城轨门系统承载传动机构健康状态评估研究
2021-07-16 07:02杨欣薇朱松青薛宇豪祝子昊
南京工程学院学报(自然科学版) 2021年2期
杨欣薇,朱松青,杨 柳,薛宇豪,祝子昊
(南京工程学院机械工程学院, 江苏 南京 211167)
城轨交通系统具有运量大、速度快、干扰小的运输优点,能够有效分担都市快节奏的交通压力.城轨门系统在列车的运行过程中承担着通行客流的重要作用.由于列车行车密度日益提高,列车的开关门频率明显增加,各类门系统故障的发生也更为频繁.因此,城轨门系统的安全性与可靠性问题受到越来越多的关注.
城轨门系统承载传动机构作为车门运动的重要承载与传动机构,其在列车运行过程中需要完成高频次的重复动作,由于交变气动载荷与外力挤压等影响,较易产生故障[1].对城轨门系统承载传动机构的健康状态进行及时、准确的评估,可以有效排除相关安全隐患,从而提高列车运行的安全性和可靠性.
国内关于城轨门系统健康状态评估的研究成果有限,各类研究中对机构状态进行评估的实现方法较为传统,类似于故障树分析以及贝叶斯网络分析等分析方法,都较为依赖其历史数据或专家经验,且需要较为明显的故障现象作为分析依据,对于机构的早期故障难以进行有效识别.
针对这一问题,部分研究不再完全依赖于历史数据,而是尝试通过机器学习等方法,实现对机构状态的有效评估.支持向量机(SVM)是一类应用广泛的线性分类器,通过构建分类决策面来实现对各类数据的有效分类,具有良好的学习能力,对于机构的初期故障具有良好的识别效果.文献[2]采用完善后的SVM分类器对轨道车辆动态牵引系统各类运行状态进行了较为准确的预测.文献[3]将机构振动信号的多重分形谱作为SVM分类器的输入特征,有效识别出列车在运行过程中出现的减震器失效、空簧失效等多种典型故障状态.得益于核函数的使用,令SVM分类模型即使对于小样本分析对象也具有良好的分析效果.因此,本文在对城轨门系统承载传动机构进行健康状态评估时,采用SVM分类器实现对各类机构状态的预测分类.
相关文献在对数据进行分析的过程中,研究人员往往对机构的状态信号采取整段笼统分析的方法,忽略对于信号阶段特性的研究,这会导致部分有效信息的丢失,对评估效果的准确性产生一定影响.
本文以城轨门系统承载传动机构为研究对象,对其进行时间加速寿命试验,以试验中所采集的信号数据为基础,从数据驱动的角度,探究对于承载传动机构进行有效健康状态评估的方法.首先对试验数据提取时、频域特征参数;其次使用最大相关最小冗余(mRMR)方法以及主成分分析(PCA)算法对各特征参数进行有效的特征融合,构建承载传动机构健康状态的综合表征量;最终,通过构建SVM分类模型对承载传动机构的健康状态进行预测判断,并采用多阶段主元特征结合的方法对模型评估效果进行提升,实现对承载传动机构健康状态的有效评估.
1 试验数据采集
基于某轨道门系统制造企业所提供的承载传动机构历史故障数据,通过对其进行故障模式影响及危害性分析,得到其主要故障模式包括尼龙螺母断裂、丝杠毛刺卷边、扭簧卡滞、联轴器损坏、滚柱磨损.这几类故障均为承载传动机构的内部机械结构类故障,目前对于机械结构类故障的识别主要通过分析其振动信号来实现.因此,本文将承载传动机构运动过程中产生的振动信号作为主要分析对象,并通过合理布置传感器,搭建寿命试验平台,对承载传动机构的振动信号进行监测与采集.
以某城轨门生产企业所提供的城轨列车双开塞拉门系统为主要试验平台,选取上海澄科公司生产的CT1010SLFP ICP/IEPE型三轴加速度传感作为承载传动机构振动信号的主要采集部件.在对传感器的安装位置选择上,需要保证在不改变城轨门系统原有结构的情况下,所安装的传感器不会干涉车门系统中其他构件的运动,且不会干扰待测信号采集的有效性.使用三维仿真软件Solidworks绘制零部件三维结构图,通过调整零部件尺寸与门系统相关结构进行安装配合,同时模拟其运动轨迹,查看其与各零件之间是否产生干涉.确定最终的安装位置为承载传动机构的中间支撑座,如图1所示.
