柔性穿戴式上肢康复机器人关节运动控制研究
2021-07-09 08:44翟宇毅马新愿陈冬冬雷静桃
华南理工大学学报(自然科学版) 2021年6期
翟宇毅 马新愿 陈冬冬 雷静桃
(上海大学 机电工程与自动化学院,上海 200444)
医学理论和临床医学表明,对于肢体部分损伤的患者,除了在损伤初期接受必要的手术治疗和药物治疗外,在中后期还需要进行科学的康复训练,这对于肢体运动功能的恢复和提高具有良好的促进作用[1]。肢体功能障碍的恢复过程比较缓慢,需要科学严谨的康复训练才能使运动功能恢复。患者出院后,仍需要进行高效的家庭康复训练[2]。
康复机器人作为一种穿戴在人体外部的智能机电装备,具有提高人类肢体强度、辅助力量增强、提供医疗康复训练等功能[3],将其应用于运动障碍患者的康复治疗,可以替代或协助治疗师,简化传统“一对一”的繁重的康复治疗过程。柔性穿戴式康复机器人具有轻便易穿戴的优点,能够达到更好的康复效果。
柔顺性、稳定性是对康复机器人的基本要求。相比于电机驱动方式,气动人工肌肉驱动方式具有高功率/重量比、高顺应性等优越性能,可以满足康复机器人运动柔顺性的要求;国内外学者采用这种驱动方式研发了一些康复机器人系统。文献[4]开发的RUPERT外骨骼机器人,由McKibben型气动肌肉驱动,可以帮助患者和治疗师进行系统康复治疗;但由于刚性连杆与不同穿戴者的体征兼容性低,运动过程中外骨骼与人体难免会发生相对位移,产生运动干涉。文献[5]开发了一种类似机器人的可穿戴式服装,是外骨骼机器人的一种创新设计方案,它没有金属框架,通过弹性布料穿戴在人体上,使用McKibben气动肌肉为患者提供支撑和助力;该外骨骼机器人运动范围有限,穿、脱比较困难,关节上的重负荷是该穿戴式机器人尚待解决的问题。文献[6]开发了气动肌肉驱动的穿戴式上肢康复机器人,有4个自由度,大部分零件采用铝合金,在医疗机构或居家环境中可以实现基本的康复训练;但该机器人存在体积大、穿戴不便、关节对不齐等不足。
气动人工肌肉致动器提高了系统的运动柔顺性,采用柔软、轻质的结构材料以及高兼容性、仿生性的结构设计改善了传统刚性结构关节不易对齐以及易发生运动干涉的问题,同时也引入了系统非线性和时变性,对外骨骼康复系统的控制稳定性和准确性提出了更高的要求。
