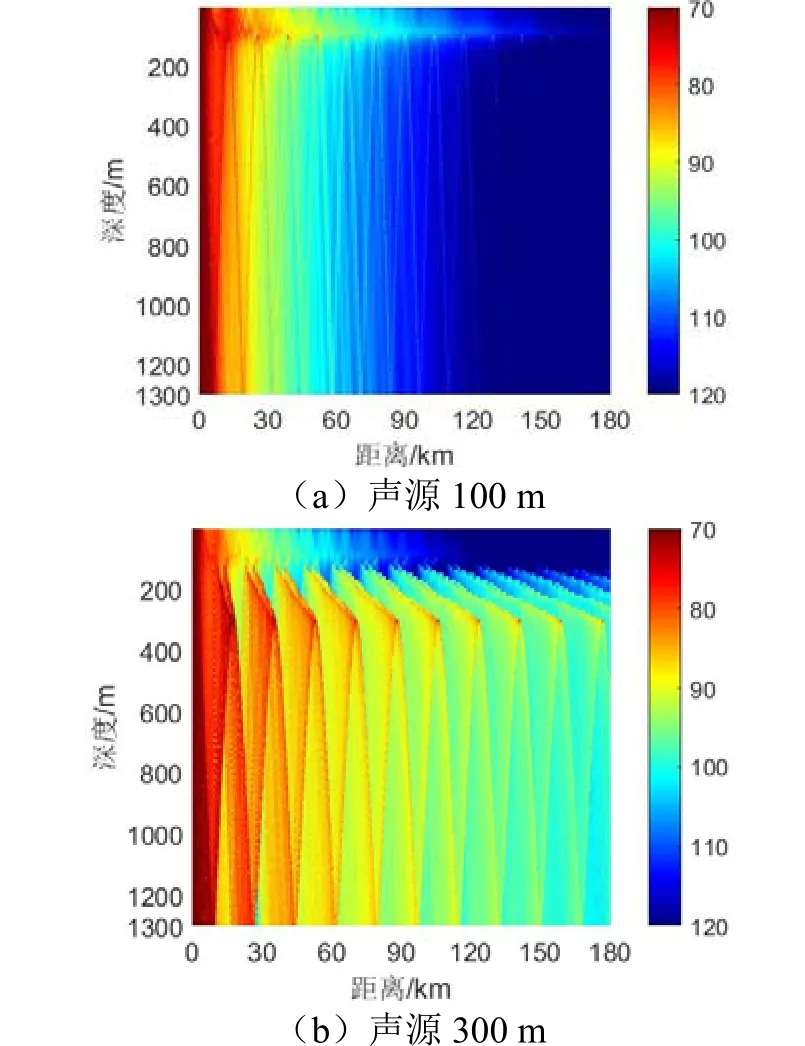
图5 传播损失二维图(位置①)
2.2 海深2500 m
声源深度同样取100 m、300 m, SSP 如图3,声场仿真结果如图6 所示。

图3 位置②的SSP

图 6 传播损失二维图(位置②)
仿真结果可见,当海深增大至2500 m 左右,同样的100 m 深声源,表面声道传播现象减弱了,声线主要以海底反射的形式往外传播。当声源深度增大至300 m 时,开始出现会聚区现象,此时靠近海表面的会聚声信号依然以海底反射声线为主,包含少量折射声线(即典型的会聚区声线)。
2.3 海深4000 m
位置③的海深达到4000 m 以上,声速剖面如图4 所示,仿真声源深度同上,仿真结果如图7 所示。位置③是典型的深海大深度区域。然而,从声速剖面看,此处的声速剖面依然没有达到完全声速剖面,所以当声源很浅时,依然无法形成完整的会聚区。只有当声源深度较深时,才会形成典型的会聚区现象。