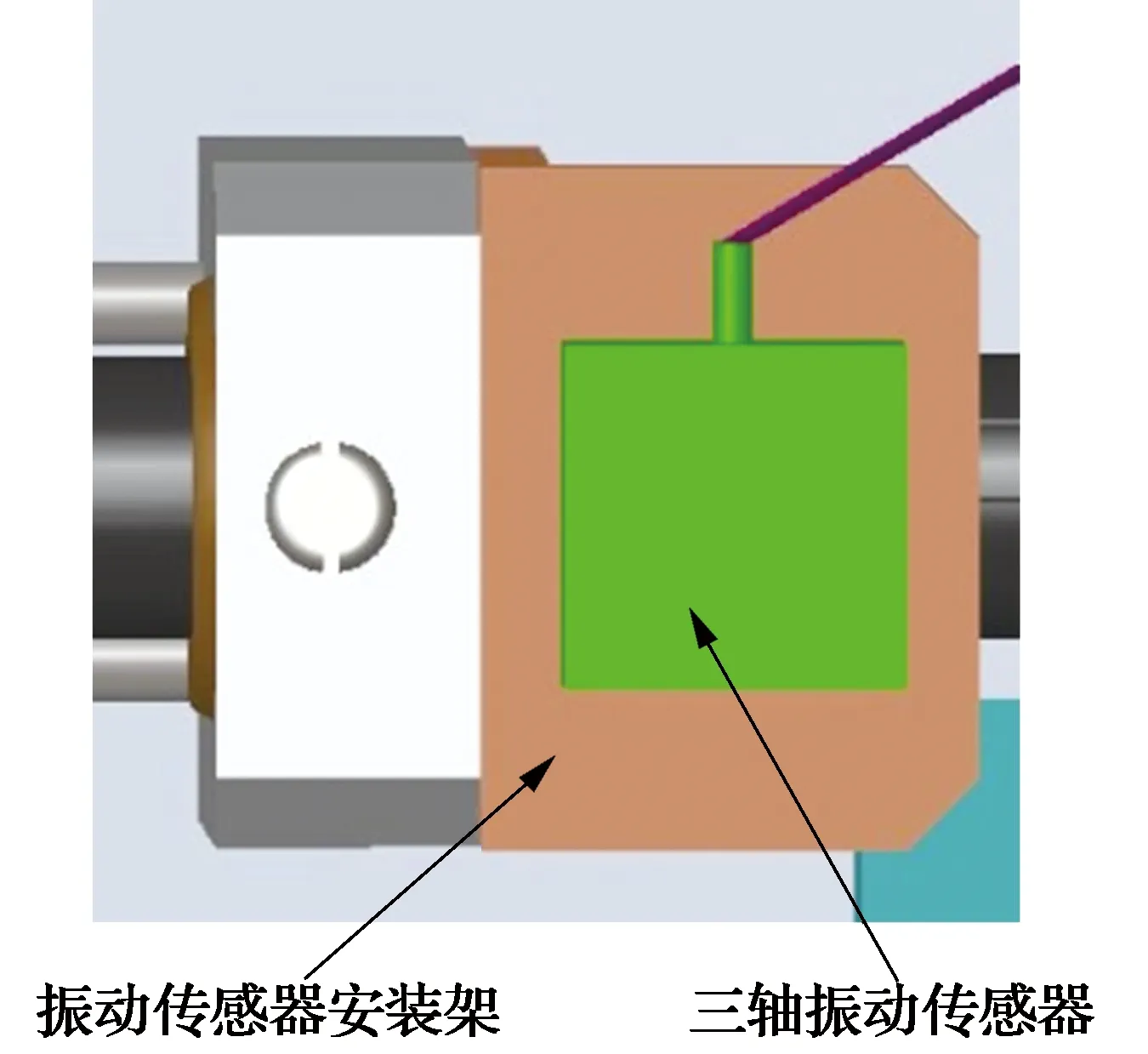
图1 振动传感器安装设计图
为了保证所安装的传感器在试验过程中能够具有一定的稳固性,还需安装辅助固定件.设计采用L型面板,将其中一面与承载传动机构的中间支撑架相固定,另一面与传感器相固定.与传感器固定的一面采用凹槽设计,可以保证传感器的垂直度与水平度,也能够避免在开关门过程中传感器晃动的情况,其实际安装效果如图2所示.