文献[7]针对气动人工肌肉驱动的2自由度康复机器人,提出了一种自适应自组织模糊滑模控制方法,并通过实验验证了该控制策略具有较好的控制性能。文献[8]基于上肢康复外骨骼机器人提出了一种模糊滑模导纳控制策略,基本实现了训练过程中的人机协调控制。文献[9]提出了一种新的增强型自适应模糊滑模控制方法,将模糊控制与滑模控制结合,并通过自适应律更改模糊规则的参数来改善系统的跟踪性能。文献[10- 11]研制了基于模糊PI控制的穿戴式上肢康复机器人,采用模糊PI控制器对机器人实施位置控制。相较于上述滑模控制方法,PI控制更加简单易操作,但是滑模控制本质上不连续的开关特性会引起系统的抖振,从而影响系统控制的稳定性和准确性。此外,还有许多基于计算机软件算法的控制方法,如Ahn等[12]将学习矢量量化神经网络用于气动人工肌肉的控制;Jiang等[13]开发了基于气动人工肌肉的康复机械臂的模糊/神经控制;Song等[14]研究了气动人工肌肉建模与控制的混合神经方法。这些控制算法的局限性在于准确性较低,算法过于复杂,无法在实际中应用。因此,许多研究者将传统的鲁棒控制方法与计算机算法相结合,如Fan等[15]开发的基于气动人工肌肉位置跟踪的混合神经调谐PID控制器;Sabzehmeidani等[16]研发的气动人工肌肉致动的混合模糊鲁棒控制器;文献[17]提出了一种应用于高度非线性的串行气动人工肌肉机器人的自适应神经网络柔性力/位置控制算法,以提高其控制力的柔顺性以及位置输出的准确性。
本研究基于轻量化、柔顺性、易穿戴和人体工学等原则,设计了气动人工肌肉驱动的柔性穿戴式上肢康复机器人,该机器人由肩部组件、上臂组件、腕部组件、背板、鲍登线及固定预紧构件组成,具有运动柔顺性高、人机兼容性良好、轻便易穿戴等特点。针对该系统运动柔顺性、控制稳定性与安全性的要求,采用基于模糊PID最优参数的RBF-PID控制器,搭建基于Matlab的半物理实验系统,开展柔性穿戴式上肢康复机器人肘关节康复运动的实验研究,验证控制方法的有效性。
1 柔性穿戴式上肢康复机器人
1.1 机器人结构设计
人体上肢生理结构如图 1 所示,主要由肱骨、桡骨、尺骨、肱二头肌和肱三头肌组成。肘关节是肱尺关节、肱桡关节和桡尺近侧关节三部分被包在囊腔内而形成的一个复合运动关节,其中肱尺关节与肱桡关节组成的滑车关节让肘关节可以进行屈伸运动,由桡尺近侧关节组成的车轴关节让肘关节可以进行旋前与旋后运动[18- 19]。肱骨两侧肌肉和前臂肌肉群协调收缩/伸展,牵引前臂实现肘部运动。
