
一种新型食用甘蔗自动去皮装置的设计与研究
2021-07-16 07:29:58黄才贵常青青蒋正忠刘兴国
包装与食品机械 2021年3期
黄才贵,常青青,蒋正忠,刘兴国
(南宁学院,南宁 530200)
0 引言
甘蔗所含的微量元素以及糖分,对人体具有一定的保健防护作用[1-3]。蔗糖作为重要的制糖原料,是我国白糖加工的主要来源[4]。甘蔗在使用或者榨汁之前,一般要先去皮,以保证所食用部分的卫生。在制糖工艺中,往往会先添加很多化学剂,以去除甘蔗表面杂质或者污物造成的甘蔗汁悬浮物。如果先对甘蔗做去皮处理,可先去除大量的杂质和污物,进而降低榨出蔗汁所含的悬浮物浓度,减少化学药剂的使用[5]。
目前甘蔗去皮方式主要还是以人工为主,利用削皮刀对甘蔗进行削皮[6]。而人工去皮的方式,劳动强度大,效率低且容易划伤手,存在一定的安全隐患[7-8]。基于此,设计出一款经济实惠、可靠性高,且能有效去皮的甘蔗去皮装置,有利于提高甘蔗在食用或工业加工前的去皮效率,减轻劳动强度。
1 装置的总体结构及原理
1.1 整机结构
如图1所示,甘蔗去皮装置包括底座、电机、去皮机构、支撑槽、切断机构、传动机构和甘蔗转动机构。电机、支撑槽、切断机构、传动机构、甘蔗转动机构均安装在底座上,去皮机构位于支撑槽上方,并与传动机构连接。电机上设有主动轮A,主动轮A通过同步带A与传动机构连接,甘蔗转动机构安装在支撑槽一端,切断机构安装在支撑槽的另一端。支撑槽的一端设有滑轨,通过其与去皮刀架连接,提高去皮刀架进行往复运动时的稳定性。支撑槽一端设有积屑槽,积屑槽与支撑槽长度相同,并通过螺丝与支撑槽连接。去皮刀削下的皮通过积屑槽收集,以保持工作区域的清洁。
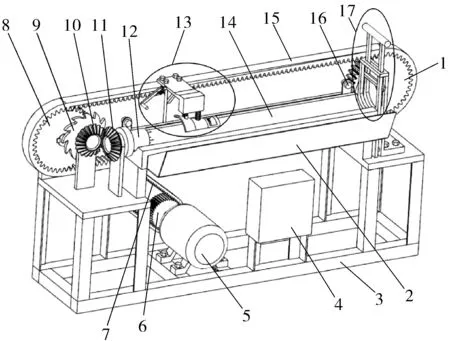
图1 装置的整体结构图Fig.1 Overall structure drawing of the device
1.2 整机的工作原理
装置工作时,将甘蔗放置于支撑槽上,甘蔗的一端插在圆柱块的固定钉上,启动电机经过传动机构带动去皮机构沿着同步带B向棘轮移动,当感应铁块分别到达两个感应开关时,感应开关感应到信号并将此信号传送到控制箱,控制电机停止转动,保持1秒后,再控制电机反转,如此去皮机构往返运动保证了去皮刀切削和回位过程。在切削过程,当去皮机构运动靠近棘轮时,拨杆进入棘轮齿,当去皮机构回位时,拨杆拨动棘轮上方的棘爪,带动棘轮转动一个角度,再经过主动锥齿轮和从动锥齿轮带动圆柱块转动,进而带动甘蔗转动一个角度以备下次切削。切削出来的甘蔗皮落入积屑槽内以便收集。经过六次往复的切削过程,甘蔗皮被切削干净,再利用切断机构切成段,完成甘蔗的去皮切段工作。
2 装置的关键结构设计
2.1 传动机构设计