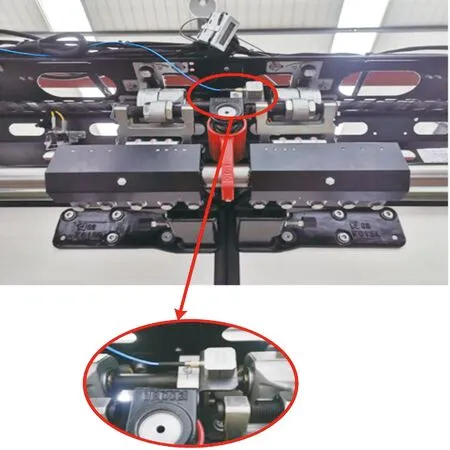
图2 振动传感器实际安装效果图
根据城轨车门系统的机械结构和日常运行情况,采用时间加速寿命试验的方式对承载传动机构进行寿命退化模拟试验.在试验过程中令门系统进行反复开关门运动,通过在一定时间内增加门系统的有效开合次数以达到加速机构寿命退化的效果.
整个时间加速寿命试验从2019年2月开始,至2019年12月结束,试验过程为期10个月,总共完成了约155万次完整的开关门过程,并通过振动传感器对每一次的开关门振动信号进行采集.试验过程中出现过两次较为明显的结构性故障:第一次故障出现在4月份前后,梅花联轴器的弹性垫片产生了磨损变形,开关门出现卡顿并伴有异响;第二次故障出现在9月份前后,皮带轮上的皮带出现碎屑脱落,原因是长期高载传动使部件间的配合出现空隙,从而在运动过程中不断产生冲击,造成皮带轮的疲劳破坏和塑性变形.这两类故障均属于承载传动机构的结构性故障,可作为本次承载传动机构健康状态评估研究的主要分析对象.
2 信号的时、频域特征参数提取
由于试验所采集的振动信号包括三轴振动信号,且开关门信号分开采集,因此,总共涉及六组不同的振动信号.根据信号稳定性及其对于承载传动机构各类健康状态的特征反映能力,选择Y轴方向的开门振动信号作为最终的分析信号,对其进行时、频域特征参数提取.
2.1 时域特征参数的提取
时域特征参数主要分为有量纲、无量纲两种.峰值、均方根、标准差、峭度等特征参数属于有量纲参数,峰值因子、脉冲因子、波形因子、裕度因子等特征参数属于无量纲参数[4].有量纲的特征参数对设备的运行工况较为敏感,易受外界环境影响[5],而无量纲的特征参数则受机械运行环境的影响较小,反映的是机械固有的运动特性.在试验周期内平均选取2 100组振动信号,对其进行时域特征参数提取,获得各参数变化趋势如图3所示.
由图3可知,峰值、标准差、峰值因子等统计量能够明显识别出联轴器故障变化,而均方根、峭度等统计量则对于皮带轮故障更为敏感.各特征参数对于各机构健康状态的识别能力各不相同,只依靠某一特征量实现对于承载传动机构的状态识别缺乏全面性与可行性.
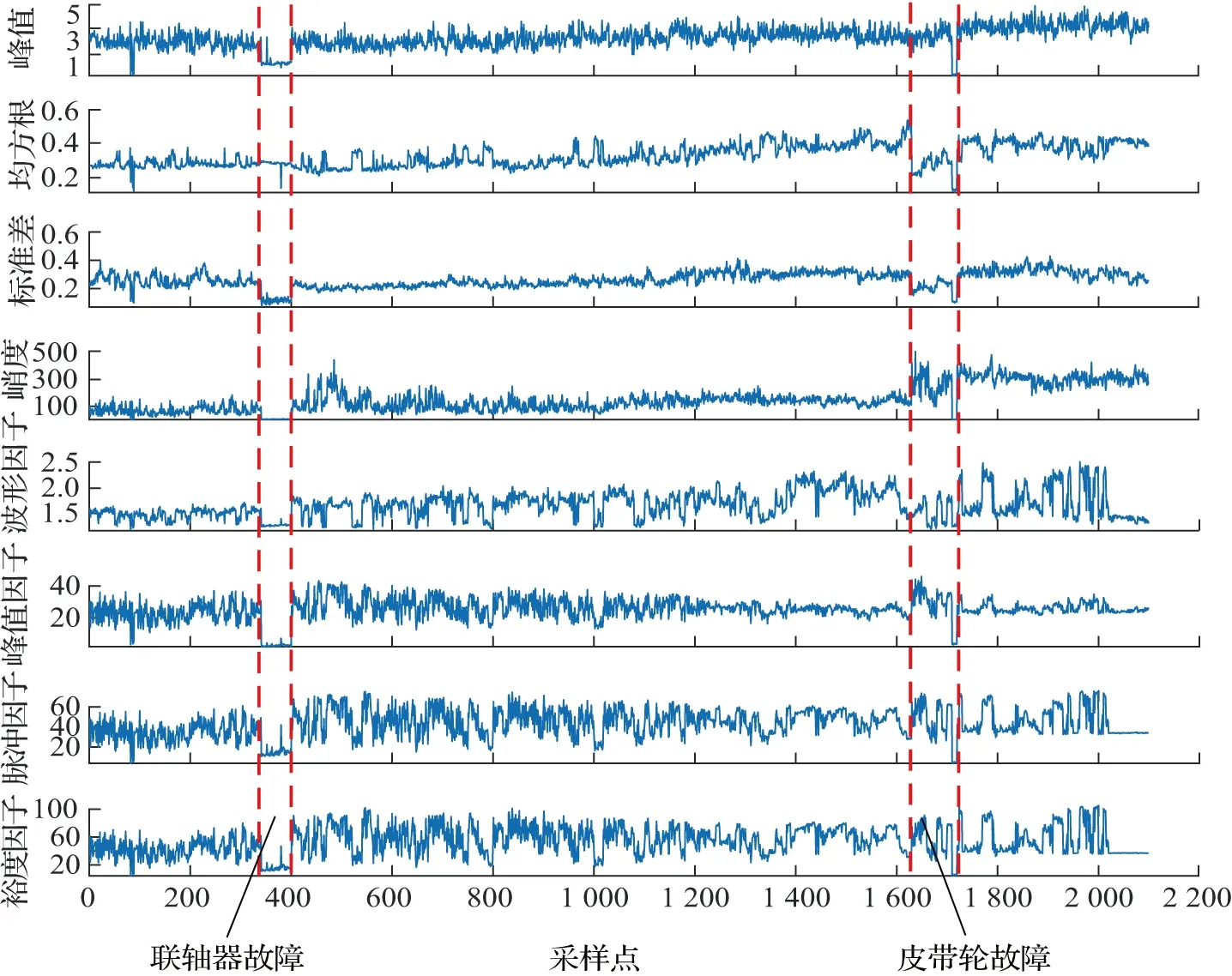
图3 时域特征参数趋势图
2.2 频域特征参数的提取
