
实用防雨型多旋翼无人机设计*
2021-07-26 15:42:18徐宏庆何启瑞郑潘璇
科技与创新 2021年13期
徐宏庆,何启瑞,郑潘璇
(正德职业技术学院,江苏 南京 211100)
1 系统设计思想
本次设计的中心思想是完成多旋翼无人机的防雨设计。因此,多旋翼无人机的基本架构没有多大变化,依然采用传统的6旋翼布局。雨天时,常规的多旋翼无人机裸露在外的电机和中心板以及电调、电池以及飞控和接收机、GPS的部件不能进水,需要对上述部位进行防雨设计。设计的中心思想是把上述部位用设计好的防雨罩罩上,而传统的6旋翼无人机电机布局在机臂末端,而且电机上安装了螺旋桨,罩上防雨罩就不能工作,因此设计上借鉴了直升机的尾旋翼设计结构,螺旋桨不直接由电机驱动,通过同轴齿轮和传输皮带与电机连接,通过皮带实现螺旋桨的旋转。这样就把电机的安装位置移至中心板,只要对中心板进行相应处理即可达到预计效果,大大降低了设计的难度。
2 多旋翼无人机的设计
2.1 机体上下底板设计
常规结构的6旋翼无人机机体部分主要安装飞控、GPS、电池、遥控接收机等部件。需把电机和电调等部件安装并固定在底板上。并且由于电机高速旋转,需要给电机加装固定装置,所有机体上下盖板都需要重新进行设计。
本方案设计思想:把电机、电调、飞控、接收机等部件都放置在上下底板之间,上顶板上面主要安装电池、GPS、安装防雨罩。多旋翼无人机上、下底板设计具体如图1所示。
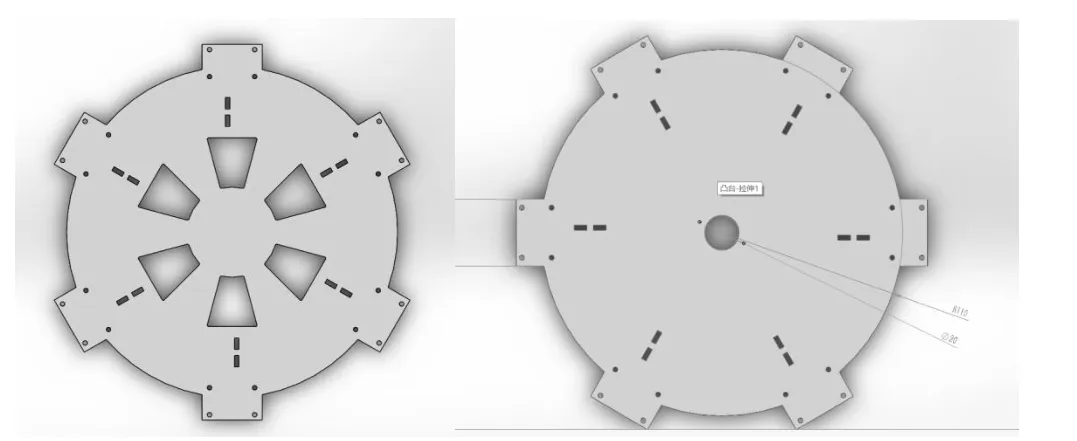
图1 多旋翼无人机上、下底板设计
上底板采用了碳纤维板,复合材料的使用大大减轻了飞机的自重,同时耐用性也大大增强。上底板是直径为110 mm的圆形,中心圆孔的直径为20 mm,用于安装GPS系统与飞控的连接线。多旋翼无人机机臂安装在6个长方形的外突矩形处,具体尺寸是15 mm×40 mm,均等分布。6个矩形的上方各开了2个矩形孔,这是对应的6个电机的卡位固定位置,主要是保证电机能够稳稳固定在上下底板之间正常稳定地工作。
下底板上主要安放电机、电调、飞控、接收机等部件。下底板也采用了碳纤维板材质,与上底板大小一样,底板上的6个梯形开孔在足够强度基础上进行减重,同时也达到较好的散热效果,中心园上安装着飞控,电调和电机均匀地分布在6个机臂之间,也保证了飞机中心的平衡。
2.2 电机底座设计
本设计方案中,电机也在下底板上,考虑到电机传动机构设计,电机选用了卧式放置方式,电机转达轴朝外。本设计选用的电机是朗宇电机,根据电机的具体尺寸设计了电机底座,如图2所示。
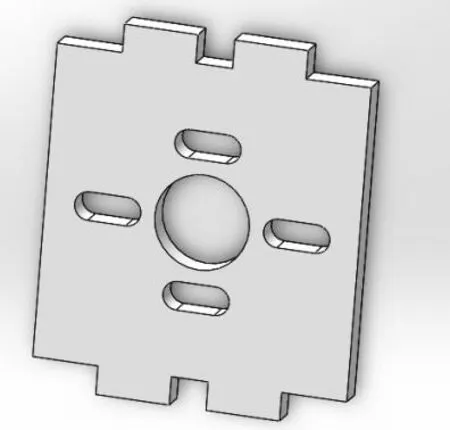
图2 电机底座
该底座采用的是碳纤维板,设计尺寸为40 mm×40 mm的正方形,上面4个椭圆形开孔是电机安装孔,上、下两边各有2个突出的矩形,安装时卡在上下底板之间,设计时上下底板已预留相应的空位,保证电机高速、稳定转动。
2.3 机臂组件设计
本方案设计的是6旋翼无人机,机臂采用的是碳管,机臂的长度为197.5 mm,机臂的外径为10 mm,内径为9 mm,具体如图3所示。

