基于三维点云的隧道施工开挖面岩体结构面迹线识别
2021-07-02 07:18杨剑
铁道标准设计 2021年6期
杨 剑
(1.中铁第四勘察设计院集团有限公司,武汉 430063;2.水下隧道技术国家地方联合工程研究中心,武汉 430063)
引言
在隧道施工中,对隧道地质情况认识不足而给隧道工程带来不良后果的情况时有发生。传统人工地质素描难以快速客观记录隧道施工开挖面的地质状况,需地质记录人员结合现场情况根据经验进行判断记录,其结果难以准确反映实际地质情况,不利于对真实情况的掌握。近年来,数字图像处理技术.三维激光扫描技术引入隧道工程中,用于快速识别岩体结构面迹线,以提高开挖面地质情况的记录效率。
国内外学者对近似结构面迹线的目标进行了大量识别研究,如高速公路道路裂缝识别[1].隧道衬砌表面裂缝识别[2].岩体裂隙提取[3-9]等。这些研究主要考虑裂缝或岩体结构面迹线位置像素与周边像素灰度值差异,实现自动提取。许多隧道开挖面岩体上结构面迹线像素与周边区域像素对比度不明显,同时隧道工程中往往存在光线不足.扬尘较多等情况,环境恶劣,图像不够清晰等[10],影响迹线提取效果。
三维激光扫描技术采集数据时无光线要求,可直接获取被测物体表面三维坐标及灰度信息,在隧道中得到推广应用。一些学者根据同一结构面上点云近似在一个平面上的特点,研究基于三维激光扫描点云岩体结构面自动识别方法[11-18],若结构面上点云起伏较大,则识别效果欠佳。SEERS等[19]基于图像的边缘检测技术(相位一致性)获得裂隙迹线;THIELE S T等[20]将最小代价路径方法应用于三维点云的岩体迹线提取,其根据颜色.梯度代价函数等计算权值。
由于隧道开挖面岩体结构面及迹线图像的复杂性,目前对结构面及迹线自动化识别效果仍有待进一步提升。考虑岩体结构面迹线处空间相对位置关系,提出一种基于点云的迹线半自动识别方法,以提升结构面迹线识别效果。
1 扫描原理及点云处理流程
三维激光扫描技术是对被测物体发射激光,然后接收被测物体表面反射激光信号,对被测物体进行快速精确扫描的一种技术。能够根据扫描所得信息,精确重构被扫描物体表面轮廓点云。其数据采集原理为:三维激光扫描仪向被测物体表面发射激光,记录发射激光时的垂直旋转角度α.水平旋转角度β,测量发射激光到返回之间时间差,计算出被测物体与扫描中心距离S。通过α.β.S可计算出三维激光扫描目标点P(xs,ys,zs),即
(1)
通过三维激光扫描仪获取点云数据后,根据点坐标和灰度值或反射率可重现隧道内部扫描区域面貌。一般对点云数据而言,结构面迹线可认为是由颜色相似.在掌子面上连续内凹或外凸部分点组成,本研究期望通过隧道三维点云数据,通过人工干预,半自动识别出隧道开挖面上的岩体结构面迹线。该方法流程如图1所示。即通过数据预处理得到开挖面区域点云数据,经二次球面投影和平面投影后,对点云数据进行Delaunay三角剖面,根据构成三角面边的特征,建立最小代价算法,对给定两点间的最小代价路径进行识别。

图1 自动识别结构面迹线流程
2 点云数据处理
2.1 数据预处理
对隧道开挖区域进行三维激光扫描,点云数据一般包含远离掌子面区域的支护结构区域.隧道施工开挖面区域(图2),通过预处理截取开挖面岩体部分以作后续分析。