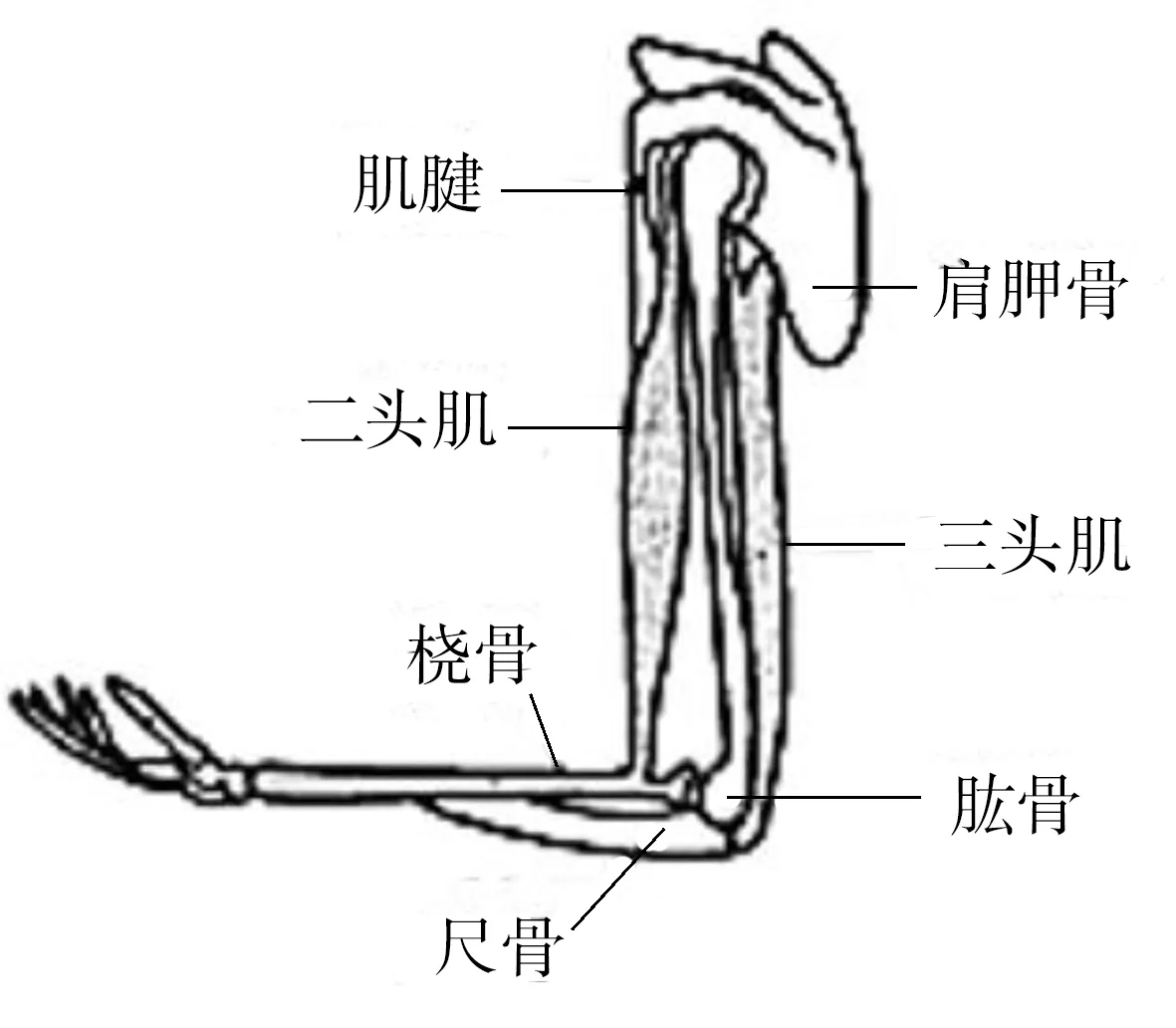
图1 人体上肢生理结构图
根据人体上肢生理结构,设计可穿戴式柔性上肢康复机器人,如图2所示。
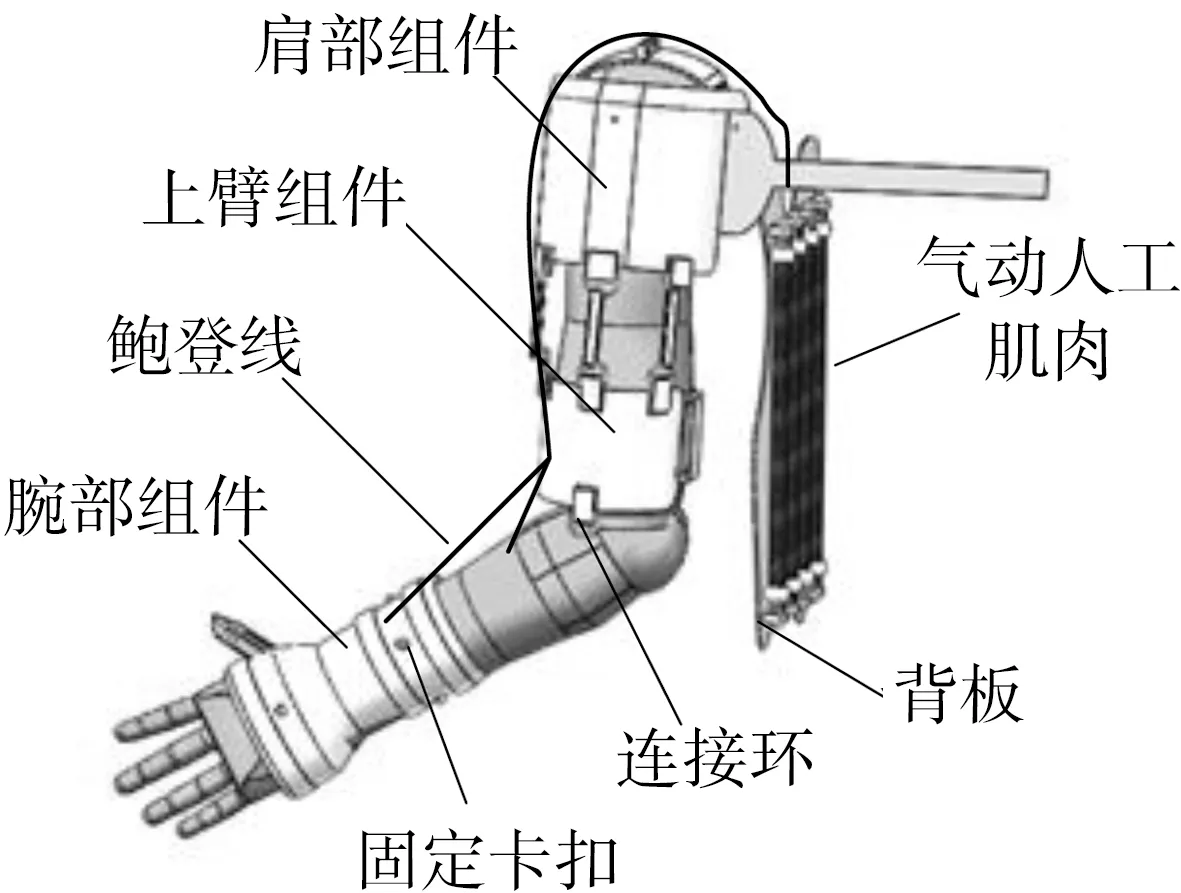
图2 柔性上肢穿戴式康复机器人模型
该柔性穿戴式机器人以弹性纤维布料作为结构本体,固定连接处采用刚性固定构件,针对上肢运动障碍的患者,机器人设计有肘关节屈/伸、前臂旋前/旋后、腕关节屈/伸3个自由度。在肩部和上臂组件都有鲍登线的引导固定构件,前臂两侧和手掌前后有牵引固定点,各部分穿戴在人体相应位置,采用魔术贴固定以便于穿戴。气动肌肉安装在背部,由气动人工肌肉的收缩/伸展牵引前臂,模拟人体上肢运动。传统的牵引式多自由度外骨骼机器人大多通过末端手柄带动整个上肢运动,康复运动不能精确到各个关节,而患者需要的康复运动因人而异,康复训练也因人因关节而制定。该柔性上肢穿戴式康复机器人将各个关节的康复运动分开,鲍登线分别连接气动肌肉移动端和机器人各组件,气动肌肉的驱动力通过鲍登线传递,牵引机器人实现各个关节的康复运动,使得人机运动高度统一。文中从结构材料、穿戴方式等方面对柔性穿戴式机器人与刚性上肢外骨骼机器人进行对比分析,结果如表1所示。
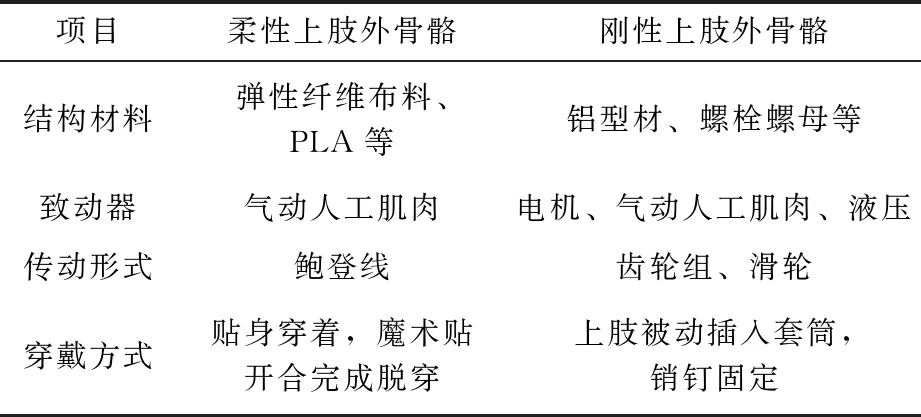
表1 柔性/刚性外骨骼系统对比
与传统刚性外骨骼机器人相比,文中设计的柔性穿戴式上肢外骨骼,本体采用弹性布料和PLA材料,可贴身穿着,魔术贴设计更方便穿脱,气动人工肌肉加鲍登线的驱动组合具有较高的功率质量比,使得系统具有轻便易穿戴的优点。
1.2 气动肌肉驱动方式
根据人体上肢关节运动机理,采用气动肌肉为关节提供驱动力矩。传统的气动肌肉拮抗驱动方式通过定滑轮连接气动人工肌肉和运动关节,滑轮中心轴与关节转动轴重合,通过气动人工肌肉的收缩带动滑轮转动,从而驱动关节运动,如图3(a);该形式的仿生关节,定滑轮既要与鲍登线连接又要与负载固连,结构不紧凑,而且只有绕定滑轮轴线转动的一个自由度,运动形式单一,不适用于更高要求的工作环境。为了更好地复现肘关节运动特点,采用气动人工肌肉类拮抗驱动方式,如图3(b)所示。
