海洋温盐深传感器技术自主创新与产业发展的几点思考
2021-07-12 01:00:00李红志闫晨阳贾文娟
水下无人系统学报 2021年3期
李红志, 闫晨阳, 贾文娟
海洋温盐深传感器技术自主创新与产业发展的几点思考
李红志, 闫晨阳, 贾文娟
(国家海洋技术中心, 天津, 300112)
温盐深(CTD)是海洋动力环境要素中最基础的环境信息, 海洋调查首先是对海水的温度、盐度随深度分布及变化的调查。所有的海洋观测监测平台都要集成和应用温盐深传感器, 相关测量仪器已普遍应用于台站, 船舶, 浮标, 潜标, 座底式、拖曳式和水下运动平台等。文中分析了国际上海洋CTD测量传感器的应用需求和技术发展动态, 回顾了我国温盐深传感器技术的发展历程, 深度剖析国内CTD传感器应用的“卡脖子”之痛原因之所在。最后, 针对多年来我国该项技术一直依赖于进口、受制于人的现状, 提出实现该技术自主创新和产业发展的思考建议。文中研究可以为未来国产海洋CTD传感器技术的自主创新和产业发展提供一些建议。
海洋观测; 温盐深传感器; 自主创新; 产业发展
0 引言
海洋动力环境要素中, 海水温度、盐度、深度是最基础的海洋环境信息, 海洋调查首先是进行海水的温度、盐度随深度分布及变化的水文调查, 因此温盐深(conductivity temperature depth, CTD)是海洋调查和监测中最重要的常规观测项目[1]。而在海洋技术中, 传感器作为感知部分, 在海洋监测/探测领域居于核心和关键地位, 因此所有的海洋观测监测平台都要集成和应用CTD传感器, 其测量技术受到普遍重视[2-3]。相关测量仪器已普遍应用于台站, 船舶, 浮标, 潜标, 座底式、拖曳式和水下运动平台等, 如图1所示。目前, 国外在海洋CTD传感器的产业化方面已经相当成熟, 产品性能也居于世界领先地位。在众多国家级项目的支持下, 国内传感器科研样机主要技术指标已基本接近国际先进水平, 但存在着产品化程度不高、产品质量不稳定、环境适应性差等缺陷, 业务应用中对进口传感器的依赖程度达到90%以上。

图1 系列化CTD传感器应用场景示意图
1 国内外CTD传感器技术发展现状
1.1 国外现状
国外对CTD测量技术的研究始于20世纪60年代, 美国、德国和日本等国先后开展了CTD传感器的研制, 研发出各具特色的产品, 并在海洋调查观测中获得了广泛应用。目前, 世界上主要海洋科技强国都拥有自己的CTD知名企业, 包括美国Seabird和RDI, 加拿大AML和RBR、德国Sea & Sun Technology、意大利IDRONAUT、日本ALEC以及英国VALPORT等[4-7]。其中, Seabird公司的CTD传感器产品在精度、可靠性等方面尤为突出, 占据了国内外大多数市场份额。
一般按照船载、水面和水下、机载3类搭载平台对CTD传感器进行系列化分类, 具体如图2所示。
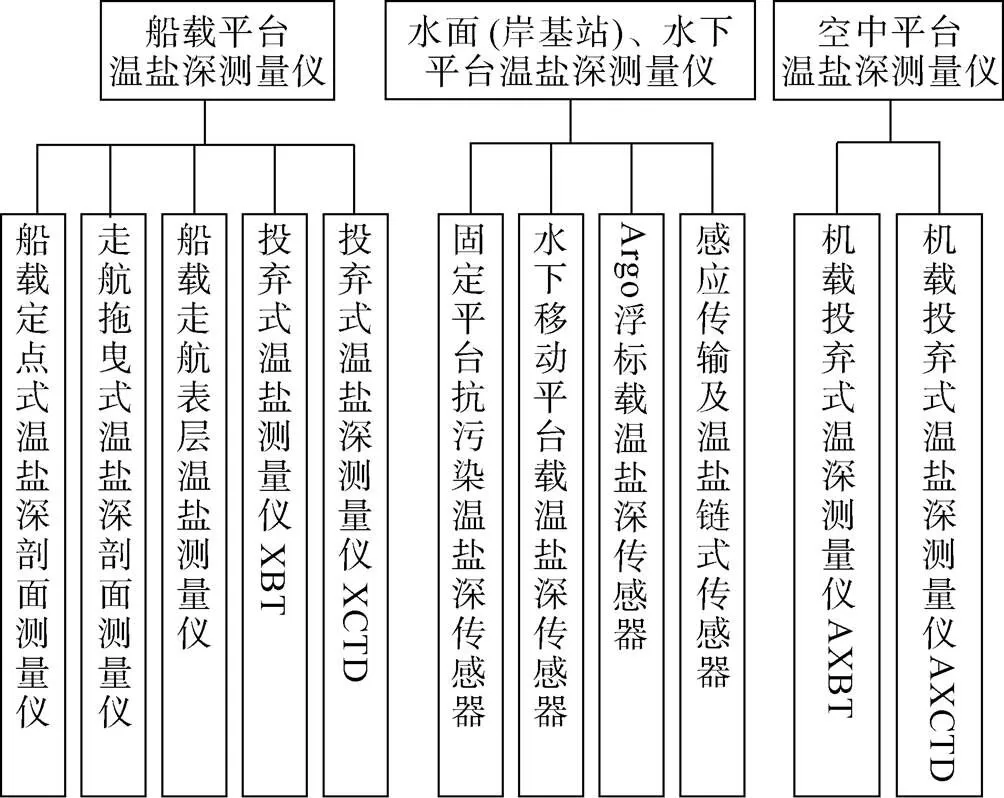
图2 系列化CTD分类示意图
