
智能机器人巡检系统安全性与应用性研究
2021-07-04 02:53:12郝育红
煤炭与化工 2021年5期
郝育红
(冀中能源峰峰集团 企管部,河北 邯郸056107)
0 引 言
随着经济和科技的高速发展,我国电力生产化水平不断提高,并向智能化的方向发展。变电站作为电网的核心部位,自动化水平也日益提高。随着无人值守化的普及,变电站巡检质量得到重视,传统的巡视方式已不能满足现代化变电站发展的要求。
智能机器人巡检系统在变电站中的科学合理应用,打破了传统人工巡检的局限性,取得了良好的应用效果,提高了设备运行维护人员的工作效率和巡检质量。
智能机器人巡检系统在一定程度上取代了人工的巡检工作,有效的推进了变电站无人值守的进程,智能机器人代替人工巡视,将是未来的主要发展方向。
1 变电站巡检技术分析
1.1 传统变电站巡检分析
变电设备巡视是保证变电站安全运行的一项重要制度。传统变电站设备的巡视是由值班运行人员在现场进行的。
变电站的值班员在进行人工巡检时,主要是通过看、触、听、嗅等感官对运行中的设备进行感观的、简单的定性判断,并采用手工纸介质记录的工作方式。
人工巡检时受人员的生理、心理素质、责任心、外部的工作环境、工作经验和技能技术水平的影响较大,会存在漏巡、漏发现和记录信息偏差的可能性。
巡视人员巡视设备时,需要站在离设备较近的地方,这样会危害到巡视人员的人身安全。
综上所述,无人值班变电站的人工巡检存在及时性、可靠性差,管理成本高,无法准确考核巡检人员工作状态,巡视效率低下等明显缺陷。
随着无人值守变电站的普及,对变电站巡检要求也逐渐提高,传统人工巡检已不能满足未来变电站巡检的要求,改革传统落后巡检方式势在必行。
1.2 智能机器人巡检系统
变电站巡检系统中所采用的智能机器人是由多传感器融合技术与机电一体化技术、导航与行为规划技术、安防技术、无线传输技术等多种现代化先进技术集成应用设计实现的。
智能机器人在变电站工作中能够通过完全自主或遥控操作模式,替代传统人工巡检方式,对变电站各设备及有关项目进行巡检。
巡检内容包括设备温度、设备外观、开关分合状态、仪表等,具有检测方式多样化、智能化、巡检工作标准化、客观性强等特点。
巡检系统集巡视内容、时间、路线、报表管理于一体,并在图像分析及判断基础上,对变电站运行中出现的故障问题和异常情况进行快速捕捉和及时上报,为无人值守变电站的建设与推广应用提供技术支持,进而促进电网的稳定与可靠的运行。
相比传统的人工巡检方式,智能机器人巡检系统主要有以下优势:
(1)通过视频模块,实现对设备状态的监测,操作前后状态的核对等业务功能,减轻工作人员的劳动强度,提升巡检的效率,降低变电设备的运行及维护成本,节省大规模安装固定摄像头的采购和维修的成本。
(2)巡检系统采用数字化处理方式,在保证数据时效性的同时,实现标准统一和描述统一,从而提升了系统的智能化水平和信息化管理水平,减少了管理成本。
2 智能机器人巡检系统的特点
2.1 系统组成
智能巡检机器人管理系统分为过程感知层、主控管理层和远程系统层。
(1)过程感知层
过程感知层是智能巡检机器人搭载高清摄像机、红外热成像仪、音量探测器、温湿度传感器等设备,对变电站设备的健康状态进行精准采集,监控感知变电站设备及环境状态。
(2)主控管理层
智能机器人采集的设备状态数据,实时传输至机器人后台,所监控的数据可进行移动平台的智能共享,使得数据管理和传输更加便捷、安全、智能。
(3)远程系统层
数据与调度部门实时远程共享,并输出相关设备的缺陷诊断报表,为决策层提供决策依据,实现了数据更加可靠,更加智慧。
2.2 系统特点
