一种鱼雷加速度计零偏现场标定方法
2021-07-14 07:29宋喜发张秦南王立文国琳娜
水下无人系统学报 2021年3期
阮 卫, 郝 喆, 宋喜发, 张秦南, 王立文, 国琳娜
一种鱼雷加速度计零偏现场标定方法
阮 卫, 郝 喆, 宋喜发, 张秦南, 王立文, 国琳娜
(中国船舶集团有限公司 第705研究所, 陕西 西安, 710077)
针对鱼雷惯性测量组合需定期拆卸标定的问题, 文中提出一种适用于鱼雷惯性测量组合的免拆卸标定方法。在静基座条件下, 以速度误差作为观测量建立卡尔曼滤波模型, 先估计现场失准角后估计天向加速度计零偏, 结合3个不同位置的姿态矩阵和天向加速度计零偏, 完成对惯性测量组合加速度计零偏的求解。仿真结果表明, 该方法有效可行, 可为鱼雷现场免拆卸标定提供借鉴。
鱼雷; 加速度计零偏; 标定
0 引言
限于目前的技术及工艺水平, 惯性测量组合参数会随时间发生一定的变化, 导致惯性测量组合性能产生一定程度的下降, 进而影响导航系统的使用, 因此需要定期对其进行标定。鱼雷光纤测量组合传统标定方法是对其进行拆卸返厂, 利用高精度转台进行位置标定和速率标定。该方法标定精度高, 但工作量大、成本较高[1-2], 而且不利于鱼雷战备完整性, 因此需要研究鱼雷惯性测量组合现场免拆卸标定方法。
惯性测量组合误差以导航系统误差的形式表现出来, 所以可通过导航系统误差方程, 分析惯性测量组合误差的可观测性, 给出其现场标定方法。Pittman等[3-4]利用双轴环架旋转三位置, 直接从静态导航系统误差方程中估计器件漂移。张红良[5]利用全局可观测性方法对陀螺仪和加速度计常值误差的可观测性进行分析。赵晓伟等[6]根据陀螺漂移和水平加速度计可观测, 设计了一种车载四位置标定方案对其进行估计, 但未实现所有加速度计零偏估计, 其对位置精度也有要求。赵星宇等[7]建立了陀螺仪和加速度计误差模型加入惯性导航解算, 并进行了状态变量可观测性分析, 设定了发射车的路径轨迹, 让每个误差参数均可被激励。另有学者将加速度计标定问题转换为参数优化问题, 提出一种基于自适应遗传算法的加速度计快速标定方法, 但该方法需要进行多位置旋转[8-9]。
鱼雷在现场一般都是放置在雷箱或雷车上, 无高精度转台实现特殊位置转动或机动。利用卡尔曼滤波估计出的惯性测量组合误差一般是在导航坐标系下表示, 需要转换到雷体坐标系下才能进行补偿。张秦南[10]所提对准技术可实现雷体坐标系到导航坐标系转换矩阵的精确补偿。
文中通过分析导航系统误差方程中惯性测量组合误差的可观测性, 结合对准修正技术, 提出一种静基座条件下鱼雷加速度计零偏三位置现场简易标定方法, 以实现鱼雷大修周期内惯性测量组合免拆卸标定。
1 理论分析
导航坐标系选取北天东坐标系, 雷体坐标系选取前上右坐标系, 静基座条件下雷体导航系统误差方程为

利用可观测性相关分析理论[11]对惯导系统误差方程进行分析, 系统状态方程为


系统量测方程为

系统可观测矩阵为


表1 特征值与对应的特征向量组合

2 方案设计







图1 三位置标定方案设计
3 数学模型
利用式(2)、式(4)建立卡尔曼滤波模型, 卡尔曼滤波步骤如下。
状态一步预测
状态一步预测均方误差

滤波增益

状态估计

状态估计均方误差




4 数学仿真分析
每个位置静止300 s, 在每个位置先进行初始对准, 横滚角和俯仰角初始化为零, 姿态矩阵修正后得到的姿态角如表3所示。
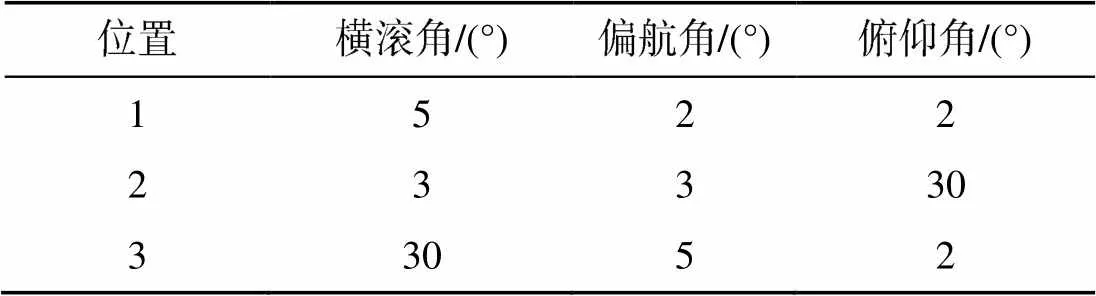
表2 姿态角真实值