船载平台的CTD传感器是调查船必备的装备, 代表着CTD测量技术的最高水平[8]。其在船舶处于走航或漂泊状态时进行投放和回收, 测定海洋表面至水下一定深度范围内的海水温度、电导率和压力数据。这类CTD传感器的典型特点一般表现为高精度和高采样率, 以对海水温盐随深度变化的规律进行精细刻画。水面和水下固定平台CTD传感器[9]主要应用于海洋台站、浮标、潜标和海底平台等, 突出特点表现为长期稳定性优异, 尤其是在浅表层应用, 具备相应的抗生物附着措施, 满足其在水中长期连续工作的需求。水下移动平台CTD传感器主要应用于潜水器、自主遥控水下机器人(automatic remote vehicle, ARV)、遥控水下航行器(remote operated vehicle, ROV)、无人水下航行器(unmanned undersea vehicle, UUV)、自主水下航行器(automatic undersea vehicle, AUV)、水下滑翔机和Argo浮标等[10-11], 需要尽可能不影响平台的运动特性, 其突出特点为高精度、体积小、低功耗及低流阻等。
1.2 国内现状
国内海洋CTD测量技术始于20世纪70年代, 国家海洋技术中心先后研制了千米和3 000 m自容式CTD自记仪, 并成功参与了我国首次南大洋考察。90年代后期, 随着国际海洋科学研究的兴起, 世界环流试验计划(world ocean circulation experiment, WOCE)对CTD测量技术与设备提出了更为先进的技术指标要求[12]。“九五”开始, 海洋监测技术正式列入了国家科技部“863”计划, 实现了技术跨越性的发展。国家海洋技术中心、山东省科学院海洋仪器研究所、中科院声学所等国内科研机构先后研发了各种新型CTD传感器, 传感器精度、响应时间等技术指标上, 居于国内领先并接近国际先进水平, 大大缩小了与先进国家的技术差距[13-14]。
1.3 国内CTD传感器应用的“卡脖子”之痛
尽管国产CTD传感器技术研究已经取得了长足进步, 与国际先进水平的差距正在缩小,部分指标甚至已达到国际先进水平, 但其产品的批量生产几乎空白, 业务应用方面更是严重依赖于进口, 进口CTD传感器几乎占据了我国海洋调查的“整壁江山”。国家通过各类专项计划在CTD传感器研制方面投入数千万的研发经费, 而真正可得到用户信任的产品却少之又少。据不完全统计, 截至2019年, 中国市场的各类型CTD传感器市场规模约1.5亿元, 其中95%由国外CTD传感器占据, 指标超过7 000 m的高端CTD传感器更是100%由国外垄断。2020年, 世界上最大的CTD传感器生产商——美国Seabird公司对我国用户限制采购, 其产品不得用于“军事最终用途”或“军事最终用户”, 深度1 000 m以上的载人、无人潜水器和水下滑翔机等均被列为禁止使用范围。随后, 几乎所有的国内水下移动平台均无法采购到该公司CTD产品, 短期内又无法获得相应的替代仪器, 严重影响了产品应用, “卡脖子”之痛油然而生[15]。
2 CTD传感器“卡脖子”的原因所在
尽管CTD传感器国内市场有旺盛的需求, 在过去的20年里, 国家通过各类专项计划已取得了多种科研成果[16-17], 但其成果未能实现产业化, 现有国产CTD产品性能落后于国际水平, 绝大部分市场被国外仪器占领。国产海洋仪器生产的模式和能力距离产业化有很大的差距, 生产周期长、效率低、成本高, 产品一致性、可靠性差, 竞争力低, 无法满足市场快速发展, 特别是海洋安全对国产仪器的迫切需求, 这主要由以下几点原因造成。
1) 长期以跟踪仿制国外产品为主, 原始创新能力不足
习总书记指出要“持之以恒加强基础研究”, “基础研究是整个科学体系的源头, 是所有技术问题的总开关”。海洋传感器技术是海洋基础研究的主要组成部分, 但一直以来我国对海洋传感器测量的基础研究不够深入。在CTD传感器技术中, 传感器研究和制造长期以国外技术、产品指标为跟踪目标, 在传感器的测量机理等基础研究方面主要照抄国外, 缺乏系统深入地研究。有些为完成科研项目验收, 片面追求见效快, 特别是在对很多进口传感器的测量原理、敏感探头与电路的参数设计、数据处理方法等方面, 很多是知其然不知其所以然。CTD传感器面临的很多“卡脖子”技术问题, 其根源是基础理论研究跟不上, 源头和底层的东西没有搞清楚, 这些都制约着国产CTD传感器很难达到国外CTD传感器的水平。
