空间机械臂三维全物理地面试验方法研究
2021-07-09 06:41:56刘延芳张昕蕊胡成威
载人航天 2021年3期
曾 磊 ,陈 明 ,朱 超 ,刘延芳 2,张昕蕊 ,金 俨 ,胡成威 ,刘 宾
(1.北京空间飞行器总体设计部空间智能机器人系统技术与应用北京市重点实验室,北京 100094;2.哈尔滨工业大学航天学院,哈尔滨 150001)
1 引言
在轨空间机构工作在失重环境而在地面受重力环境影响,性能发生显著变化,甚至无法开展试验。为测试考核在太空中失重环境下的运动性能,研制一套能够对失重环境进行模拟的装置对于空间探测任务的顺利完成具有非常重要的意义。目前比较常用的模拟方法主要是悬挂法、气浮法和水浮法。悬挂法存在很多外加干扰,精度有限;常规气浮式仿真系统只能提供两维空间的运动模型;水浮法维护费用较高,流体阻尼影响被测对象的运动性能。
中国大型空间机械臂具有7个自由度,地面模拟零重力试验需要实现在三维空间中7个自由度的全物理运动模拟,上述3种方法单独都难以实现。
本文基于气浮平台的零重力模拟方法,提出一种以气浮支撑为主,辅以悬吊的零重力模拟方法,利用气足悬浮+悬吊的方法实现空间机械臂三维空间、七自由度运动的全物理地面模拟,并通过测试试验验证所提出方法的有效性。
2 空间机械臂情况概括
中国空间站大型机械臂具有7个自由度,臂长约10 m,如图1所示。主要包括7个关节、2根臂杆、1个中央控制器、2套末端执行器以及一套视觉相机系统,所有关节均为转动关节,关节的配置采用肩3+肘1+腕3构型方案。关节采用模块化设计,其结构形式完全相同。

图1 空间机械臂构型Fig.1 Configuration of space manipulator
3 零重力模拟系统设计
该零重力模拟系统利用气悬浮原理抵消重力,并通过悬吊和配重实现转动自由度和铅垂自由度的零重力模拟,最终在气浮平台上实现了机械臂的三维空间运动动模拟。零重力模拟系统包括配气系统、气浮支撑装置、气浮平台以及可视化力监测系统。
3.1 配气系统
配气系统由气泵产生高压气体,并通过气管输送给配气柜,由配气柜进行过滤、调压后进行气路转换,输出多路恒定稳定压力气体,提供给各气浮支撑装置的气足,用以抵消重力影响。配气系统可实现供气压力实时显示、管路压力独立调节等功能,满足装配及运动测试需要。通过对气足与气浮平台之间的气膜仿真分析,设计配气系统压缩空气的输出压力为0.6~0.8 MPa。配气柜实物状态如图2所示。

图2 配气柜实物图Fig.2 The photo of gas distribution
配气系统上设有气源截止阀、泄压阀,实现对供气及输出气的截止及配气柜内部管路的泄压,防止配气柜内部管路压力残留。
3.2 气浮支撑装置
基于被动的气浮方案实现大臂在地面状态下的平面零重力模拟。局部采用配重法及相似悬吊法实现整臂末端和回转关节组合体的铅垂向零重力模拟。支撑工装采取气浮及悬吊方式,通过气浮力/悬吊拉力抵消重力影响。经分析比较,采取多孔质气足设计,相比传统的小孔节流气足以及表面节流气足等方式,气足表面压力分布均匀,物体悬浮更加稳定,而且使得应力集中等问题大为缓解,承载能力以及气足过缝能力提高。
根据机械臂工作模式、运动模式、装配方案及收拢压紧姿态,将机械臂分成了3个运动组份,包括肩部运动组份、肘部运动组份、腕部运动组份。针对每个组份分别进行气浮支撑装置设计,确保各部分均可实现微重力受力状态。
结合机械臂地面试验构型以及舱上收拢压紧构型,分析机械臂构型转换过程,将肩部运动组份分成肩部运动组份支撑工装分成肩部转动组份支撑工装及肩部俯仰运动组份支撑工装,因此气浮支撑装置分为4部分:肩部转动组份支撑工装、肩部俯仰运动组份支撑工装、肘部俯仰运动组份支撑工装、腕部运动组份支撑工装。
机械臂各关节及末端执行器均设置有内部的力传感器,用于监测产品工作时的受力情况,为保证各单机之间不受额外装配应力,单机力传感器不受额外干扰,在气浮支撑工装与各单机连接环节之间设计力传感器,用以检测单机受力。
3.2.1 肩部转动组份支撑工装
肩部转动组份支撑工装用于实现肩部末端执行器、肩部回转关节单独实现零重力状态;支持肩部回转关节带动肩部末端执行器进行大范围转动;支持组合体绕肩部回转关节固定轴轴线(即肩部偏航关节动轴轴线)的转动。肩部转动组份支撑工装结构如图3所示。装配时,将肩部回转关节及肩部末端执行器组合体与回转部分工装整体调整为静平衡状态。