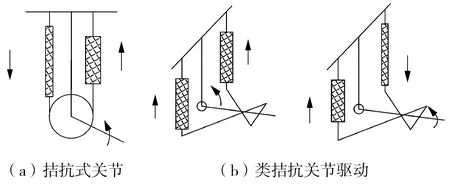
图3 气动肌肉驱动方式
将人体上臂与前臂简化为两连杆,连杆连接处简化为复合关节,模拟肱尺关节与肱桡关节组成的滑车关节使肘关节可以进行屈伸运动,桡尺近侧关节组成的车轴关节使肘关节可以进行旋前与旋后运动。鲍登线通过前臂固定座与固定卡扣交叉连接,形成类拮抗驱动方式,即肌肉并联运动时驱动肘部屈/伸运动,肌肉拮抗运动时驱动前臂旋前/旋后运动。
2 关节动力学建模
柔性上肢穿戴式康复机器人具有人机兼容性,运动过程中可将人体上肢-机器人组成的人机系统运动简化为人体上肢的运动,因此建立人体上肢动力学模型即该机器人的动力学模型。以肘部屈/伸运动为例,建立动力学模型。
2.1 气动肌肉数学模型
由于气动人工肌肉具有非线性、迟滞性的特点,难以建立气动肌肉的精确力学模型。文献[20]建立的气动肌肉静态力学模型,考虑了恒压条件下气动肌肉出力/位移的非线性,本研究采用该模型,建立上肢穿戴式康复机器人关节动力学模型。
气动人工肌肉的静态力学模型为
F(ε,p)=k1(p)-k2(p)ε+k3(p)exp(-με)
(1)

2.2 肘关节屈/伸动力学建模
肱尺关节与肱桡关节组成的滑车关节保证肘关节能够进行屈/伸运动,将人体上肢的滑车关节简化为转动副,上臂和前臂分别简化为连杆,且假设上臂固定,肘关节屈/伸运动的简化模型如图4所示。
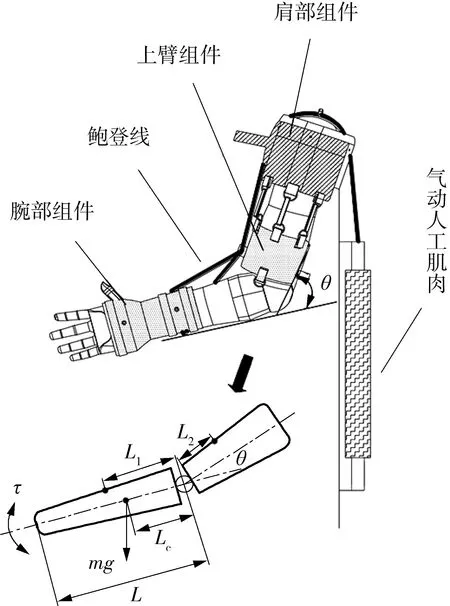
图4 肘关节屈/伸运动简化模型
肘部屈/伸运动由气动人工肌肉并行驱动鲍登线拉伸前臂实现,由拉格朗日法推导其动力学模型,上肢运动时的动能K和势能P为
(2)
P=mcgL1sinθ
(3)
将系统动能和势能代入拉格朗日方程,并引入肘部运动的阻尼力,肘部屈/伸运动的动力学模型为

(4)
气动人工肌肉并联收缩产生的驱动力矩为
(5)
式中,F为气动肌肉的驱动力,α为牵引鲍登线与前臂轴线夹角。
有关参数可根据文献[21- 22]计算或调整:前臂质量为人体总质量M的2.2%,即m=0.022M,由于本研究将前臂和手掌视为整体,取mc=0.03M;前臂质心至肘关节中心的距离为前臂总长度的68.2%,本研究考虑到手掌质量,故取前臂手掌合成质心到肘关节中心的距离为手掌前臂总长度的68%,即Lc=0.68L。