2) 传感器关键材料、器件支撑配套能力欠缺
CTD传感器等典型海洋传感器相对于工业传感器而言, 生产批量小、应用范围窄, 而对其稳定性、可靠性要求又特别高, 研制见效周期长。由于前期科研项目支持海洋传感器基本都是对标国外产品进行短平快研究, 小批量的科研样机研制难以创造出上下左右协同的创新生态, 鲜有人或单位愿意沉下心来对海洋传感器的高性能敏感材料、封装材料等进行研究, 从而导致现阶段我国CTD传感器关键材料、器件的配套能力不足, 关键部件配套产品严重依赖进口, 传感器并未实现100%的国产化。例如在CTD传感器的压力测量方面, 高精度压力传感器的压电晶体、万分之一精度石英谐振传感器在国内仍未能实现自主生产, 一旦进口受限, 就会“卡”住我国海洋传感器研制生产的“脖子”。
3) 对传感器探头制作工艺研究不够重视
对国内科研机构和企业来说, CTD传感器结构和电路不难, 难的是传感器部分尤其是敏感探头的制备工艺。目前, 国内传感器的生产工艺与专用工装设备研制相对落后, 微机械加工技术和封装技术不够先进, 监测手段也尚待规范。这些工艺上的不稳定因素造成传感器性能分散、稳定性差。现阶段传感器批量制作, 不是靠工艺保证, 而是靠后期筛选分档, 由此造成生产周期长、成品率低, 成本急剧上升, 企业不敢投资。由于批产工艺的稳定性和可靠性没有得到根本解决, 限制了国产传感器应用领域和产业的发展。
4) 尚未构建国际一流的海洋传感器测试体系
我国海洋传感器研发投入上一直存在“重研究、轻测试”的情况, 这并不符合海洋仪器海试投入大、风险高、实施困难的特点, 因此, 仅靠研发单位自主投入, 难以实现对大批量、多批次的国产传感器进行反复测试验证, 有效评测生产定型状态, 产品的长期稳定性和可靠性难以准确评价和持续改善, 导致始终无法跳出一个怪圈: 由于缺少支撑国产传感器研发、产品化和产品定型的公益性试验平台, 致使国产传感器缺少实战机会, 导致用户在产品应用时对产品质量可靠性信心不足, 而应用不足又无法有效提升质量和可靠性。在水下无人系统中, 以CTD传感器为例, 我国的典型产品如可用于Argo浮标、AUV、UUV、潜水器、ROV、ARV及水下滑翔机等水下无人自主移动平台连续剖面观测的OST4X系列CTD剖面测量仪的技术指标已达到国际先进水平, 如表1所示。但由于缺乏长期、严格的与国际接轨的检定、测试和现场验证体系, 其稳定性和可靠性与国外产品还有相当的差距, 用户信任度不够, 市场竞争长期处于劣势。
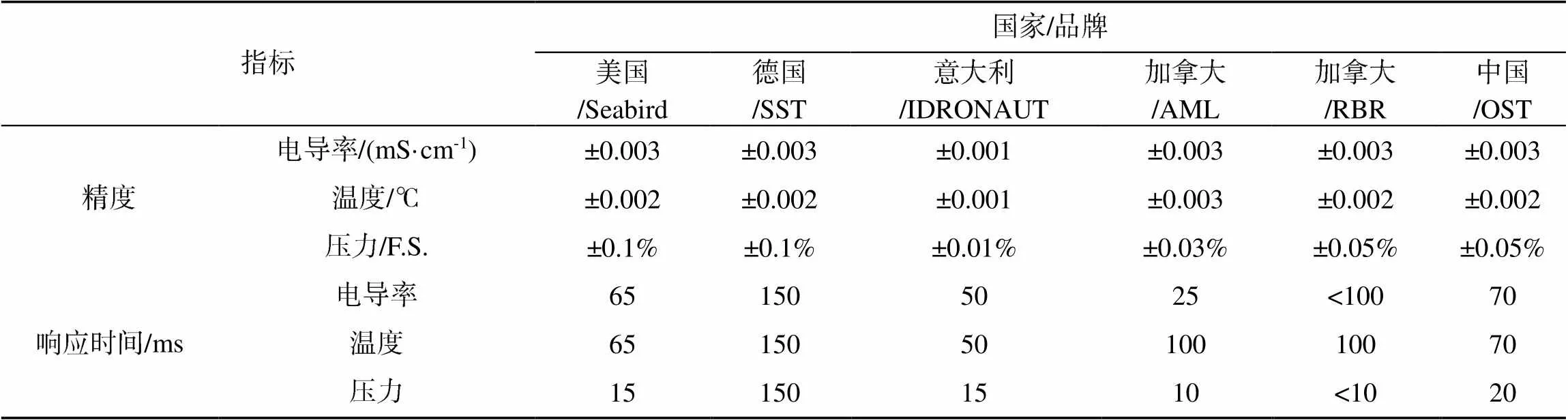
表1 国内外CTD传感器主要技术指标对比情况(数据截止2020年)
5) 未能形成研产用有机结合相互促进的循环机制
