
基于RFID技术的食品物流车辆管理系统设计
2021-07-16 07:29:56韩雪娜
包装与食品机械 2021年3期
韩雪娜 ,李 晖 ,2
(1.哈尔滨商业大学 计算机与信息工程学院,哈尔滨 150028;2.黑龙江省电子商务与信息处理重点实验室,哈尔滨 150028)
0 引言
无线射频识别(RFID)技术是典型的非接触式自动识别技术,通过无线射频信号自动采集电子标签上的数据信息,利用电感耦合和电磁辐射等方式,将标签信息传送至读写器系统中,通过上位机系统进行后续的信号处理[1]。射频识别全过程无需人工干预,信号强度大,接收范围广,RFID发展至今技术已成为21世纪最有前景的信息技术之一,广泛适用于库存管理和运输调度等物联网应用领域[2-4]。
在现代物流运输过程中,考虑食品类产品保存周期短,生产流通快,运输损耗严重等特点,要求食品物流车辆管理应该具备快速性、安全性和可靠性。因此,提高食品物流场区运作效率对加快商品流转速度,保障食品经济稳定发展起到较为重要的作用[5]。邹毅峰建立了无成本约束和有成本约束的食品物流系统优化决策模型,并根据模型的特点给出了求解的启发式算法[6];王兴家在对冷链物流的特征、流程、存在的问题的研究基础之上,开展了生鲜食品冷链物流配送的优化研究[7];王梅对食品安全追踪物联网的工作原理与组成进行了分析研究,提出了一种基于物联网的食品物流安全追踪方法[8];邹饶邦彦通过对配送中心的储运流程分析,得出在使用RFID系统后改进的运营流程,基于RFID的优化模式[9]。传统接触式人工识别方法识别速度较慢,精度不高,标签易损耗,存在诸多弊端,已满足不了现代食品物流业的要求,基于此,将RFID技术引入食品物流管理,设计基于RFID技术的食品物流车辆管理系统对于保证产品运输安全,加快食品行业流通有着重要的理论研究价值[10-12]。
1 系统总体架构
食品物流车辆管理系统对待入物流园区的车辆身份进行识别,自动获取车辆信息,同时根据车载食品的安全和食用条件,对车辆的调度优先级进行区分。优先对级别较的地认证车辆进行车位引导,帮助车辆快速安全地停靠合理位置,方便食品货物的及时装运和存储。基于RFID技术的食品物流车辆管理系统由车辆识别系统和车辆定位系统两个子系统组成,其中车辆识别系统包括射频识别模块,通信模块和机械动作模块三部分;车辆定位系统包括车位探测模块,车位控制模块,信息显示模块和车位诱导管理模块四部分,系统总体架构如图1所示。

图1 系统总体架构Fig.1 Architecture of management system
1.1 车辆识别系统
车辆识别系统依据无线射频识别技术信息传导原理,通过读写器获取相关食品物流车辆上的电子标签信息,在确认车辆身份之后,操纵机械动作开关予以放行,同时通过数据库搜索记录车辆相关信息数据,并上传资料到应用服务器进行车载食品信息比对,在物流车辆管理云平台上更新相关车辆的位置信息的同时,根据车载食品的安全实用条件(包括保质期,冷冻期,运输周期等)对车辆优先级进行区分,以期实现车辆的物联互通和迅速引导。
1.2 车辆定位系统