图3 肩部转动组分支撑工装图Fig.3 The shoulder rolling movement component brace tool
为适应试验过程中由于平台水平度以及各种安装误差等产生的产品震颤并保证产品的安全,在气浮托架底部加装柔性调整环节,且具备高度调整以及锁定功能,如图4所示。

图4 柔性装置Fig.4 The flexible device
3.2.2 肩部俯仰运动组份支撑工装
肩部俯仰运动组份支撑工装用于实现肩部偏航关节以及肩部俯仰关节的零重力模拟。肩部偏航关节直接安装在如图5所示的关节托架上,通过4组关节支架、力检测敏感器以及微调支架将关节与底部支架固连;肩部俯仰关节与吊板及转动轴承连接,支持俯仰关节绕动轴的转动运动。

图5 肩部俯仰运动组份支撑工装图Fig.5 The shoulder pitching movement component brace tool
3.2.3 肘部俯仰运动组份支撑工装
肘部俯仰运动组份支撑工装用于实现肘部俯仰关节和中央控制器的零重力模拟。如图6所示,对中央控制器采取2层气浮盘气浮支撑的方式实现零重力状态,下层气浮盘供气将上层气浮盘连同中央控制器浮起,既能保证对中央控制器的重力抵消,又能实现肘部俯仰关节与中央控制器之间相对转动时无摩擦。
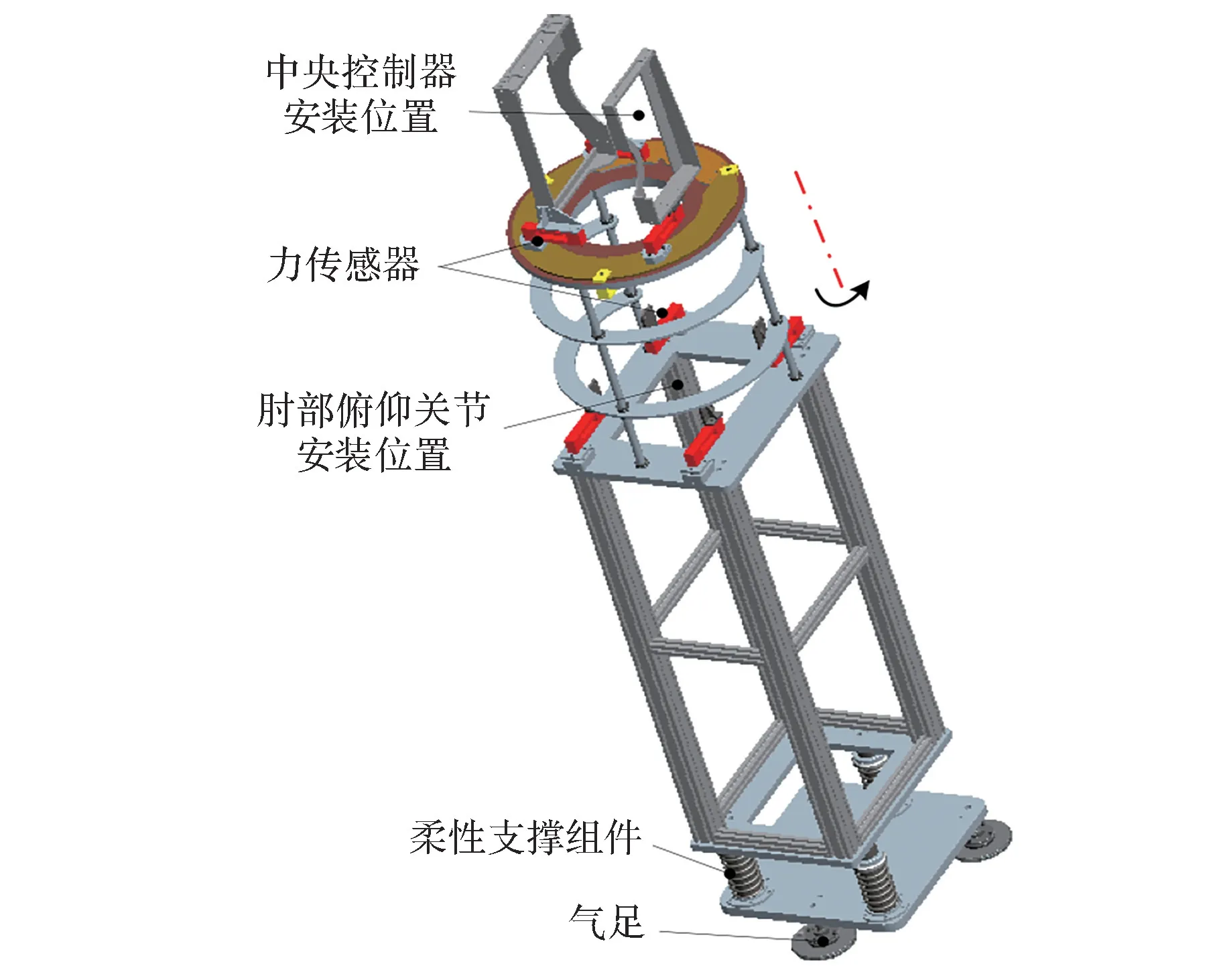
图6 肘部俯仰运动支撑工装图Fig.6 The elbow pitching movement component brace tool
3.2.4 腕部运动组份支撑工装
腕部运动组份支撑工装用于实现腕部俯仰关节、腕部偏航关节以及腕部回转关节、腕部末端执行器的零重力模拟。如图7所示,末端执行器与腕部回转关节均采用平行四边形相似吊架机构进行悬吊安装。腕部俯仰关节通过关节连接支架、力检测敏感器等与底部托板固连,实现零重力;腕部偏航关节通过悬吊架抵消其重力,吊点上部连接有力检测敏感器,实时监测关节运动过程中的受力状态;腕部末端、腕部回转关节跟随腕部偏航关节绕腕部俯仰关节轴线共同回转,自身调整为静平衡状态。