相较于时域特征参数的直观性,频域特征分析对于机构特征的反映则更具深刻性.频域特征分析的基础是信号的傅里叶变换,基于变换所得的频谱实现频域特征量的提取.常用的频域特征参数包括重心频率、频率均方根以及频率标准差.在试验周期内平均选取2 100组振动信号,对其进行时域特征参数提取,获得各参数变化趋势如图4所示.

图4 频域特征参数特征趋势
由图4中各频域特征的变化曲线可以看出:重心频率相较于其他特征波动较为平缓,在对机构状态的反映能力上,其对联轴器故障反映较为敏感,但对于皮带轮故障状态特征和正常运行状态特征容易产生混淆;频率均方根的变化趋势曲线显示其对应于各故障模式的波形特征区别模糊,不适合用于表征承载传动机构的状态变化;频率方差能够较为敏锐地反映联轴器故障,但是其波形整体表现嘈杂、波动较大.综上所述,单一特征量对于机构健康状态的反映能力有限,只凭某一特征量无法有效描述承载传动机构各健康状态.因此,通过特征融合的方法来综合多种特征参数的特征反映能力,从而实现对机构状态的有效评估.
3 机构健康状态综合表征量的构建
直接对各个特征进行无差别处理容易造成处理过程中的数据灾难和信息冗余.因此,首先使用mRMR算法对给各特征参数进行基于信息有效性的筛选,在此基础上使用PCA算法对各特征进行有效融合,构建能够全面反映承载传动机构各类健康状态的综合特征指标,作为后续SVM分类模型的主要输入量.
3.1 基于mRMR的有效特征参数筛选
基于mRMR的参数选取主要通过最大化特征集相关性D与特征冗余度R的互信息差φ来实现.
(1)
(2)

(3)
式中:xi为特征集S中的特征参数;c为目标参数;i为总特征个数;I(xi;c)为xi和c的互信息;I(xi;xj)为xi和xj的互信息.
按照各个特征参数与机构状态之间的Pearson相关系数对其进行降序排序,结果为:标准差、重心频率、波形因子、峰值、频率均方根、裕度、脉冲、峰值因子、均方根、频率标准差、峭度.其中,最后3个特征与机构状态之间的Pearson相关系数小于0.3,不满足特征参数有效性的选取要求,将其筛除,选择余下的特征参数构成初选特征参数集.
通过增量搜索法对初选特征参数集中的参数进行选取,由信号的标准差作为原始特征集,按照以上相关性排序,依次分别添加各特征量于原特征集,计算新构特征集的互信息差,结果分布如图5所示.由图5可知,当所添加的特征量是峰值时,新构特征集所对应的互信息差值最大,本次特征集构建过程中选择添加峰值实现新特征集的构建.