海洋传感器技术研究终要走向产品化、产业化才能摆脱对国外的依赖, 真正实现关键核心技术自主可控。但是由于科技体制和成果转化机制的原因, 造成了海洋传感器研、产、用相脱节。早期的海洋传感器研究单位主要集中在大学和研究所, 这些研究单位更关注于科研项目的完成, 做到正样机研制阶段的并不多, 利用自身条件进行批量化生产和应用的更是少之又少, 无法形成批量生产能力, 即使少数进行批量生产后, 其仪器质量、可靠性、稳定性、生产周期和服务等也都无法得到保证。而近年来新兴的海洋传感器小微企业, 因为其得到政府政策、资金、项目的支持有限, 加上前期投资大、市场容量小、收益周期长等特点, 导致其研发能力偏弱, 只能进行机械仿制, 企业生存较为困难。再加上业务单位对国产产品缺乏全面客观的认识, 无法对其性能树立足够信心, 从而形成优先采购进口装备的行业惯性。
3 国产CTD传感器自主创新和产业发展之路
冰冻三尺非一日之寒, 对于长期未解决的CTD传感器“卡脖子”的状况, 需用猛力去破解。
3.1 面向需求, 立足自主创新
一直以来, 在CTD传感器研究方面我国长期以跟踪仿制为主, 鲜有原理、技术、材料和工艺方面的创新。而实际上由于我国在工业制造、微加工、敏感材料等基础领域方面与欧美国家存在的差距, 导致机械地仿制进口传感器方案, 无法获取其高水平的真正精髓之所在, 也致使国内传感器研究的技术水平和产品的性能和可靠性长期落后于先进国家, 在竞争中处于劣势。
未来的海洋监测需要CTD传感器具备用得住、测得准、易集成的特点, 这就对传感器的能耗、体积、长期稳定性、免维护、自校准和平台适应性等方面提出了更高的要求。从这个角度而言, 进口传感器也不是万能的, 其中很多也不适用于国内的实际需求, 尤其是未来海洋监测的需求, 很多“西洋货”在中国的海洋环境中也会“水土不服”。特别是在当今国际复杂局势的大背景下, 更应当紧密围绕我国在海洋经济高质量发展、海洋生态文明建设、海洋科学研究和海洋国防建设等方面的实际需求, 真正立足于自主创新, 树立自立自强的国产传感器品牌, 让进口仪器“走下神坛”。
为了实现这一目标, 未来国产CTD的自主创新主要应集中在以下几个方向:
1) 小型化、低成本、高一致性
对于广袤海洋的观测而言, 现有感知能力还很不足, 其制约瓶颈主要体现在现有海洋传感器体积大、造价高昂、难以广泛布设, 这就使陆地上蓬勃发展的泛在感知物联网无法实现于海洋之上。正因为基于现有技术来连续监测广袤海洋的成本是难以负担的, 美国国防高级研究计划局(Defense Advanced Research Projects Agency, DARPA)于2017年12月宣布启动“海洋物联网” (ocean of things)项目, 试图将海洋感知领入物联网时代。其目标是在一定海域布设数以万计的传感器, 以形成浮动传感器网络。近年来, 国内青岛海洋科学与技术国家实验室的吴立新院士提出了“透明海洋”计划, 其目的也是打造海洋物联网。
实现海洋物联网, 首要突破的关键技术是如何实现多要素传感器微型化、批量制作高一致性、低成本、微功耗, 将海量传感器布放和节点组网变为现实。其最可行的解决途径是采用微机电系统(micro-electro-mechanical system, MEMS)工艺, 集微结构、微传感器、微执行器以及信号处理和控制电路于一体, 对海洋传感器进行革命性创新和应用[18-19]。目前的技术已经可以在一块6 inch 基板上一次成型100余个微型温盐传感器探头, 且一致性很好, 对于中等精度的传感器不需要进行逐个标定, 批量化制作大大降低了成本。这种技术可形成芯片级的海洋无线物联网传感器, 实现海洋哺乳动物、鱼类等动物身体搭载, 记录洄游规律和海水环境要素等信息, 通过海量大数据分析, 得到意想不到的科学发现。
2) 智能化