3 基于模糊控制器的RBF-PID控制器设计
考虑到家庭康复训练和简单生活助理的不同需求,控制器的设计既要保证康复运动的准确性、稳定性与安全性,又要保证各个辅助动作能够以简单的方式快速实现,本研究设计了基于模糊控制器的RBF-PID控制器。
3.1 RBF神经网络PID控制器设计
径向基函数(Radial Basis Function,RBF)网络是一种3层前向网络,网络结构如图5所示。
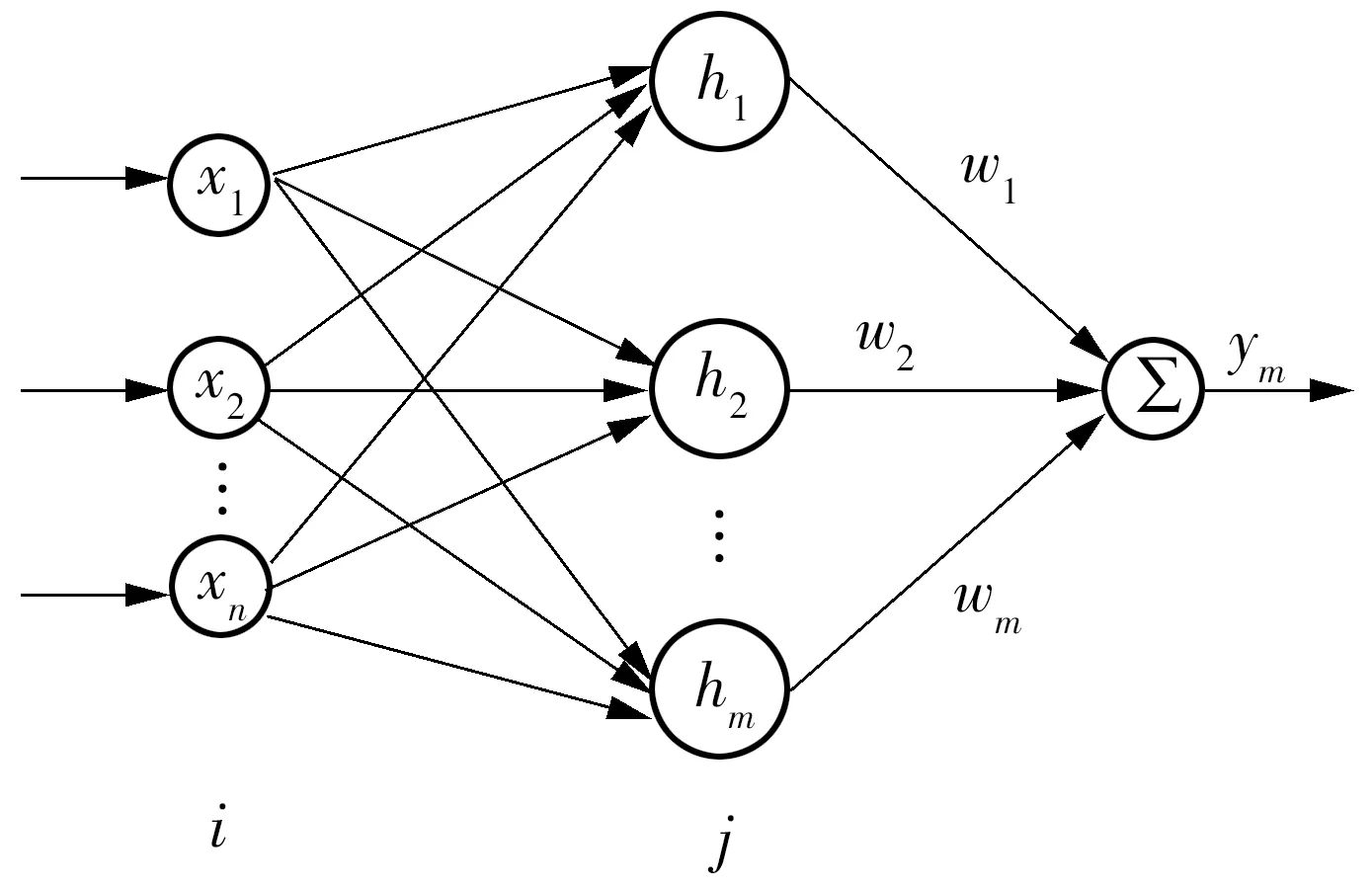
图5 RBF神经网络结构
RBF神经网络由输入到输出的映射是非线性的,隐含层空间到输出空间的映射是线性的,是一种局部逼近的神经网络,能够以任意的精度逼近任意非线性函数,因而可以提高学习速度并避免局部极小问题。采用RBF神经网络控制算法实现PID参数自适应调整,可有效提高系统的精度、鲁棒性和自适应性。
图5中,x=[x1x2…xn]T为网络输入,w为网络的权值,hj为隐含层第j个神经元的输出,选用高斯函数,即
(6)
式中:j=1,2,…,m;cj=[cj1cj2…cjn]为第j个隐含层神经元的中心点向量值;‖*‖为欧几里得范数。
隐含层节点结构需要通过样本离线训练获得,采用梯度下降法修正隐含层相关参数。为避免训练过程中发生系统振荡,需要同时考虑t时刻误差梯度下降方向和t时刻之前的误差梯度,故此在隐含层结构参数修正算法中引入动量项。设在k时刻系统的理论输出为y(k),RBF网络输出为ym(k),网络逼近的性能指标为
(7)
根据梯度下降法,对网络中心节点、节点基宽参数以及输出权值进行迭代计算。
RBF-PID自适应控制结构可以通过RBF网络获取被控对象的Jacobian信息,即控制系统的输出对控制输入的灵敏度信息,进而调节PID参数。
增量式PID控制器的控制误差为
e(k)=rin(k)-yout(k)
(8)
PID控制器三相输入为
(9)
控制算法为
Δu(k)=kPxc(1)+kIxc(2)+kDxc(3)
(10)
u(k)=u(k-1)+Δu(k)
(11)
神经网络性能指标函数为:
(12)
通过梯度下降法调整控制参数kP0,kI0,kD0:
雅克比矩阵算法为
(13)