表3 姿态角估计值
表3中俯仰角和横滚角的最大绝对误差为0.06°, 由此可知, 鱼雷经过初始对准可以得到精确的俯仰角和横滚角。3个位置的天向加速度计滤波估计曲线见图2, 具体估计值见表4。

图2 天向加速度计零偏估计值

表4 各位置天向加速度计零偏估计值

表5 加速度计零偏估计值
表5中, 加速度计零偏绝对误差最大值为0.09×10–3, 满足低等测量精度惯性测量组合标定的要求。为验证姿态角对加速度计零偏估计精度的影响, 对不同姿态角情况下的标定方法进行仿真。

表6 姿态角设置值
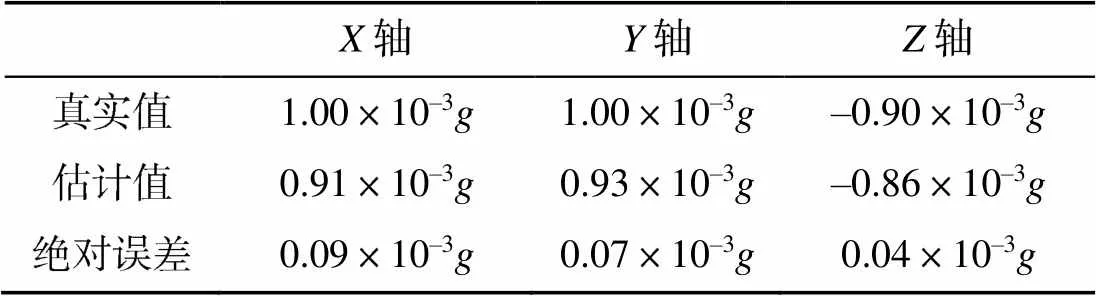
表7 加速计零偏估计值
由表7可知, 不同姿态角最后得到的加速度计估计精度量级是相同的。式(9)中加速度计常值零偏的估计精度取决于姿态角估计精度, 而模型不变, 姿态角估计精度不变。
5 结束语
文中通过对惯性导航系统误差方程中的天向加速度计零偏进行可观测性分析, 设计了一种鱼雷加速度计零偏免拆卸标定方法, 仿真结果表明该方法可对中低等精度惯性测量组合中的加速度计零偏进行有效检测, 与传统标定方法相比无需机动, 且对位置无精度要求, 结合文献[13]所提的陀螺漂移现场标定方法, 可完成鱼雷惯性测量组合主要误差项标定方案设计, 为弹载捷联惯导系统现场免拆卸标定研究提供借鉴。
[1] 曹京宇. 某型导弹发射车的激光陀螺惯导系统外场标定技术研究[D]. 长沙: 国防科学技术大学, 2011.
[2] 杨晓霞, 黄一. 外场标定条件下捷联惯导系统误差状态可观测性分析[J]. 中国惯性技术学报, 2008, 16(6): 657- 664.
Yang Xiao-xia, Huang Yi. Observability Analysis for Error States of SINS Under Outer Field Conditions[J]. Journal of Chinese Inertial Technology, 2008, 16(6): 657- 664.
[3] Pittman D N, Roberts C E. Determining Inertial Errors from Navigation-in-place Data[C]//IEEE PLANS 92 Position Location and Navigation Symposium Record. Monterey. CA, USA: IEEE, 1992: 60-67.
[4] Pittman D N, Lanier N C, LeFever V C. Integration and Testing of a Low-Cost Land Navigator for the Army Combined Arms Weapon System(TACAWS)[C]//Pro- ceeding of Position Location and Navigation Symposium, Atlanta. GA, USA: IEEE, 1992: 399-406.
[5] 张红良. 陆用高精度激光陀螺捷联惯导系统误差参数估计方法研究[D]. 长沙: 国防科学技术大学, 2010.
[6] 赵晓伟, 孙谦, 李宏, 等. 一种车载激光捷联惯组免拆卸标定方法[J]. 导航与控制, 2016(1): 17-22, 6.
Zhao Xiao-wei, Sun Qian, Li Hong, et al. A Free Disassembly Calibration Method for Strapdown Inertial Navigation System Based on the Vehicle[J]. Navigation and Control, 2016(1): 17-22, 6.
[7] 赵星宇, 戚红向, 王世会, 等. 基于参数估计的捷联惯组整弹标定方法研究[J]. 航天控制, 2017, 35(6): 14-18.
Zhao Xing-yu, Qi Hong-xiang, Wang Shi-hui, et al. Research on Calibration of SINS by Kalman Filter[J]. Aerospace Control, 2017, 35(6): 14-18.
[8] 张爽, 张若愚. 基于自适应遗传算法的MEMS加速度计快速标定方法[J]. 北京航天航空大学学报, 2019, 45 (10): 1982-1989.
Zhang Shuang, Zhang Ruo-yu. Rapid Calibration Method of MEMS Accelerometer Based on Adaptive GA[J]. Jour- nal of Beijing University of Aeronautics and Astronautics, 2019, 45(10): 1982-1989.
[9] 杨管金子, 李建辰, 黄海, 等. 基于遗传算法的加速度计免转台标定方法[J]. 中国惯性技术学报, 2017, 25(1): 119-123.