传统的海洋观测调查采用调查船、台站和浮标等固定平台, 存在观测成本过高, 且无法长期连续观测的难题。海洋无人自主观测手段的兴起有效解决了这一难题, 将海洋观测尺度从大洋环流级推进到中尺度和亚中尺度级, 各种类型的无人自主观测平台进行组网观测, 实现了对海洋环境长期连续、高分辨率、低成本观测, 成为未来海洋观测技术发展的热点[20]。未来该项技术的发展方向是长寿命、智能化, 其搭载的海洋观测传感器也必然要符合这一要求。
智能化CTD传感器的典型特点之一是具备自补偿、自修正功能, 而目前进口传感器尚无法实现这一功能。在水下无人系统中, 以在海洋0~2 000 m范围上下往复做剖面运动的Argo浮标为例, 其寿命要长达3年, 电导率传感器受海洋生物附着等影响, 会产生盐度数据漂移, 如图3所示。全球大洋2 000 m水深的海水盐度基本为一定值, 但从该图中明显看出, 经过多个剖面测量后, 盐度数据已经漂移了近0.3, 严重影响观测数据质量。
图3 Argo浮标电导率传感器污染导致盐度数据漂移
基于CTD传感器的基本测量原理, 开发具备自补偿、自修正功能的智能传感器, 其基本思想是以全球大洋2 000 m深度海水盐度为定值, 如果一个剖面的盐度值较上一个剖面该深度的盐度值产生了较大变化, 即可确定为在此间隔过程中电导率传感器因污染等原因产生了漂移。因为这种漂移主要是电导率传感器探头结构参数上的变化所导致的, 可以在传感器中内置自修正算法, 以未漂移前的盐度值作为基准, 结合传感器漂移后的原始量, 对传感器进行重新标定, 修正传感器定标参数。基于这种方法可以将传感器漂移造成的0.3左右的盐度漂移误差修正到0.01以内, 对于大量无法回收的无人自主观测平台, 可以取得更优的观测数据质量。
海洋传感器的智能化特征还体现在故障自诊断、自修复以及在观测过程中对被观测对象的特征进行智能化判断方面。以水下滑翔机为例, 如图4所示, 未来智能化的观测平台以及传感器, 可以按照特殊的科学研究观测需求, 进行逻辑判断和自适应采样率动态控制, 在温跃层等重点关注区域进行加密测量, 其他区域则降低观测密度, 这样既可以降低功耗, 又可以增加在位时间。智能化传感器与平台电源管理、运动速度和姿态协调相适应, 可以获取更多有效的观测数据质量, 提高观测效能。

图4 水下滑翔机智能化观测示意图
3) 适用于极端环境
当前, 世界各国均加紧拓展深海极地等海洋战略空间, 我国也在由近浅海向深远海迈进。深海、海底、极地等区域的观测网建设对极端环境传感器创新提出了迫切需求。
近期, 我国自主研制的万米载人潜器“奋斗者”号创造了10909 m的深潜世界纪录, 在深渊探测领域进入了国际领先水平[21]。水深11 000 m的深渊具有超高压、低温、资源缺乏、黑暗、板块运动活跃及化学环境独特等特点, 开展深渊科学研究对揭示地球大陆板块运动、生命起源、海啸预警等科学问题具有十分重要的意义。近年来, 对深渊的探索发现备受世界瞩目, 而深渊探索离不开全海深(11000m)探测技术与装备的支撑, 所有全海深调查技术装备都需要通过CTD传感器判断自身所处的状态。深海环境受外界扰动很小, 背景场稳定, 波动度和变化微小, 要测量和有效分辨这些微小的变化, 就要求传感器必须具有高准确度、高分辨率、高稳定性和快速响应的特点。目前我国在自主全海深CTD传感器方面尚处空白, 而现今应用于深渊考察的进口传感器也存在着诸多不足。
作为世界上最主流的CTD传感器制造商美国Seabird公司的产品, 其温度测量分辨率为0.000 2℃, 电导率测量分辨率为0.000 05 s/m, 如图5所示, 该型传感器在4 000 m水深情况下, 已经无法很好地分辨微小的温度和盐度变化。针对此, 我国全海深科学考察所必备的全海深CTD传感器必须立足于自主研发。