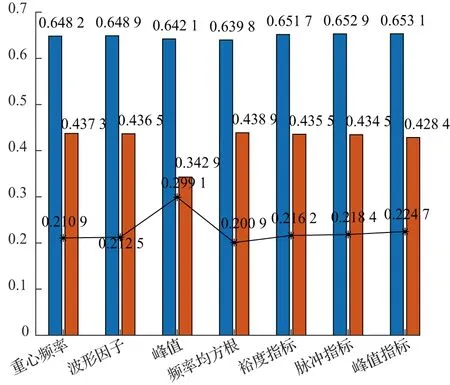
图5 各新构特征集的互信息差值分布图
按照以上方法扩充特征集,每次添加一个特征参数,直到以上所有的特征参数被包含于特征集中.最后依照特征参数添加的次序,计算其所对应特征集的互信息差,结果分布如图6所示.
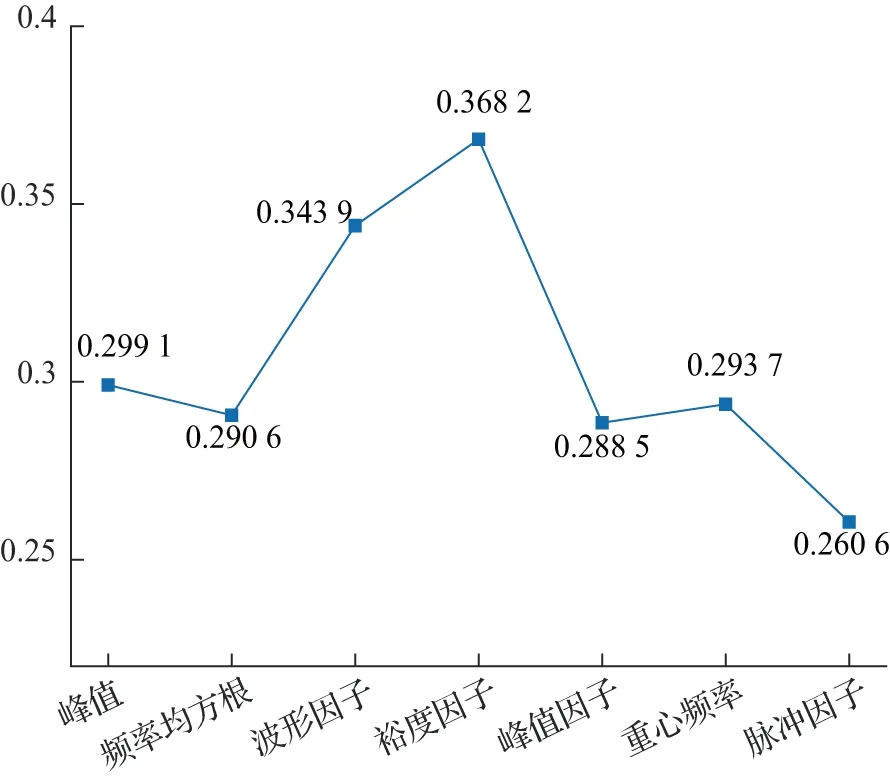
图6 特征参数集互信息差变化图
由图6可知,随着参数的逐次添加,特征参数集的互信息差值呈先上升后下降的趋势,当第四次添加特征值时,特征参数集具有最大的互信息差值,此时模型具有最优的状态预测能力.本文选择标准差、峰值、频率均方根、波形因子、裕度因子作为特征参数构成最终参数集,参与后续的特征融合处理.
3.2 基于PCA的振动信号特征融合
由于单个表征量对于承载传动机构各状态的反映能力都具有一定的局限性,因此,需要对参数进行有效融合,提取出能够全面、准确地表征机构运动状态的综合特征参数.
PCA是一种目前较为有效的线性降维方法,其主要使用正交变换的方式将原本具有一定相关性的数据集转换为一组线性无关的数据集,实现降冗余的目的[6].
首先,对前文筛选所得的特征参数进行归一化处理,得到其时域波形如图7所示;其次根据其协方差矩阵计算参数集的系数矩阵,通过系数矩阵进行特征值及对应特征向量的求解;最后使用求得的特征向量组对参数集进行正交变换,得到参数集所对应的主元特征,绘制第一主元至第四主元的变化曲线,如图8所示.