图2 隧道三维激光扫描点云原始数据
开挖面区域点云数据量仍然较大,处理海量点云数据对电脑硬件.处理算法的效率要求较高且耗时较长,通过对原始点云进行均匀采样,以尽量减少点云数量,同时保留岩体形状特征信息。
2.2 点云投影
隧道开挖面岩体不完全在同一平面上,故不能直接采用平面投影点进行三角剖分,将开挖面三维曲面重建。
根据三维激光扫描仪由扫描中心向四周发射激光的特性,采用二次球面投影和平面投影对开挖面点云进行空间数据转换,再进行三角剖分,具体步骤如下。
(1)对点云数据进行坐标转换,建立以扫描中心O为原点,施工开挖方向为x轴正方向.z轴正向为垂直向上的局部三维坐标系。
(2)将点云数据投影至以原点O为球心,半径为r的球面上。
(3)以O'(-R,0,0)(R≥2r)为圆心,R为半径进行第二次球面投影。
①若第一次投影点x≥0,以原点O为端点.过投影点射线与第二个球面的交点为第二次球面投影点。
②若第一次投影点x<0,以投影点在x轴上的垂足为端点.过投影点射线与第二个球面的交点为第二次球面投影点。
(4)将第二次球面投影结果投影到yz平面上。
所有点云经过二次球面投影后分布在半径为R的半球面上,投影至yz平面后其相对拓扑关系将保持不变。
在图3(a)中,经截取.重采样和坐标转换后的开挖面区域点云数据上的点A~G,经一次球面投影后依次为A1~G1,而后投影至yz平面为B2A2C2D2E2G2F2,拓扑关系发生改变。在图3(b)中通过二次球面投影后再进行平面投影,则始终保持原始拓扑关系。

图3 球面投影+平面投影示意
2.3 构建三角网
三角剖分技术是一种应用非常广泛的面重建技术。三角剖分将散乱点云数据剖分为曲面三角形网格模型,Delaunay三角剖分是一种特殊的三角剖分。
在点云投影时,已经建立点云投影前后点间映射关系,在生成最终投影平面点云后,采用Delaunay算法构建平面三角网,根据映射关系,即可建立空间开挖面曲面三角网格模型。图4为局部掌子面点云数据三角剖分测试效果。

图4 隧道开挖面曲面模型
2.4 识别结构面迹线
本研究通过人机交互寻找最小代价路径方式提取结构面迹线。最小代价路径是一种基于机器视觉的人机交互式分割算法,其将图看作带权连通图,可连通的相邻点间都赋予一个局部代价值,该值也被认为是边的权重。通过人工在图像上给出一个起点,计算鼠标确定的起点到终点间最短路径,即为分割结果。
在点云三角剖分模型中,寻找最小代价路径的核心内容是建立代价函数,代价函数主要用于向结构面迹线裂隙.裂缝处移动,并抑制它们之间的移动。采用Dijkstra算法,计算用户自定义起点.终点间最小代价路径,以提供相应轨迹路线。一旦确定轨迹路线,就可通过添加中间点,并重新计算相应最低代价路径来进行手动调整,大大提高准确性。
在开挖面上的点云数据,受施工开挖影响,结构面迹线灰度值连续性差,与周边区域对比度不一定高,为综合评判边的代价,采用夹角.方向代价函数。为保证每个代价函数的独立性,方便组合,每个代价函数的代价值均限定在0~1。
(1)夹角
结构面迹线可认为是由于结构面不连续,即结构面方向“突变”形成(图5)。迹线两侧曲面在迹线处夹角一般远小于180°。

图5 结构面突变处迹线
在图6中,三角形面片ABC和BCD组成一个二面角,α为两三角面片的夹角。将C1=α/π作为BC成为结构面迹线的代价之一。α越大,则两三角形越接近同一平面,BC位于结构面迹线上的可能性越低。

图6 三角面片及夹角
(2)方向
在隧道开挖面上,岩体结构面迹线在较小范围内近似于直线[1],通过添加方向函数,确保识别路径无明显偏离。
设三角网中选定的结构面迹线上两点为Ps.Pe(图7),对任意一条三角形边PiPj,点Pi与点Ps.Pe构成的夹角为βi,点Pj与点Ps.Pe构成的夹角为βj,则三角形边PiPj相对于Ps.Pe的代价为

图7 结构面迹线起终点及三角形边
C2=max(βi,βj)/π
(2)
(3)三角形边筛选
分析三角形边的夹角.方向时,对于远离起.终点的边进行筛选。如图8所示,三角形边AB.AC.DE至少有1个端点距以Ps.Pe为端点的线段距离小于给定值r,将这些边作为可评判代价的边;BC两端点距线段PsPe的距离均大于r,则筛除BC。
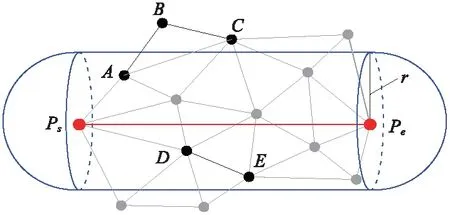
图8 距离筛选
(4)最小代价路径
将图8所示点云数据三维曲面视作带权无向连通图G=(V,E),其中,V是点的集合,E是边的集合。各边的代价为
C=C1+2C2
(3)
根据连通图中起点和终点,逐步计算各点到起点的代价,并选择代价最小点为路径上的点,然后连接代价最小的点形成终点至起点的一条路径,即为最小代价路径[21-22]。
图9(a)为相邻点到Ps的初始代价,其中,A0到Ps的代价最小,故选择A0计算其相邻点B0.B1经A0到Ps的累积代价(图9(b)),然后找到A1.A2.B0.B1.A3中最小累积代价点继续分析,直至查找到Pe,即形成了从Pe到Ps的最小代价路径(图9(c))。