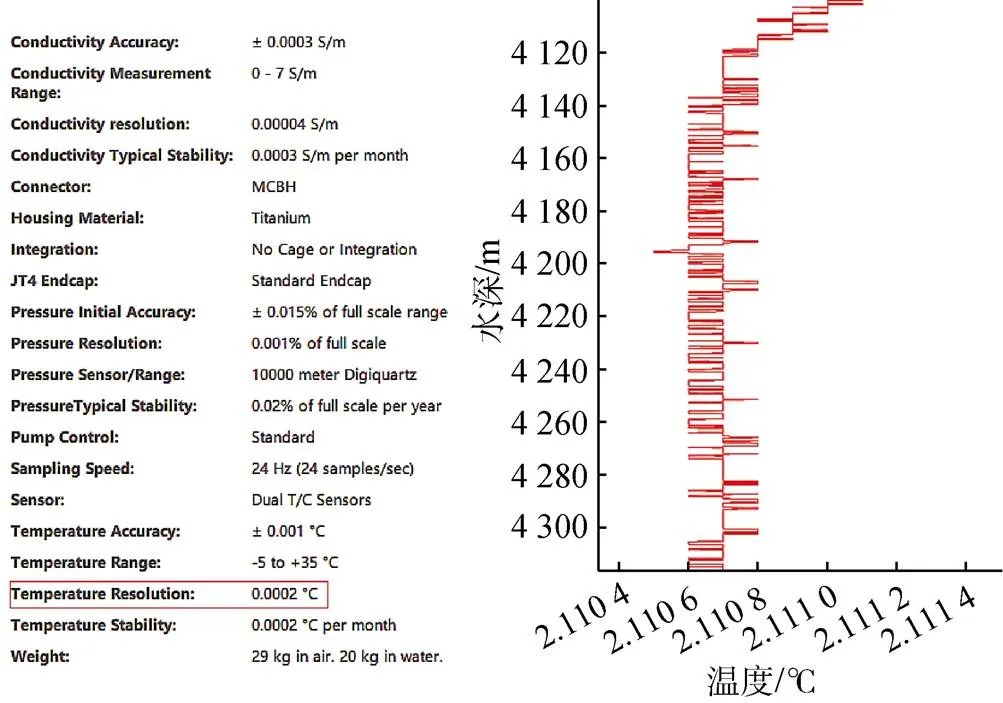
图5 美国Seabird公司 CTD传感器深海4 000 m温度观测数据
3.2 加快构建国际一流水平的海洋传感器测试体系
海洋传感器定标与测试能力是传感器技术发展的重要因素, 制约海洋CTD测量技术发展的高精度校准检定技术已有20年未在国家科技计划中立项, 可谓是一直原地踏步, 究其原因主要是标准溯源理论和实用盐度测量理论方法研究上遇到了瓶颈, 没有突破创新。因此, 首先要加强海洋传感器校准测试的基础理论方法研究, 吸收国际海洋传感器评价体系的先进技术及评价标准,建立高标准的国际一流海洋传感器标定、校准实验环境, 构建国际领先水平的海洋传感器标定、校准和比测评价体系, 大幅度提高海洋传感器的检定校准和评价水平。
海洋传感器需要在不断使用中积累经验, 提高技术水平。国产海洋传感器要走出研制与应用“冰火两重天”的局面, 并向商业化和规模化应用迈进, 需要形成积极使用国产海洋仪器设备的氛围。任何一种新型传感器, 只有在使用中才能发现问题, 并通过不断地改进和提高, 形成高性能、高质量的产品。现阶段所缺乏的国内统一权威性试验测试体系, 制约了传感器自主创新和产业发展, 因此要加快海洋仪器装备海上试验场和定型平台建设, 为国产深海仪器装备提供试验平台、试验背景场和测试方法标准, 对其实海况的工作可靠性、稳定性和环境适应性等性能进行评估与评价, 解决其海上试验高风险、高成本和长周期的问题, 从而促进国产深海仪器装备产品定型和产品化, 助力海洋传感器产业发展。
3.3 政策扶持, 打通研产用链条, 加速产业链循环
分析国产海洋传感器研制与应用“冰火两重天”的原因, 除了研产用存在严重脱节的问题, 更有政策层面上对应用国产仪器设备的漠视。要走出这种困局, 实现海洋传感器自主创新和产业蓬勃发展, 就需要有长期的资金投入以及配套的政策和措施支撑。
党的十九届五中全会通过的十四五规划建议提出“提升企业技术创新能力, 促进各类创新要素向企业集聚, 推进产学研深度融合”。海洋传感器的产业发展要按照国家战略要求, 通过适当的专项投入和政策激励, 引导企业、科研院所和高校建立联合研发中心、工程技术中心和重点实验室等创新平台, 建立以企业为主体、大学-研究所-企业有机结合的海洋传感器产业技术创新体系。面向海洋传感器产业链各个环节对创新资源的需求, 以解决产业链共性、关键技术为重点, 开展产业链上下游协同创新。通过设立一批海洋传感器科技成果孵化器和创投基金, 激发海洋传感器领域创新创业活力。出台相应的政策和措施, 鼓励科研业务单位积极采购和使用国产设备, 将应用国产设备的比例设置为一项重要的考核指标, 并要求根据国产海洋传感器的功能、性能等来科学地设置项目指标, 引导并加强国产海洋传感器的应用。
4 结束语
CTD测量技术为展开海洋科学研究提供最基础的海洋环境信息, 也是支持海洋强国战略发展的重要技术途径。面对长期未解决的国产CTD传感器卡脖子状况, 需要面向需求立足自主创新, 加快构建国际一流水平的海洋传感器环境测试体系, 同时加强政策扶持, 打通研产用链条, 加速产业链循环, 不断提升国产海洋仪器设备的性能和质量, 使国产海洋仪器设备成为真正的“国之利器”。
[1] 李健, 陈荣裕, 王盛安, 等. 国际海洋观测技术发展趋势与中国深海台站建设实践[J]. 热带海洋学报, 2012, 31(2): 123-133.
