铁路货场平过道道口自动防护系统设计与实现
2021-07-06 09:51张德军邱培军荆长顺
铁路计算机应用 2021年6期
张德军,邱培军,李 映,荆长顺
(1.中国铁路青藏集团有限公司,西宁 810007;2.成都货安计量技术中心有限公司,成都 611731)
近几年,随着我国经济快速发展,铁路货场、物流园区、专用线的新建、改建及扩建,铁路货场、物流园区平过道的数量大量增加,而货场平过道道口是铁路和公路交通的结合部,平过道道口的安全既关系到铁路行车安全,也关系到道路车辆和行人的安全。为加强铁路货场平过道道口运输畅通和行车安全,研究开发一套安全、智能、高效、无人值守的自动防护系统应用于平过道道口,既能保障行人、机动车安全通行,消除平过道道口安全隐患,又能够提高货场平过道道口科技管理和安全管理水平,提高货场调车作业效率,改善铁路货场平过道道口的安全状况,降低平过道道口事故发生率,最大程度保护人民的生命财产安全[1]。
1 系统设计
1.1 系统逻辑结构
根据铁路货场平过道道口自动防护系统结构特点及用户管理需求,系统逻辑结构,如图1 所示[2]。
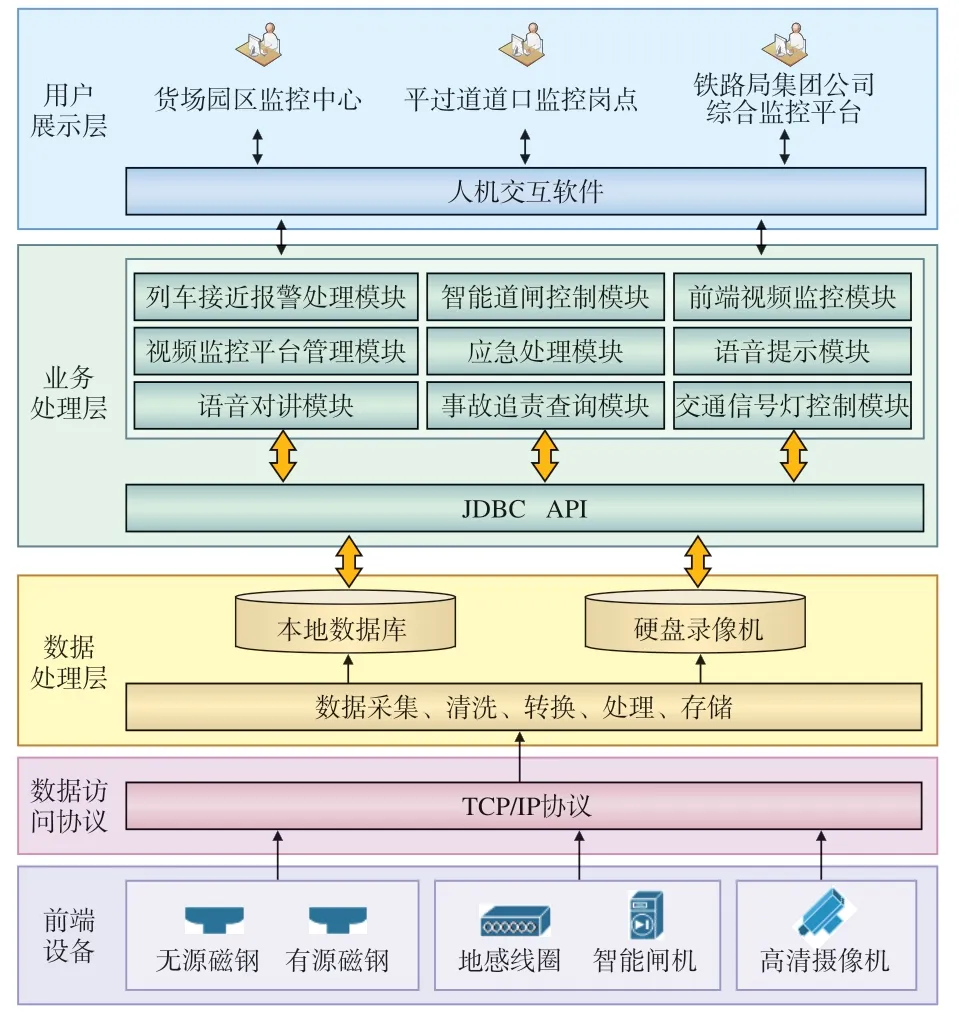
图1 系统逻辑结构
(1)用户展示层:为系统监控人员、安全管理人员及系统管理人员提供人机交互界面,通过该人机交互界面对整个货场平过道过车、智能闸机抬杆/落杆等情况进行实时监控和远程控制。
(2)业务处理层:通过JDBC API 接收经处理后的平过道道口车辆检测及列车接近预警信息,完成现场设备的启动、联锁逻辑及智能闸机、声光提示的自动控制。
(3)数据处理层:通过TCP/IP 数据访问协议,完成地感线圈、远近端磁钢传感器数据的采集、转换、纠错、传输和存储,形成系统相关业务系统的数据源[3],应用服务器安装有MySQL 数据库,实现业务逻辑数据存储和管理,解析处理客户端的请求,把处理后的结果通过网络返回到客户端。
(4)前端设备层:通过前端采集设备实现列车接近平过道道口报警信息、列车通过平过道道口图像视频信息的实时采集,为业务系统通过数据源[4]。
1.2 系统控制工作原理
在铁路货场平过道道口两端钢轨上安装远端无源磁钢和近端有源磁钢。其中,远端磁钢检测列车接近信息,近端磁钢判断列车进出平过道道口方向,记录列车通过轴数。平过道道口安装有智能闸机、检测机动车车辆的地感线圈、平过道道口信号灯、高音喇叭、高清视频监控摄像机,采集平过道道口车辆、行人、列车通行情况及闸机工作状态。
(1)当列车接近平过道道口时,远端磁钢将检测到列车接近信号实时传送给系统中央处理单元,经处理转换后,生成列车接近报警信息,控制平过道道口信号灯状态信息发生变化,高音喇叭开始播放语音信息,警示机动车辆及行人通行。