图4 位置③的SSP

图7 传播损失二维图(位置③)
对比图7(a)和图6(a)可以发现,位置③处已经初具会聚区现象,海表面附近会聚信号区宽度较大,可利用性提高;对比图7(b)和图6(b)可以发现,位置③处300 m 深声源信号可形成较完整的会聚区,从而其声影区结构也较为明显。
3 应用分析
对于三种典型深海海深情况下的声场特征,分析其在水声装备应用中的特点。深海声场特点决定了纯被动探测很难对水下目标实现有效预警,主动声呐探测是当下远距离探测的主要手段,且主动声呐可配合舰壳声呐、拖曳线列阵、声呐浮标等多平台进行协同探测。
简化分析模型,设某主动声呐探测装备的发射声源级为205 dB,接收增益为10 dB,收发位置接近;分析海况为三级,海洋环境噪声1000 Hz 频率上设为 67 dB;目标强度为10 dB,检测阈为-5 dB。计算主动声呐方程的品质因数:
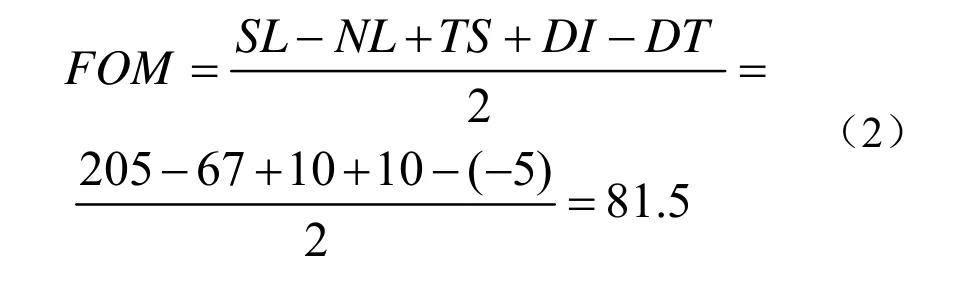
式中,SL为声源级,NL为海洋噪声级,TS为目标强度,DI为接收指向性指数,DT为检测域。
由上文比较可知,三种典型海深情况下,声源300 m 深的情况比声源100 m 的情况更适合探测目标。设收发同深,图8 为声源和接收都为300 m 海深时的传播损失随距离的变化,图中红色虚线表示FOM(即代表单程最大允许传播损失)。
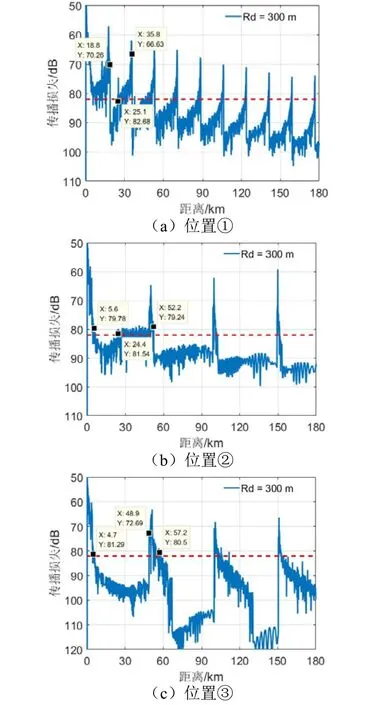
图 8 声源和接收同为300 m 时的传播损失
由图8 可知:(1)位置①处,第一探测区可达约18 km,随后有近7 km 的影区,继而又出现约10 km 宽的探测区,并按影区、探测区依次交替出现,整体上呈现影区逐渐增大、可探测区逐渐缩小的趋势,直至可探测区近乎消失;(2)位置②处,直达信号的可探测区很小,只到5 km 左右,第1会聚区的可探测范围约为25~52 km,第2、3 会聚区的可探测区域较小,可利用性差;(3)位置③处,直达信号的可探测区很小,约5 km 左右,第1会聚区的可探测范围约为49~57 km,第2、3 会聚区的可探测区域较小,可利用性差。
4 总结
文章以SODA 海洋数据库为基础,选择了三个位置,分析了南海深海三种典型海深情况下的冬季声场特性。仿真分析结果可得到以下结论:
(1)海深1500 m 左右的海域,浅声源存在明显的表面声道传播现象,深声源则主要以海底反射的形式进行声线传播;
(2)海深越大、声源深度越大,越容易形成典型深海会聚区。该海域中声源深度300 m、海深2500 m 以上均可形成稳定的会聚区现象;
(3)海深1500 m 情况下(即无法形成会聚区情况),近场探测范围较大,距离越远,可探测范围越小。
(4)海深2500 m 情况下,近场探测范围较小,第一会聚区(声线反转与海底反射同时存在)可探测范围很大,可达20 km 以上;
(5)海深4000 m 以上时,近场探测范围较小,第一会聚区探测范围也不大,对装备探测深度提出了较高的要求。
猜你喜欢
家庭影院技术(2021年10期)2021-11-20
家庭影院技术(2021年1期)2021-03-19
家庭影院技术(2020年7期)2020-08-24
海岸工程(2020年1期)2020-04-25
音乐天地(音乐创作版)(2019年10期)2020-01-06
青年歌声(2019年9期)2019-12-07
家庭影院技术(2018年10期)2018-11-02
福建文学(2018年6期)2018-07-24
中学生数理化·八年级物理人教版(2016年7期)2016-12-24
航空学报(2015年4期)2015-05-07