Li jian, Chen Rong-yu, Wang Sheng-an, et al. Development of International Marine Observation System and Construction of Deep-sea Station in China[J]. Journal of Tropical Oceanography, 2012, 31(2): 123-133.
[2] 李红志, 贾文娟, 任炜, 等. 物理海洋传感器现状及未来发展趋势[J]. 海洋技术学报, 2015, 34(3): 43-47.
Li Hong-zhi, Jia Wen-juan, Ren Wei, et al. Ocean Observation with Physical Oceanographic Sensors: Status and Development Trend[J]. Journal of Oceanology, 2015, 34(3): 43-47.
[3] 张龙, 叶松, 周树道, 等. 海水温盐深剖面测量技术综述[J]. 海洋通报, 2017, 36(5): 481-489.
Zhang Long, Ye Song, Zhou Shu-dao, et al. The Overview of Seawater Temperature and Salt Depth Profile Measurement Technology[J]. Marine Science Bulletin, 2017, 36(5): 481-489.
[4] Piermattei V, Madonia A, Bonamano S, et al. Application of a Low-cost Instrumentation in Arctic Extreme Conditions[C]//Proceedings of the 4th International Electronic Conference on Sensors and Applications. Basel, Switzerland: MDPI, 2017.
[5] Albaladejo C, Soto F, Torres R, et al. A Low-cost Sensor Buoy System for Monitoring Shallow Marine Environments[J]. Sensors, 2012, 12(7): 9613-9634.
[6] Oka E. Long-term Sensor Drift Found in Recovered Argo Profiling Floats[J]. Journal of Oceanography, 2005, 61(4): 775-781.
[7] Attivissimo F, Carducci C G C, Lanzolla A M L, et al. A Portable Optical Sensor for Sea Quality Monitoring[J]. IEEE Sensors Journal, 2014, 15(1): 146-153.
[8] Roemmich D, Boehme L. Integrating the Ocean Observing System: Mobile Platforms[M]//Proceedings of OceanObs’09: Sustained Ocean Observations and Information for Society 2009. The Netherlands: European Space Agency, 2009: 377-394.
[9] Rudnick D L, Cole S T. On Sampling the Ocean Using Underwater Gliders[J]. Journal of Geophysical Research: Oceans, 2011, 116(C8): 006849.
[10] 钱洪宝, 卢晓亭. 我国水下滑翔机技术发展建议与思考[J]. 水下无人系统学报, 2019, 27(5): 474-479.
Qian Hong-bao, Lu Xiao-ting. Suggestions and Thoughts on the Development of Underwater Glider Technology in China[J]. Journal of Underwater Unmanned Systems, 2019, 27(5): 474-479.
[11] 韦圣龙, 李静康, 李云, 等. 基于无人自主航行器的智能水下多参数移动监测平台[J]. 科技与创新, 2020(22): 76-77.
Wei Sheng-long, Li Jing-kang, Li Yun, et al. Intelligent Underwater Multi-parameter Mobile Monitoring Platform based on Unmanned Autonomous Vehicle[J]. Science and Technology and Innovation, 2020(22): 76-77.
[12] 陈连增, 雷波. 中国海洋科学技术发展70年[J]. 海洋学报, 2019, 41(10): 3-22.
Chen lian-zeng, Lei bo. 70 Years of Marine Science and Technology Development in China[J]. Acta Oceanographica Sinica, 2019, 41(10): 3-22.