图9 最小代价示意
(5)曲线拟合
最小代价路径是由多条三角形边首尾连接形成的空间多段线,其上的点未必在结构面迹线中心位置,且通常不是平滑曲线,通过多段线拟合,将最小代价路径拟合为平滑多段线,便于展示和分析。
如图10所示,原最小代价路径通过拟合形成以顶点A~F构成的多段线。各顶点均在最小代价路径上,且最小代价路径在某两相邻顶点间的任意一点到以这两点为端点的线段距离均小于给定值d。

图10 多段线拟合示意
3 实例分析
为验证所提方法的实用性,对某隧道施工现场连续采集开挖面区域三维点云数据,三维激光扫描仪型号为FARO Focus3D X130。
对原始点云图像截取3块局部开挖面区域点云数据,经降噪处理二次球面投影.一次平面投影.Delaunay三角剖分后,以人工点选结构面迹线关键点对剖分结果进行迹线识别。
图11(a).图11(c).图11(e)为岩体区域点云三角剖分网及选择结构面迹线上部分关键点后自动生成的最小代价路径,路径上的各线段均为三角剖分网中的三角形边。图11(b).图11(d).图11(f)为对应的最小代价路径多段线拟合结果。从图中可以看出,点云数据三角网未出现不合理构网区域。在图11(a).图11(c).图11(e)中,自动生成的最小代价路径基本位于各结构面迹线位置,同时,结构面迹线呈锯齿状,这是由三角网构网特点决定的。在图11(b).图11(d).图11(f)中,经过多段线拟合,原结构面迹线变成光滑多段线,同时仍位于结构面迹线处,说明拟合效果较好。
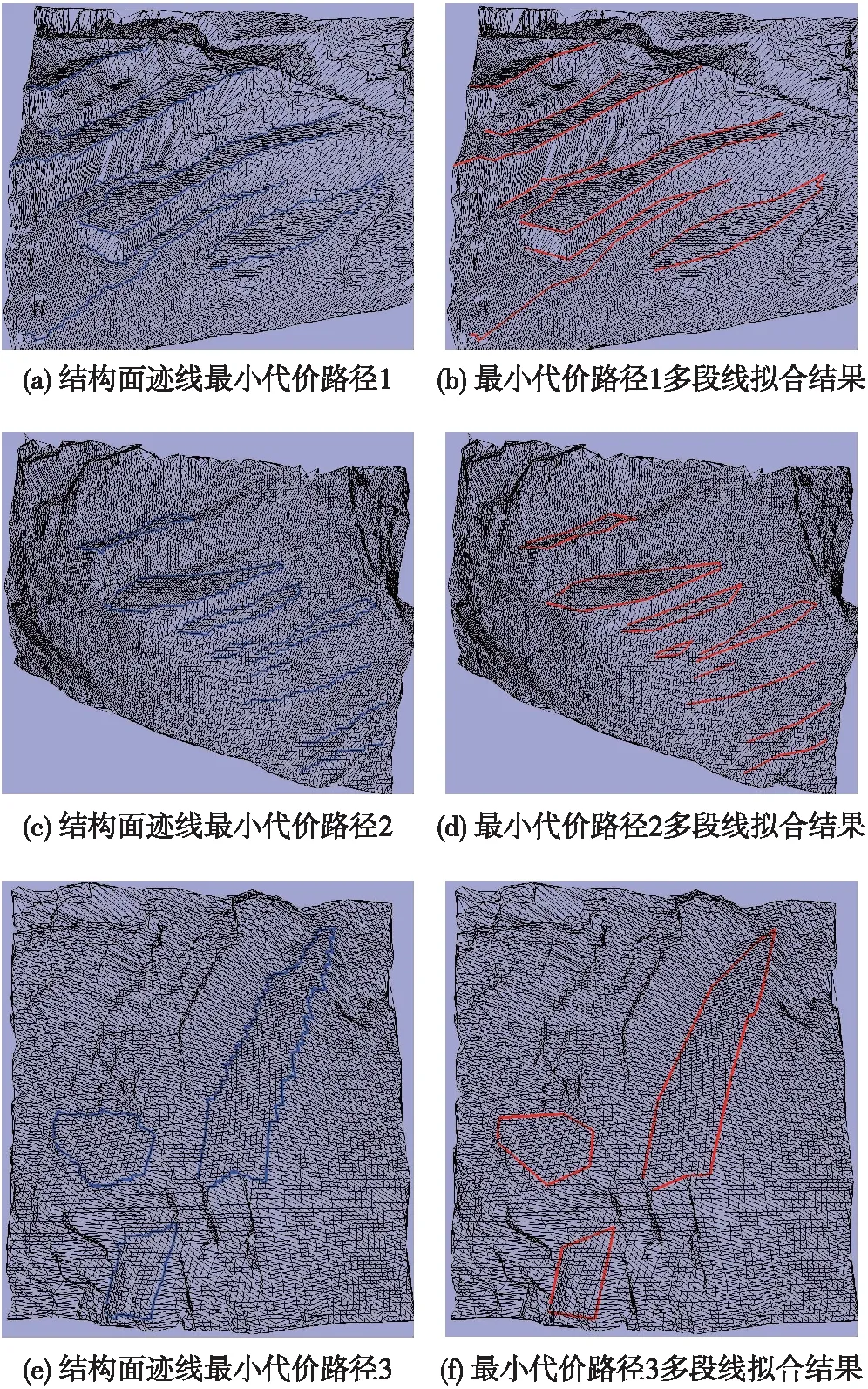
图11 结构面迹线识别结果
对图11各结构面岩体中结构面迹线识别结果与人工提取结果进行对比,结果如表1所示。其中,“点数”为人机交互在岩体结构面迹线上点选的关键点;“计算用时”为生成最小代价路径耗时;“半自动提取”即点选关键点结合最小代价路径方法自动提取出结构面迹线。
从表1可以看出,在各岩体三角网曲面中,人工提取点数均高于半自动提取点数,半自动提取时点选数量比人工提取时降低约50%。这是因为,部分具有一定曲率的结构面迹线可直接通过最小代价路径方法自动生成,降低了点选数量。采用半自动提取后,增加了计算最小代价路径用时,每点平均用时有增加或减少,但由于点选数减少,总用时降低约40%,这说明给出的结构面迹线提取方法在选择点数一定时并不占优。但由于对同一条迹线,选择点数的减少使提取迹线总用时得到极大降低,故与人工提取相比,本方法能够大大提高岩体结构面迹线提取速度。