在完成车辆识别任务后,食品物流车辆驶入配送场区,通过车辆定位系统,实现准确快速的车位引导[13]。针对食品物流过程的特殊性,在车辆优先级划分的基础上,对当前物流园区空闲车位进行判断,同时实现不同食品运输周期要求的物流车辆分类定位引导:对于食品运输周期要求短时的车辆完成近位引导:即定位系统引导车辆泊入距离园区入口处较近的空闲车位,方便装卸和转运;对于食品运输周期要求宽泛的车辆实现远位引导:即定位系统引导车辆泊入距离园区入口处较远的空闲车位,为紧急运输车辆预留近位空间,实现高效车位诱导
1.2.1 车位探测子系统
车位探测子系统用于指示车位使用状态,由车位状态指示灯、信号采集收发器和车位信息探测传感装置等基本模块组成。车位信息探测传感装置通过超声反射回波方法实时计算障碍物距离,进而对监测车位的车辆停放状态进行判断,同时根据车位当前使用情况控制车位指示灯的显示颜色,不同颜色反映车位占用情况,保证50米距离范围可见,帮助车辆迅速定位。
1.2.2 车位控制子系统
车位控制子系统是整个引导系统的控制核心,完成包括数据采集、信号传输和对象控制等基础功能,通过计算不同区域的车位动态时变,及时有效地更新信息显示系统的车位数目,通过串行连接线将相关操作数据上传到二级服务器,可以在管理终端上实时测算车位情况。同时控制子系统具备自我检测检查功能,可以通过自检程序对故障设备进行定位和告警,并通过管理终端告知维修人员对系统进行维修维护[14-15]。
1.2.3 信息显示子系统
车位信息显示子系统通过显示屏动态显示食品物流园区可用车位数的实时变化情况,引导显示屏有三部分组成,其中入口显示屏标识全区域车位变化,区位显示屏标识不同区域的车位变化,交叉路口显示屏标识不同行车方向上的车位变化。
1.2.4 车位诱导子系统
车位诱导管理软件通过电子地图显示车位状况,对于动态物流车辆管理实施停车超时告警和设备故障报警,同时兼有VIP车位管理。通过事件记录表和历史记录表单内部信息加载,最终形成图表方式报告表方便查验。
2 系统硬件结构
基于RFID技术的物流车辆管理系统硬件结构主要包括RFID读写模块、通信模块和机械动作模块,见图2。
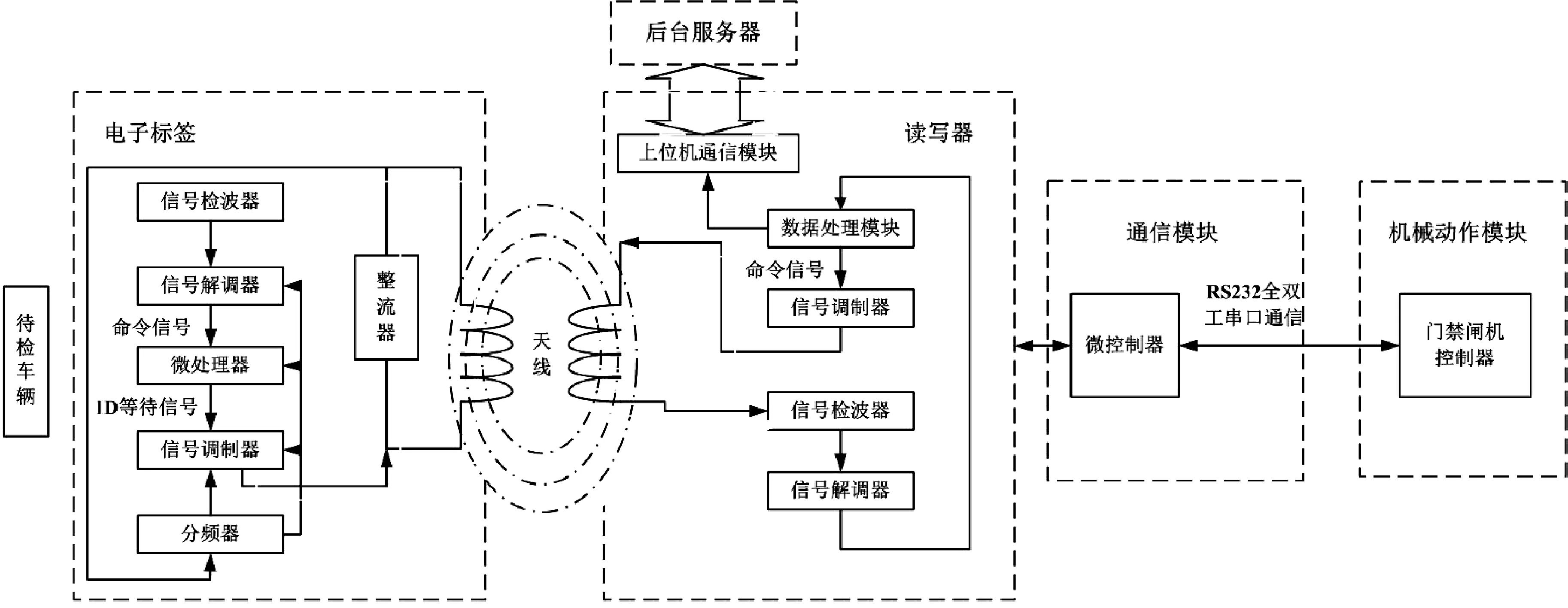
图2 系统硬件结构Fig.2 Hardware structure of management system
RFID读写模块包括电子标签和读写器,考虑车辆运行速度和信号覆盖宽度,物流管理系统中电子标签采用频率为2.4GHz的有源标签,同时匹配对应的2.4G读卡器系统,实现车辆身份信息的快速检测。通信模块负责RFID读写器和服务器之间进行RS232全双工数据通信[16]。机械动作模块根据RFID读写模块的身份识别结果对入场门禁闸机进行控制[17],完成物流车辆的自动入场和车位引导。
读写器是RFID系统中最重要的基础设施,一方面,RFID标签返回的电磁信号通过天线进入读写器的射频模块中转换为数字信号,再经过读写器的数字信号处理单元对其进行必要的加工整形,最后从中解调出返回的信息,完成对RFID标签的识别和读/写操作;另一方面,上层中间件及应用软件与读写器进行交互,实现操作指令地执行和数据地汇总上传。在上传数据同时,读写器会对RFID标签原子事件进行去重过滤或简单的条件过滤,将其加工为读写器事件后再上传,减少与中间件及应用软件之间数据交换的流量[18-19]。