图7 腕部运动支撑工装图Fig.7 The wrist movement component brace tool
3.3 气浮平台
为满足机械臂的运动要求,搭建了10 m×20 m的气浮平台,采取花岗岩拼接而成,如图8所示,承载能力优于5 t/m,拼缝处高度差优于10μm,缝隙宽度小于0.1 mm,整个花岗石平台平面度不大于50μm。整个气浮平台系统设计有隔振沟、调整环节,并配置有激光对射传感器与报警灯,当平台上的试验设备移动至平台边缘并且遮挡住红外线时,进行警报提示。

图8 气浮平台图Fig.8 The air floating platform
3.4 可视化监视系统
为实现对机械臂每个独立部件的实时力检测,在每个独立部件的支撑位置均安装有测力传感器,并设计了可视化监视系统,力传感器通过数模变送器将模拟量转换成数字量,通过标准网线与RS485总线连接,将力传感器的测力数值及重力抵消情况实时显示在屏幕上,如图9、10所示。根据使用需要,设计有历史数据查询功能,可对过往数据进行复查比对。

图9 可视化监视系统检测主机Fig.9 The test computer of visual monitoring system
3.5 零重力补偿精度分析

图10 可视化监视系统组成图Fig.10 The composition of visual monitoring system
本试验系统要求对每个独立部件以及机械臂整体的零重力补偿精度在95%以上,影响补偿精度的误差主要来自2个方面:①敏感器自身测量误差;②气浮平台水平度误差。
敏感器自身测量精度为满量程的0.05%,气浮平台水平度为3″,设关节质量为m
,补偿精度为ε
,质量最大单机底部由4个60 kg量程的力敏感器支撑测量,误差源多,量程大此处误差为最大值,有如式(1)所示计算结果:
ε
=99.74%。分析结果显示零重力模拟精度满足指标要求。这里分析中没有考虑摩擦的影响,考虑摩擦后,零重力实现精度会有所下降。实际试验系统的零重力实现情况可以通过力敏感器进行监测。根据实践经验,对摩擦的影响预留了1%,对产品刚度的影响预留1%,因此,综合评估零重力补偿精度为97.7%。3.6 整臂配平设计
机械臂各单机均通过受拉或受压传感器进行重力支撑,抵消重力影响,在气浮台上装配阶段各俯仰及回转关节的受力平衡较易实现,但涉及偏航及俯仰部分运动的单机受力平衡较为复杂。
肩部末端执行器与腕部回转关节均采用平行四边形相似吊架机构进行悬吊安装,如图11所示,图中A
、B
两点为产品上安装的滚环的吊点,D
点为产品上的实际质心位置。为保证腕部末端执行器及腕部回转关节在水平状态以及上仰的过程中悬吊张力始终通过质心,实现对末端执行器的实时零重力模拟,即通过配重调整将产品上的质心由D
点调整至C
点,要求C
点位于产品的回转轴线上。
图11 相似机构受力分析Fig.11 The mechanical analysis of similar mechanism
设产品质量为G
,配重质量为G
,通过质量特性测试获得产品重量及质心位置的实测值a
,如在E
点上增加配重,为保证增加配重后的合质心过C
点,则可获得E
点需要增加的配重质量如式(2):
b
为配重位置至C
点位置尺寸的水平投影。在工装设计时,保证连杆AA′
=BB′
,且与整体吊点C′
到虚拟质心C
点的连线尺寸相等,并且三者平行。肩部末端执行器及肩部回转关节配平采取图12所示跷跷板形式。同上首先通过质量特性测试,获得肩部末端执行器及肩部回转关节的质量特性,将二者的质心通过配平配至产品轴线上;通过测试再次获得工装跷跷板部分的质量特性,并将当前状态工装跷跷板与产品的质量叠加得到合质量G
,以及质心位置参数e
、f
,在此状态下在工装尾部进行配重叠加,通过模型计算可得到配重质心位置参数c
、d
,且各参数满足式(3)、(4):即可获得配重质量G
。