(2)当平过道道口内停有车辆时,地感线圈输出低电平信号,该信号通过数据线缆传输给中央处理单元,经处理转换后,将控制信号传输给智能闸机和语音控制器,提示司机尽快通过平过道道口,并保持闸机处于抬杆状态,车辆通过平过道道口对侧地感线圈后,传感器输出高电平信号,中央处理单元向智能闸机发出落杆控制信号,同时将催促语音信息转换为列车通过警示信息。
(3)当平过道道口内未停有车辆时,地感线圈输出高电平信号,经中央处理单元处理转换后,生成落杆控制信号,控制智能闸机落杆。
(4)列车通过平过道道口时,平过道道口两端近端有源磁钢开始记录通过车辆轴数,将记录数据实时传输给中央处理单元,中央处理单元对两侧记录的轴数进行比对,当轴数相等时,说明列车已经安全通过平过道道口,中央处理单元向智能闸机发出抬杆控制指令,转化平过道道口信号灯状态信息,切断语音控制器播报,否则,不发出抬杆控制指令[5]。
系统自动控制原理框图,如图2 所示。
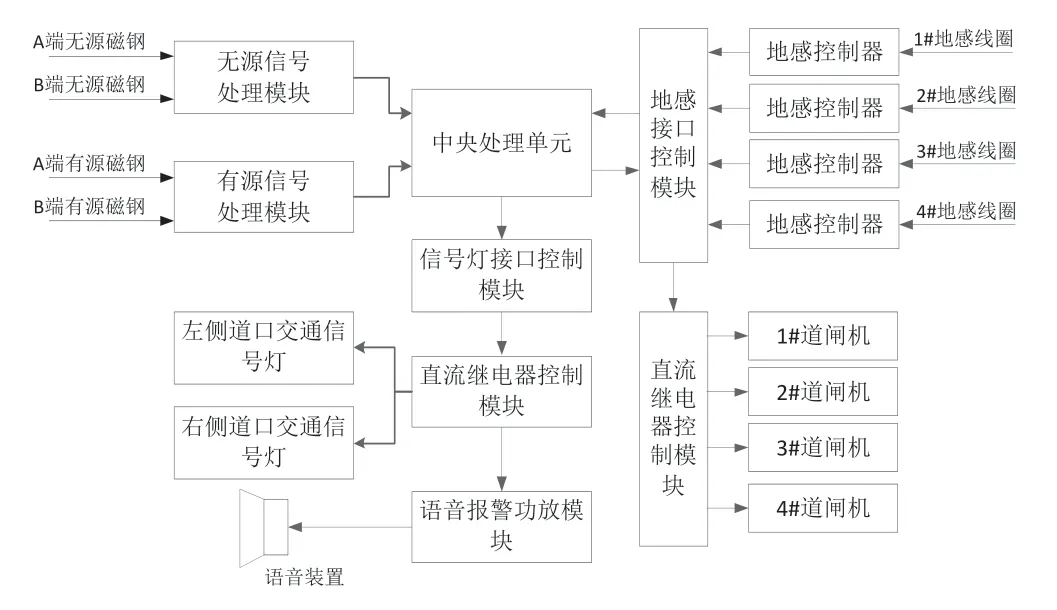
图2 系统自动控制原理
1.3 系统功能模块
系统各模块相互协作,共同配合,完成列车接近平过道道口信号自动采集、传输、存储、转换、输出,实现整个系统的自动控制、信号灯灯光转换及语音警示一系列功能。系统功能模块框图,如图3所示。

图3 系统功能模块
1.3.1 平过道道口列车接近报警检测模块
平过道道口列车接近报警检测模块由远端无源磁钢、近端有源磁钢、无源信号处理模块、有源信号处理模块、中央处理单元、信号灯控制模块和高音喇叭组成。该模块主要负责采集列车接近平过道道口信息,判别列车进出平过道道口方向,记录通过平过道道口列车轴数,并将所采集的信息通过串口服务器传递给室外控制箱中的中央处理单元模块,处理转换后生成相应的控制信号,经接口控制模块控制平过道道口交通信号灯及语音报警装置,实现信号灯状态转换及语音报警,警示行人和机动车禁止通行[5]。平过道道口列车接近报警控制原理,如图4 所示。
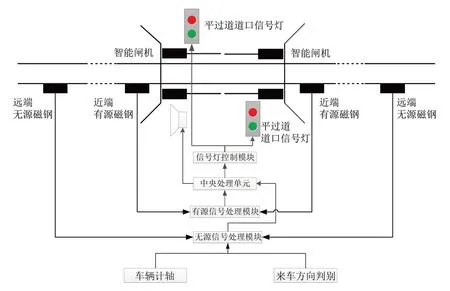
图4 平过道道口列车接近报警控制原理
1.3.2 平过道道口智能闸机控制模块
平过道道口智能闸机控制装置主要由智能闸机、道闸栏杆、地感线圈等装置和部件组成。该模块主要负责控制平过道道口道闸栏杆的落杆与抬杆。
(1)当平过道道口地感线圈检测到平过道道口内有机动车辆时,会将检测到的信号通过数据总线实时发送给室外控制箱的中央处理单元模块,分析处理后生成语音提示信号,通知机动车辆司机尽快通过平过道道口。当机动车辆通过平过道道口后,地感线圈将通过信息及时发送给中央处理单元,生成落杆控制信号,由直流继电器控制模块控制闸机落杆。
(2)当列车通过平过道道口后,中央处理单元分析判断磁钢所记录的轴数,当平过道道口两侧磁钢记录轴数一致时,中央处理单元发出抬杆控制信号,由直流继电器控制模块控制闸机抬杆,同时变换平过道道口信号灯的控制状态,行人和车辆可以正常通行。
平过道道口智能闸机控制原理,如图5 所示。

图5 平过道道口智能闸机控制原理
1.3.3 平过道道口高清视频监控模块