图7 归一化特征参数集

图8 主成分分析得到的前四个主元
对于有效主元特征的选择,本文使用主成分贡献法(CPV)来实现,CPV法主要是通过计算主成分分量方差贡献率Cp及累计方差贡献率Cs来进行主成分分量的选择.对各主元求解其主成分方差贡献率,结果如表1所示.
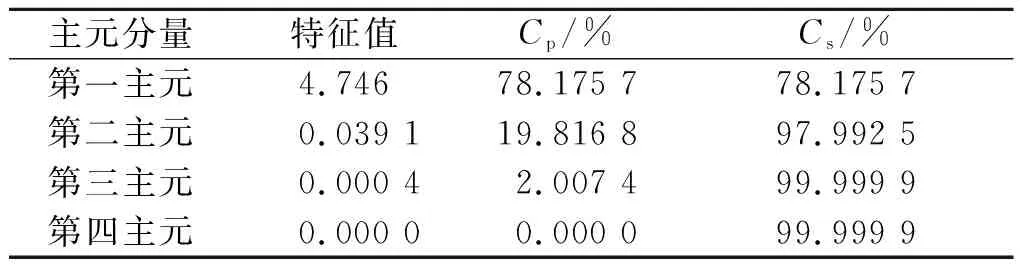
表1 主成分分析方差贡献率
通常当主元的累计方差贡献率Cs为90%时,已具备能够充分表达原始数据的能力.从表1可以看出,第一主元和第二主元的累计方差贡献率为97.992 5%,因此本文选取信号的第一主元和第二主元作为机构状态的综合表征量参与后续基于分类模型的机构状态评估.对比原特征集,有效减少了特征参数的个数,完成了数据的降维和去冗余.
4 承载传动机构健康状态评估模型的构建与优化
4.1 基于SVM的机构状态评估模型的构建
SVM分类模型主要通过监督学习的方法对线性可分的数据样本求解最大边距超平面,使得分类平面在实现正确分类的前提下能够保持样本之间的分类间隔最大[7].对于非线性可分样本,SVM通过核函数的方法将数据样本转换至更高维的希尔伯特空间,从而在高维空间求解分类决策函数[8].
根据试验过程记录,可获得三类承载传动机构的健康状态类型,第一类为联轴器故障,第二类为皮带轮故障,第三类为正常运行状态.从采集的试验数据中根据时间节点分别选取40组联轴器故障信号、40组皮带轮故障信号、140组正常运行状态信号构成训练集样本,选取30组联轴器故障信号、30组皮带轮故障信号、100组正常运行状态信号构成测试集样本.使用训练集样本对SVM模型进行分类训练,并基于训练完成的SVM分类模型对测试集样本的类别进行预测评估,得到的分类效果如图9所示.
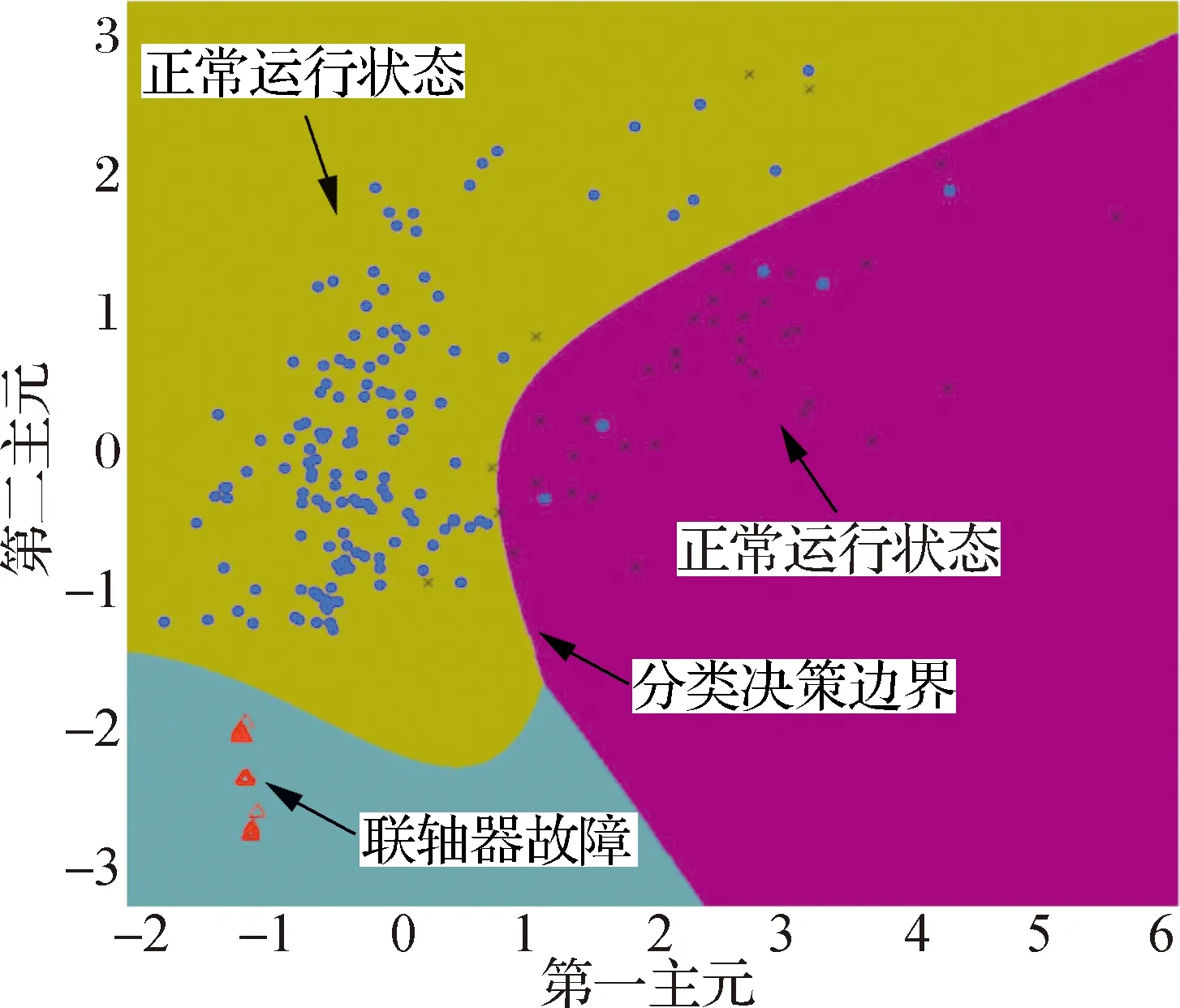
图9 训练样本分类边界图
由图9可知,训练得到的SVM分类模型对样本类别的预测能力存在差异,预测效果不够稳定,总体分类准确率为89.38%,能够满足系统对于分类准确的基本要求,但是分类效果仍有提升空间.