如图2所示,传动机构包括主动轮A、主动轮B、从动轮A、从动轮B,从动轮B通过轴座D安装在底座上,从动轮A通过轴座A安装在底座上,从动轮B和从动轮A通过同步带B连接,从动轮A上附有主动轮B,两轮同轴连接,且主动轮B通过同步带A与主动轮A连接,主动轮A通过电机控制带动主动轮B,使同步带B可以往复地直线运动,从而为去皮机构提供动力。

图2 传动机构Fig.2 Transmission mechanism
2.2 甘蔗去皮执行机构设计
甘蔗去皮执行机构如图3所示。

图3 甘蔗去皮执行机构Fig.3 Sugarcane peeling actuator
甘蔗去皮执行机构主要包括去皮刀架、去皮刀和拨杆,去皮刀架通过螺纹连接安装在同步带B上,去皮刀一端与去皮刀架铰接,且去皮刀中部通过压紧弹簧与去皮刀架连接,拨杆铰接在去皮刀架一侧,拨杆中部与去皮刀架之间设有回位弹簧,去皮刀架上设有感应铁块,去皮刀的刃口与水平面夹角为倾斜。去皮时,压紧弹簧使去皮刀紧贴在甘蔗上,去皮机构前进时,去皮刀的刃口朝向去皮机构的运动方向,将甘蔗皮削下。在去皮机构后退时,去皮刀的刃口背对去皮机构的运动方向,沿着甘蔗滑动,不进行去皮工作。在往复运动时,通过拨杆拉动棘轮,每次都可以使甘蔗旋转60°,从而可以对甘蔗进行360°去皮,将甘蔗削净。
2.3 甘蔗旋转控制机构设计
如图4所示,甘蔗旋转控制机构包括棘轮、主动锥齿轮、从动锥齿轮和圆柱块。棘轮通过拨杆动作,与主动锥齿轮同轴连接,且两轮通过轴座B安装在底座上,主动锥齿轮与从动锥齿轮相互啮合,从动锥齿轮与圆柱块同轴连接,且都通过轴座C安装在底座上。如图5所示,圆柱块上设置有多根固定钉,主要功能是将甘蔗端插到固定钉上,实现甘蔗的轴向固定,在圆柱块旋转时,可以带动甘蔗一同旋转,使切削机构对各个径向的甘蔗表面进行切削。
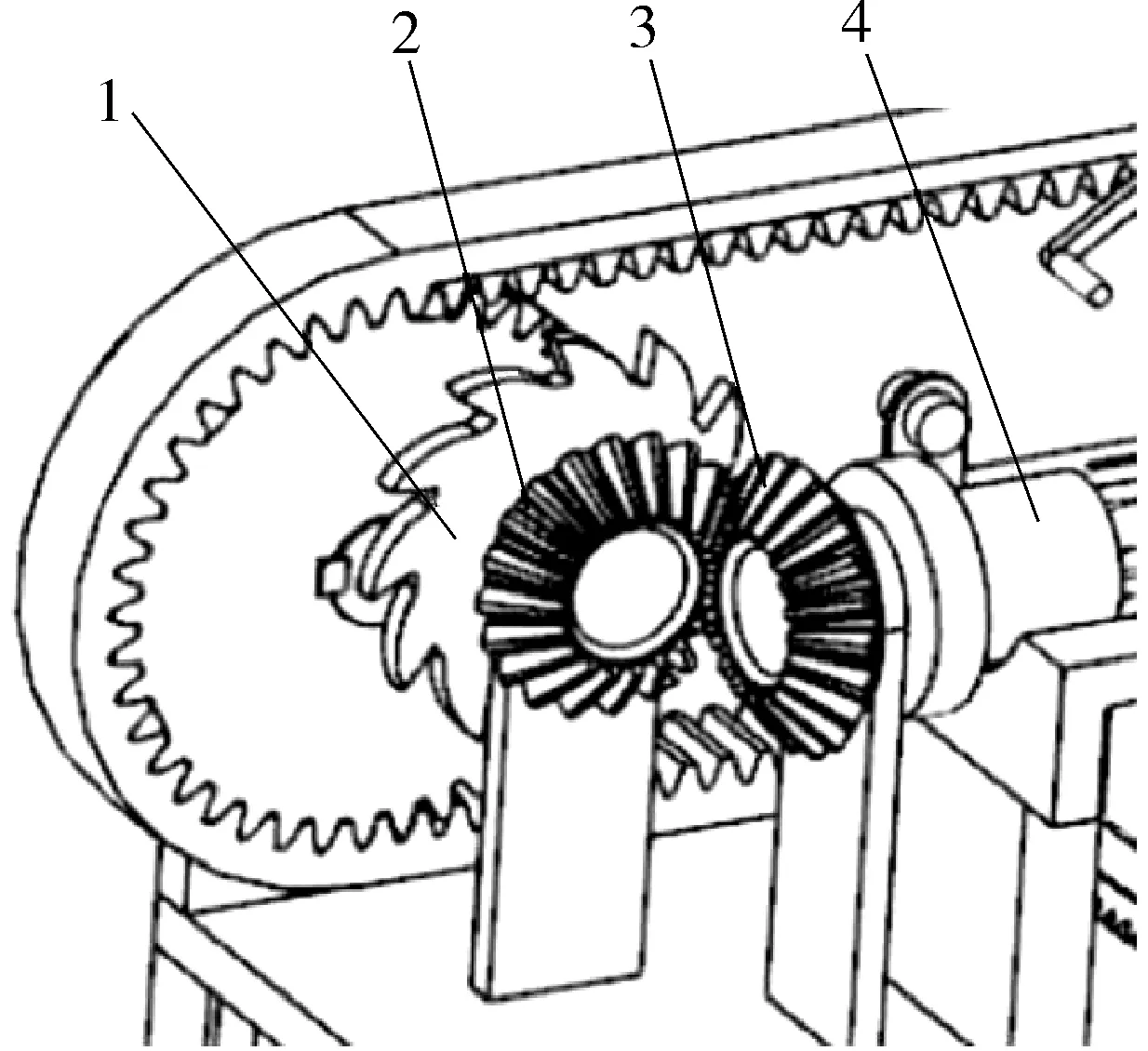
图4 旋转控制机构Fig.4 Rotary control mechanism
在切削过程,当去皮机构运动靠近棘轮时,拨杆进入棘轮齿。当去皮机构回位时,拨杆拨动棘轮上方的棘爪,带动棘轮转动一个角度,再经过主动锥齿轮和从动锥齿轮带动圆柱块转动,进而使甘蔗转动,完成对甘蔗进行360°的去皮,将甘蔗削净。
2.4 切断机构设计
切断机构包括切断刀和切断刀架,切断刀滑动安装于切断刀架上,切断刀架底部通过螺纹连接固定安装于底座上,需要切断甘蔗时,只需要将切断刀下压将甘蔗切断,提高劳动效率。
3 检测控制方案设计
控制箱安装在底座下部,通过导线分别与电机、感应开关连接,通过感应开关的信号控制电机的转向,使去皮机构可以进行往复运动。其检测控制流程如图5所示。

图5 检测控制流程Fig.5 Detection and control process