Yang-Guanjinzi, Li Jian-chen, Huang Hai, et al. Non- turntable Calibration Method for Three-Accelerometer Based on Genetic Algorithm[J]. Journal of Chinese Inertial Technology, 2017, 25(1): 119-123.
[10] 张秦南. 快速高精度的二次对准技术研究[J]. 鱼雷技术, 2001, 9(3): 34-36.
[11] 杨晓霞, 阴玉梅. 可观测度的探讨及其在捷联惯导系统可观测性分析中的应用[J]. 中国惯性技术学报, 2012, 20(4): 405-409.
Yang Xiao-xia, Yin Yu-mei. Discussions on Observability and Its Applications in SINS[J]. Journal of Chinese Inertial Technology, 2012, 20(4): 405-409.
[12] 王新龙. 捷联式惯导系统动、静基座初始对准[M]. 西安: 西北工业大学出版社, 2013.
[13] 阮卫, 张秦南, 迪玉茹, 等.一种惯性测量组合陀螺常值漂移外场标定方法[J]. 水下系统无人学报, 2019, 27(4): 442-445.
Ruan Wei, Zhang Qin-nan, Di Yu-ru, et al. An Outer Field Calibration Method of IMU Gyro Constant Drift[J]. Journal of Unmanned Undersea Systems, 2019, 27(4): 442-445.
Method of Field Calibration for Torpedo AccelerometerZero Bias
RUAN Wei, HAO Zhe, SONG Xi-fa, ZHANG Qin-nan, WANG Li-wen, GUO Lin-na
(The 705 Research Institute, China State Shipbuilding Corporation Limited, Xi’an 710077, China)
To solve the problem in which a torpedo inertial measurement unit is required to disassemble for calibration regularly. In this study, a disassembly free calibration method for a torpedo inertial measurement unit is proposed. By using velocity errors as observations to establish the Kalman filtering model on a stationary base, first, the misalignment angle is estimated; second, vertical accelerometer zero bias is estimated, and the attitude matrix of three positions and upward accelerometer zero bias are used to solve the accelerometer bias of the inertial measurement unit. Simulation results show that this method is effective and feasible for torpedo-field disassembly free calibration.
torpedo; accelerometer zero bias; calibration
TJ630; U666.12; V249.3
A
2096-3920(2021)03-0363-05
10.11993/j.issn.2096-3920.2021.03.018
阮卫, 郝喆, 宋喜发, 等. 一种鱼雷加速度计零偏现场标定方法[J]. 水下无人系统学报, 2021, 29(3): 363-367.
2020-06-30;
2020-09-27.
阮 卫(1993-), 男, 硕士, 主要研究方向为水下航行器导航与控制技术.
(责任编辑: 陈 曦)
猜你喜欢
飞控与探测(2021年5期)2022-01-05
导航定位与授时(2021年6期)2021-12-02
汽车电器(2021年8期)2021-08-24
汽车电器(2021年7期)2021-08-04
少儿科技(2021年4期)2021-01-11
汽车维修与保养(2020年11期)2020-06-09
兵器知识(2020年2期)2020-03-20
文萃报·周二版(2019年46期)2019-09-10
智富时代(2019年2期)2019-04-18
智富时代(2019年2期)2019-04-18