4.2 基于多阶段特征结合的模型评估效果提升
考虑到承载传动机构在城轨列车开关门过程中的阶段运动特性,本文对信号进行分阶段特征提取与分析,在此基础上,通过多阶段主元特征结合,提升模型评估的有效性.
城轨列车门系统在运动过程中,门扇主要经过加速、匀速、减速、再匀速、停止的运动过程,运动曲线如图10所示,对应的振动信号时域波形如图11所示.

图10 开门过程门扇运动曲线图
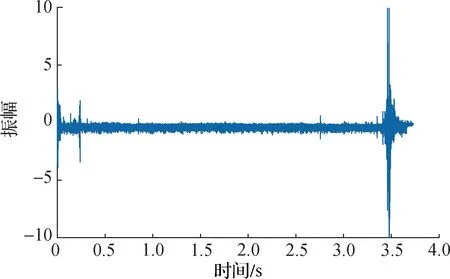
图11 振动信号波形图
结合门系统的开关门运动曲线与振动波形特征,可以将机构的运动过程划分为三个阶段:第一阶段为启动运行阶段,对应于第0—5 000个采样点,该阶段内门扇进行加速启动,造成机构的振动与冲击,对应的振动信号振幅较大,波动明显;第二阶段为平稳运行阶段,对应于第5 001—30 000个采样点,该阶段内门扇进行匀速平稳滑动,对应的时域信号趋势平稳,振幅较小,且表现出周期性波动特征;第三阶段为锁到位停止阶段,对应于第30 001—35 000个采样点,该阶段主要是完成门扇的制动停止操作,过程中会产生较大的瞬间扭矩,导致丝杆、螺母副等机构的振动,信号波形尖锐且幅值较大,表现出较为强烈的振荡与冲击.
使用单独分段信号对承载传动机构进行健康状态的评估,在此基础上分析各段信号对于承载传动机构状态特征的反映能力.本文使用ROC曲线对评估模型的预测能力进行判断,从而对各分段信号的状态评估能力进行描述.
ROC曲线是常用的分类模型有效性评估指标,是经过遍历分类模型对应于不同阈值的真正率(FPR)和假正率(TPR)进行绘制所得,通过计算ROC曲线下的面积-AUC值可以实现对模型分类效果的评估[9].AUC值为0.5~0.7表示模型不具有有效的评估能力;AUC值为0.7~0.85表示模型具有良好评估能力;AUC值为0.85~1表示模型具有优秀的评估能力.