图3 多旋翼无人机机臂
将电机移至上下底板的中间,电机与螺旋桨之间需通过齿轮和传送带进行能量传递,需要在机臂顶端安装螺旋桨,因此需要设计1个安装螺旋桨的组件,用于安装螺旋桨并且能够安装在机臂上,具体设计如图4所示。
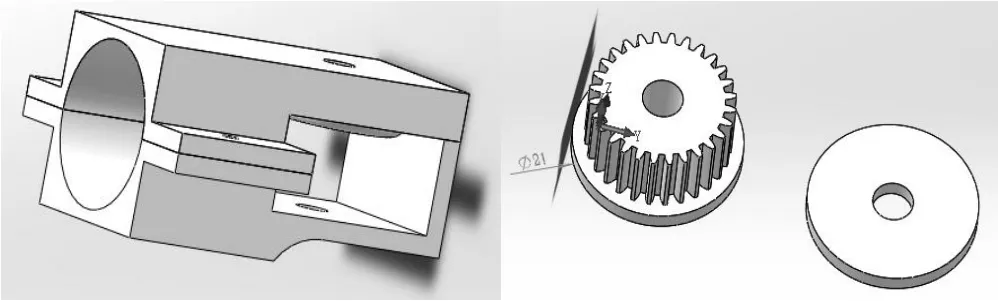
图4 安装螺旋桨组件
螺旋桨座组采用的是ABS塑料,原型机设计时采用3D打印技术实现,具体尺寸是57 mm×29 mm×29 mm。两侧伸出来的耳朵尺寸为25 mm×10 mm×6 mm,用螺丝将其与机臂夹紧固定。后面空出的位置用来放置螺旋桨传动齿轮。齿轮采用不锈钢,具体尺寸是圆片半径10.5 mm,内齿轮模数0.6,齿数28个,面宽8 mm,标称轴直径5 mm。
2.4 防雨罩设计
防雨罩是本设计的一个重要组成部分,主题思想是把6旋翼无人机的机体部分用防雨罩罩住,从而起到防雨效果,根据上下底板设计的尺寸设计的防雨罩如图5所示。

图5 防雨罩设计
考虑到防雨罩加装在多旋翼无人机上,为尽可能减轻质量,防雨罩采用玻璃钢,具体为半径127 mm的圆形,其上部的圆弧面顶半径为45 mm,该圆弧顶处可安装GPS,防雨罩的底部有1块底板,完全把多旋翼无人机的上下底板罩在防雨罩内部,实现了防雨功能。
2.5 电机传动装置设计
螺旋桨与电机的传动与传统装置不一样,螺旋桨转动轴下方安装了齿轮,电机采取卧式放置,电机的转动轴上也安装了齿轮,两个齿轮之间通过传送带连接,实现电机带动旋桨转动,传送带放置在机臂碳管内,如图6所示。

图6 电机传送装置
以上是本次设计的主体零部件部分,飞机的整体安装如图7所示。经过测试,能够满足常规教学要求,也实现了防雨要求。
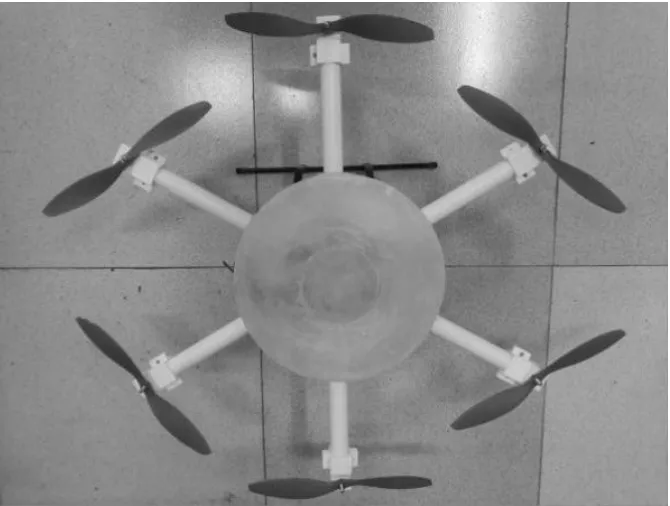
图7 多旋翼飞机整机
3 结论
本设计根据实际,结合综合因素,充分考虑了设计需求,实现了多旋翼无人机防雨功能,并已经应用到了实际教学中,效果良好。后期需要进一步细化,注意细节的处理,确保无人机飞行的安全性、稳定性,可以在此基础上增加一些功能,比如在该无人机底部增加机械爪,实现多旋翼无人机抓取任务,可以作为比赛训练机使用。
猜你喜欢
科学与财富(2021年34期)2021-05-10 13:54:34
商情(2020年39期)2020-09-22 10:20:20
航空发动机(2020年3期)2020-07-24 09:03:16
民用飞机设计与研究(2019年2期)2019-08-05 01:33:42
电子测试(2018年23期)2018-12-29 11:11:36
电子测试(2018年18期)2018-11-14 02:31:04
机械设计与制造(2018年9期)2018-09-17 09:27:32
中国公共安全(2017年7期)2017-10-13 08:18:11
计算机测量与控制(2017年6期)2017-07-01 16:24:24
广东造船(2015年6期)2015-02-27 10:52:46