智能巡检机器人管理系统具有巡检自主化、导航无轨化、视频监控智能化、图像识别精准化、异常处理功能、环境实时监测、自主供电系统、网络通信系统等多种优势。
2.2.1 巡检自主化
智能机器人可替代人工进行日常的巡视和检测工作,具有自动巡检的功能。机器人按照每日规划的巡视和检测任务,根据预先设定的巡检点的位置,沿着预定的轨迹,依次进行自动巡检,实现了变电站信息检测的全覆盖、全检测。
智能巡检机器人开展的巡视和检测工作系统也支持定点或定任务巡检。只需通过后台系统,选择想要进行巡视的巡检点,向机器人派发临时巡检任务,机器人就会按照选择的任务内容,规划出最优的巡视路径,即可完成巡检任务。
2.2.2 导航无轨化
巡检机器人无轨化导航方案是通过机器视觉相机的导航系统实现的。巡检机器人进入巡检环境之前,预先设计好巡检路径,并在固定的巡检点粘附二维码以形成巡检路线。当进入巡检环境后,再进行地图数据的同步,即可开始执行巡检任务。
2.2.3 视频监控智能化
智能巡检机器人系统搭载的高清摄像机,采集实时的现场图像,并经过无线网络系统进行实时传输,并设置网络中继以保证视频不丢包,不失真,最大范围的进行设备及环境的监控。
智能巡检机器人管理系统平台可实现视频存储、分发、系统配置、实时监视、信息发布、视频查询、视频回放、实时控制、抓图、抓录等多种功能,真正实现了智能巡检机器人视频监控的智能化管理。
2.2.4 图像识别精准化
智能巡检机器人系统针对不同设备图像对象(指针类、分合类、文字类等),采用不同算法进行分类特征提取,保证训练特征的稳定性,进行分类识别,识别数据结果,实时输出。2.2.5 异常处理功能
变电站中应急事故主要是指设备发生停电、起火、爆炸等严重威胁变电站设备财产安全和巡检人员人身安全的生产事故。
发生以上事故时,可以利用机器人作为前锋,第一时间深入现场,利用移动高清视频,协助运维人员观察设备的实际状况。
利用机器人实时传送现场信息,有利于组建远程网络专家的联合分析队伍,加强设备疑难缺陷分析的实时性,便于人员在远方快速了解现场情况,掌握现场动态。
通过机器人排查其他设备,快速掌握设备的故障情况,及时确定处理方案,从而保障人员的人身安全。
2.2.6 环境实时监测
智能机器人具有可见光摄像机等设备,并能将所采集的视频上传至监控后台。工作人员可通过上位机软件操作监控系统移动到指定位置,控制云台自由转动,实现近距离地观察和拍摄目标物体,将监控范围覆盖到盲区。
机器人可对周围环境进行视频图像的采集,并根据工作人员的需要,将图像信息经网络传回运维班组,并自动记录拍摄地点和设备的名称,以备工作人员日后能查询完整的信息。
2.2.7 自主供电系统
智能巡检机器人采用220 V交流供电,在现场进行选择相关便于取点的位置,布置机器人的充电装置。
在执行任务过程中,机器人实时监测电量情况,如出现电量过低,则自主触发返航充电任务,并发出电量过低的警告。
智能巡检机器人返航至充电位置,执行自主充电任务,并确认是否充电成功,如未充电成功,则重复执行充电任务,待充电完成后,继续执行巡检任务。
2.2.8 网络通信系统
过程层智能巡检机器人搭载智能感知传感器,通过无线传输至局域网,再通过主控终端接入管控平台。
3 智能机器人巡检系统在变电站的实际应用
电业分公司首先在35 kV梧桐庄变电站、北大峪变电站进行了实际应用。
针对梧桐庄变电站现场布置情况以及功能需求,采用一套室内轮式智能巡检机器人,进行主控室与6 kV高压室全覆盖,通道门在机器人运行时处于常开状态,实现设备状态智能化管控,数据实时共享。考虑到由于35 kV高压室区域,每个柜体外表设备数据较少,且与6 kV高压室不在同一个区域,布置一套机器人的性价比较低,所以不在该区域布置机器人。