绘制联轴器故障、皮带轮故障、正常运行状态下基于各分段信号所构建的SVM分类模型的ROC曲线,绘制过程中设置模型的分类阈值集合为[0.1,0.2 ,0.3,0.4,0.5,0.6,0.7,0.8,0.9,1.0],得到ROC曲线如图12、图13、图14所示,根据ROC曲线计算对应的AUC值,结果如表2所示.

图12 联轴器故障分类模型ROC曲线

图13 皮带轮故障分类模型ROC曲线

图14 正常运行状态分类模型ROC曲线

表2 各模型分类的AUC值
由图12、图13、图14可知,对于联轴器故障,第三阶段信号所对应的分类模型其ROC曲线位于其余曲线之上;对于皮带轮故障,第二阶段信号所对应的分类模型其ROC曲线位于其余曲线之上;对于正常运行状态,第三阶段信号所对应的分类模型其ROC曲线位于其余曲线之上.
根据表2中由各ROC曲线计算得到的AUC值,可以判断各分段信号的分类特性:第一阶段信号所对应的分类模型各项AUC值均低于0.7,不具备有效的分类能力;第二阶段信号所对应的分类模型对皮带轮故障的AUC值为0.863,说明该段信号对于皮带轮故障具有较为优秀的预测能力;第三阶段信号所对应的分类模型对于联轴器故障的AUC值为0.882,对于正常运行状态的AUC值为0.907,说明该段信号能够良好预测联轴器故障和正常运行状态这两类机构状态.
基于CPV法则,选择主成分贡献率分别为92.2%的第一阶段信号第一主元、75.5%的第二阶段信号第一主元、21.4%的第三阶段信号第二主元构成新的特征参量组,作为SVM分类模型最终输入量,实现信号的多阶段特征结合.
只使用第一阶段信号第一主元,第二阶段信号第一主元作为SVM的输入量对样本数据进行分类时,得到二维分类决策面如图15所示,图15中显示正常运行状态与皮带轮故障之间的分类界限模糊,样本分类区域出现重叠覆盖的现象.

图15 二维特征SVM分类效果
使用新构建的三维特征参量组对样本数据进行分类,得到其决策分类面如图16所示.对比二维分类效果,该分类模型通过在三维空间寻找最优决策超平面,有效解决了二维平面中样本点难以区分的问题,增强了分类模型对于承载传动机构各类状态的分类预测能力.结果显示,基于多阶段主元特征结合所构建的SVM分类模型对于机构状态特征的分类准确率达到95.63%,相较之前的整段信号特征提取,其分类效果得到了显著提升.
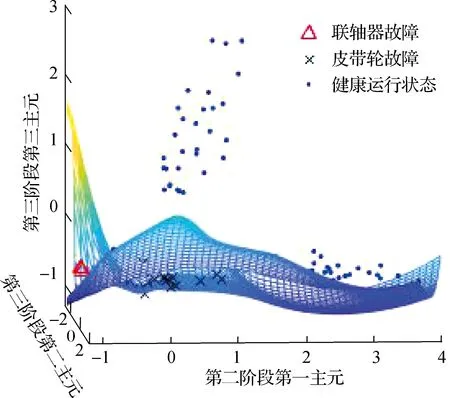
图16 三维特征SVM分类效果
5 结语
本文首先对承载传动机构进行时间加速寿命试验,在此基础上,实现数据信号的采集.其次采用mRMR和PCA算法相结合的方式对信号提取能够有效表征机构状态的综合特征量,作为后续模型分类的主要输入参量.对于数据样本的最终分类,本文采用SVM分类器构建承载传动机构的分类模型,并通过多阶段主元特征结合的分析方法,实现评估模型分类效果的有效提升.试验结果表明,本文所构建的承载传动机构健康状态评估模型在对机构各类健康状态进行分类时不仅具有较高的分类准确率,而且具有较高的评估稳定性,可为后续研究提供相应参考.
猜你喜欢
物流技术与应用(2022年8期)2022-08-26
汽车实用技术(2022年14期)2022-07-30
舰船科学技术(2022年10期)2022-06-17
杭州电子科技大学学报(自然科学版)(2020年6期)2020-12-03
初中生学习指导·提升版(2020年11期)2020-09-10
文理导航(2018年2期)2018-01-22
数学学习与研究(2016年21期)2017-05-08
电子技术与软件工程(2016年22期)2016-12-26
汽车实用技术(2015年8期)2015-12-26
汽车实用技术(2015年8期)2015-12-26