3.2 基于模糊PID最优参数的RBF-PID控制器设计
在实际控制过程中,RBF神经网络结构参数确定后,PID控制器初始参数kP0、kI0、kD0的取值合理与否直接影响控制效果,选取不当易造成系统超调量过大、响应速度过慢和波动。而PID初始参数的选取大都依赖操作人员的控制经验和专业知识。因此,为保证控制器初始参数kP0、kI0、kD0的取值合理,实现最优控制效果,建立包含实际控制经验的模糊PID控制器。

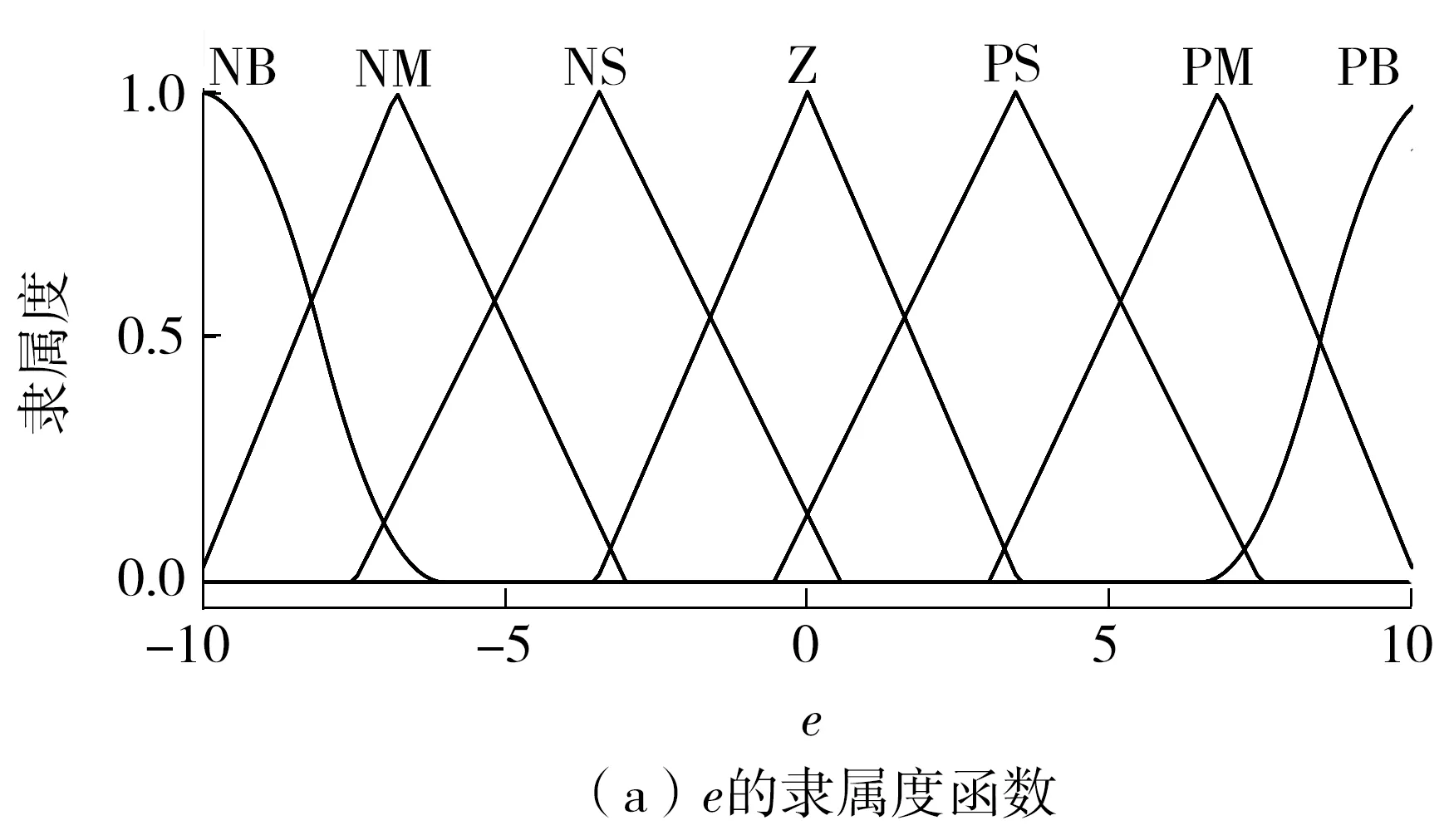
图6 模糊推理输入/输出隶属度函数
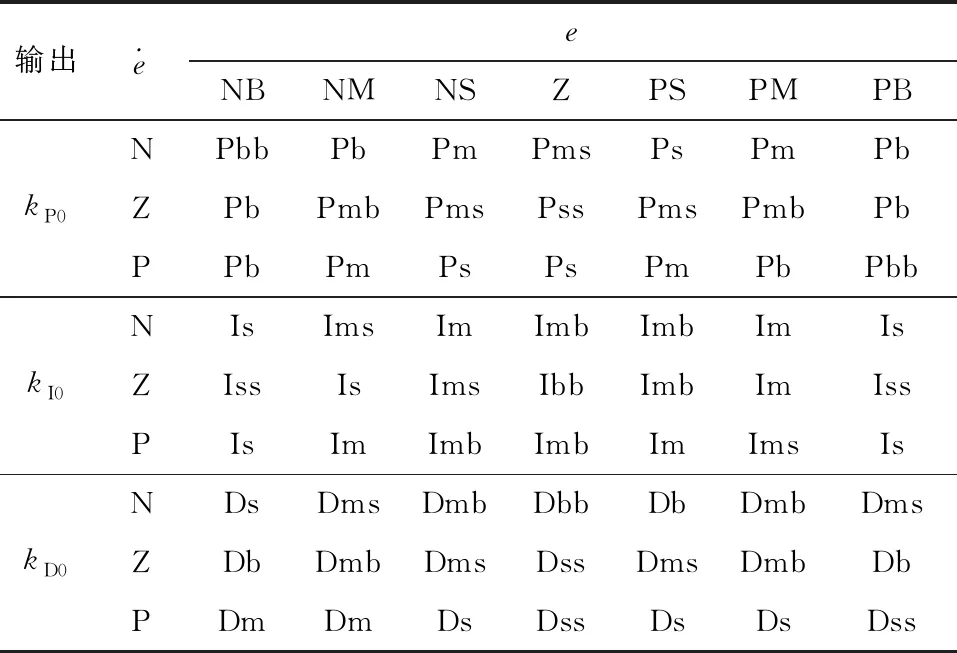
表2 模糊控制规则
基于模糊PID最优参数的RBF-PID自适应控制结构如图7所示。
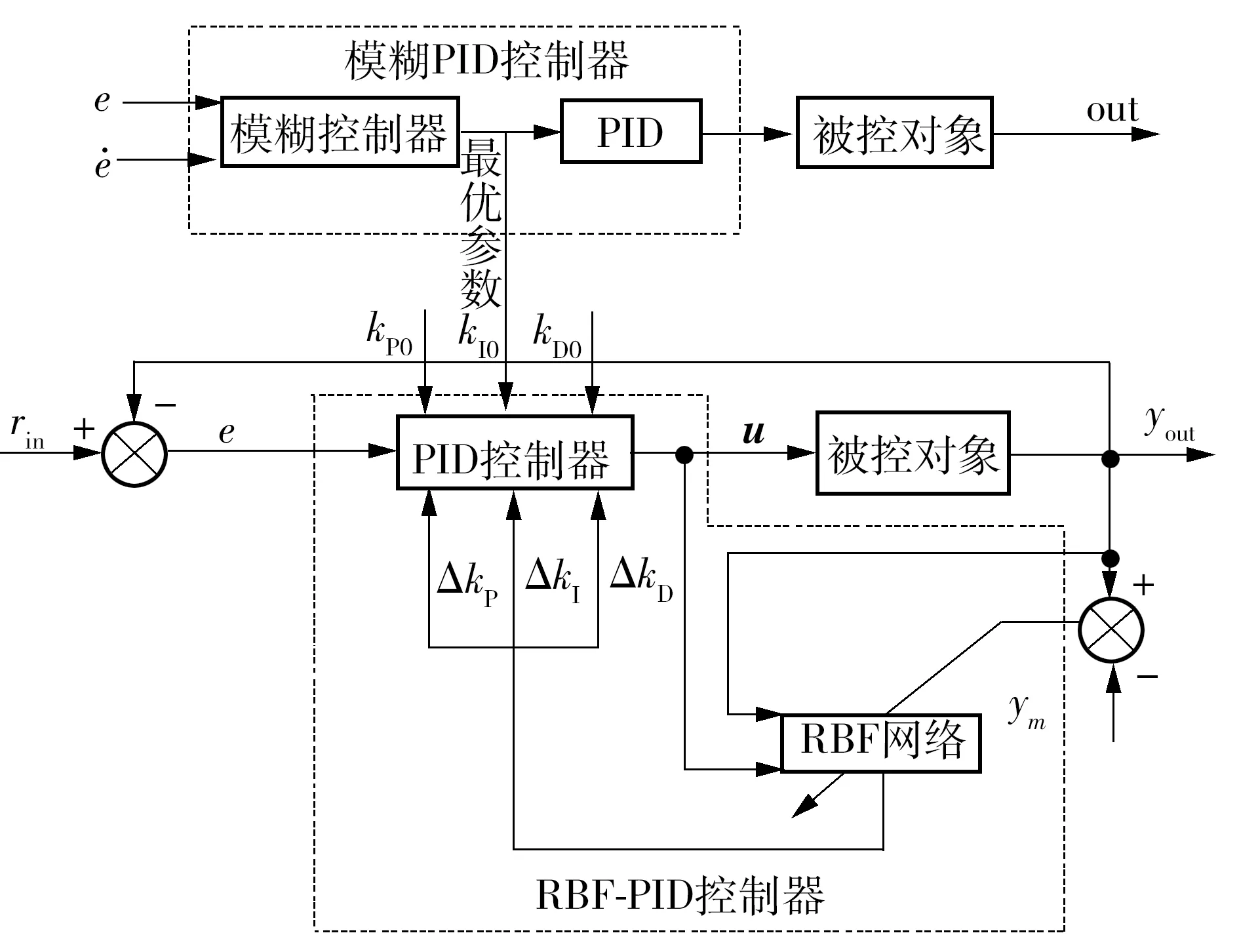
图7 基于模糊PID最优参数的RBF-PID自适应控制
利用以上模糊PID控制器控制肘关节的康复运动,实现较为理想的控制效果后,此时模糊控制器输出的参数kP0、kI0、kD0即为最优参数。将该组参数作为初始参数kP0、kI0、kD0代入RBF-PID控制器中,避免了人工试凑取值,可以更快地实现理想的控制效果。
4 仿真分析
以穿戴式康复机器人的肘关节屈/伸运动为例,利用Matlab软件编写S函数,通过Simulink环境搭建仿真框图进行仿真研究分析。
传统PID控制算法需要根据经验不断试凑寻找合适的控制参数,很难达到理想的控制效果。为此,本研究设计了包含实际控制经验的模糊PID控制器,以确定kP0、kI0、kD0的合适初值,各项系数调整后的结果如图8所示。将调整后的最优参数代入传统PID控制器、RBF-PID自适应控制器中进行位置追踪对比仿真实验,以验证控制算法的性能。为保证安全性,该机器人肘部有效康复运动范围选定0~45°,RBF神经网络的结构选为3- 6- 1,学习速率为0.3,动量因子取0.01。规划曲线作为系统输入信号,在3 s时加入阶跃信号作为干扰项,肘关节角位移跟踪仿真结果,如图9所示。
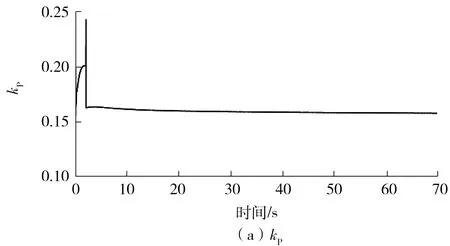
图8 模糊PID系数调整后的结果
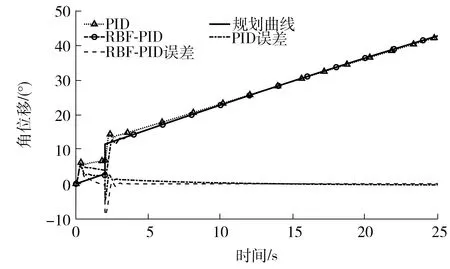