平过道道口高清视频监控系统主要由两台高清摄像机、收发光端机,硬盘录像机和计算机等组成。该模块为一个独立模块,实现货场平过道24h 全天候监控。高清摄像机实时采集平过道道口车辆、行人、列车通行情况及闸机工作状态,所采集的视频信息通过光端机、光缆及网络设备实时保存在视频服务器及监控中心上位机中,监控中心安全员可以通过上位机观察、监视列车通过平过道道口情况,现场设备发生意外时,能够及时通过语音对讲及远端控制做出应急处理。
1.3.4 远程应急控制模块
远侧应急控制模块由上位机、交换机、串口服务器、光端机、中央处理单元组成。当出现特殊情况时,监控中心的安全人员可通过上位机远程应急控制系统发出应急控制命令,通过网络传输到串口服务器,生产串口信号,中央处理单元在接收到该信号处理转换,控制平过道道口闸机抬杆或落杆。
1.3.5 语音警示模块
语音警示模块由语音功放、高音喇叭及通信线缆组成。列车车辆在接近货场平过道道口时,语音警示系统在收到智能道闸机落杆指令后,立即播放“第X 货物线有列车通过,现在准备落杆”,提示通过平过道道口机动车车辆司机、行人及监控中心人员注意。如果闸机栏杆正常落杆后,语音提示2次后停止播放;如果道闸机出现故障,未正常落杆,语音警示系统经判断,发出报警提示,而且重复播放,直到监控中心人员确认后,停止播报。
1.3.6 语音对讲模块
语音对讲模块由麦克风、前端话放、光端机、音频功放、喇叭组成。当火车即将通过平过道道口时,中央控制单元在接收到列车接近报警信号,控制循环播放语音芯片中的内容,警示过往的行人和车辆。
1.3.7 事故追责查询模块
当列车通过货场平过道道口时,高清摄像机对通过平过道道口列车运行及道闸控制状态进行实时录像,录像文件通过视频信号传输线缆存储监控中心硬盘录像机中,当出现事故时,可以通过监控中心上位机按检测点及录像时间调取当时监控录像,以判定事故发生的原因,追查事故责任。
1.4 系统网络结构
系统网络拓扑图,如图6 所示[6]。前端设备控制处理装置通过标准TCP/IP 协议,完成前端设备数据采集、处理和控制,数据存储管理中心实现数据的存储和管理[7]。

图6 系统网络拓扑图
2 系统实现
2.1 系统开发工具
系统由上位机管理系统及现场控制嵌入式系统组成。上位机管理系统客户端架构使用基于ExtJS的Web desktop 应用框架,系统服务端逻辑功能使用Visual C#语言实现平过道道口业务逻辑处理和控制。现场控制嵌入式系统采用Visual Studio 开发工具,实现车辆列车检测传感器信号采集、处理,智能闸机、交通信号灯等子系统自动控制和管理。
2.2 关键技术
2.2.1 货场平过道道口数学模型
平过道道口是铁路货场内火车、汽车及行人通行交汇点,在实际应用中复杂多变,从种类上主要分为贯通式、尽头式2 种平过道,这2 种类型的平过道道口根据线路又可分为单股道、多股道平过道道口。有无道岔,是否有共用节点等实际应用情况,导致即便是同一个站场内的平过道道口也可能不会完全一致,如何开发出一套系统能够适用于所有的平过道道口自动防护装置系统成为了一个急需解决的技术难题。