图12 肩部工装受力分析Fig.12 The mechanical analysis of shoulder brace tool
4 地面全物理试验组装实施
4.1 静平衡状态调整
为满足机械臂运动时,不引入工装、地面环境等因素带来的附加力矩,对肩部末端执行器组份、肩部回转关节及肩部末端执行器组合体组份、腕部末端执行器组份、腕部回转关节及腕部末端执行器组合体组份提出了运动静平衡的状态要求,减小各组份质心相对于回转轴线的偏心距,将不平衡力矩控制在一定的范围内。
机械臂在进行静平衡调试前,首先进行了单机产品的质量特性测试,确定质量及质心分布,对各参与工装进行了称重测试,首先通过模型计算进行配重的初步调整,然后根据测试情况进行迭代优化,最终,各部分不平衡力矩不超过4 Nm。
4.2 装配实施
机械臂部组件数量较多,相邻组件之间均具有较高的精度要求,包括同轴度、轴线夹角、轴线间距等;同时还要保证各组件相对气浮平台的距离及角度精度,以确保运动的平稳性;此外装配过程中还需要满足减载效率要求,保证各单机之间不受较大的相互作用力,造成输出性能损失,甚至运动损伤等。
在装配过程中,通过以下措施保证装配质量:
1)通过对各分组精度保证、最终集成的方式保证最终的装配质量;
2)利用力监视系统对产品安装状态进行监测,在力控制为主、精度控制为辅的原则的前提下,保证各产品的连接受力不大于±5%,并尽量保证产品的装配精度要求;
3)在整臂结构中,将臂杆两端法兰的安装作为整臂装配精度的调整环节,消除整臂的装配角度偏差;
4)针对各组份划分,在各组份装配完成后,对各相对运动部分均安排了回转运动测试,以验证装配结果的正确性和各关节运动的可行性。
机械臂装配完成状态如图13所示,对单机初始装配状态、整臂装配完成后以及气浮台上运动测试状态的重力抵消情况进行整理,如表1所示。通过对比,重力抵消偏差优于5%。

图13 机械臂装配完成状态图Fig.13 The status of space manipulator assembly completion

表1 空间机械臂力监视系统传感器数据汇总Table 1 Summary of sensor data in space manipulator monitoring system
5 三维全物理试验演示验证
机械臂组装后,在气浮台上开展了图14所示三维运动试验验证许用角度以机械臂在气浮台上的装配构型为基础进行分析,此构型下机械臂由肩至腕各关节角度依次为:-180°、﹢90°、﹢90°、+60°、-90°、-90°、0°(表2)。

表2 空间机械臂各关节许用角度范围Table 2 The allowable angle range of space manipulator joints

图14 机械臂三维运动试验状态图Fig.14 The experiment scene of space manipulator three-dimensional movement
以空间机械臂爬行试验为例,试验过程中关节角度、角速度情况如图15、16,可以看出机械臂运动平稳顺畅,试验运行良好。

图15 机械臂爬行试验各关节角度Fig.15 The angles of space manipulator joints in climbing test

图16 机械臂爬行试验各关节角速度Fig.16 The angular velocities of space manipulator joints in climbing test
6 结论
1)系统具备空间机械臂在轨任务的地面三维全物理演示验证能力,验证了机械臂工作的可靠性;
2)系统卸载效率高、支撑关节范围转动大,满足空间机械臂运动测试要求;
3)系统摩擦小,机械臂运动顺畅无卡滞,可实时监测受力状态,对机械臂运动测试附加误差小。
猜你喜欢
传染病信息(2022年6期)2023-01-12 08:58:44
中老年保健(2021年5期)2021-08-24 07:07:36
中老年保健(2021年6期)2021-08-24 06:55:28
中老年保健(2021年7期)2021-08-22 07:42:30
建材发展导向(2021年13期)2021-07-28 07:14:44
上海医学(2019年1期)2019-04-13 05:56:20
测控技术(2018年12期)2018-11-25 09:37:50
电子测试(2018年1期)2018-04-18 11:52:11
制造技术与机床(2017年9期)2017-11-27 02:13:45
自动化学报(2016年8期)2016-04-16 03:38:51