图9 肘部康复运动位置追踪仿真结果
由图9可以看出,传统的PID控制方法在确定各环节时间常数后还是无法实现稳定准确的轨迹追踪,而RBF-PID控制算法在自适应调整的基础上,追踪效果明显改善;在模糊-PID控制算法确定的合适初值的基础上,RBF-PID控制算法更快地完成训练,达到理想的控制效果;在加入干扰之前的3 s内,各个算法都表现出一定的超调现象(导致该现象的部分原因是气动肌肉模型存在滞后特性,当气压足以使其收缩时发生瞬时的收缩动作,从而表现出超调现象),而RBF-PID算法的超调量较小,说明该算法更具控制稳定性,受气动肌肉滞后特性的影响较小。此外,当加入干扰后,RBF-PID算法响应速度较快,1 s左右追踪到规划曲线,后续基本保持平稳。
5 实验验证
5.1 实验平台
为了验证控制算法对于气动人工肌肉驱动的柔性穿戴式上肢康复机器人的有效性,基于柔性上肢外骨骼系统和Matlab/Simulink半物理实时控制平台,进行肘关节康复运动控制实验。
实验系统如图10所示,为保证实验的安全性,在假人模型上进行实验,将柔性外骨骼穿戴在假人左臂。实验元件包括空压机、Festo公司的DMSP-10型气动人工肌肉、SMC公司的ITV0050型电气比例阀、SENTOP公司WDH22L型非接触式角度传感器、NI多功能数据采集卡、24 V电源及PC机。实验过程中,计算机控制系统中设置有停止和放气的操作按钮,保证整个操作过程的安全。
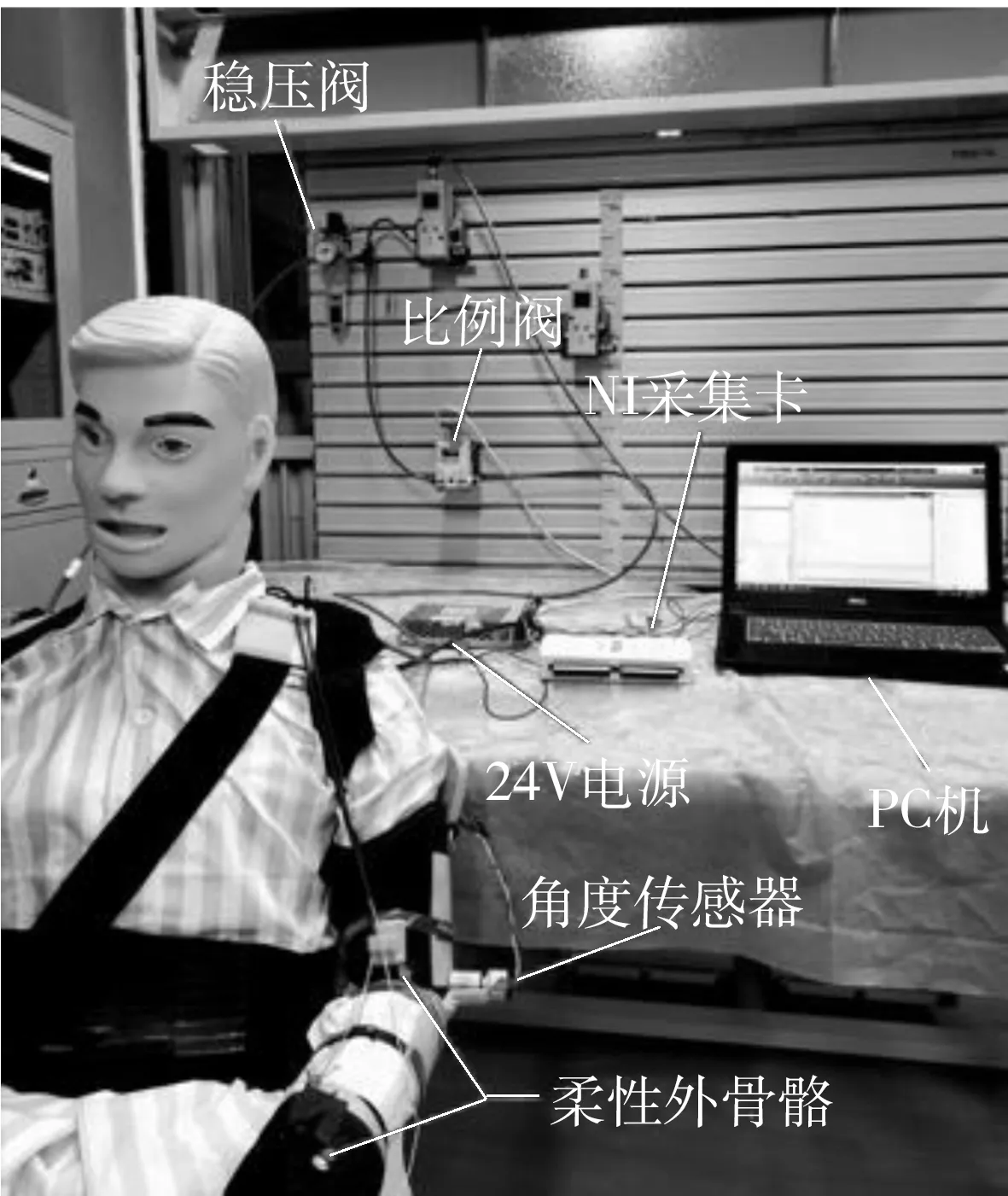
图10 实验系统
5.2 实验结果分析
实验采用规划位置曲线作为信号输入,前0.05 s进行状态保持运动,0.05 s之后开始康复运动,以此检验控制算法的鲁棒性。PID控制器与RBF-PID控制器均采用模糊PID算法得到的初始参数kP0、kI0、kD0。
肘关节运动位置追踪曲线以及追踪误差如图11所示,控制气压如图12所示。
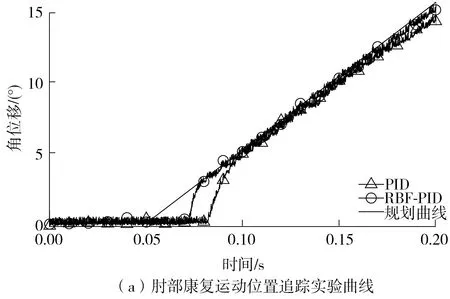
图11 肘部康复运动位置追踪实验结果
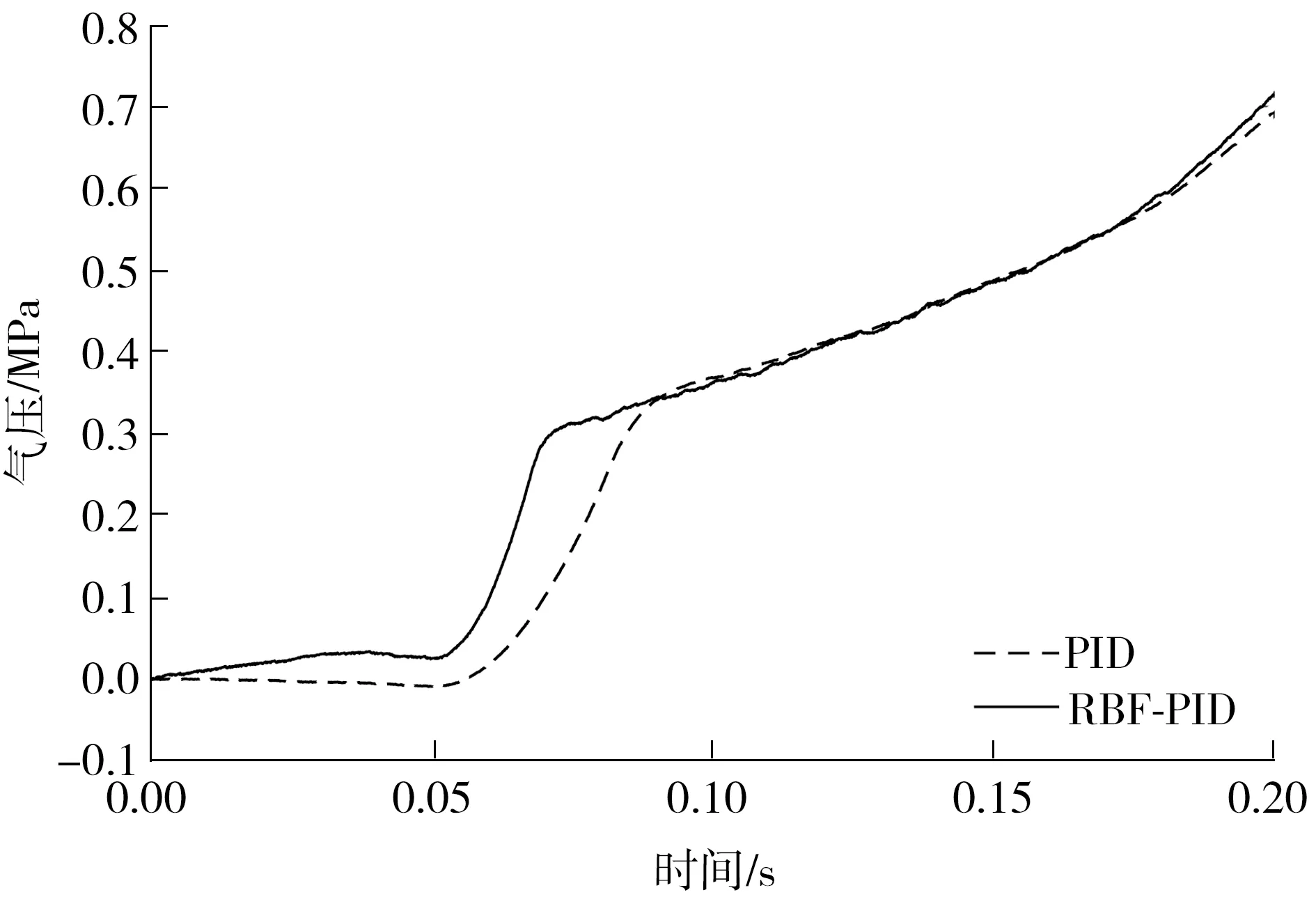
图12 控制气压