项目组成员通过对国内大量的货运站场平过道道口分布场景进行调研,提出根据项目功能需求将平过道道口应用抽象为一个统一的模型,这个模型既能够满足项目的功能需求,也能够实现将任何复杂的平过道道口都分解为不同数量的基本模型,站场平过道数学模型,如图7 所示。

图7 站场平过道道口数学模型
在平过道道口的左右两侧各布置2 个传感器,远离平过道道口的信号监测传感器作为车辆信号触发装置,当有列车接近或列车离开检测区间时,将相关信号数据进行上传,接近平过道道口的位置传感器作为车辆位置检测装置,判断列车是否已经或即将行驶到平过道道口位置,位置传感器应离平过道道口较近以便于判断列车是否已经正在平过道道口内,可减少列车被卸载到检测区间内并触发位置传感器信号导致误判车辆未出清的情况。
模型1:单股道无道岔
单股道无道岔数学模型可以简化为,如图8 所示。

图8 单股道无道岔数学模型
列车具有2 条进路:A→B、B→A,如果平过道道口为尽头线则只有一条进路。
模型2:单股道有道岔
单股道有道岔数学模型可以简化为,如图9 所示。
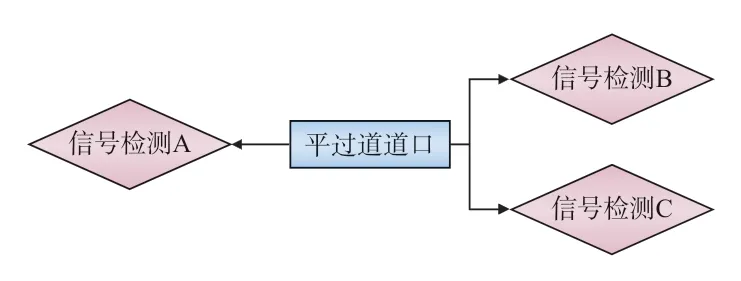
图9 单股道有道岔数学模型
列车具 有4 条进路:A→B、A→C、B→A、C→A,如果平过道道口为尽头线则只有2 条进路。
模型3:多股道无道岔
多股道无道岔数学模型可以简化为,如图10 所示。
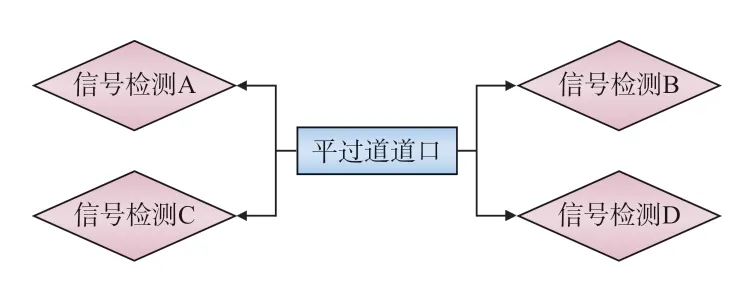
图10 多股道无道岔数学模型
列车具有4 条进路:A→B、B→A、C→D、D→C,如果平过道道口为尽头线,仍可归纳为该模型。
模型4:多股道有道岔
多股道有道岔数学模型可以简化为,如图11 所示。

图11 多股道有道岔数学模型
列车具有8 条进路:A→B、B→A、A→D、D→A、C→D、D→C、C→B、B→C,如果平过道道口为尽头线,仍可归纳为该模型。
(1)平过道道口的算法实现了从数学模型到功能需求的转化,借鉴微机联锁的设计思路,将平过道道口的所有轨道线路在软件上转换为逻辑链路,每条逻辑链路都是一个基本的平过道道口数学模型,多条逻辑链路在实际工作中可能出现车辆运行状态不一致的情况,比如一条逻辑链路为来车状态需要道闸落下,另一条逻辑链路可能为车辆出清状态需要道闸开启,在同一平过道道口下不可能出现2 种不同的控制状态,因此需要对同一平过道道口下的所有逻辑链路进行状态归一化处理,保证一个平过道道口只能有一个控制状态。
(2)根据铁路系统导向安全的设计原则,在同一平过道道口不同逻辑链路出现道闸开启、关闭的状态时,应该取关闭状态。