[13] 王辉, 万莉颖, 秦英豪, 等. 中国全球业务化海洋学预报系统的发展和应用[J]. 地球科学进展, 2016, 31(10): 1090-1104.
Wang Hui, Wan Li-ying, Qin Ying-hao, et al. Development and Application of China’s Global Operational Oceanographic Forecasting System[J]. Advances in Geosciences, 2016, 31(10): 1090-1104.
[14] Fox-Kemper B, Adcroft A, Böning C W, et al. Challenges and Prospects in Ocean Circulation Models[J]. Frontiers in Marine Science, 2019, 6: 65.
[15] 刘应本, 冯梁. 中国特色海洋强国理论与实践研究[M]. 南京: 南京大学出版社, 2017.
[16] 兰卉. 七电极电导率传感器及CTD测量系统技术研究[D]. 天津: 天津大学, 2012.
[17] 李建国. 开放式四电极电导率传感器的研制与实验[J]. 海洋技术, 2005, 24(3): 5-9, 21.
Li Jian-guo. Open Four Electrode Conductivity Sensor Research and Experiment[J]. Journal of Marine Technology, 2005, 24(3): 5-9, 21.
[18] Aravamudhan S, Bhat S, Bethala B, et al. MEMS Based Conductivity-temperature-depth(CTD) Sensor for Harsh Oceanic Environment[C]//Proceedings of Oceans 2005 MTS/IEEE. Washington DC, USA: IEEE, 2005.
[19] 董叶梓, 张鹏, 张锁平. MEMS传感器技术及其在海洋观测中的应用[J]. 信息技术, 2013, 37(4):141-144.
Dong Ye-zi, Zhang Peng, Zhang Suo-ping. MEMS Sensor Technology and Its Application in Ocean Observation[J]. Information Technology, 2013, 37(4): 141-144.
[20] 侯睿, 程宇婷, 李晖, 等. 海洋多平台多传感器协同监测任务智能规划技术[J]. 海洋信息, 2020, 35(3): 11-19.
Hou Rui, Cheng Yu-ting, Li Hui, et al. MarineMulti-platform Multi-sensor Collaborative Monitoring Task and Intelligent Planning[J]. Marine Information, 2020, 35(3): 11-19.
[21] 吴月辉. 下潜深度见证创新高度[N]. 人民日报, 2020- 11-18(7).
Some Thoughts on Independent Innovation and Industrial Development of Ocean CTD Sensor Technology
LI Hong-zhi, YAN Chen-yang, JIA Wen-juan
(National Ocean Technology Center, Tianjin 300112, China)
Temperature, salinity, and depth are the most basic ocean dynamic environmental factors, among others. An ocean survey is a survey of the temperature and salinity of seawater, as well as its distribution and change in depth. All ocean observation and monitoring platforms must integrate and use conductivity temperature depth(CTD) sensors, which have been widely used in stations, ships, buoys, submersible beacons, base types, towed types, and underwater motion platforms. This paper analyzes the global application demand and technology development trend of ocean CTD measurement sensors, and reviews the development of CTD sensors technology in China. The reasons for the “neck sticking” pain in the application of CTD sensors in China are analyzed, and finally, aiming at the situation that China has been dependent on imports and subjugation for many years, some suggestions for achieving independent innovation and industrial development of this technology are proposed in this paper. The findings may point in the right direction for future independent innovation and industrial development of ocean CTD sensor technology.
ocean observation; conductivity temperature depth(CTD) sensor; independent innovation; industrial development
P715.5; TH766
R
2096-3920(2021)03-0249-08
10.11993/j.issn.2096-3920.2021.03.001
李红志, 闫晨阳, 贾文娟. 海洋温盐深传感器技术自主创新与产业发展的几点思考[J]. 水下无人系统学报, 2021, 29(3): 249-256.
2020-12-07;
2021-01-08.
国家重点研发计划项目(2016YFC1400401); 国家重点研发计划重点专项项目(2017YFC1403403, 2017YFC1403304, 2016YFC1400502).
李红志(1975-), 男, 硕士, 正高级工程师, 主要研究方向为海洋温盐深传感器.
(责任编辑: 许 妍)
猜你喜欢
军事文摘(2023年18期)2023-11-03 09:45:42
纺织科学研究(2021年1期)2021-12-03 15:04:42
电子制作(2019年22期)2020-01-14 03:16:52
传媒评论(2019年5期)2019-08-30 03:50:18
时代英语·高一(2019年1期)2019-03-13 10:29:48
当代音乐(2018年4期)2018-05-14 06:47:13
琴童(2017年7期)2017-07-31 18:33:48
小学科学(2017年5期)2017-05-26 18:25:53
测绘科学与工程(2017年1期)2017-05-04 03:40:44
太空探索(2016年7期)2016-07-10 12:10:15