由实验结果可看出,所设计的RBF-PID控制器控制效果明显优于传统PID控制器。在肘部康复运动位置追踪实验中,前0.05 s的状态保持运动中两控制器控制效果差别不大,0.05 s之后给定运动信号,RBF-PID控制器在0.07 s左右发生响应,而PID控制器在0.08 s之后响应,可见RBF-PID控制器受系统滞后性的影响较小。在控制精度方面,RBF-PID控制器的运动追踪误差最大为2°,而PID控制器的误差达到3.4°;在稳定性方面,RBF-PID控制实验肘部运动全程较为平稳,而PID控制实验肘部运动在0.14 s和0.18 s左右发生抖振。在实验最后的0.02 s内,由于假人肘关节结构材料的影响,阻力矩变大,PID控制器位置追踪出现1°左右的误差,而RBF-PID控制器抗干扰能力较强,只有0.2°的误差出现。
由于气动人工肌肉存在滞后性,加上气动回路的影响,两种控制器在位置追踪上都表现出一定的滞后作用。在状态保持阶段,RBF-PID控制器针对较小的误差可以做出反应,在运动开始之前输出较小的控制气压,而该部分气压可以实现回路及气动肌肉的预压,从而更快地实现运动响应,减少了气动肌肉及回路迟滞作用的影响。
6 结语
本研究基于人体上肢生理结构特点,设计了柔性穿戴式上肢康复机器人,该机器人避免了传统刚性外骨骼运动干涉的问题,具有高运动柔顺性以及便于穿戴的特点;并通过建模仿真与实验研究,对文中设计的基于RBF神经网络的PID控制器(RBF-PID控制器)的性能进行了验证。结果显示,相较于传统PID控制器,RBF-PID控制器的运动追踪精度高,响应速度快,一定程度上克服了气动人工肌肉的迟滞特性,适用于具有非线性、时变性特点的柔性穿戴式上肢康复机器人系统。
未来将开展结合人体运动意图制定康复训练策略的研究。
猜你喜欢
天然气与石油(2022年4期)2022-09-21
实用手外科杂志(2022年2期)2022-08-31
保健与生活(2022年13期)2022-07-06
中华骨与关节外科杂志(2021年6期)2021-12-05
北京航空航天大学学报(2021年6期)2021-07-20
中华养生保健(2021年18期)2021-02-13
运动精品(2020年11期)2020-11-22
新传奇(2019年40期)2019-11-01
劳动保护(2018年5期)2018-06-05
无人机(2017年10期)2017-07-06