针对北大峪变电站现场布置情况以及功能需求,采用一套室内轮式智能巡检机器人,进行6 kV高压室2个室全覆盖,通道门在机器人运行时处于常开状态。实现了设备状态的智能化管控,数据实时共享。
3.1 巡检任务内容
智能巡检机器人巡检任务包括以下内容:
(1)内屏柜外观检查;(2)开关运行指示灯、数字显示、投退状态;(3)刀闸遥控状态;(4)开关量模块检修状态;(5)温湿度控制器温度、湿度显示;(6)远方/就地切换把手状态;(7)带电显示器电源颜色;(8)带电显示器闭锁颜色;(9)室内温湿度监测。
3.2 路径规划
35 kV梧桐庄变电站机器人路径规划如图1所示。
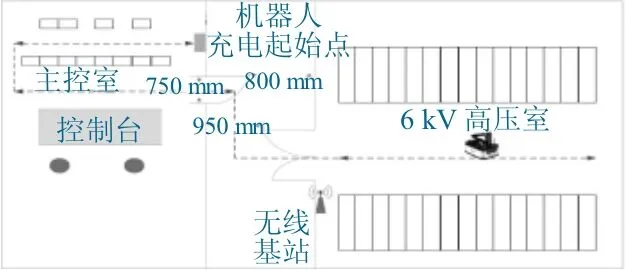
图1 35 kV梧桐庄变电站机器人路径规划Fig.1 Path planning of robot of 35 kV Wutongzhuang substation
35 kV北大峪变电站机器人路径规划如图2所示。
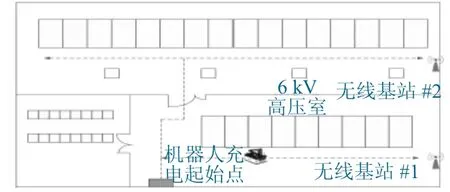
图2 35 kV北大峪变电站机器人路径规划Fig.2 Path planning of robot of 35 kV Beidayu substation
3.3 室内智能巡视解决方案
以室内机器人移动巡检为主,搭载可见光摄像机、温湿度采集设备等传感器,同时具备自动升降功能,可对设备及环境状态进行全面监测。
室内巡视方案由机器人、监控系统、机器人充电桩、通信基站等4大部分组成。
机器人巡检可有效地替代巡检人员进行繁琐、重复的巡检任务,可及时发现高压室二次设备的隐患和缺陷;充电是供机器人完成自主充电;机器人通信基站用于机器人与监控系统间数据通信的网络设备。
3.4 充电桩布置方式
智能巡检机器人采用220 V交流供电,在现场进行选择相关便于取点的位置,布置机器人充电装置。在执行任务过程中,机器人实时监测电量情况,如出现电量过低,自主触发返航充电任务,并发出电量过低的警告;返航至充电位置,执行自主充电任务,并确认是否充电成功,如未充电成功,则重复执行充电任务,待充电完成后,继续执行巡检任务。
3.5 工作站布置方案
智能机器人系统工作站和服务,均布置在主控室工作台的位置,便于工作人员操作,同时对设备状态进行实时监控。
4 结 语
智能机器人巡检系统已在变电站中进行了实际应用,该系统将逐渐取代运行人员完成变电设备的日常巡视、红外测温、操作前后设备状态检查等工作,不仅实现了设备巡视工作的无纸化和信息化,提高了设备巡视的工作效率和质量,降低了运行人员的劳动强度和工作风险,同时,提升了变电站的智能化水平,为变电站无人值守提供了更先进的技术支撑平台。
猜你喜欢
疯狂英语·新读写(2021年10期)2021-12-07 02:41:30
新世纪智能(英语备考)(2019年4期)2019-06-26 00:49:04
铁道通信信号(2019年11期)2019-05-21 03:06:06
电子制作(2018年8期)2018-06-26 06:43:34
中国公共安全(2017年8期)2017-10-13 08:12:17
电子制作(2017年8期)2017-06-05 09:36:15
现代工业经济和信息化(2016年5期)2016-05-17 05:35:57
少儿科学周刊·少年版(2015年4期)2015-07-07 21:13:44
少儿科学周刊·少年版(2015年4期)2015-07-07 21:09:31
少儿科学周刊·少年版(2015年4期)2015-07-07 21:08:08