支撑槽两端均设有感应开关,感应开关1靠近切断机构位置的,感应开关2靠近圆柱块位置,感应开关与感应铁块处于同一水平面上,去皮机构带动感应铁块运动到感应位置时,感应开关向控制箱发送信号,使电机反转,实现去皮机构的往复运动。同时感应开关的位置可以调整以适应不同长度的甘蔗。
4 机械运动协调设计
4.1 甘蔗去皮工艺流程分析
甘蔗放置到位后,需要经过六次间歇地去皮和旋转换位,最后完成整周的去皮工作。
4.2 机械运动循环图设计
为了使得各个执行机构能够相互配合、相互协调来完成既定的工艺动作,从而提高生产效率,需要进行运动循环的设计[9]。甘蔗去皮执行机构和旋转控制机构之间,需要进行运动循环的设计,保证去皮工作和旋转动作能够正常、安全、高效地完成协调运动配合,避免发生干涉。根据甘蔗去皮的工艺流程,得出甘蔗去皮装置关键机构的机械运动循环图,如图6所示。AB段为甘蔗去皮执行机构的回程,BC段为去皮工作行程,DE段为甘蔗旋转控制机构静止等待阶段。

图6 机械运动循环图Fig.6 Mechanical motion cycle diagram
5 性能试验与结果分析
试验选择90根可食用黑蔗作为对象,进行甘蔗去皮性能测试。具体试验方案为:将90根甘蔗分30批次,每批次3根,记录每一批次甘蔗去皮的平均干净度。得到甘蔗去皮试验的总平均干净度。从试验过程及结果可知:该装置能够通过棘轮机构实现甘蔗旋转控制机构对甘蔗的旋转操作,并能实现与甘蔗去皮执行机构的良好运动协调。甘蔗的去皮干净度均达到78%以上,总平均去皮干净度达到91.17%,去皮的效果明显,达到设计要求。去皮干净度未能达到100%,分析其主要原因是少量甘蔗的径节比较突出或者弯曲,导致去皮过程中切削深度不够,造成漏去皮现象。
6 结语
所设计的新型食用甘蔗自动去皮装置,通过电机控制去皮机构进行往复运动,用于甘蔗去皮切段工作,可以极大地提高工作效率。该装置结构简单但巧妙合理、操作方便、运行稳定,可实现甘蔗360°干净去皮,工作效率和安全性高。本装置的设计一定程度上填补了目前市场上甘蔗去皮机械化的空白,为今后甘蔗削皮自动化提供一定的技术基础和参考。
猜你喜欢
橡塑技术与装备(2021年17期)2021-09-04 13:12:00
东北大学学报(自然科学版)(2021年1期)2021-01-15 09:30:14
装备机械(2020年3期)2020-09-29 14:23:10
机械管理开发(2020年1期)2020-03-14 10:26:16
少儿科学周刊·少年版(2020年9期)2020-03-04 11:38:12
绿色科技(2019年22期)2019-12-30 09:48:15
高考·上(2019年1期)2019-09-10 13:11:01
机械研究与应用(2015年3期)2015-08-21 05:14:12
电气化铁道(2015年2期)2015-06-29 10:05:39
科技资讯(2014年23期)2014-10-20 11:18:42