(3)对于同一平过道道口不同逻辑链路共用检测传感器节点的情况,需要在车辆进入后对共用节点的逻辑链路状态进行更新保证共用节点的情况下只有一条正确的逻辑链路为来车状态,防止因共用节点在程序判断中出现2 条逻辑链路都为来车状态,最终出现车辆出清后道闸正确开启后又落下的情况,逻辑链路中的所有传感器节点都为可映射配置,可配置当前传感器在整个逻辑链路的左侧远端、左侧近端还是右侧远端、右侧近端,同时可配置当前传感器的物理端口映射,保证当前接收的数据与映射配置正确对应[7-8]。
2.2.2 双CAN 冗余设计
采用独立的两路CAN 总线实现命令的传输,程序内部算法处理保证接收到的双CAN 命令或参数只执行一次,防止同一条命令因此双CAN 接收到2 次从而执行2 次的问题,当一路CAN 总线故障时则可自动切换到另一路CAN 总线,保证CAN 通信网络畅通。
3 系统实施方案
3.1 平过道道口列车接近报警检测装置
对于贯通式线路,应在距货场平过道道口200m处两端安装远端车轮传感器,在距货场平过道道口20m 处两端安装近端车轮传感器;对于非贯通式线路,应在距货场平过道道口200m 处一端安装远端车轮传感器,应在距货场平过道道口20m 处一端安装近端车轮传感器。
3.2 平过道道口高清视频监控系统
在距离平过道道口中心约3m 远的位置两边各安装1 根水泥杆,在水泥杆距地面3m 处的L 型悬臂横杆上各安装1 台高清摄像机,相互对射,确保能够辐射整个平过道道口区域,实现平过道道口24h全天候,无死角监控。视频图像通过带宽为100Mbit/s的场内局域网实时传输到硬盘录像机。为了确保所采集的图像质量,各平过道道口设置有夜间补光灯。
3.3 智能闸机控制系统
智能闸机控制系统主要由智能闸机、电子档杆、地感线圈及处理控制系统组成。在铁路货场平过道道口两边3m 远的位置安装4 台智能闸机,用于平过道道口有火车时拦截平过道道口两边的车辆,在距离铁路股道钢轨两边2.5m 远的位置安装4 个地感线圈,用于检测平过道道口内是否停有机动车辆;处理控制系统用于实现智能闸机抬杆落杆业务逻辑处理[9]。
4 结束语
铁路货场平过道道口自动防护系统的设计与研究,使铁路货场平过道安全管理从“人工时代”转向“智能时代”,提高了货场平过道道口科技管理水平及货场调车作业效率,保证了货场各运输工具、机动车辆和人员的安全,防止发生行车和人员伤亡事故,实现了平过道道口控制自动化和无人值守的设计目标,通过对系统的研究与设计,为铁路货场平过道道口安全管理积累了宝贵经验,有利于推动货场平过道道口安全防范措施的落实和管控。
猜你喜欢
铁路通信信号工程技术(2022年1期)2022-02-11
电子乐园·中旬刊(2021年3期)2021-12-27
作文通讯·初中版(2021年10期)2021-12-21
铁道通信信号(2021年5期)2021-12-09
电子乐园·中旬刊(2021年1期)2021-09-10
铁道货运(2021年3期)2021-04-29
设计(2020年24期)2020-01-25
中国工人(2017年8期)2017-09-03