表1 结构面迹线提取情况统计
4 结论
基于三维激光扫描技术获取隧道施工开挖面三维点云数据,重建开挖面曲面模型,根据曲面中各三角形面片的位置特征及与相邻面片夹角特征计算指定路径起终点间最小代价路径,半自动提取出岩体结构面迹线,实现隧道开挖面岩体结构面迹线的快速提取,主要结论如下。
(1)基于三维点云数据,提出一种适用于隧道开挖面岩体扫描点云的三角网曲面构网方法,即根据隧道施工开挖面的形状特点,采用二次投影方法和平面Delaunay三角剖分法实现空间三维点云的三维曲面重构。该方法简单,易于实现,避免了错误的曲面构网。
(2)提出一种岩体结构面迹线半自动提取方法,提高了结构面迹线提取速度.准确度和自动化程度,该方法以岩体结构面迹线上选择的两关键点为线段起终点,筛选出距该线段距离较近的三角形边,计算三角形边与线段间夹角;同时计算三角形边两相邻三角形面的夹角。以两夹角作为特征参数建立权值函数,计算各三角形边权值,计算出两点间最小代价路径用于表示结构面迹线。
(3)通过多段线拟合,实现了对最小代价路径的曲线拟合,大大提高了结构面迹线的平滑程度,更有利于对隧道开挖面的进一步分析。
通过工程实例验证了方法的有效性,为提取隧道掌子面岩体结构面迹线提供了一种快速提取方法,减少了现场数据采集时间,提高了隧道工程地质数据采集的安全性,可为隧道设计和施工提供参考依据。
猜你喜欢
中国金属通报(2022年3期)2022-05-31
军事文摘(2021年16期)2021-11-05
燃烧科学与技术(2021年5期)2021-10-28
有色金属(矿山部分)(2021年4期)2021-08-30
科技创新导报(2021年33期)2021-04-17
课程教育研究(2018年22期)2018-07-18
海峡姐妹(2017年12期)2018-01-31
语文世界(初中版)(2017年5期)2017-06-22
作文与考试·初中版(2017年12期)2017-04-19
建筑建材装饰(2016年6期)2016-10-14