3 系统软件流程
食品物流车辆管理系统的软件流程见图3。主要过程如下所述:

图3 系统软件流程Fig.3 Software flow of management system
(1)开启RFIDThread线程:无线射频传输程序启动,实现RFID通信信号的接收和相关数据的发送。
(2)开启有源2.4GHz线程:RFID信号遵循ISO14443协议,规定邻近卡(PICCs)进入耦合设备(PCDs)时的轮寻,通信初始化阶段的字符格式,帧结构,时序信息,允许多标签进入读写器范围,从中进行合理选择。
(3)车辆在线检测和监听:以10 ms为周期对物流车辆电子标签信息进行监听,同时规定非接触的全双工块传输协议,并定义了激活和停止协议。
(4)解析串口帧数据:在判断帧数据格式是否正确的基础上,获取车辆身份标签号;匹配预设车辆卡号成功后,显示车辆信息,为后续车辆定位奠定基础[20]。
4 关键事件分析
基于RFID的食品物流车辆管理系统利用无线射频识别信号实现可编程控制器(PLC)与标识信息间的数据传输,完成非接触式目标识别与跟踪。
5 系统实现
食品车辆上配置的电子标签上电后,按照预设规则周期性的进行信号发射,当RFID标签进入读写器的作用区域,阅读器获取到标签发射出来的信息,完成了对标签的识别过程,同时将入场车辆信息显示在相应的身份识别管理系统中,依据物流车辆装载物品的食品特性对其进行优先排序。通过对空闲车位进行判断,针对食品运输周期要求短时的车辆就近引导泊入空闲车位,方便装卸和转运;针对食品运输周期要求宽松的车辆引导泊入距入口处较远的指定车位,为紧急运输车辆预留车位空间,实现高效车位诱导。综合车辆识别和车辆定位,最终保证食品物流车辆地快速引导。
6 结语
在分析当前食品物流运输时间较长、运转效率不高等问题的基础上,分析无线射频识别技术在车辆管理中应用的优势,设计了一种基于RFID技术的食品物流车辆管理系统,在完成车辆身份信息自动识别的同时,实现了物流场区车位的快速诱导。相对于传统的人工物流管理,本文设计的自组织管理系统功能丰富完善,对象识别准确,运行稳定可靠,在保证精度的条件下提高运营速度,具有较高的市场应用前景。
猜你喜欢
舰船科学技术(2022年21期)2022-12-12 08:06:44
汽车画刊(2020年5期)2020-10-20 05:37:35
铁道通信信号(2020年3期)2020-09-21 09:13:00
祝您健康·文摘版(2020年3期)2020-04-09 04:47:27
铁道通信信号(2018年8期)2018-11-10 05:15:44
现代家长(2018年11期)2018-01-05 11:22:22
中国交通信息化(2014年4期)2014-06-05 03:51:10
铁路通信信号工程技术(2014年1期)2014-02-28 16:55:27
北京航空航天大学学报(2013年6期)2013-12-19 08:58:16
电子科技大学学报(2011年3期)2011-02-10 05:45:10
